In dieser Lektion verwenden wir Python, um unser Raspberry Pi-Roboterauto so zu programmieren, dass es automatisch entlang einer schwarzen Linie auf weißem Grund fährt. Wir werden fünf IR-Tracking-Sensoren verwenden, um die Linie zu erkennen.
Sie erfahren, wie Python digitale Daten von GPIO-Pins liest.
Nein.
Bild
Gerät
Qty.
Zubehör
Verbinden
1
Tracking-Sensor-Modul
1
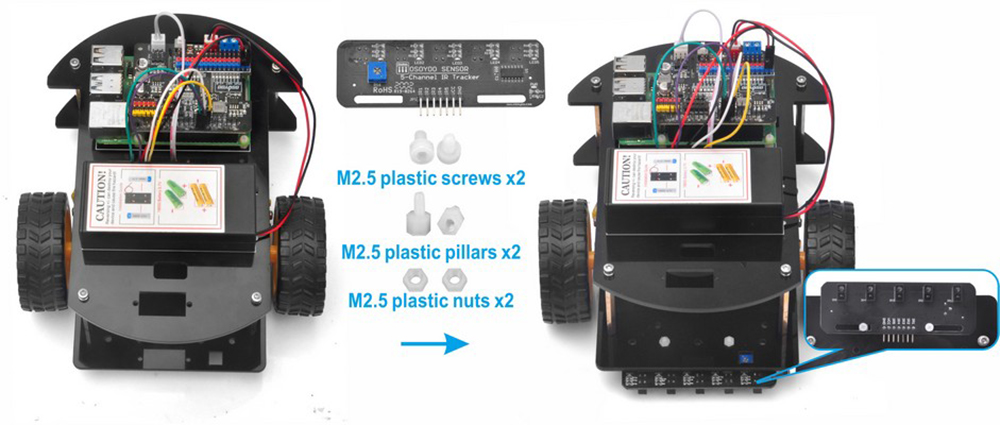
M2.5 Kunststoffschraube x 2
M2.5 Kunststoffmutter x2
M2.5 Kunststoffsäule x 2
Schritt 2: Installieren Sie Tracking-Sensormodule unter dem unteren Fahrzeugchassis mit 2 Stück M2,5-Kunststoffschrauben, M2,5-Kunststoffsäulen und M2,5-Kunststoffmuttern.
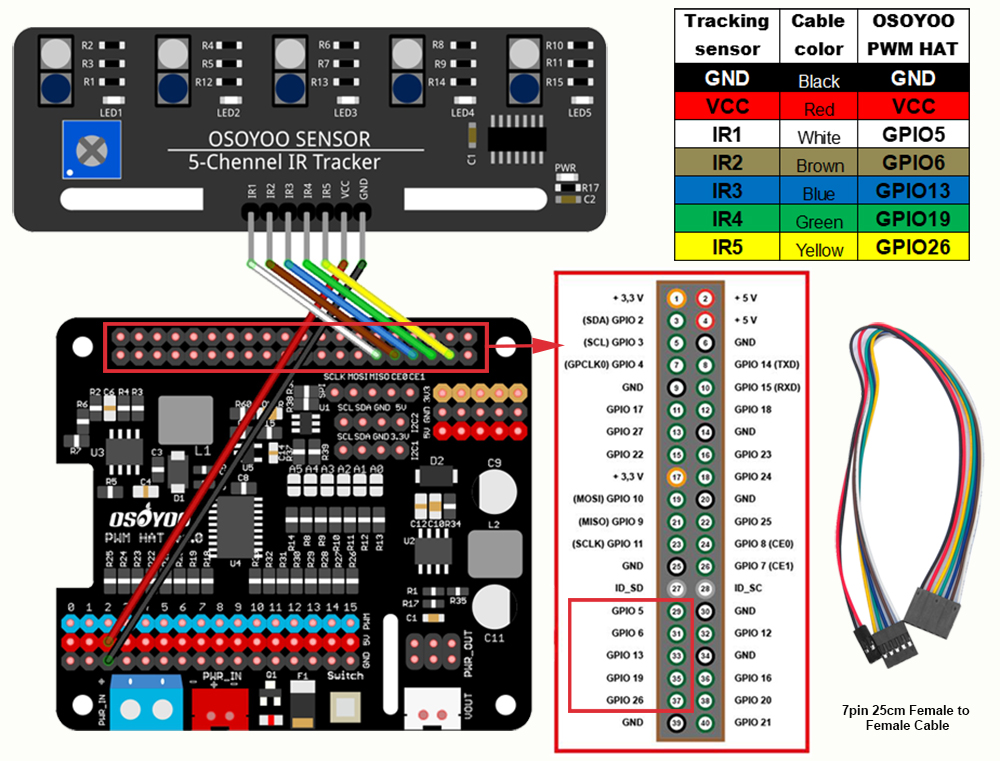
Schritt 1: Verbinden Sie den GND-VCC-Pin des Tracking-Sensormoduls mit dem 7-poligen 25-cm-Kabel von Buchse zu Buchse mit OSOYOO PWM HAT, wie das folgende Foto zeigt (Denken Sie daran: Entfernen Sie KEINE vorhandenen Drähte, die in Lektion 1 installiert wurden):
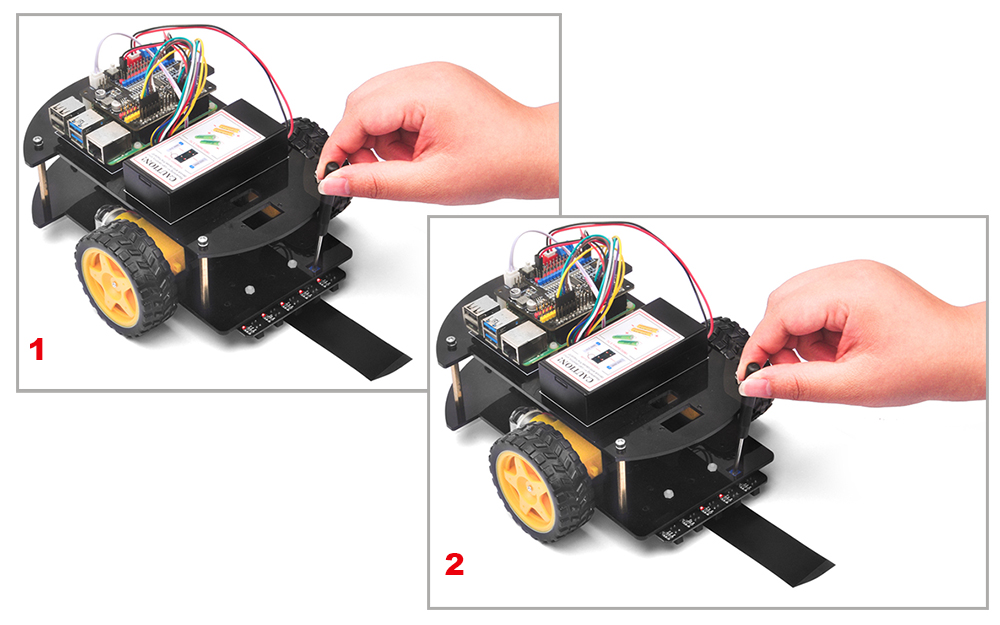
Schritt 2: Passen Sie die Empfindlichkeit der Tracking-Sensormodule an.
Schalten Sie das Auto ein, bereiten Sie eine schwarze Spurlinie auf weißem Grund vor und schalten Sie das Auto ein.
Stellen Sie das Fahrzeug wiederholt auf die schwarze Spur und den weißen Boden, um die Empfindlichkeit des Tracking-Moduls einzustellen.
Bitte stellen Sie das Potentiometer am Tracking-Sensor ein und stellen Sie sicher, dass die entsprechende Anzeige-LED leuchtet, wenn der Tracking-Sensor über schwarz steht, und die entsprechende Anzeige-LED ausgeschaltet ist, wenn der Tracking-Sensor über weiß ist.
Schritt 1: Stellen Sie sicher, dass Sie rpi.gpio, die Bibliothek adafruit-pca9685 installiert haben, und aktivieren Sie I2C in Lektion 1.
Schritt 2: Schalten Sie das Roboterauto ein und laden Sie dann den Python-Code herunter, indem Sie den folgenden Befehl in Ihr Raspberry Pi-Terminal eingeben:













 In dieser Lektion verwenden wir Python, um unser Raspberry Pi-Roboterauto so zu programmieren, dass es automatisch entlang einer schwarzen Linie auf weißem Grund fährt. Wir werden fünf IR-Tracking-Sensoren verwenden, um die Linie zu erkennen.
In dieser Lektion verwenden wir Python, um unser Raspberry Pi-Roboterauto so zu programmieren, dass es automatisch entlang einer schwarzen Linie auf weißem Grund fährt. Wir werden fünf IR-Tracking-Sensoren verwenden, um die Linie zu erkennen.