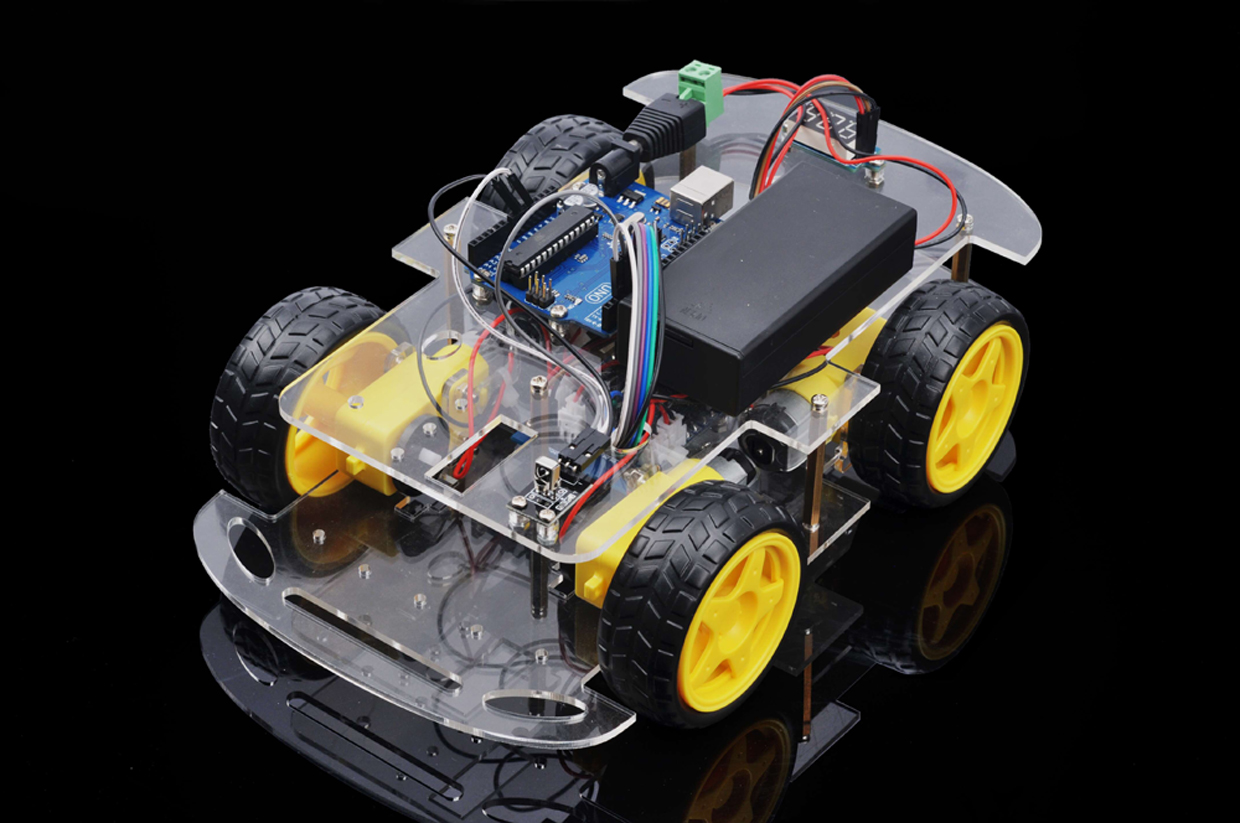
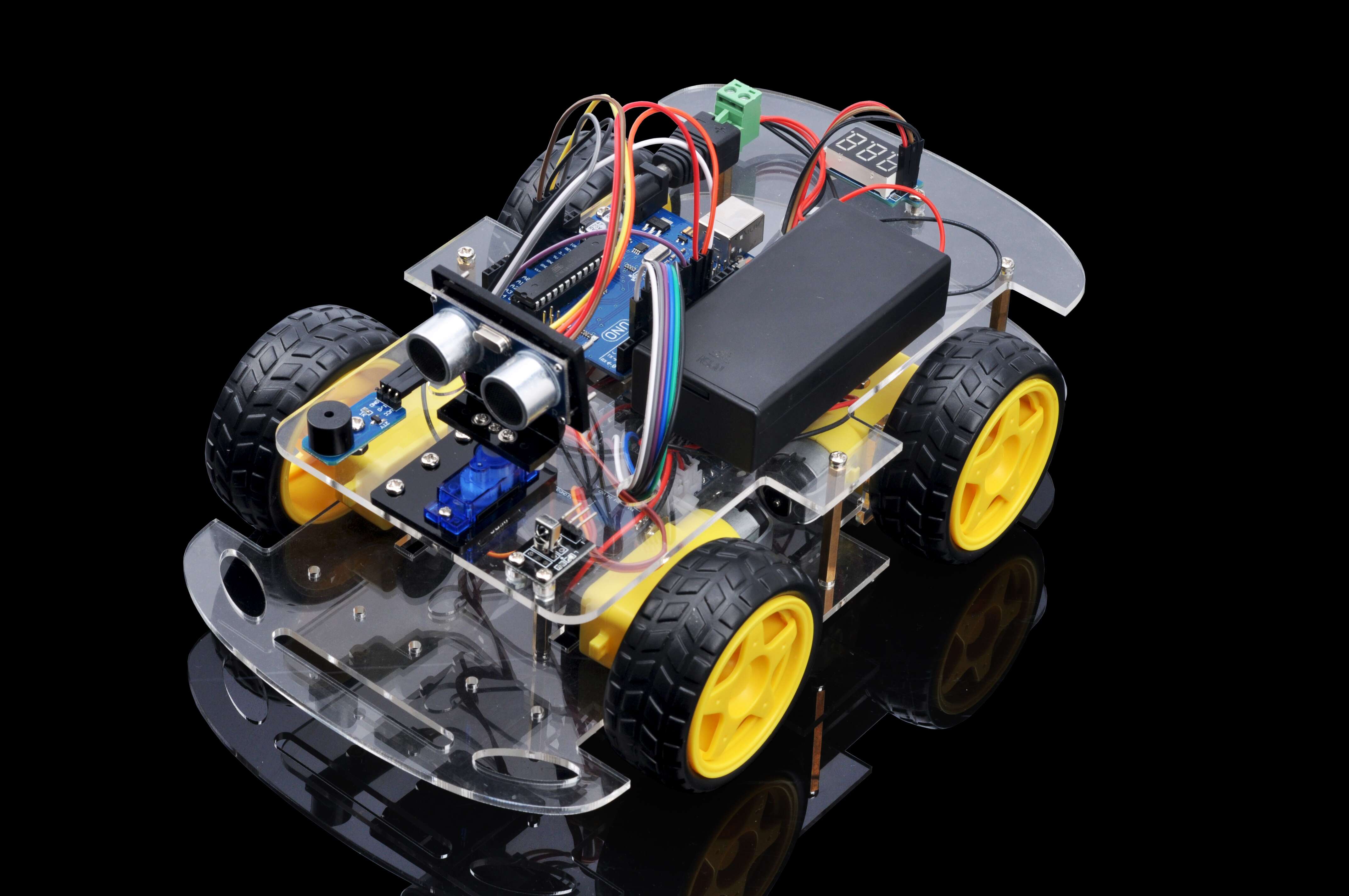
OSOYOO robotic car learning kit is designed for beginners to learn Arduino programming and get hands-on experience on robot design and assembly.
We have developed a step-by-step tutorial which evolves from a simple car without any control to a multi-function robotic car controlled by mobile APP.
Every lesson has detailed sample code with comments,circuit graph, assembly instruction and video. Even if you have no programming experience, you can follow the step-by-step instruction and gradually become a master.
Our robotic car is 100% open source. If you are an intermediate player and have time to read our code comments, you can easily customize this robotic car to make your own project for science fair, college home work or even commercial applications.
This kit contains module parts including OSOYOO MODEL X motor driver module(*), Ultrasonic Sensor module, Tracking module, Infrared Remote Control, Bluetooth module and ESP8266 WIFI shield, etc. With these modules, the robot car can work in multiple modes such as auto-go, infrared control, obstacle avoidance and line tracking. You can use our Android APP to change working mode through WIFI or Bluetooth.
*OSOYOO MODEL X motor driver module is an improved L298N module which has newly designed wiring sockets and can greatly simplify the assembly procedure and wire connection stability.
1Mount holder for SG90 servo Motor and ultrasonic sensor module
Buzzer sensor module
IR receiver
IR remote controller
1Box for 18650 3.7V battery
DC power connector with wires
Voltage meter
Lower chassis
Upper chassis
Gear motor with wires
(Acrylic fastener for Gear Motor x8
Velocity encoder x4)
Wheel
8pin Jumper wires (female to female)
20pin Jumper wires (male to female)
1 pin male to 5pin female Jumper wires
Cross screwdriver
Basic Tutorials
Here we have prepared some basic tutorials for the users who are not familiar with Arduino, this section will show you what Arduino is, and teach you how to start some simple Arduino projects. Arduino is the largest open-source hardware platform in the world and offers infinite possibilities on what you can achieve using simple microcontroller-based products. Learning how to program using the Arduino platform is a never-ending process.
We believe with this hardware + software support , you are able to become expert programmer ( developer ) very soon . so don’t wast time , just get this kit , and start your project right away !
Good
the montage of the MART CAR
1ºThe module that looks mounted is L298 x because the question is can I mount the L298 N or the 298 hex
2º The module mounted expansion boar ESP8266 then I can mount sensor shield module digital analog 5v expansion
is that the others are very expensive and for my pension noda pension for everything is that I want to be able to ride it for my granddaughters
Thanks for the answers
1) You can change the module to classic L298N if you know how to connect the wirese to L298N, Arduino and Motor. You might need to read our sample code in Lesson one. Normally we suggest you to use our MODEL X motor driver module which is much easier for you to make connection than L298N
2)This product has much better quality/value ratio,installation conveniece than other Robot car in the market. If you want to help your granddaughter learn Arduino Robot, this kit should be a good start.
Ciao ho appena finito di costruire la macchina , ho 2 problemi :
la funzione ostacoli non è precisa , il sensore rileva l ostacolo dopo aver sbattuto .
e poi non ho capito come regolare i sensori di tracciamento
Hi I just finished building the car, I have 2 problems:
the obstacle function is not precise, the sensor detects the obstacle after banging.
and then I did not understand how to adjust the tracking sensors
Hi, I just finnished lesson 1. I am looking at the code and am not sure about the syntax of “digitalWrite(dir1PinL, HIGH);” As I undersand it the digitalWrite command needs a pin number as the first argument. I do not see where dir1PinL was declaired as a constant represnting the output pin.
Is this done for us in the configuration.h include? Can someone explain this?
Help! I built the car and turned it on and the voltage meter works and shows the battery voltage is at around 7.4-7.5 but the osoyoo board will not turn on. It does however light up when it is plugged in through the usb cord and the code seems to download but when I unplug it and turn it on the only thing that goes on is the battery voltage meter and the motor driver board. I’m not sure what to do and have checked all wiring which seems to be correct. Please help!
I’m having a similar problem. My board lights up at first but turns off after reading the voltage. The wheels make a quick move and then everything shuts down. I am commenting so I will see the responses you are given from someone who might know what to do.
It seems that your Arduino IDE can not find the configuration.h file.
make sure you have the code #include “configuration.h” in the top of your code, otherwise it will show ‘dir1PinL’ was not declared in this scope.
If you are running the lesson 1 project. You must download the zip file from https://osoyoo.com/driver/smartcar-lesson1.zip. Then unzip the file and get a new folder named smartcar-lesson1 which as two files inside:configuration.h and smartcar-lesson1.ino.
you must double click the file smartcar-lesson1.ino to open Arduino IDE. This will let Arduino IDE know your running the file in smartcar-lesson1 folder which has configuration.h file.
It wants me to define dir1PinL 2, dir2PinL 4, speedPinL 6, dir1PinR 7, dir2PinR 8 and speedPinR 5.
I have no problem when I download the code but I only have one file in the zip folder. Can you send me the missing file or something like that?
Hello. I built lesson 1 and ran car. Only the wheels on one side turn. I checked all wiring with same result. I switched the plugs on the model-x motor shield for k1 k3 and k2 k4. Now, only the wheels on the other side turn. I think there is something wrong with the model-x motor shield. I also tried building IR lesson to control with remote and only wheels on one side turn with forward and backward commands sent.
I continued building the rest of the lessons. Since only one side of the car operates I can only guess if it’s doing what it is supposed to be doing. I can connect and semi-control it using bluetooth but not wifi. The wifi is named ESP_0B2381 instead of the doit_wificonfig. I can connect to it with my phone, but the app doesn’t connect to it.
Hello. I built lesson 1 as indicated.
I have Windows 7. I cannot run the code on the car board. I connected the PC with the card board with the PC via USB cable.
When I do right click to “My computer >> Manager >> Device Manager >> Ports” I cannot find the port that car board is connected. The only thing I found is “Unknown device”, so it is like the PC does not recognize the board.
I checked twice all wire connections, but anyways I think the problem still the communication between the PC and the car board.
Please help.
I have a problem with uploading. I get error code:avrdude:st500_recv():programmer is not responding.
Avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0*d2 .
Wenh I upload the program.please help.
I received the CD with the kit, but my laptop does not have CD drive. Is there a download for this? Is it even needed if I just use above links and work instructions?
Thanks,
David
Hi, Recently bought the robot car, based on lesson 1, i assembled the car, double checked, all wiring are correct. uploaded the lesson 1 no issue. but when i switched on the car, the voltmeter shows 8.4, but the car is not moving. I noticed when i connected the car thru USB and switched on the battery on, the car is moving. what i am missing.
How can we use the additional pins (0,2,4,5,12,13,14,15,16) next to the 3v3 on the ESP8266 expansion board?
What are the pin name values we need to configure in arduino to use the pins?
which battery to buy
I bought 18650 3.7v battery,
it doesn’t fit the battery box
also when I adjusted the spring in the battery box
within moments it started to burn
Hi friend,
Do you solve this issue?
I’m sorry that there are something wrong with our website before, and I can’t see your comment.
If any query, please feel free to contact with my email address: [email protected].
Elaine
I have completed all the steps for lesson 5 and I am able to connect through my phone via Bluetooth and Wi-Fi. Once connected I can not control the car with the app. There is no response to me pressing any button.
Hello, I uploaded the Lesson 1 and the code works fine but there is no movement to the car. Although I changed my batteries with fresh, fully charged batteries, my voltmeter still reads 3.9 and there is no movement to the car. What am i doing wrong?
If your lesson 1 code is successfully uploaded but your car does not move. Normally it means your power connection is broken. check the installation guide of 4 wires(two red and two black) in DC connector in https://osoyoo.com/2019/01/how-to-properly-install-wires-in-dc-connectors/ , make sure the red wires must connected in the plus(+) hole and black wires must be connected in minus(-) hole.
If connection is correct, both UNO board and the Model X board should have LED light on.
Hello,
I built and uploaded Lesson 1.
It worked a couple of times, but now the wheels are not turning anymore.
I can hear some clicking sound, as if something was trying to make the wheels turn.
All leds are blinking as they should be (I think) and the voltmeter reads 8.2V.
How can I check everything is fine?
Is there a way to “debug” the output to the motors with the USB cable plugged in, or showing the output on the voltmeter?
What’s the max each motor can get if I want to plug them directly to a battery?
Thanks in advance.
Hi,
Thanks a lot for your quick reply.
I didn’t exactly follow your tutorial as I’m using the Sensor Shield v5 included in the box.
But I followed your suggestion of going to the lesson that uses the IR remote controller.
The result is:
– nothing happens for forward and turn right commands
– one led blinks on the sensor shield board on the backward command, there’s kind of a small clicking sound but the motors stay still
– the turn left command works fine (!), which means the motors are working, and no led blinks on the sensor shield
The voltmeter now reads 7.8V
Olivier
Hi,
I made some progress. I used Serial to see the actual readings from the IR controller. I found out that the forward and right buttons are not working…
So I changed the code to use other buttons.
As far as I can see:
– the analogWrite for the speed of the motor should not exceed 160
– it should also not be below ~60
Does that sound right? Why can’t I use the whole 0-255 range?
Olivier
If you are talking about the imitation driving lesson or wifi lesson or IR control lesson? the 60 to 160 speed is set by our code. If motor speed is less than 60, electricity current is too low to power the motor. So we use program to force speed not less than 60. If speed is over 160, then the speed might be too fast and some new user can not control the car. You can read the code and remove such constrain. Just tell me which lesson you are talking about, I will show you how to change the code.
Hi,
Thanks for your replies.
Since I finished lesson 2 with the IR sensor, I’m not following any lesson anymore, but playing with the code.
I now understand it is normal to have speed of at least 60, otherwise the motors don’t get enough power.
However, I still don’t understand why we cannot set a max speed of 255. It’s not about controlling the car, as I removed the wheels for my tests 😉
It’s that the motors don’t move at all if speed is set too high.
I’ll keep playing around.
Thanks.
Olivier



























Good
the montage of the MART CAR
1ºThe module that looks mounted is L298 x because the question is can I mount the L298 N or the 298 hex
2º The module mounted expansion boar ESP8266 then I can mount sensor shield module digital analog 5v expansion
is that the others are very expensive and for my pension noda pension for everything is that I want to be able to ride it for my granddaughters
Thanks for the answers
1) You can change the module to classic L298N if you know how to connect the wirese to L298N, Arduino and Motor. You might need to read our sample code in Lesson one. Normally we suggest you to use our MODEL X motor driver module which is much easier for you to make connection than L298N
2)This product has much better quality/value ratio,installation conveniece than other Robot car in the market. If you want to help your granddaughter learn Arduino Robot, this kit should be a good start.
Ciao ho appena finito di costruire la macchina , ho 2 problemi :
la funzione ostacoli non è precisa , il sensore rileva l ostacolo dopo aver sbattuto .
e poi non ho capito come regolare i sensori di tracciamento
Hi I just finished building the car, I have 2 problems:
the obstacle function is not precise, the sensor detects the obstacle after banging.
and then I did not understand how to adjust the tracking sensors
I believe your ultrasonic sensor does not adjust properly. You need read
https://osoyoo.com/2017/05/10/arduino_car_obstacle_avoidance/#7 . Once the ultrasonic sensor is facing direct front, it should work properly.
Hi, I just finnished lesson 1. I am looking at the code and am not sure about the syntax of “digitalWrite(dir1PinL, HIGH);” As I undersand it the digitalWrite command needs a pin number as the first argument. I do not see where dir1PinL was declaired as a constant represnting the output pin.
Is this done for us in the configuration.h include? Can someone explain this?
Thanks
dir1PinL is defined in configuration.h file which is in the same folder of your sketch file (smartcar-lesson1 folder)
Why my car is too fast ? In the obstacle function it bang with the wall , and with tracking it go out line
You can change the speed by edit the configuration.h file line 18:
#define SPEED 150
change the value 150 to some lower value like 130,120 etc and try again.
Also make sure you have did ultrasonic sensor direction alignment. read following link:
https://osoyoo.com/2017/05/10/arduino_car_obstacle_avoidance/#7
Help! I built the car and turned it on and the voltage meter works and shows the battery voltage is at around 7.4-7.5 but the osoyoo board will not turn on. It does however light up when it is plugged in through the usb cord and the code seems to download but when I unplug it and turn it on the only thing that goes on is the battery voltage meter and the motor driver board. I’m not sure what to do and have checked all wiring which seems to be correct. Please help!
I’m having a similar problem. My board lights up at first but turns off after reading the voltage. The wheels make a quick move and then everything shuts down. I am commenting so I will see the responses you are given from someone who might know what to do.
your battery seems not very good. Normally good battery after fully charged should read 8.4 to 8.7 volt. I suggest you find some free 18650 battery from old laptop(you can get it from your local electronics recycle depot), laptop battery has higher capacity than many cheap batteries. read following:
https://osoyoo.com/2018/02/17/how-to-recycle-18650-rechargeable-li-ion-battery-from-old-laptop-computer/
I downloaded sample code and I continue to get the error ‘dir1PinL’ was not declared in this scope. Any suggestions?
//Pins initialize
void init_GPIO()
{
pinMode(dir1PinL, OUTPUT);
pinMode(dir2PinL, OUTPUT);
pinMode(speedPinL, OUTPUT);
pinMode(dir1PinR, OUTPUT);
pinMode(dir2PinR, OUTPUT);
pinMode(speedPinR, OUTPUT);
stop_Stop();
}
It seems that your Arduino IDE can not find the configuration.h file.
make sure you have the code #include “configuration.h” in the top of your code, otherwise it will show ‘dir1PinL’ was not declared in this scope.
If you are running the lesson 1 project. You must download the zip file from https://osoyoo.com/driver/smartcar-lesson1.zip. Then unzip the file and get a new folder named smartcar-lesson1 which as two files inside:configuration.h and smartcar-lesson1.ino.
you must double click the file smartcar-lesson1.ino to open Arduino IDE. This will let Arduino IDE know your running the file in smartcar-lesson1 folder which has configuration.h file.
what is the voltage meter reading? Make sure your voltage is over 8.0 Volt.
I am at the end of the lesson 1 but I haven’t got the file configuration.h. Where I can find it?
Configuration.h sets in code, as someone can’t upload the code with Configuration.h
So how can I do?
You can see the configuration data at the beginning of code.
Do you meet some error when you upload the code?
It wants me to define dir1PinL 2, dir2PinL 4, speedPinL 6, dir1PinR 7, dir2PinR 8 and speedPinR 5.
I have no problem when I download the code but I only have one file in the zip folder. Can you send me the missing file or something like that?
please give me your email address or you send message to my email address: [email protected]
who has the lessons that can happen to me this is my email [email protected] is something urgent.
what is your problem? Please give detail of the error message in which lesson so that we can help you.
Thanks
Hello. I built lesson 1 and ran car. Only the wheels on one side turn. I checked all wiring with same result. I switched the plugs on the model-x motor shield for k1 k3 and k2 k4. Now, only the wheels on the other side turn. I think there is something wrong with the model-x motor shield. I also tried building IR lesson to control with remote and only wheels on one side turn with forward and backward commands sent.
I continued building the rest of the lessons. Since only one side of the car operates I can only guess if it’s doing what it is supposed to be doing. I can connect and semi-control it using bluetooth but not wifi. The wifi is named ESP_0B2381 instead of the doit_wificonfig. I can connect to it with my phone, but the app doesn’t connect to it.
Hello. I built lesson 1 as indicated.
I have Windows 7. I cannot run the code on the car board. I connected the PC with the card board with the PC via USB cable.
When I do right click to “My computer >> Manager >> Device Manager >> Ports” I cannot find the port that car board is connected. The only thing I found is “Unknown device”, so it is like the PC does not recognize the board.
I checked twice all wire connections, but anyways I think the problem still the communication between the PC and the car board.
Please help.
Hello
I want you to send me all the libraries related to this project.
My email is: [email protected]
I have a problem with uploading. I get error code:avrdude:st500_recv():programmer is not responding.
Avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0*d2 .
Wenh I upload the program.please help.
I received the CD with the kit, but my laptop does not have CD drive. Is there a download for this? Is it even needed if I just use above links and work instructions?
Thanks,
David
Hi,
For 3.7 volt battery 18650 , how many mah (milli-Ampere ho ur) this battery should have ?
we suggest you buy 18650 with capacity no less than 2000 mAh.
Hi, Recently bought the robot car, based on lesson 1, i assembled the car, double checked, all wiring are correct. uploaded the lesson 1 no issue. but when i switched on the car, the voltmeter shows 8.4, but the car is not moving. I noticed when i connected the car thru USB and switched on the battery on, the car is moving. what i am missing.
Thanks
Your DC connect wiring should be loosing. Check the 4 wires in the circle of following picture https://osoyoo.com/wp-content/uploads/2017/04/2-1-1024×682.jpg
, reconnect the 4 wires in that circle. It should work.
How can we use the additional pins (0,2,4,5,12,13,14,15,16) next to the 3v3 on the ESP8266 expansion board?
What are the pin name values we need to configure in arduino to use the pins?
Thanks!
just completed the first tutorial, but when I started the car to test it didn’t move. Please Help
which battery to buy
I bought 18650 3.7v battery,
it doesn’t fit the battery box
also when I adjusted the spring in the battery box
within moments it started to burn
pl advice
Whenever I use the bluetooth or wifi function, both left wheels cant seem to turn forward, any suggestions?
Hi friend,
Do you solve this issue?
I’m sorry that there are something wrong with our website before, and I can’t see your comment.
If any query, please feel free to contact with my email address: [email protected].
Elaine
I have completed all the steps for lesson 5 and I am able to connect through my phone via Bluetooth and Wi-Fi. Once connected I can not control the car with the app. There is no response to me pressing any button.
Hello, I uploaded the Lesson 1 and the code works fine but there is no movement to the car. Although I changed my batteries with fresh, fully charged batteries, my voltmeter still reads 3.9 and there is no movement to the car. What am i doing wrong?
If your lesson 1 code is successfully uploaded but your car does not move. Normally it means your power connection is broken. check the installation guide of 4 wires(two red and two black) in DC connector in https://osoyoo.com/2019/01/how-to-properly-install-wires-in-dc-connectors/ , make sure the red wires must connected in the plus(+) hole and black wires must be connected in minus(-) hole.
If connection is correct, both UNO board and the Model X board should have LED light on.
Hello,
I built and uploaded Lesson 1.
It worked a couple of times, but now the wheels are not turning anymore.
I can hear some clicking sound, as if something was trying to make the wheels turn.
All leds are blinking as they should be (I think) and the voltmeter reads 8.2V.
How can I check everything is fine?
Is there a way to “debug” the output to the motors with the USB cable plugged in, or showing the output on the voltmeter?
What’s the max each motor can get if I want to plug them directly to a battery?
Thanks in advance.
Hello,
Please check whether the UNO and Model X and motor work well. You can follow the tutorial:follow the link: https://osoyoo.com/2018/08/20/arduino-lesson-use-the-ir-control-to-control-a-dc-motor-remotely/
Please tell me which part not work and I’ll help you to solve this issue.
Elaine
Hi,
Thanks a lot for your quick reply.
I didn’t exactly follow your tutorial as I’m using the Sensor Shield v5 included in the box.
But I followed your suggestion of going to the lesson that uses the IR remote controller.
The result is:
– nothing happens for forward and turn right commands
– one led blinks on the sensor shield board on the backward command, there’s kind of a small clicking sound but the motors stay still
– the turn left command works fine (!), which means the motors are working, and no led blinks on the sensor shield
The voltmeter now reads 7.8V
Olivier
Hi,
I made some progress. I used Serial to see the actual readings from the IR controller. I found out that the forward and right buttons are not working…
So I changed the code to use other buttons.
As far as I can see:
– the analogWrite for the speed of the motor should not exceed 160
– it should also not be below ~60
Does that sound right? Why can’t I use the whole 0-255 range?
Olivier
You mentioned that “– the analogWrite for the speed of the motor should not exceed 160
– it should also not be below ~60”
Can you tell me which lesson you are talking about? The lesson 2 IR control or the lesson 5 Bluetooth control?
If you are talking about the imitation driving lesson or wifi lesson or IR control lesson? the 60 to 160 speed is set by our code. If motor speed is less than 60, electricity current is too low to power the motor. So we use program to force speed not less than 60. If speed is over 160, then the speed might be too fast and some new user can not control the car. You can read the code and remove such constrain. Just tell me which lesson you are talking about, I will show you how to change the code.
hi,Olivier
As you mentioned the Sensor Shield v5, this car is called Model 3 robot car. I believe you read wrong tutorial link.
Correct tutorial for Model 3 robot car is as follows:
https://osoyoo.com/2019/09/17/osoyoo-2wd-robot-car-v2-0-starter-kit-tutorial-introduction/
Thanks
osoyoo support team
Hi,
Thanks for your replies.
Since I finished lesson 2 with the IR sensor, I’m not following any lesson anymore, but playing with the code.
I now understand it is normal to have speed of at least 60, otherwise the motors don’t get enough power.
However, I still don’t understand why we cannot set a max speed of 255. It’s not about controlling the car, as I removed the wheels for my tests 😉
It’s that the motors don’t move at all if speed is set too high.
I’ll keep playing around.
Thanks.
Olivier
Hi,what is the gear ratio and voltage requirements of the gear motor provided in the kit?
Hi, is there a online sorce code reository hosted for V1.0 eg. at github.com?
Can someone provide a URL and commit ID of version V1.0?
Thans, Tom