Dans ce tutoriel, nous allons simplement vous dire comment installer Raspberry Pi OS pour le Raspberry pi et comment utiliser la console pour contrôler raspberry pi. Nous utiliserons OSOYOO Servo Steer Smart Car pour Raspberry Pi pour faire quelques mouvements simples. Une fois l’installation de la voiture terminée, il est très important de tester l’installation et l’exemple de code. Si vous avez réussi le mouvement de test de cette leçon, cela signifie que Raspberry pi, les moteurs, la batterie, la carte modèle X, le servomoteur et les connexions de fil entre ces pièces fonctionnent bien, et vous pouvez passer à d’autres exemples de leçons
Si vous ne terminez pas le châssis de la voiture, veuillez consulter la leçon 1
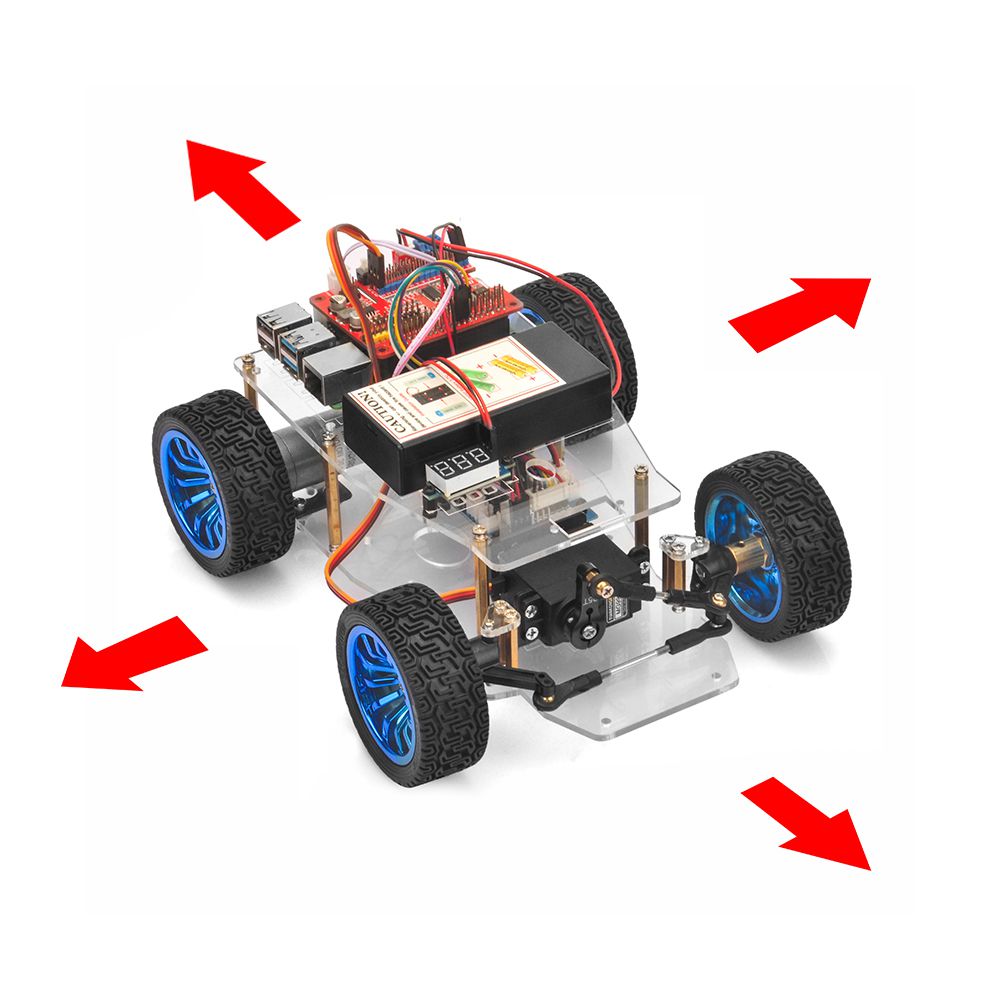
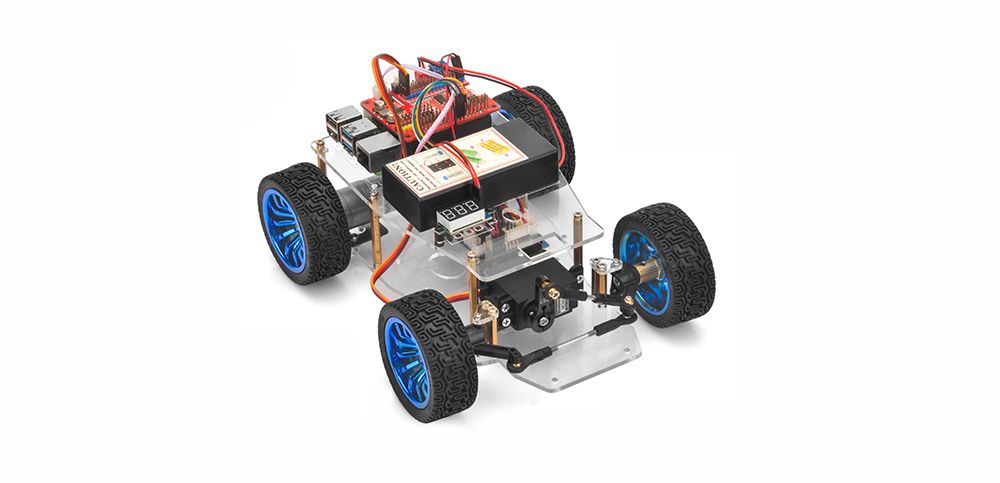
Servo Steer Smart Car pour Raspberry Pi (avec carte raspberry pi) x1
Carte Micro SD (plus de 8 Go) x1
Lecteur de carte Micro SD x1
OSOYOO 5 pouces DSI écran tactile pour Raspberry Pi x1
Système d’exploitation pour cette voiture robot:Raspberry Pi Legacy (buster) . Veuillez noter que cet exemple de projets de voiture robot ne prend PAS en charge le système d’exploitation Raspberry Pi New Bullseye. Donc, ne faites pas d’erreur sur le téléchargement du système d’exploitation.
Voici les étapes pour installer le système d’exploitation Raspberry Pi Legacy : Étape 1: Téléchargez le système d’exploitation Raspberry Pi Buster (OS) et gravez-le sur la carte SD (ignorez cette étape si votre carte SD a préinstallé Rpi Buster OS Image).
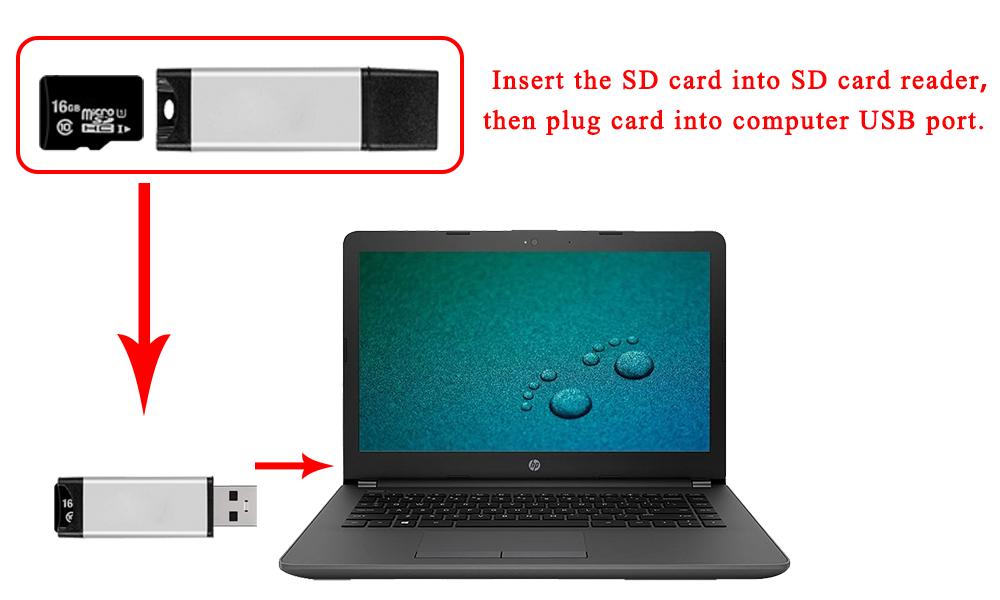
Préparez une nouvelle carte Micro SD (plus de 8 Go) et insérez-la dans un lecteur de carte micro SD USB, puis connectez le lecteur de carte micro SD USB à votre PC.
A. Utilisation directe de la console
Remarque : Un moniteur d’écran est nécessaire lorsque vous utilisez directement la console.
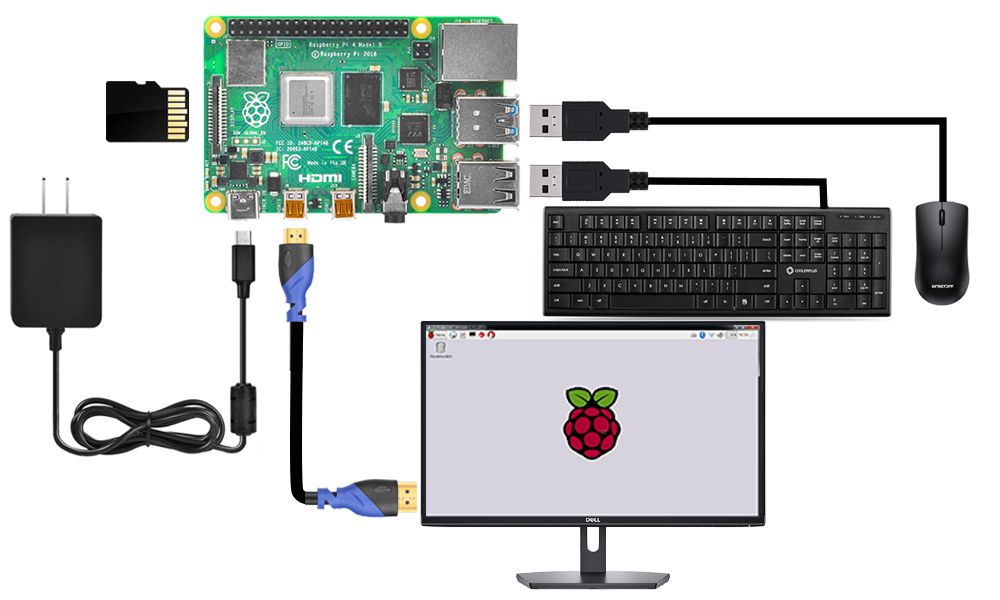
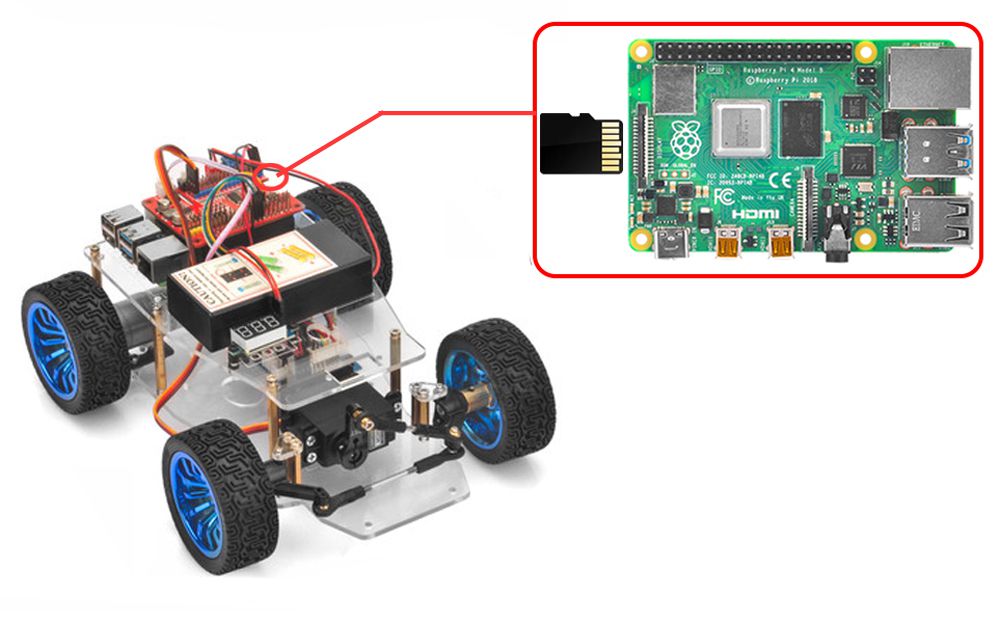
1. Connectez le Raspberry Pi à votre moniteur HDMI ou à votre téléviseur. Insérez un clavier et une souris dans les ports USB du Raspberry Pi. Insérez la carte SD dans la fente de votre Raspberry Pi comme suit:
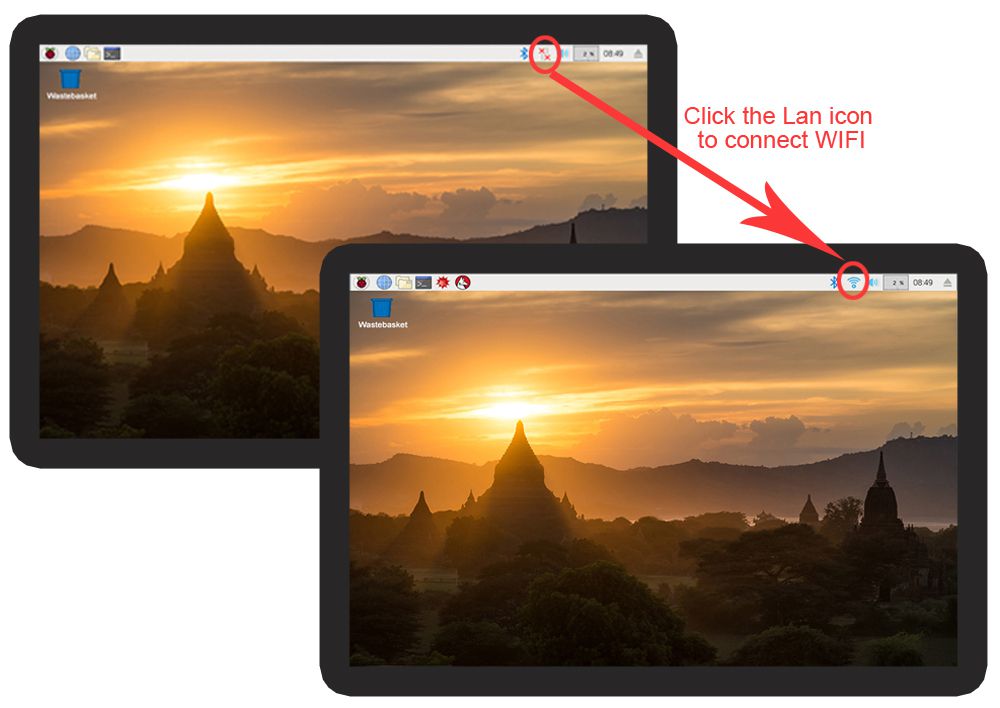
2. Veuillez cliquer sur l’icône Lan en haut à droite, sélectionnez votre SSID WIFI et entrez le mot de passe de votre wifi pour connecter le hotspot wifi. Ensuite, vous pouvez voir la console en plein écran.
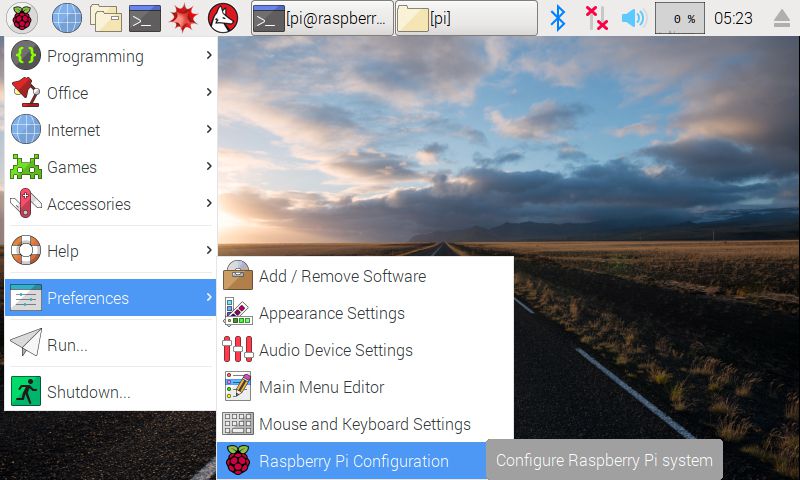
3. Si vous déplacez sur l’icône LAN et obtenez l’avis suivant:
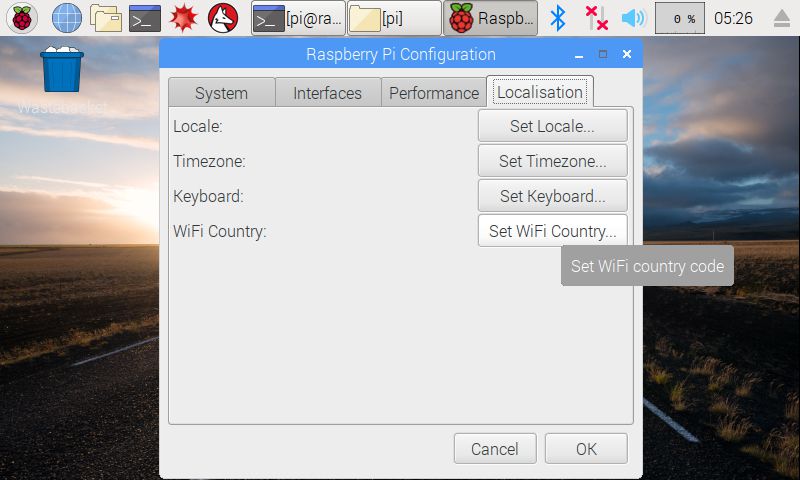
4. Veuillez cliquer sur configurer la localisation WIFI comme suit:
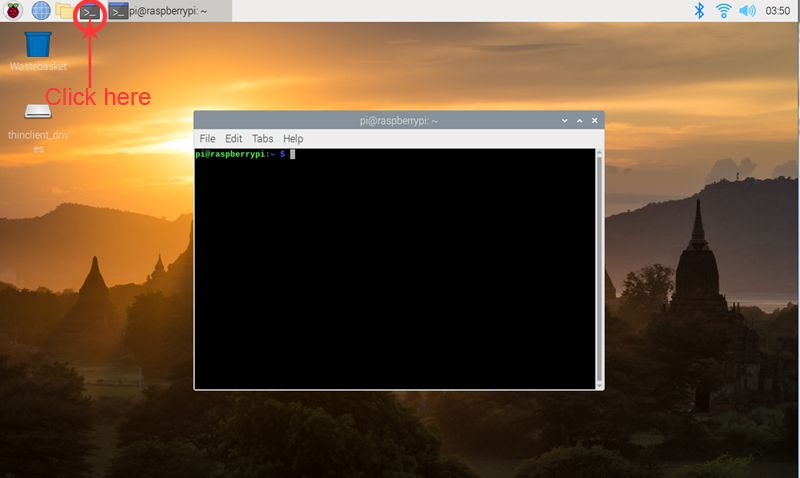
5. Cliquez sur l’icône de Terminal à l’écran, ou appuyez simultanément sur CTRL + ALT + T, puis un terminal apparaîtra comme suit:
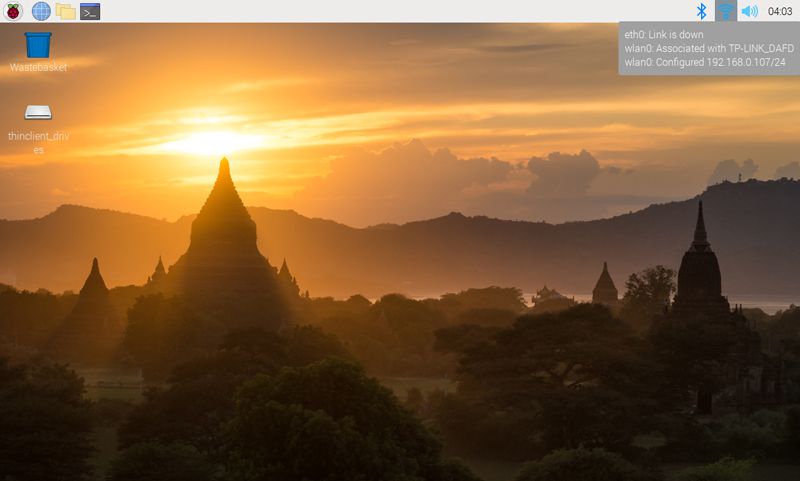
6. Découvrez l’adresse IP du RPi. Méthode A: Connectez votre Pi au moniteur et à la souris, cliquez sur l’icône LAN ou WIFI pour obtenir l’adresse IP comme photo suivante
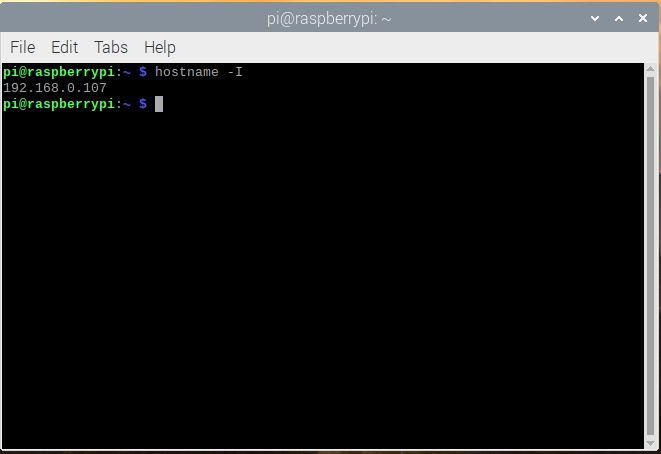
Méthode B: vous pouvez également trouver l’adresse IP en tapant la commande terminal:
hostname -I
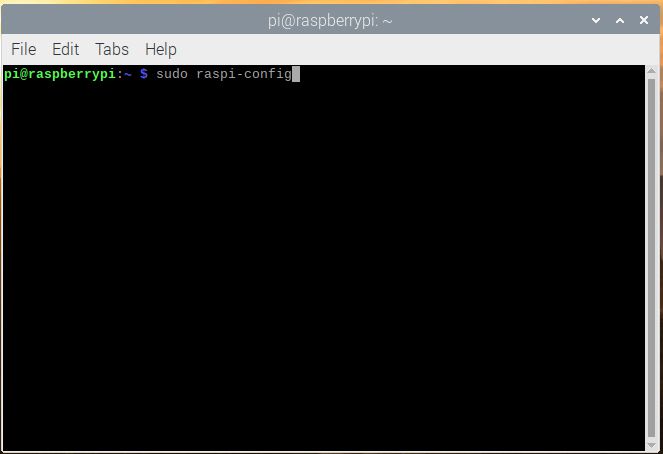
7. Activer SSH
Commande de saisie du terminal :
sudo raspi-config
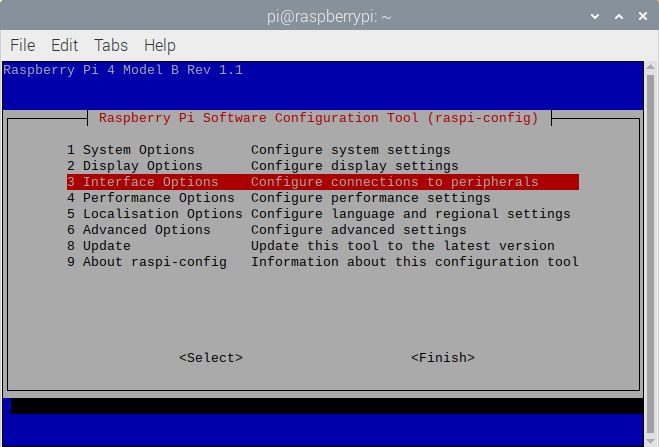
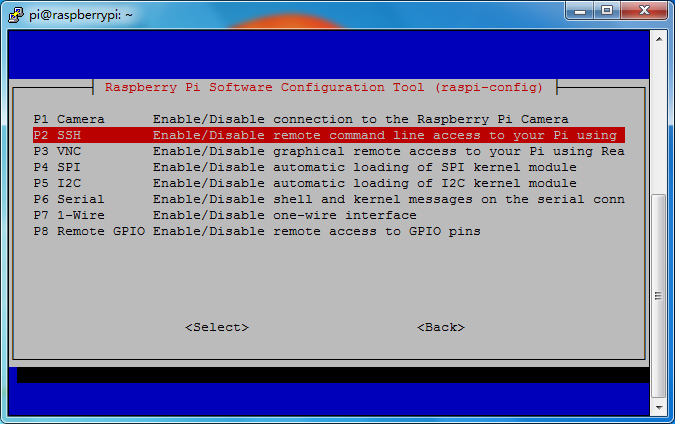
Allez dans le menu de configuration, allez dans Interface Interface Options ->SSH -> Select ->Yes -> Finish (Remarque: veuillez utiliser les « flèches » du clavierpour afficher le curseur où vous voulez aller et appuyez sur « Entrée » pour confirmer la sélection)
B. Utilisation de la console à distance
Remarque: Pour la version 2016-11-25 ou supérieure, SSH (un protocole sécurisant la session de connexion à distance et un autre service réseau) est désactivé par défaut. Par conséquent, lorsque vous devez vous connecter à distance, vous devez d’abord activer ssh.
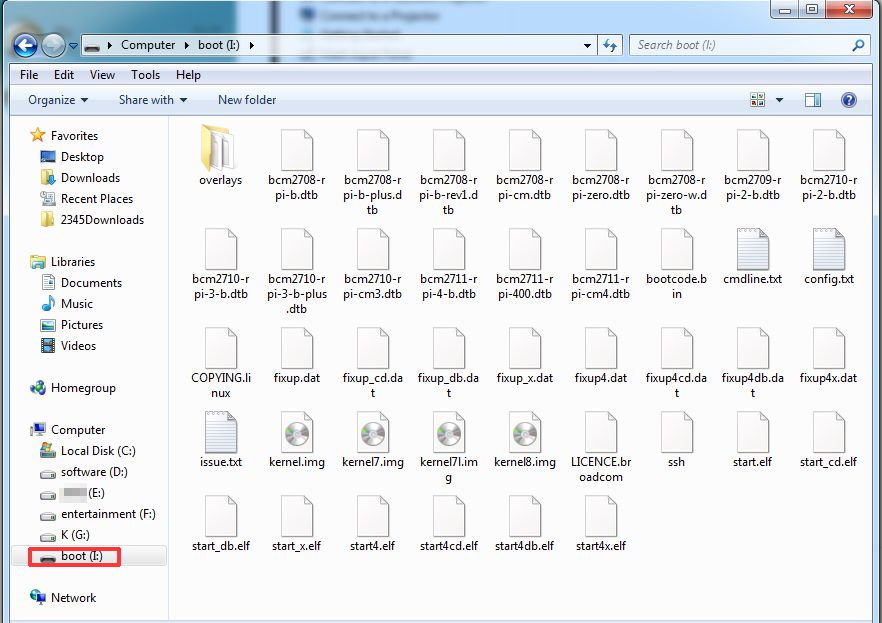
1. Insérez la carte Micro SD qui est gravée avec Raspberry Pi OS dans le lecteur de carte micro SD USB, et connectez le lecteur de carte micro SD USB à votre PC.
2. Ouvrez cette carte micro SD dans votre ordinateur
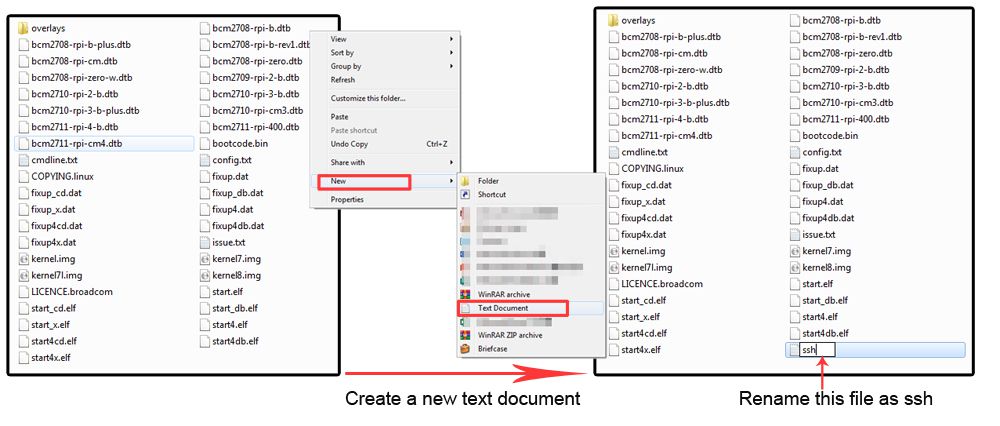
3. Créez un txt. et renommé « ssh » sous /boot/ pour l’activer.
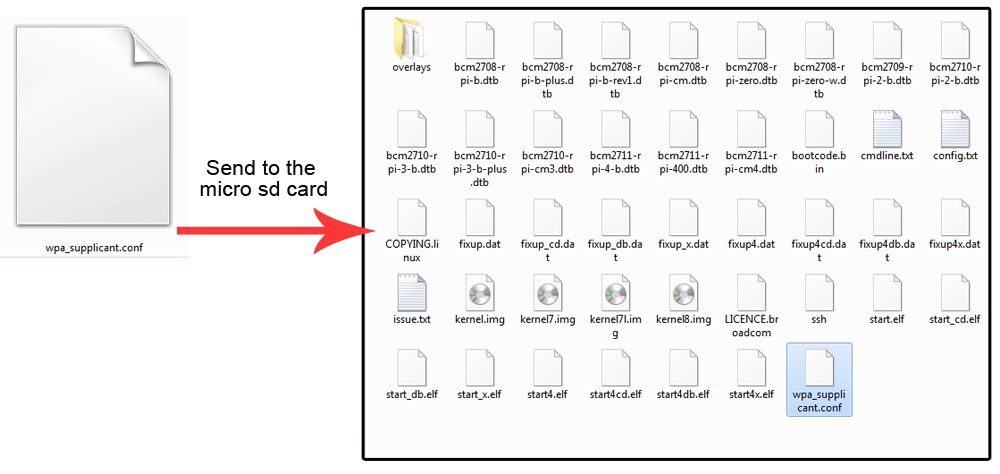
4. Téléchargez le fichier « wpa_supplicant.conf », puis utilisez Notepad ++ pour ouvrir ce fichier, et éditez le SSID et le PSK à votre propre SSID wifi et mot de passe et enregistrez ce fichier:
5.Envoyez le fichier « wpa_supplicant.conf » de votre PC à la carte micro SD
6. Branchez la carte MicroSD sur le Raspberry Pi, puis allumez le Raspberry Pi.
7. Connectez-vous au routeur WIFI et vérifiez l’adresse IP de votre Raspberry Pi (ou vous pouvez utiliser une application de numérisation d’adresse IP pour analyser l’adresse IP)
8. Utilisez l’outil ssh pour contrôler Raspberry Pi à distance
Remarque: Pour trois plates-formes: Windows, Mac et Linux, cela pourrait être un peu différent de le faire.
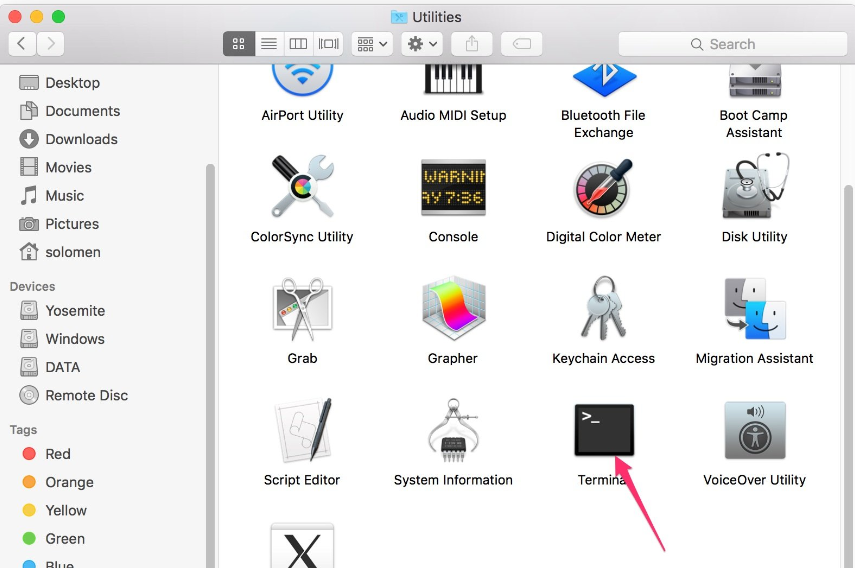
(1) Les utilisateurs Linux et Mac peuvent facilement se connecter au Raspberry Pi via ssh. Sous Linux ou Mac, recherchez Terminal et ouvrez-le.
Tapez ssh pi@IP adresse (ssh est l’outil de connexion à distance; pi est le nom d’utilisateur et, comme son nom l’indique, l’adresse IP de votre RPi), puis appuyez sur Entrée pour confirmer. Par exemple :
ssh [email protected]
Si vous obtenez une invite indiquant qu’aucun ssh n’est trouvé, vous devez installer un outil ssh comme Ubuntu et Debian par vous-même:
sudo apt-get install ssh
(2) Pour les utilisateurs de Windows, vous pouvez utiliser un outil ssh pour vous connecter à Raspberry Pi à distance, comme PuTTY.
Étape 1. Téléchargez PuTTY à partir de : https://www.chiark.greenend.org.uk/~sgtatham/putty/ et installez ce fichier exe. sur votre PC Windows
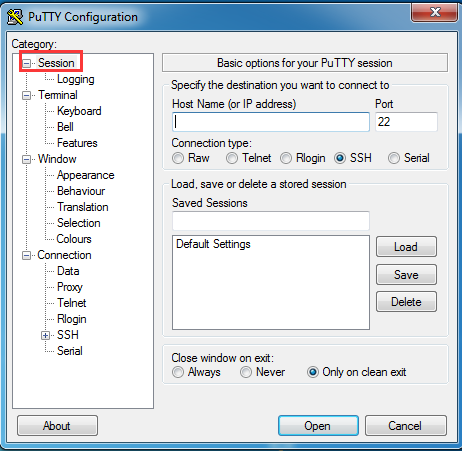
Étape 2. Ouvrez PuTTY et cliquez sur Session sur la structure arborescente de gauche (généralement réduite au démarrage de PuTTY):
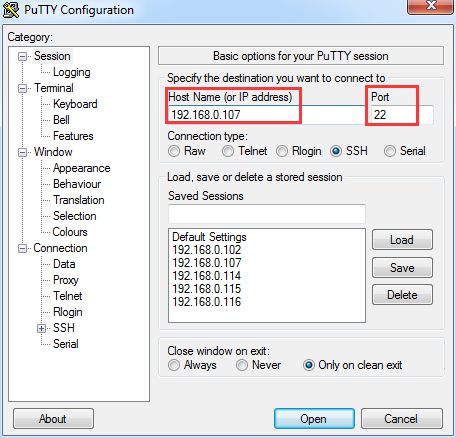
Étape 3. Entrez l’adresse IP que vous avez obtenue dans la zone de texte sous Nom d’hôte (ou adresse IP) et 22 sous Port (par défaut, c’est 22), puis cliquez sur Ouvrir.
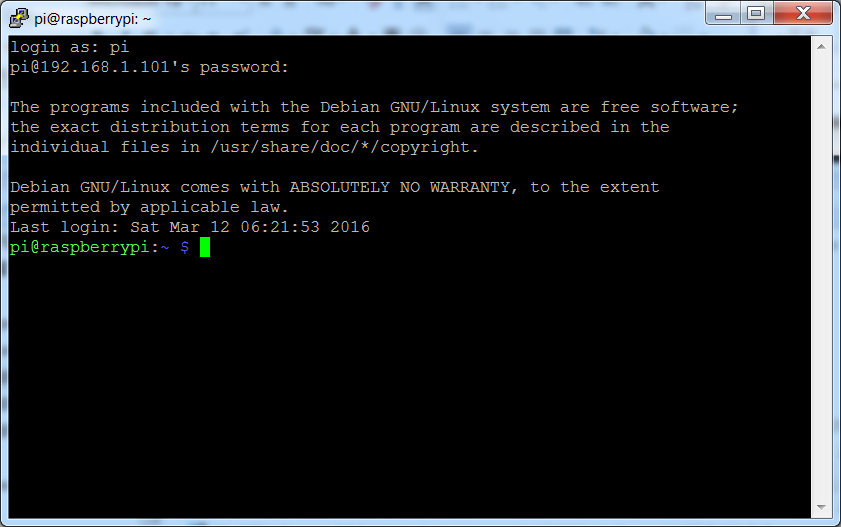
Étape 4. Notez que lorsque vous vous connectez pour la première fois au Raspberry Pi avec l’adresse IP, vous serez invité avec un rappel de sécurité. Cliquez simplement sur Oui. Lorsque la fenêtre PuTTY vous invite à vous connecter en tant que: tapez le nom d’utilisateur: pi et le mot de passe: raspberry (celui par défaut, si vous ne l’avez pas modifié). Remarque: lorsque vous tapez le mot de passe, la fenêtre n’affiche rien de null, mais vous tapez en fait des choses. Alors concentrez-vous simplement sur la saisie correcte et appuyez sur Entrée. Une fois que vous vous êtes connecté au RPi avec succès, la fenêtre s’affiche comme suit :
Pour les autres plateformes, veuillez contacter votre fournisseur.
Après avoir appris à installer Raspberry Pi OS et à utiliser la console de Raspberry Pi, vous pouvez suivre les étapes suivantes pour tester le cadre de la voiture robot dans leçon1.
Remarque: Dans nos exemples de leçons, nous utilisons Windows PC comme périphérique de console distante et PuTTY comme outil ssh
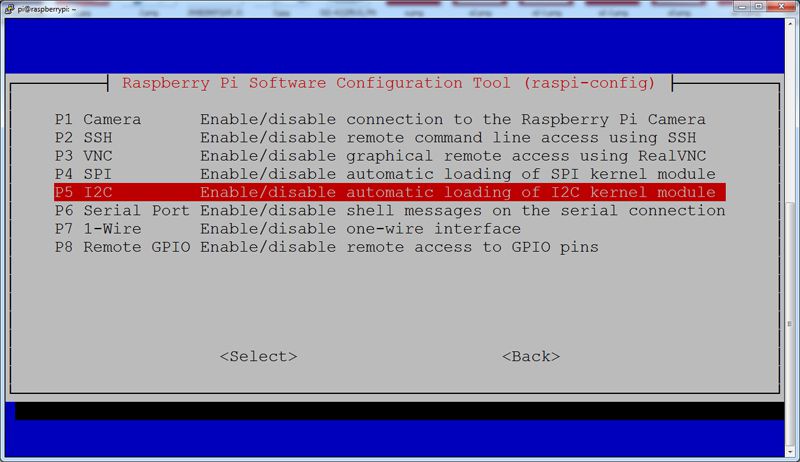
Étape 1: Alimentez la voiture et exécutez la commande suivante et activez l’I2C (I2C est un protocole qui sera utilisé pour échanger des données avec le périphérique I2C)
sudo raspi-config
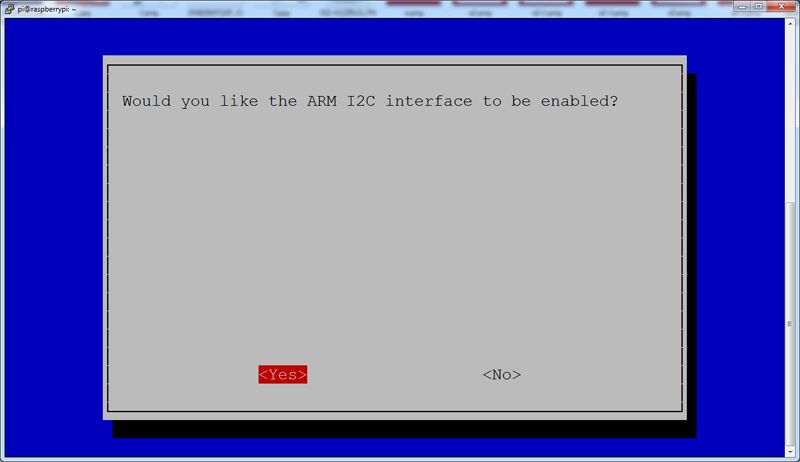
Sélectionnez ensuite Interface Options->I2C->Select->Yes->Finish.
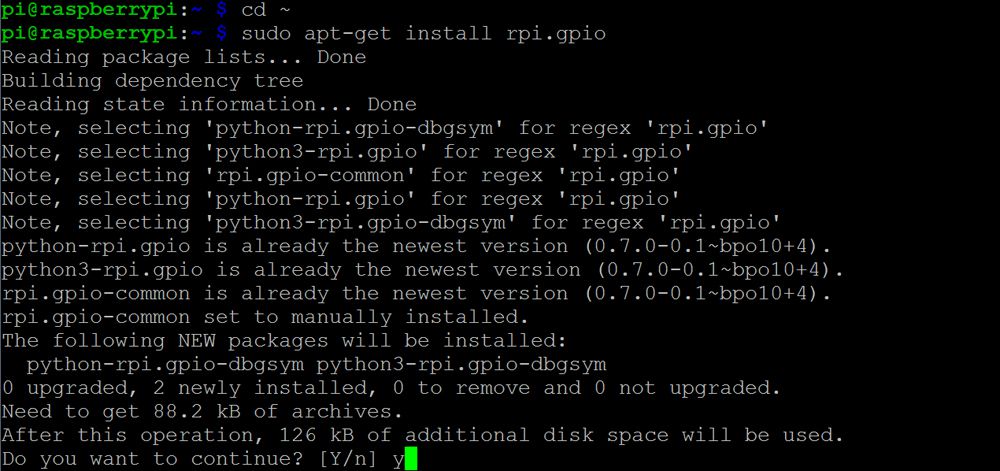
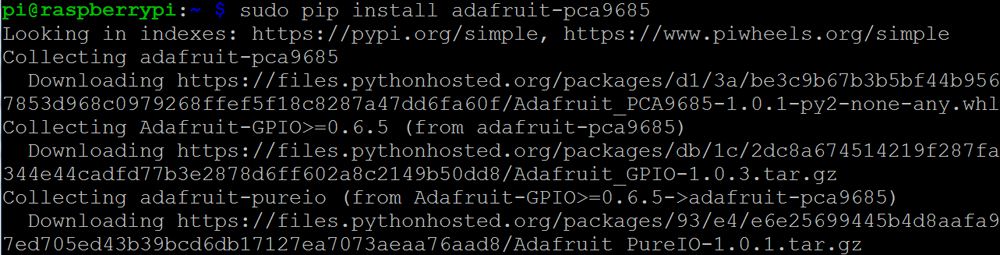
Étape 2 : Installez GPIO et la bibliothèque PWM pca9685 en exécutant les trois commandes suivantes :
cd ~ sudo apt-get install rpi.gpiosudo pip install adafruit-pca9685
Remarque: nous supposons que vous utilisez le dernier système d’exploitation Raspbian fourni avec pip et Flask, si vous utilisez un autre système d’exploitation, veuillez d’abord installer pip et Flask
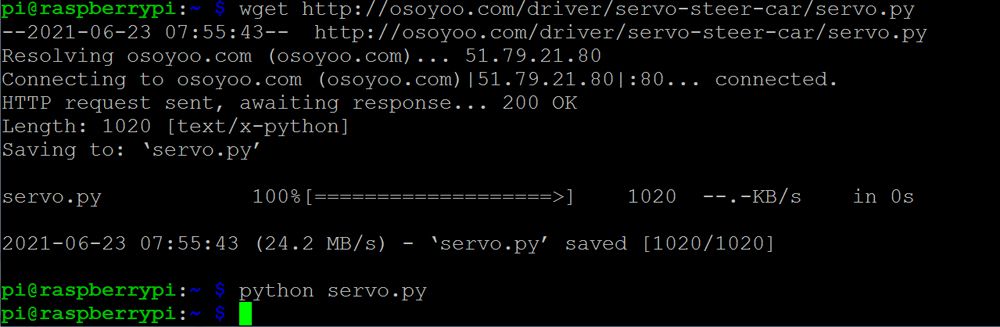
Étape 3 : Exécutez les deux commandes suivantes pour trouver la valeur avant du servo :
Étape 4 : Si votre servo de direction n’est pas orienté vers le centre vers l’avant, vous avez deux options :
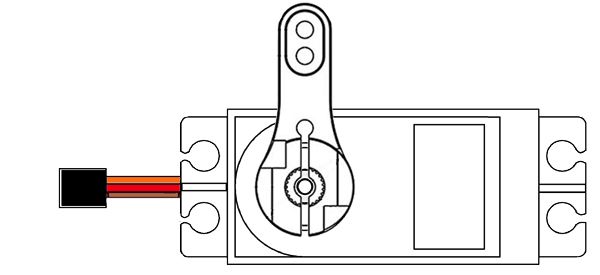
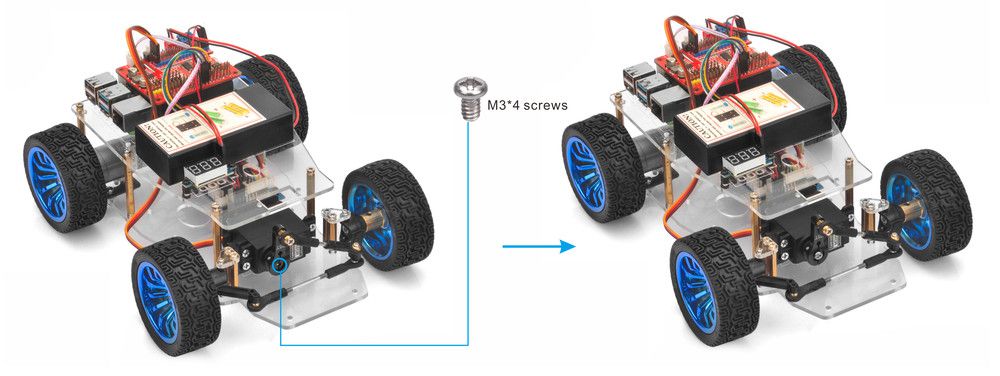
Option 1 ) Coupez l’alimentation et retirez le klaxon du servomoteur. Installez le bras comme image suivante. puis installez des vis M3 * 4 au milieu du klaxon pour fixer le klaxon.
Option 2) Installez des vis M3 * 4 au milieu du klaxon pour fixer le klaxon et entrez la commande suivante dans le terminal:
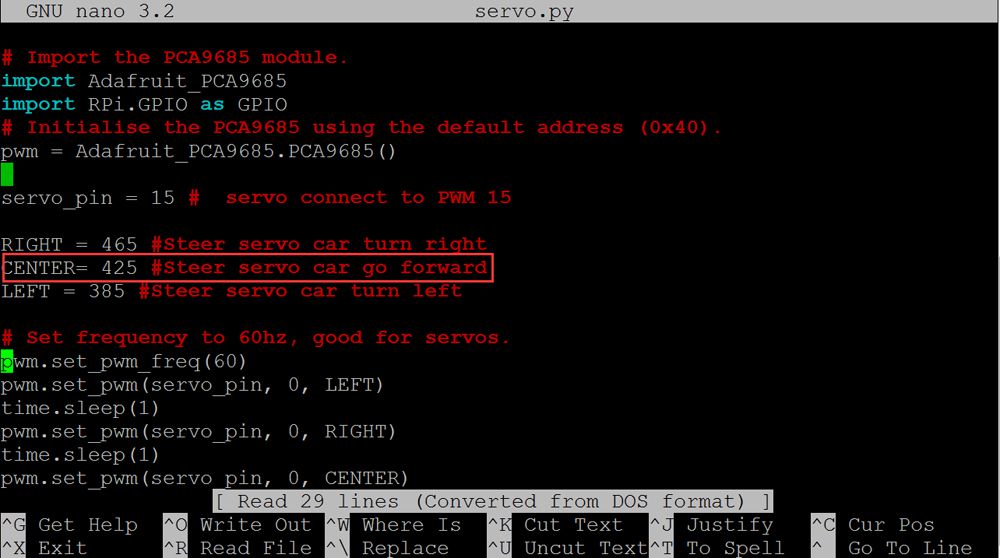
sudo nano servo.py
Vous pouvez modifier la valeur par défaut de la ligne 20
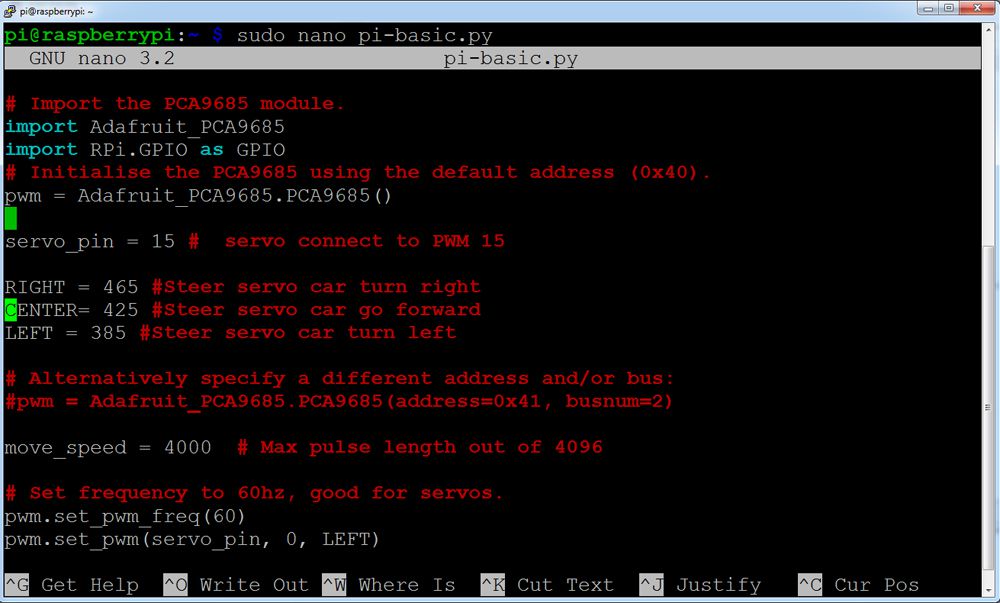
CENTER= 425 #Steer servo car go forward
Si vos volants ont tendance à gauche, augmentez la valeur de 425 à 430, 435, 440…
Si vos volants ont tendance à être droits, diminuez la valeur de 425 à 420, 415, 410…
Cliquez ensuite sur « ctrl » + « x », puis sur Y pour enregistrer ce fichier et exécuter à nouveau la commande: python servo.py. Répétez ces étapes jusqu’à ce que vos volants soient enfin orientés vers l’avant et notez cette valeur pour modifier le code de la leçon2,3,4,5,6 et rendre le servo de direction toujours orienté vers l’avant à la valeur
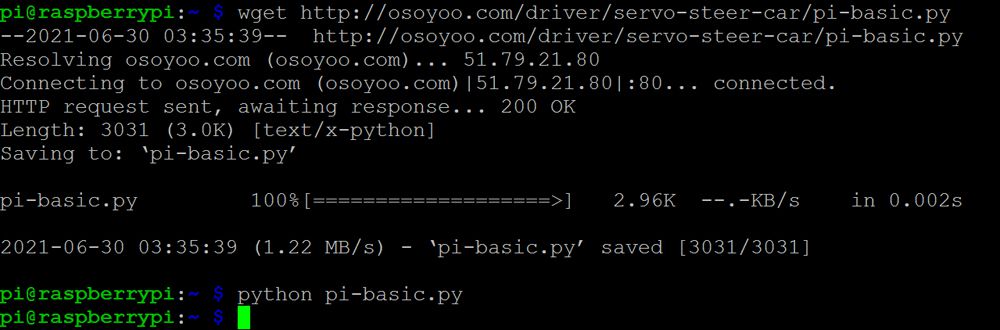
FRONT par défaut 1. Alimentez la voiture et tapez les deux commandes suivantes dans le terminal:
2. Après que python ci-dessus est en cours d’exécution, vos moteurs se déplaceront vers l’avant, puis reculeront, et tourneront à gauche pour ensuite tourner à droite, puis de nouveau à droite et enfin de nouveau à gauche.
3. Veuillez exécuter la commande suivante pour remplacer la valeur par défaut 425 de la ligne 20 par la valeur FRONT. Si vous alignez manuellement la direction de la roue, veuillez ignorer cette étape.
sudo nano pi-basic.py
Vous pouvez télécharger l’exemple de code python à partir de https://osoyoo.com/driver/p3-car/v3car-basic.py et le lire via Notepad ++. Si vous avez des connaissances de base en python, vous pouvez facilement comprendre comment personnaliser le code pour votre propre application.


















 3. Si vous
3. Si vous 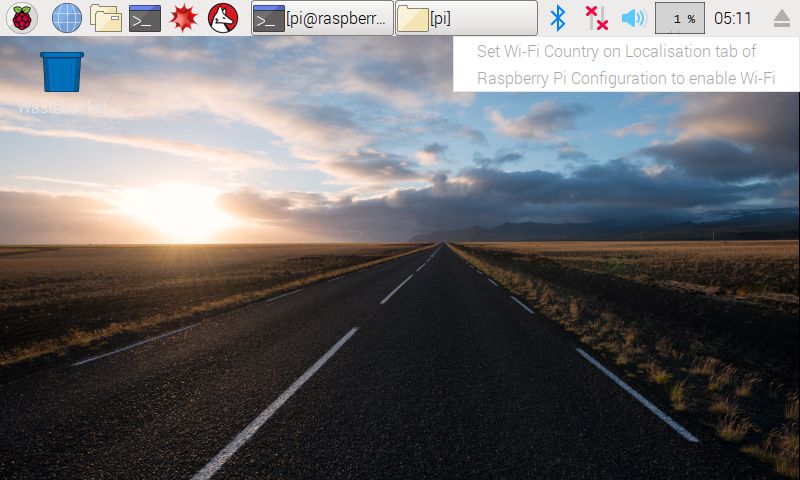



 Après avoir appris à installer Raspberry Pi OS et à utiliser la console de Raspberry Pi, vous pouvez suivre les étapes suivantes pour tester le cadre de la voiture robot dans leçon1.
Après avoir appris à installer Raspberry Pi OS et à utiliser la console de Raspberry Pi, vous pouvez suivre les étapes suivantes pour tester le cadre de la voiture robot dans leçon1.