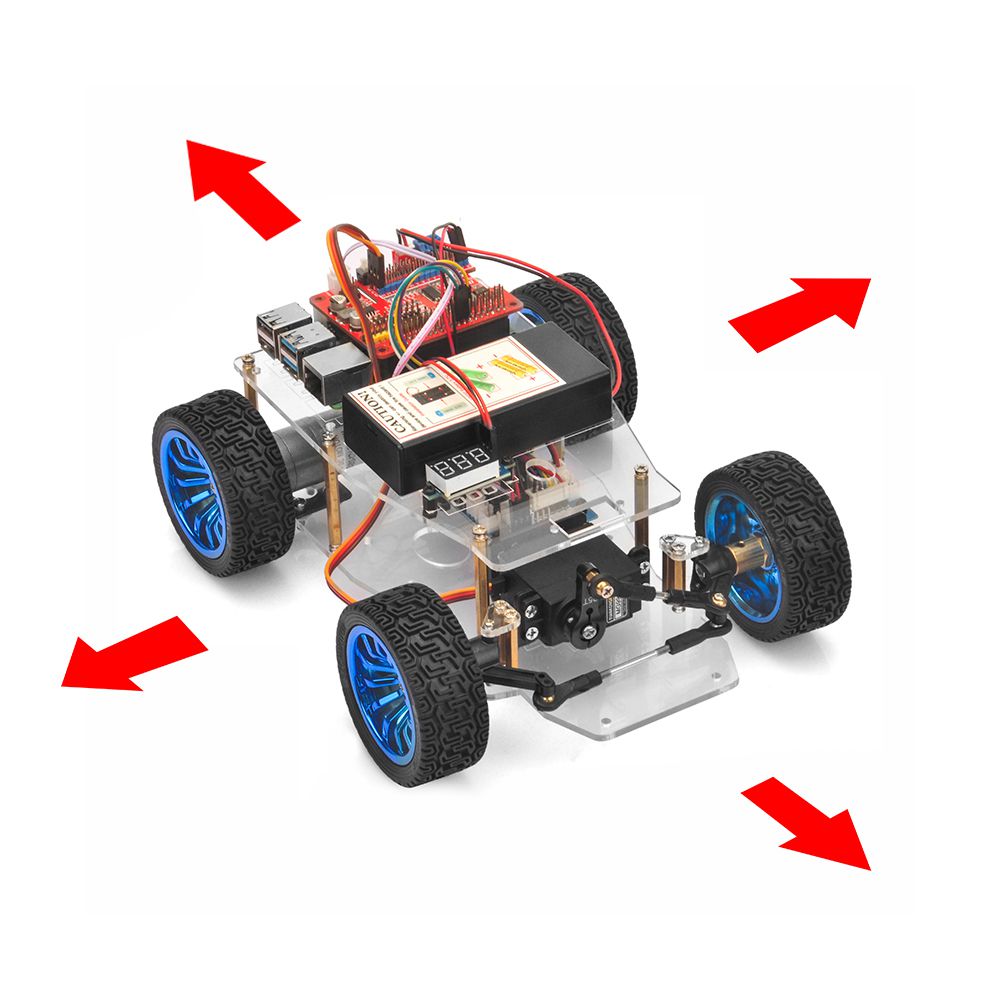
En este tutorial, simplemente le diremos cómo instalar Raspberry Pi OS para Raspberry pi y cómo usar la consola para controlar raspberry pi. Usaremos OSOYOO Servo Steer Smart Car para Raspberry Pi para hacer algunos movimientos simples. Una vez que se completa la instalación del automóvil, es muy importante probar la instalación y el código de muestra. Si ha pasado el movimiento de prueba de esta lección, significa que Raspberry pi, motores, batería, placa modelo X, servomotor y conexiones de cable entre estas partes funcionan bien, y puede continuar con otras lecciones de muestra.
Si no completa el bastidor del automóvil, revise la lección 1
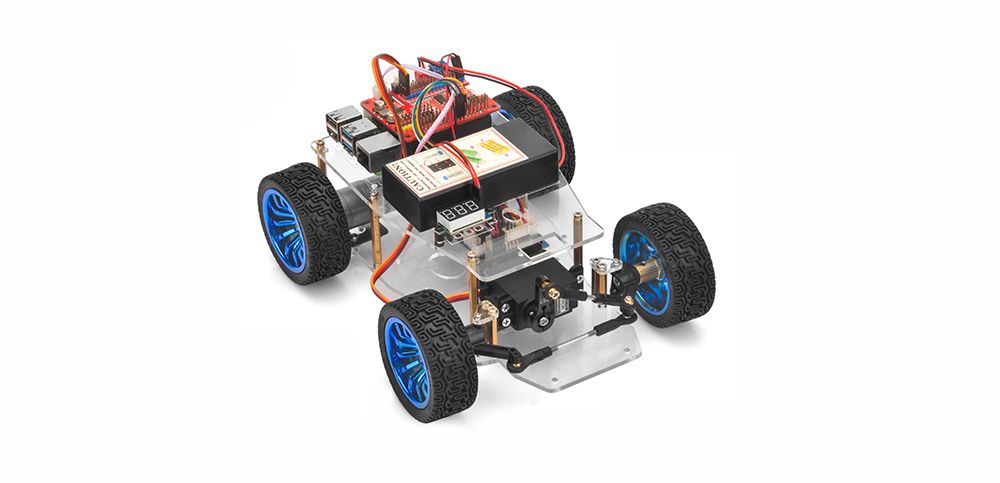
Servo Steer Smart Car para Raspberry Pi (con placa raspberry pi) x1
Tarjeta Micro SD (más de 8 GB) x1
Lector de tarjetas Micro SD x1
OSOYOO 5 pulgadas Pantalla táctil DSI para Raspberry Pi x1
Sistema de operación para este coche robot:Raspberry Pi Legacy (buster) . Tenga en cuenta que estos proyectos de muestra de coches robot NO son compatibles con Raspberry Pi New Bullseye OS. Así que no te equivoques en la descarga del sistema operativo.
Estos son los pasos para instalar el sistema operativo heredado de Raspberry Pi: Paso 1: Descargue el sistema operativo Raspberry Pi Buster (OS) y grábelo en la tarjeta SD (omita este paso si su tarjeta SD tiene preinstalada la imagen de Rpi Buster OS).
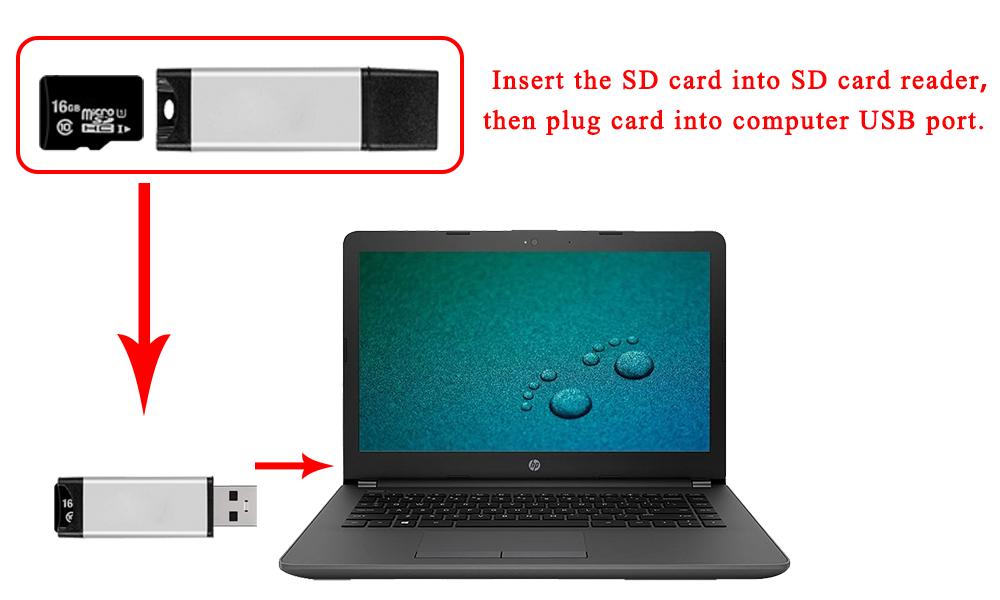
Prepare una nueva tarjeta Micro SD (más de 8 GB) e insértela en el lector de tarjetas micro SD USB, y conecte el lector de tarjetas micro SD USB con su PC.
A. Uso directo de la consola
Nota: Se necesita un monitor de pantalla cuando se utiliza la consola directamente.
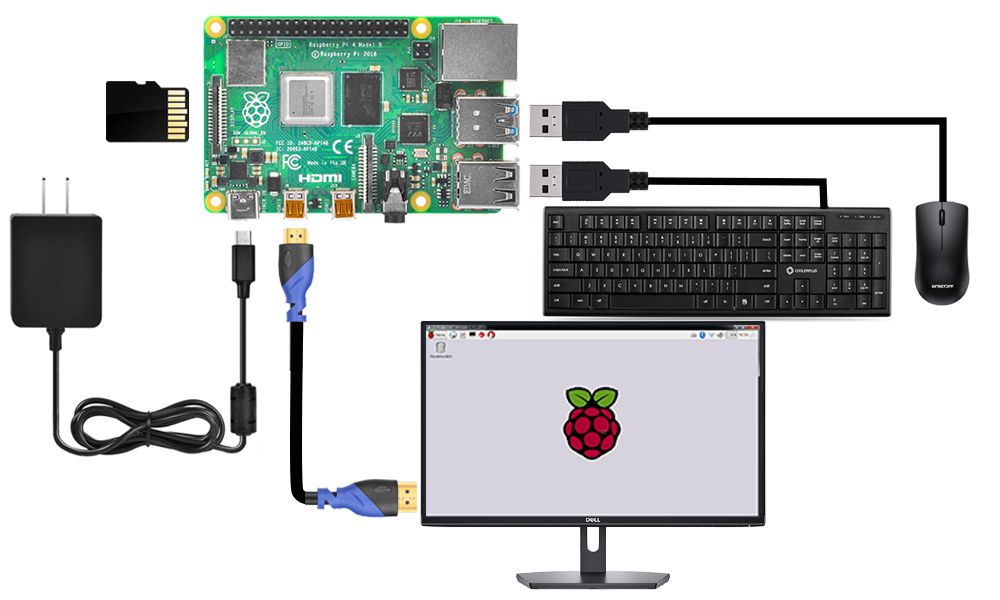
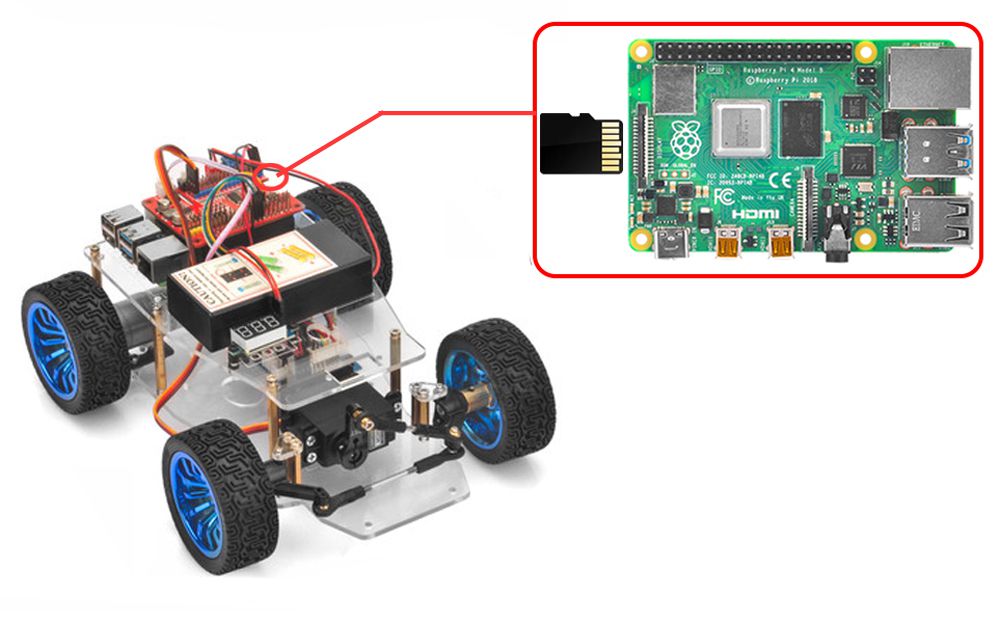
1. Conecte Raspberry Pi a su monitor HDMI o TV. Coloque un teclado y un mouse en los puertos USB de Raspberry Pi. Inserte la tarjeta SD en la ranura de su Raspberry Pi de la siguiente manera:
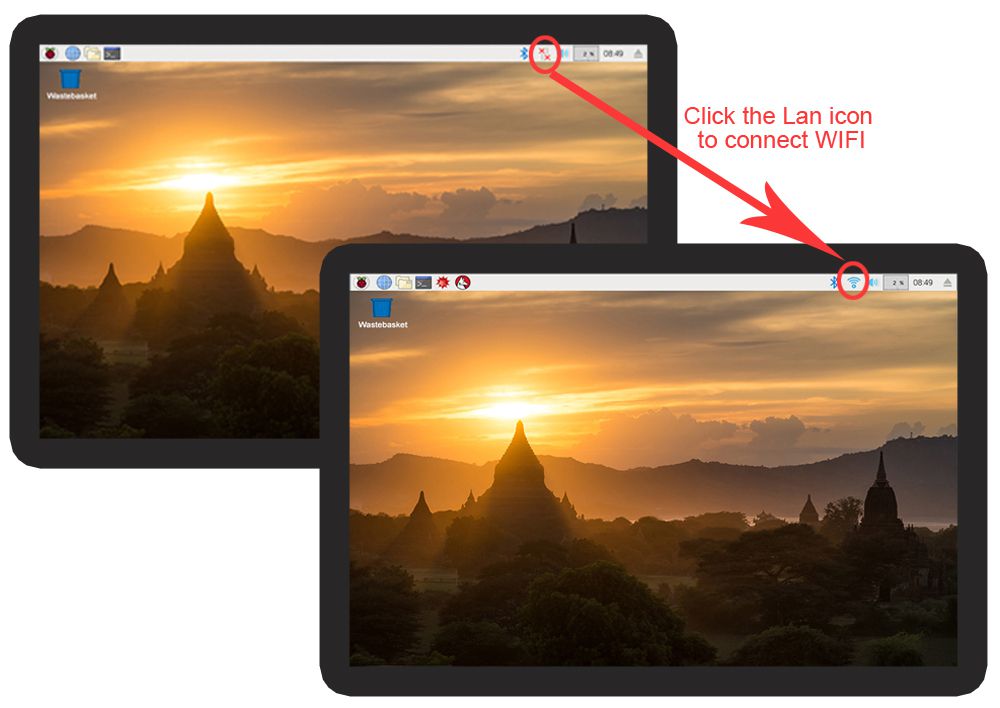
2. Haga clic en el icono de LAN en el conner superior derecho, seleccione su SSID WIFI e ingrese la palabra de su wifi para conectar el punto de acceso wifi. Luego puedes ver la consola a pantalla completa.
3. Si se mueve sobre el icono de LAN y recibe el aviso de la siguiente manera:
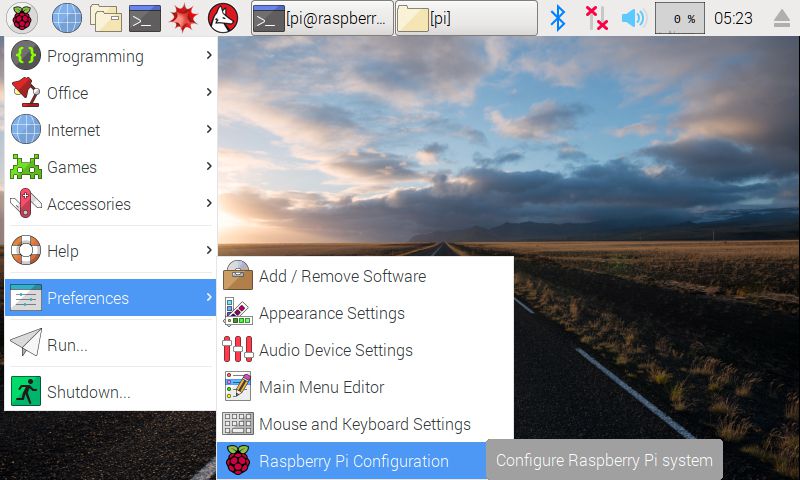
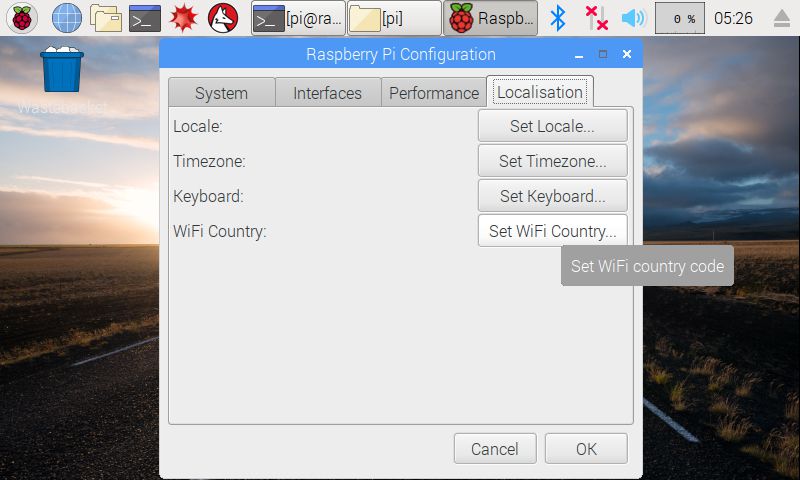
4. Haga clic en configurar la localización WIFI de la siguiente manera:
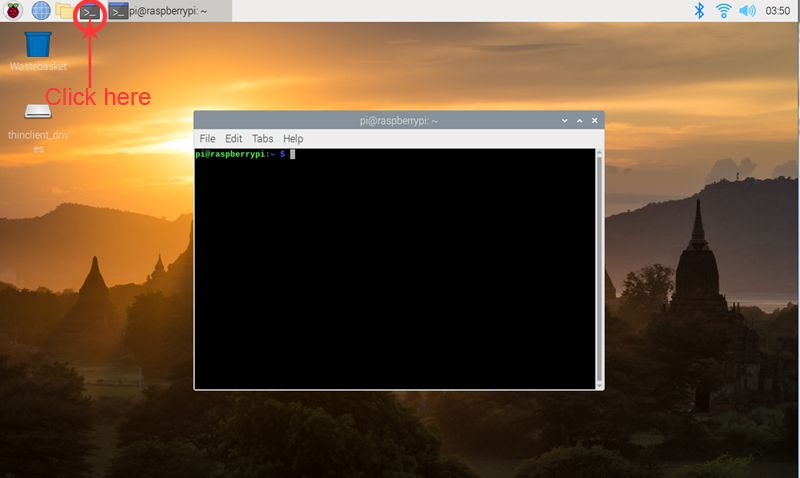
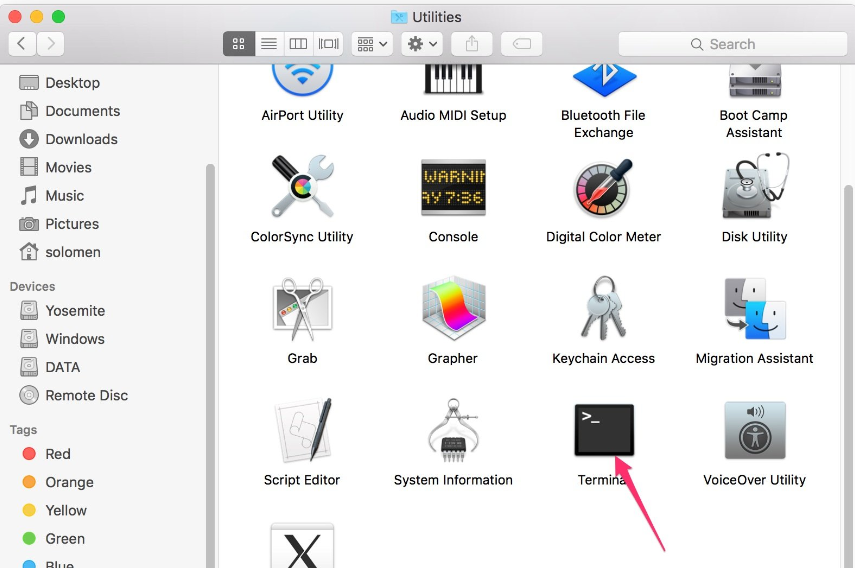
5. Haga clic en el icono de Terminal en la pantalla, o presione CTRL + ALT + T simultáneamente, luego aparecerá un terminal de la siguiente manera:
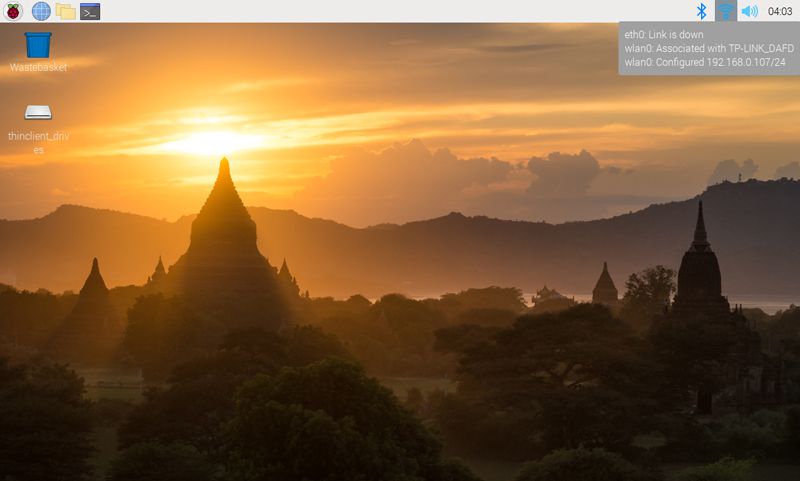
6. Averigüe la dirección IP del RPi. Método A: conecte su Pi al monitor y al mouse, haga clic en el icono LAN o WIFI para obtener la dirección IP como siguiente foto
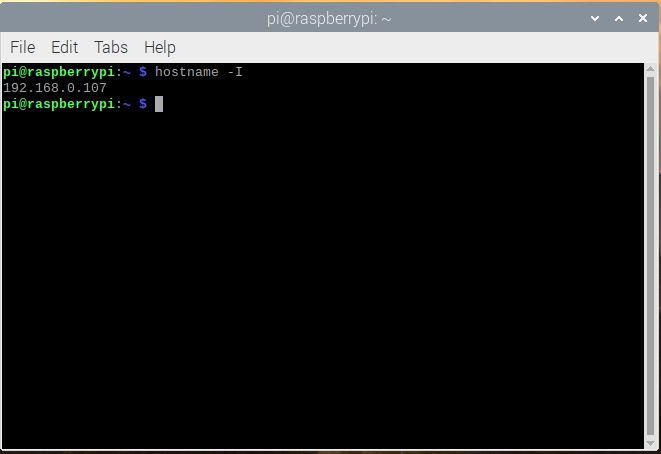
Método B: también puede encontrar la dirección IP escribiendo el comando terminal :
hostname -I
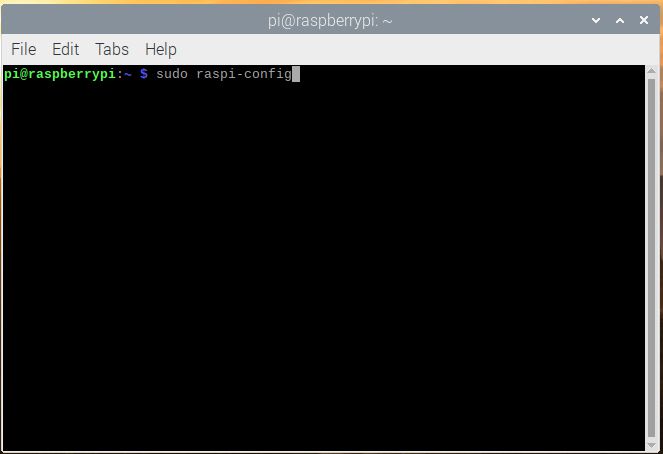
7. Habilitar SSH
Escribiendo comando de terminal:
sudo raspi-config
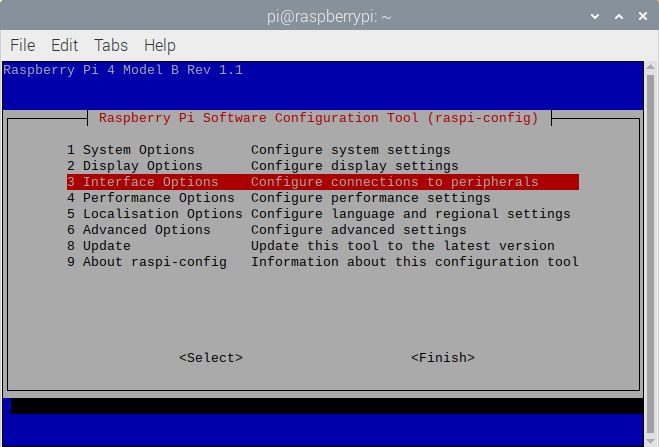
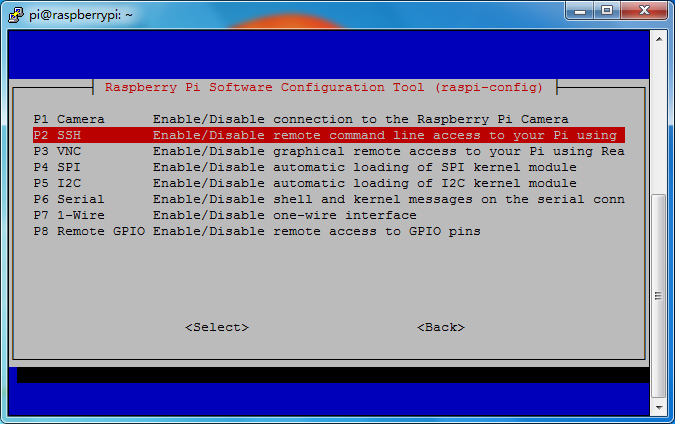
Vaya al menú de configuración, vaya a Interface Options ->SSH -> Select -> Yes ->Finish (Nota: use “flechas” en el tecladopara colocar el cursor donde desea ir y presione “enter” para confirmar la selección)
B. Uso de la consola de forma remota
Nota: Para la versión 2016-11-25 o superior, SSH (un protocolo que protege la sesión de inicio de sesión remoto y otro servicio de red) está deshabilitado de forma predeterminada. Por lo tanto, cuando necesite iniciar sesión de forma remota, primero debe habilitar ssh.
1. Inserte la tarjeta Micro SD que se graba con Raspberry Pi OS en el lector de tarjetas micro SD USB y conecte el lector de tarjetas micro SD USB con su PC.
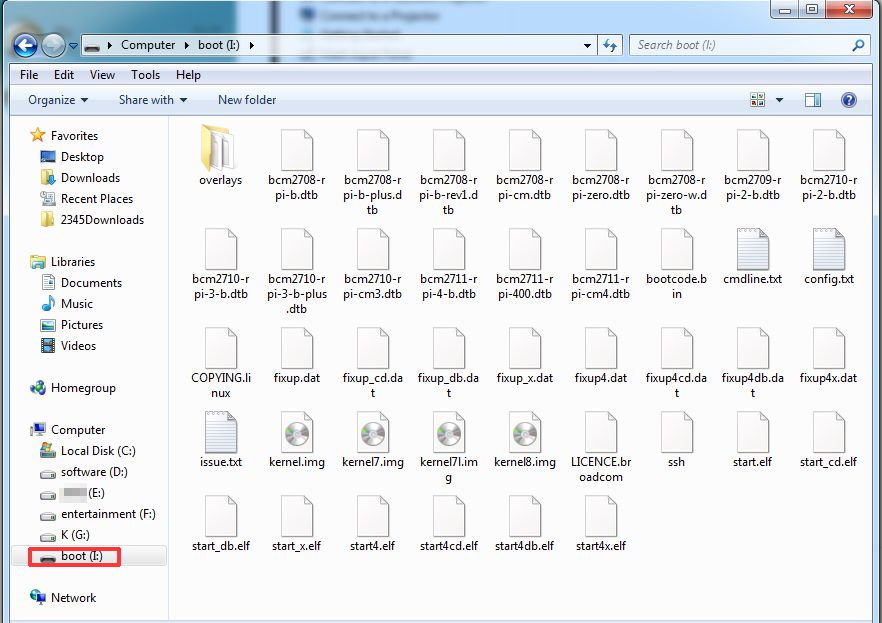
2. Abra esta tarjeta micro SD en su computadora
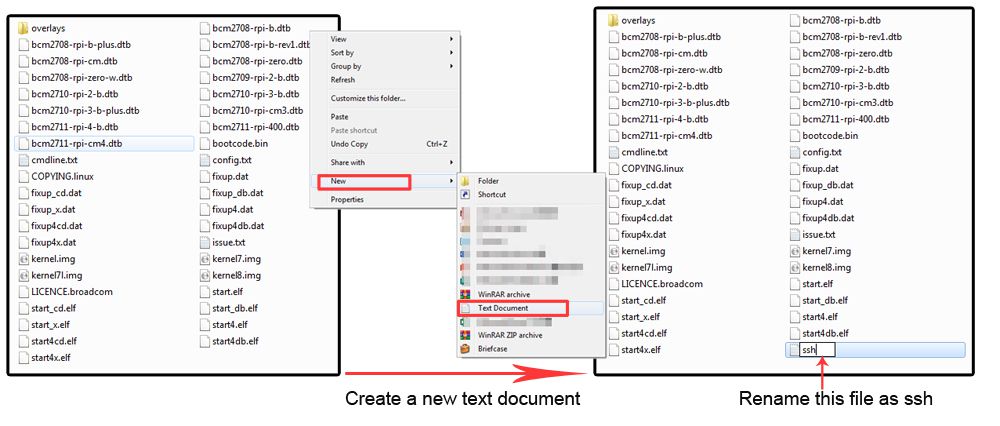
3. Crea un txt. y renombrado “ssh” en /boot/ para habilitarlo.
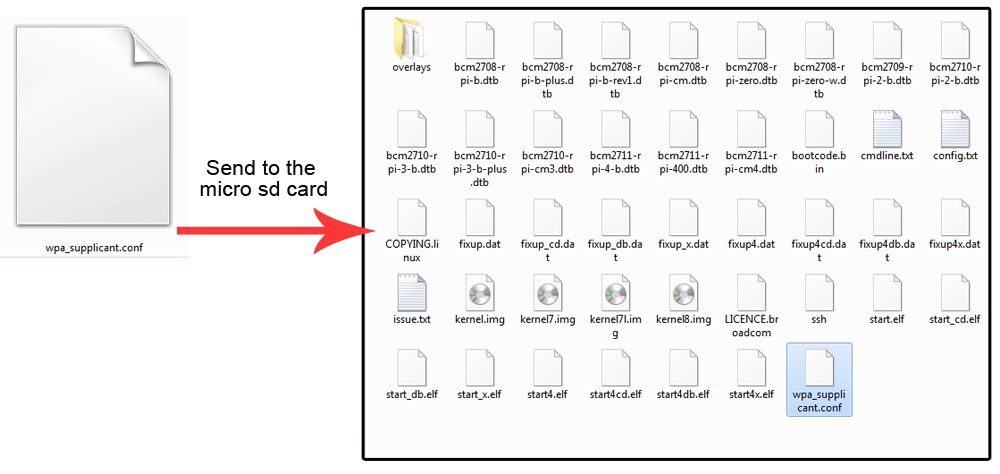
4. Descargue el archivo “wpa_supplicant.conf” y luego use Notepad ++ para abrir este archivo, y edite el SSID y PSK a su propio SSID wifi y contraseña y guarde este archivo:
ssid="Your wifi-A ssid"
psk="ssid password"
El contenido de “wpa_supplicant.conf” es el siguiente:
5.Envíe el archivo “wpa_supplicant.conf” desde su PC a la tarjeta micro SD
6. Conecte la tarjeta MicroSD a la Raspberry Pi y luego encienda la Raspberry Pi.
7. Inicie sesión en el enrutador WIFI y verifique la dirección IP de su Raspberry Pi (o puede usar alguna aplicación de escaneo de direcciones IP para escanear la dirección IP)
8. Utilice la herramienta ssh para controlar Raspberry Pi de forma remota
Observación: Para tres plataformas: Windows, Mac y Linux, podría ser un poco diferente hacer esto.
(1) Los usuarios de Linux y Mac pueden iniciar sesión fácilmente en la Raspberry Pi a través de ssh. En Linux o Mac, busque Terminal y ábralo.
Escriba ssh pi@IP dirección (ssh es la herramienta para el inicio de sesión remoto; pi es el nombre de usuario y, como su nombre indica, la dirección IP de su RPi) y luego presione Enter para confirmar. Por ejemplo:
ssh [email protected]
Si recibe un mensaje de que no se encuentra ssh, debe instalar una herramienta ssh como Ubuntu y Debian usted mismo:
sudo apt-get install ssh
(2) Para los usuarios de Windows, puede usar una herramienta ssh para iniciar sesión en Raspberry Pi de forma remota, como PuTTY.
Paso 1. Descargue PuTTY desde: https://www.chiark.greenend.org.uk/~sgtatham/putty/ e instale este exe. en tu PC con Windows
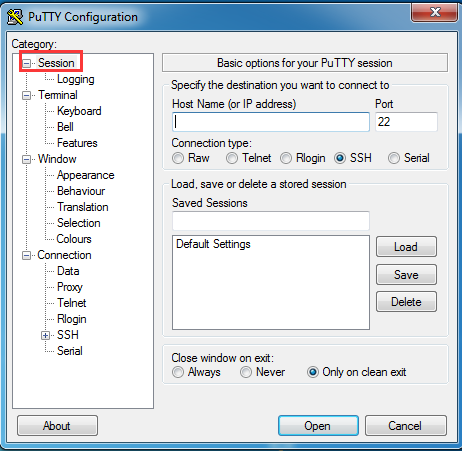
Paso 2. Abra PuTTY y haga clic en Sesión en la estructura similar a un árbol izquierdo (generalmente se contrae al iniciar PuTTY):
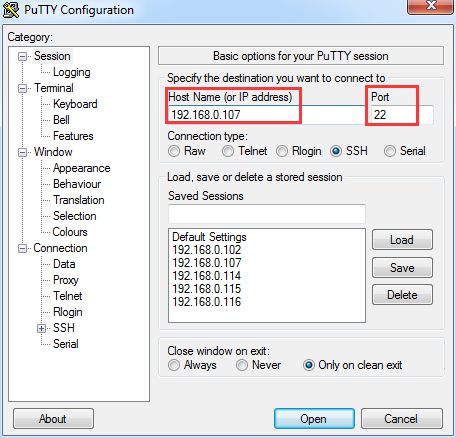
Paso 3. Ingrese la dirección IP que obtuvo en el cuadro de texto debajo de Nombre de host (o dirección IP) y 22 en Puerto (de forma predeterminada es 22), luego haga clic en abrir.
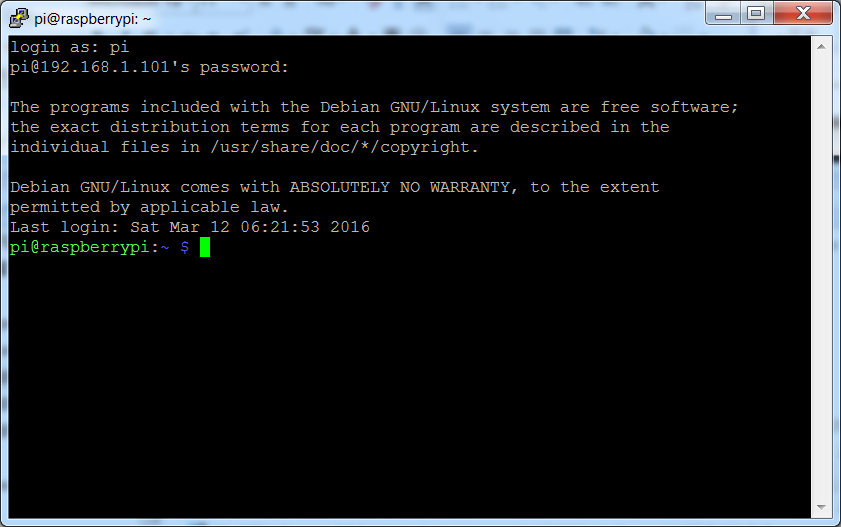
Paso 4. Tenga en cuenta que cuando inicie sesión por primera vez en la Raspberry Pi con la dirección IP, se le pedirá un recordatorio de seguridad. Simplemente haga clic en Sí. Cuando la ventana PuTTY solicite inicio de sesión como: escriba el nombre de usuario: pi y la contraseña: raspberry (la predeterminada, si no la ha cambiado). Nota: cuando está escribiendo la contraseña, la ventana no muestra nada simplemente nulo, pero de hecho está escribiendo cosas. Así que concéntrese en escribirlo correctamente y presione Enter. Después de iniciar sesión en el RPi correctamente, la ventana se mostrará de la siguiente manera:
Para otras plataformas, póngase en contacto con su proveedor.
Después de aprender cómo instalar Raspberry Pi OS y usar la consola de Raspberry Pi, puede seguir los siguientes pasos para probar el marco del automóvil robot en la lección1.
Nota: En nuestras lecciones de muestra, usamos PC con Windows como dispositivo de consola remota y PuTTY como herramienta ssh
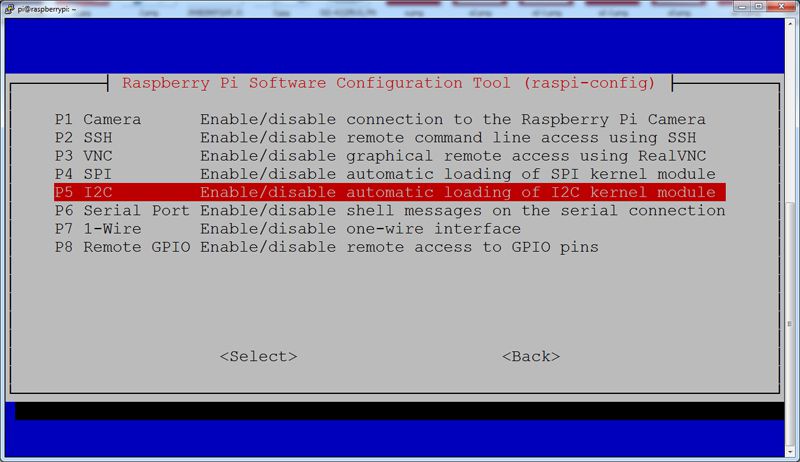
Paso 1: Encienda el automóvil y ejecute el siguiente comando y habilite el I2C (I2C es un protocolo que se utilizará para intercambiar datos con el dispositivo I2C)
sudo raspi-config
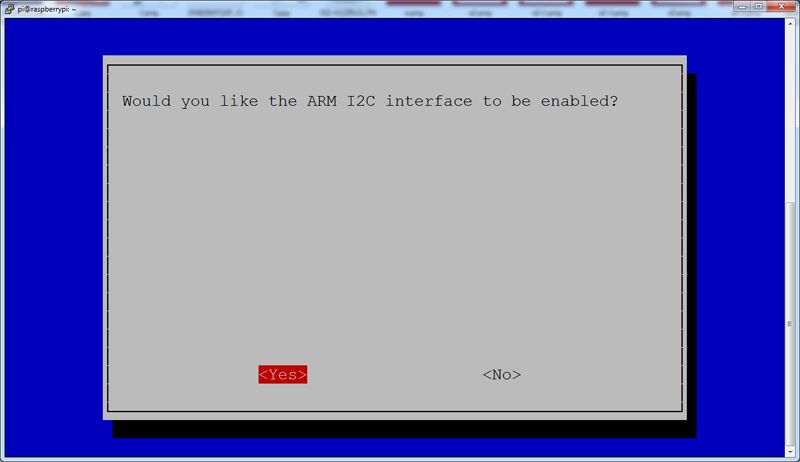
A continuación, seleccione Interface Options->I2C->Select->Yes->Finish
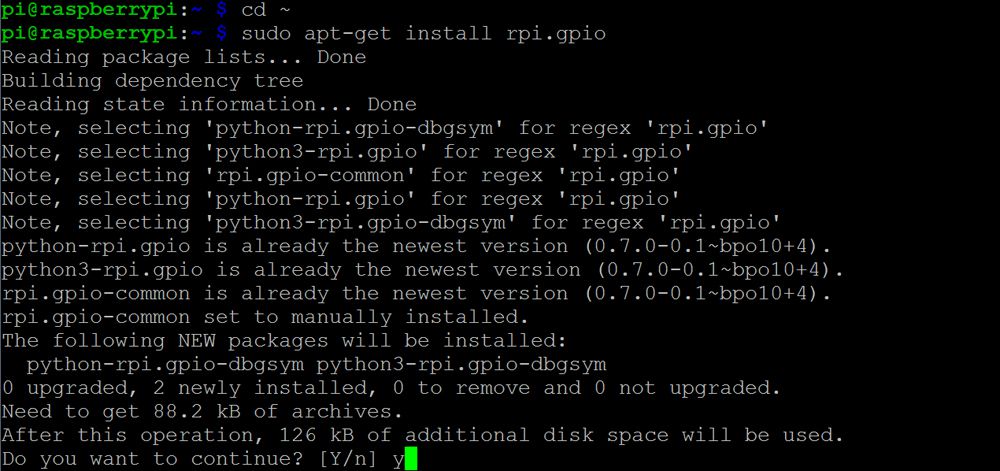
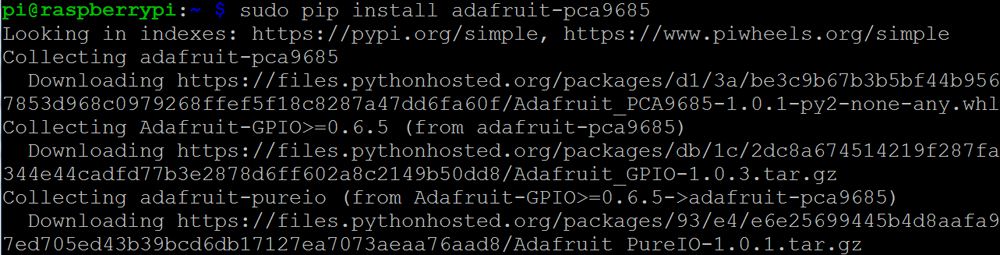
Paso 2: Instale GPIO y pca9685 PWM Library ejecutando los tres comandos siguientes:
cd ~ sudo apt-get install rpi.gpiosudo pip install adafruit-pca9685
Nota: suponemos que está utilizando el último sistema operativo Raspbian que viene con pip y Flask, si está utilizando otro sistema operativo, busque en Google la solución para instalar pip y Flask primero
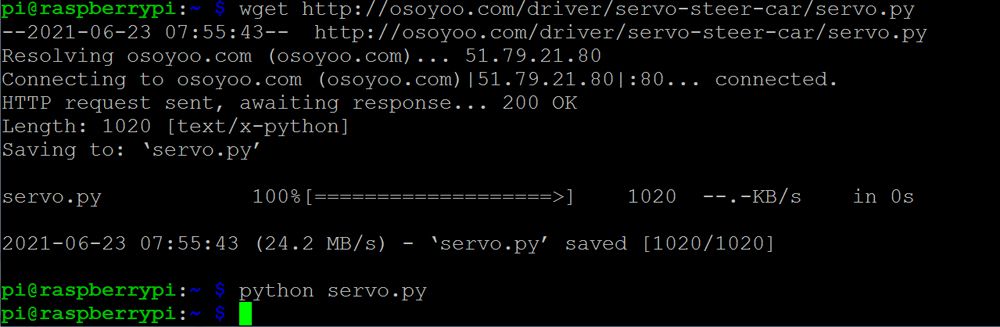
Paso 3: Ejecute los siguientes dos comandos para encontrar el valor frontal del servo:
Paso 4: Si su servo de dirección no mira hacia el centro en dirección frontal, entonces tiene dos opciones:
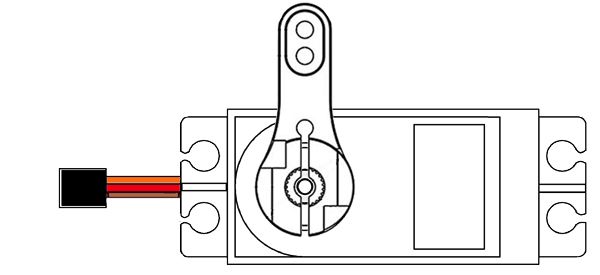
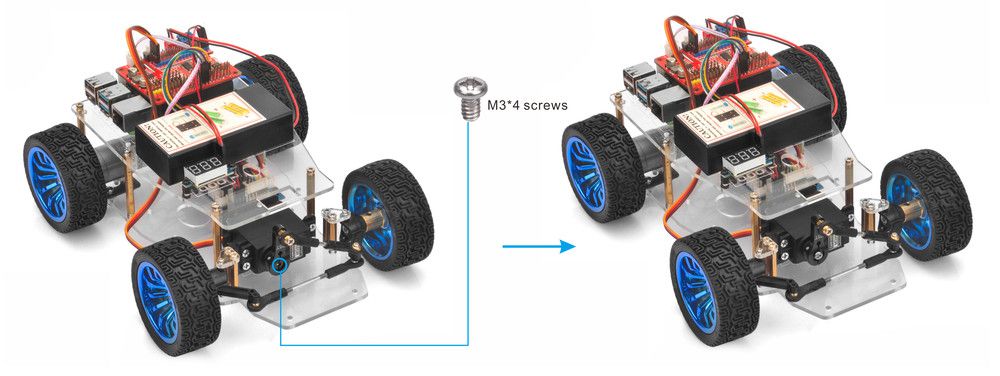
Opción 1 ) Apague la alimentación y retire la bocina del servomotor. Instale el brazo como la siguiente imagen. y luego instale tornillos M3 * 4 en el centro de la bocina para fijar la bocina.
Opción 2) Instale los tornillos M3 * 4 en el centro de la bocina para fijar la bocina e ingrese el siguiente comando en la terminal:
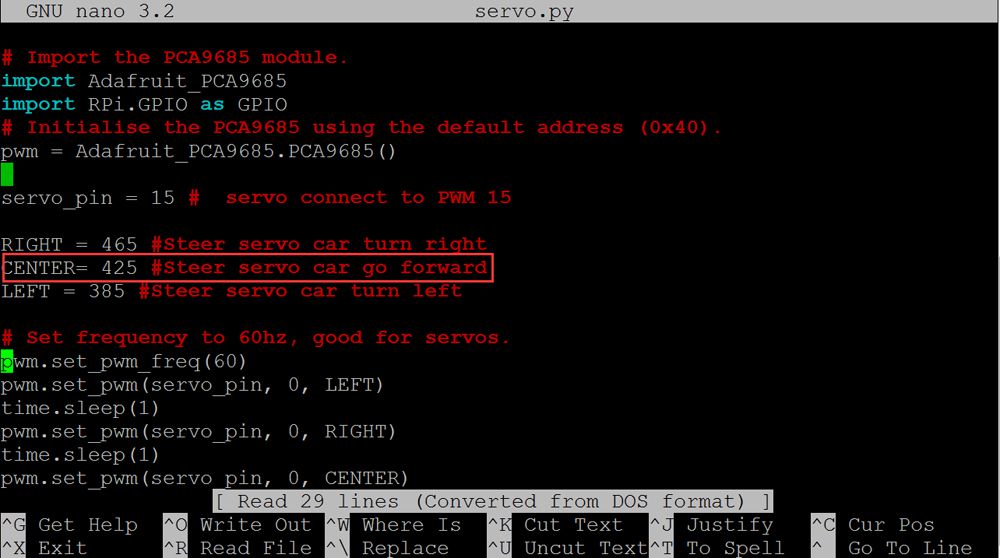
sudo nano servo.py
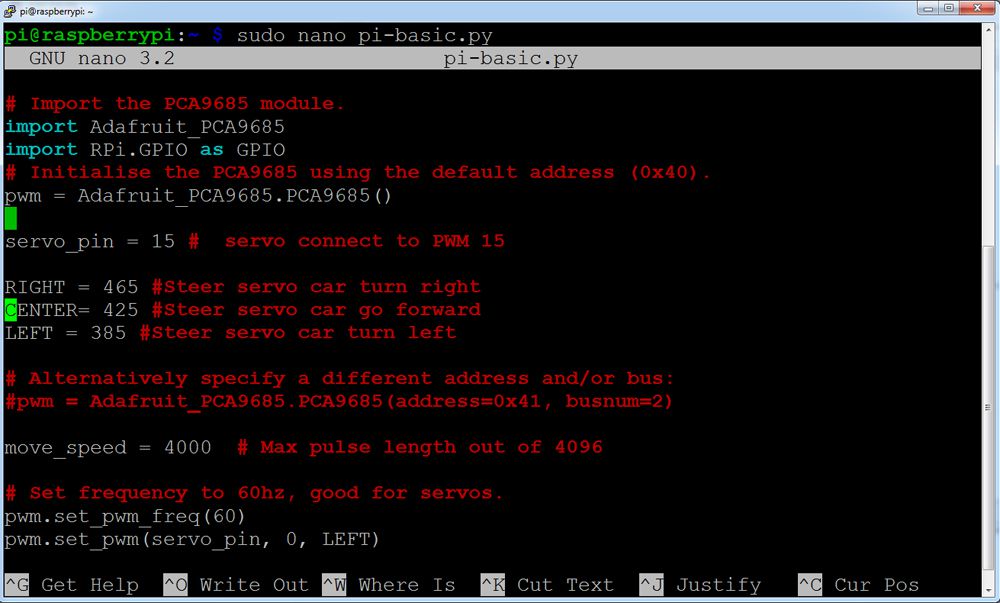
Puede cambiar el valor predeterminado de la línea 20
CENTER= 425 #Steer servo car go forward
Si sus volantes tienden a la izquierda, aumente el valor de 425 a 430, 435, 440 …
Si sus volantes tienden a la derecha, disminuya el valor de 425 a 420, 415, 410 …
Luego haga clic en “ctrl” + “x”, y luego en Y para guardar este archivo y ejecutar el comando: python servo.py nuevamente. Repita estos pasos hasta que sus volantes finalmente miren hacia adelante, y escriba este valor para cambiar el código de lección2,3,4,5,6 y hacer que el servo de dirección siempre mire hacia adelante en el valor
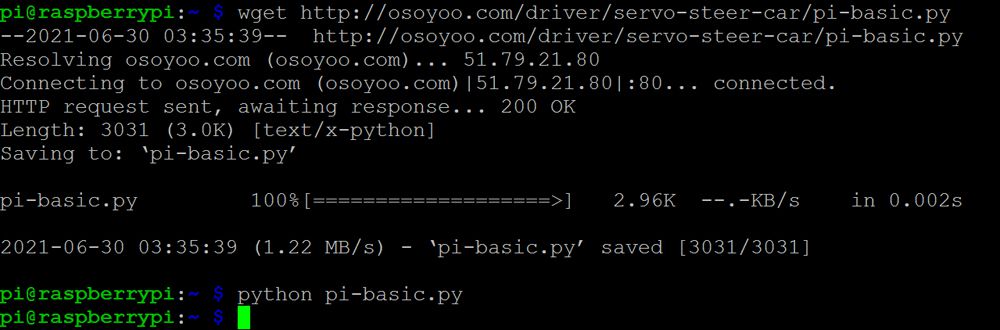
predeterminado FRONTAL 1. Encienda el automóvil y escriba los siguientes dos comandos en la terminal:
2. Después de que la pitón anterior se esté ejecutando, sus motores se moverán hacia adelante y luego hacia atrás, y girarán a la izquierda para luego girar a la derecha, luego volver a la derecha y finalmente volver a la izquierda.
3. Ejecute el siguiente comando para cambiar el valor predeterminado 425 en la línea 20 como el valor FRONT. Si alinea la dirección de la rueda manualmente, omita este paso.
sudo nano pi-basic.py
Puede descargar el código Python de muestra de https://osoyoo.com/driver/p3-car/v3car-basic.py y leerlo a través de Notepad ++. Si tiene algunos conocimientos básicos de python, puede comprender fácilmente cómo personalizar el código para su propia aplicación.

















 3. Si
3. Si 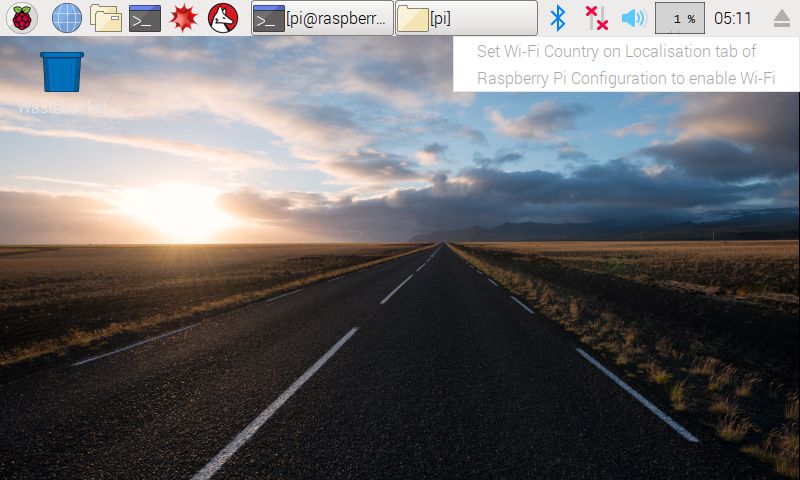



 Después de aprender cómo instalar Raspberry Pi OS y usar la consola de Raspberry Pi, puede seguir los siguientes pasos para probar el marco del automóvil robot en la lección1.
Después de aprender cómo instalar Raspberry Pi OS y usar la consola de Raspberry Pi, puede seguir los siguientes pasos para probar el marco del automóvil robot en la lección1.