In dieser Lektion erklären wir Dir die Installation des Raspberry Pi OS für den Raspberry Pi und die Nutzung eines Terminalprogramms zur Steuerung des Raspberry Pi. Wir werden mit dem OSOYOO Servo Steer Smart Car für Raspberry Pi einige einfache Bewegungen auszuführen. Nachdem das Auto aufgebaut wurde ist es sehr wichtig, Aufbau und Beispiel Code zu testen. Wenn das Auto zum Schluss der Lektion die programmierten Testbewegungen durchführt heißt das, Raspberry Pi, Motoren, Batterie, Model X Board, Servo-Motor und Kabelverbindungen funktionieren alle richtig und Du kannst zu einer neuen Lektion wechseln.
Wenn Du den Fahrzeugaufbau noch nicht abgeschlossen hast, folge bitte dem Tutorial in Lektion 1
Bitte sieh Dir neben dem Tutorial -Text auf jeden Fall auch das Erklär-Video an – viele kleine Tipps und Tricks kannst Du Dir dort einfach abschauen.
Servo Steer Smart Car für Raspberry Pi (mit Raspberry Pi Board)
Micro SD Card (größer als 8GB)
Micro SD Card Reader (USB Stick)
HDMI Monitor oder TV (für direkten Terminalbetrieb)
Betriebssystem für dieses Roboterauto:Raspberry Pi Legacy(buster). Bitte beachte, dass die Beispielprojekte für dieses Roboterauto NICHT mit dem neuen Raspberry Pi Bullseye OS kompatibel sind. Installiere also bitte nicht das falsche OS.
Sieh hier bitte die Beschreibung zur Installation des Raspberry Pi Legacy OS:
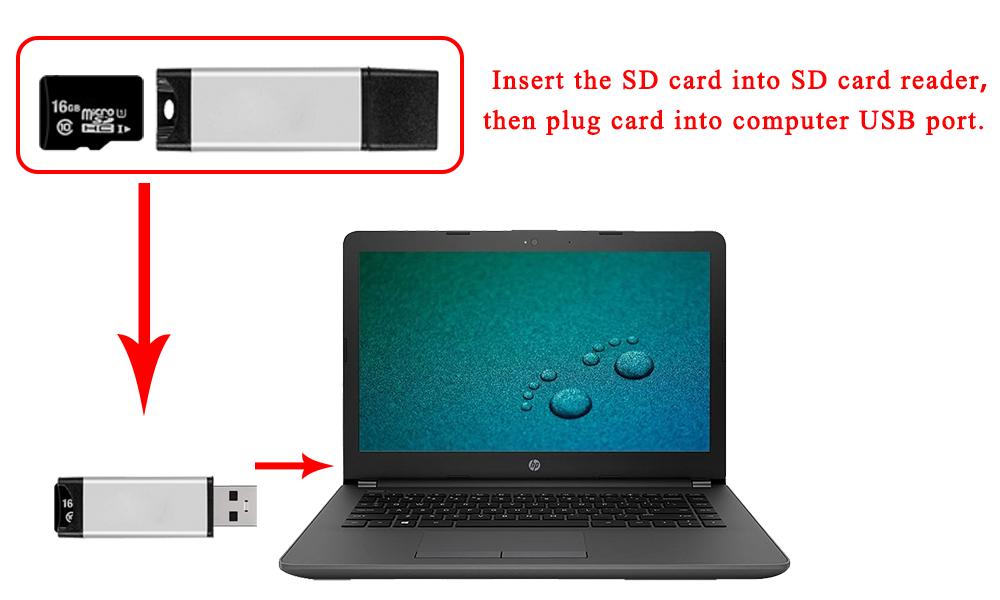
Schritt 1: Lade das Raspberry Pi Buster Betriebssystem (OS) und speichere es auf einer SD Card. (Überspringe den Punkt wenn Deine SD Card bereits ein vorinstalliertes RPi Buster OS Image enthält).
Hinweis: Für den direkten Terminalbetrieb ist ein Bildschirm erforderlich.
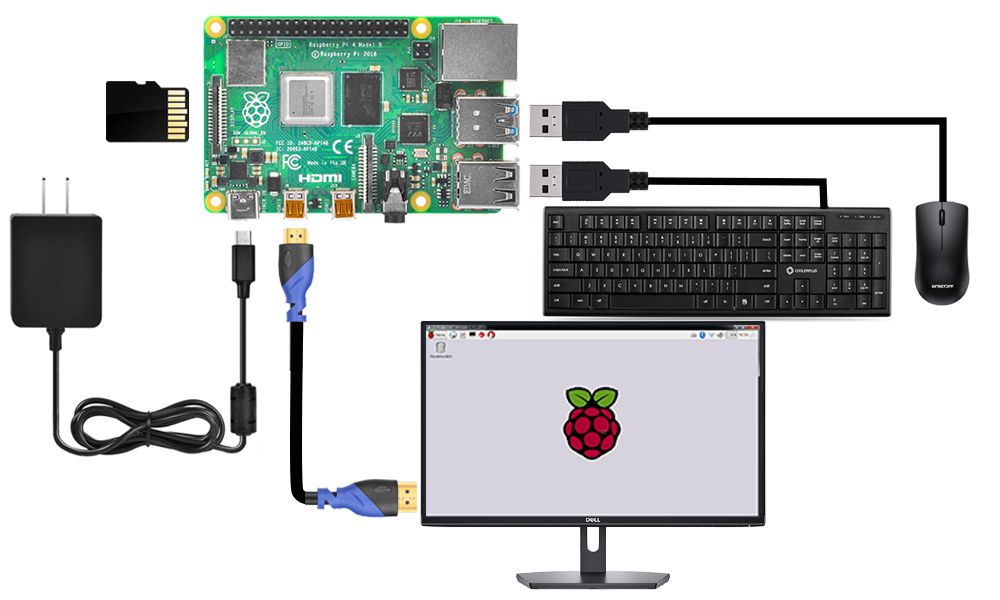
1. Schließe den Raspberry Pi an Deinen HDMI Monitor oder Fernseher an. Verbinde eine Tastatur und eine Maus mit den USB Ports des Raspberry Pi. Stecke die SD Card in den Card-Slot des Raspberry Pi.
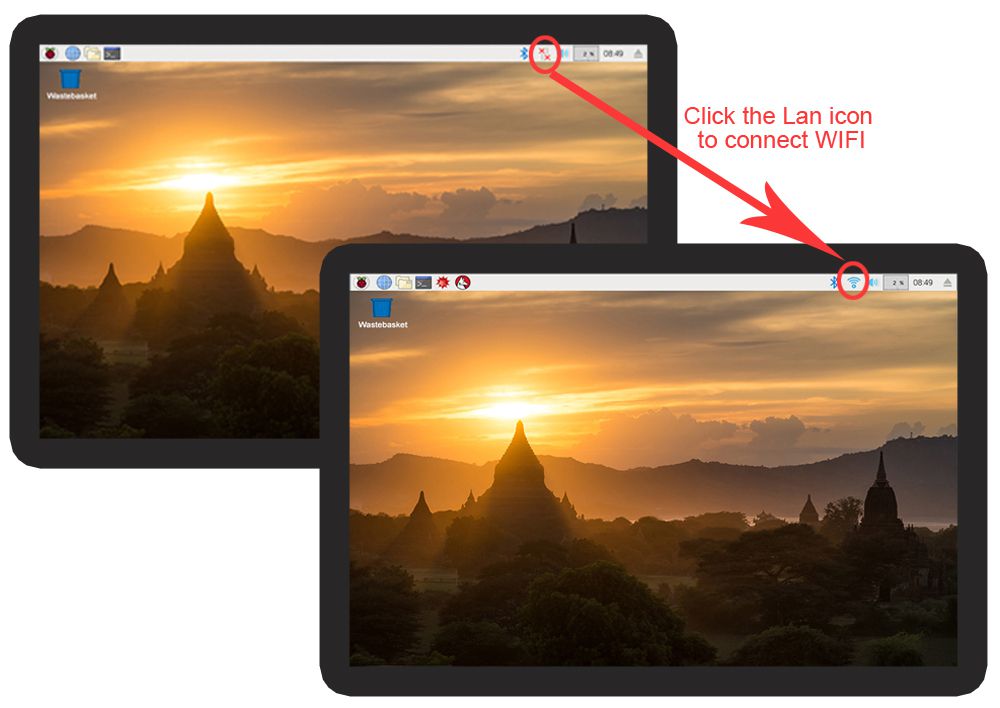
2. Klick das Netzwerk-Symbol in der rechten oberen Bildschirmecke und wähle Deine WIFI SSID, dann gib Dein WIFI Passwort ein, um Dich zu Deinem Router zu verbinden.
3. Wenn Du mit der Maus über das Netzwerksymbol fährst bekommst Du folgende Information:
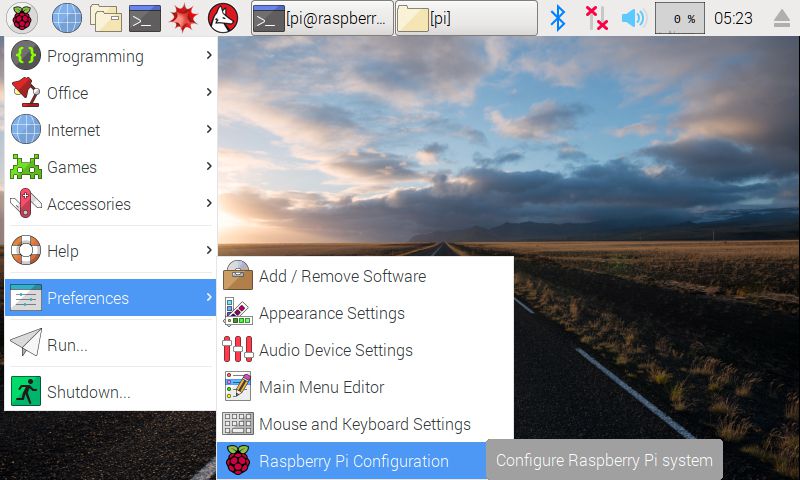
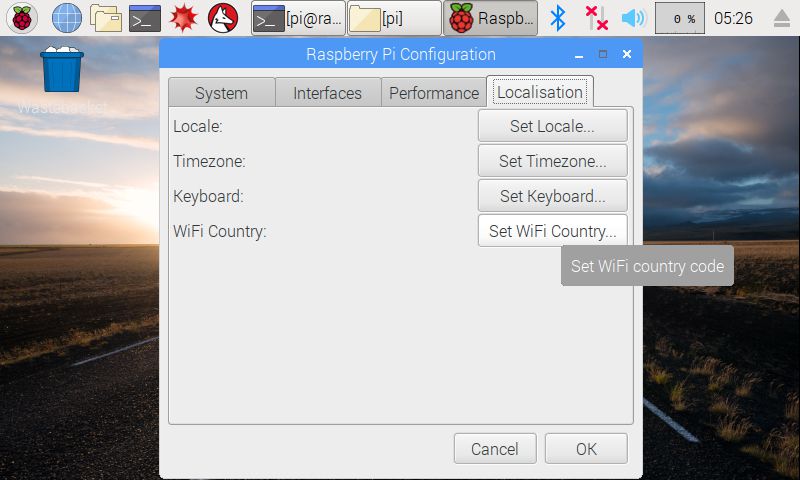
4. Zum Einrichten der WIFI Verbindung muss die Lokalisierung konfiguriert werden. Gib hier zum Beispiel DE für Deutschland ein.
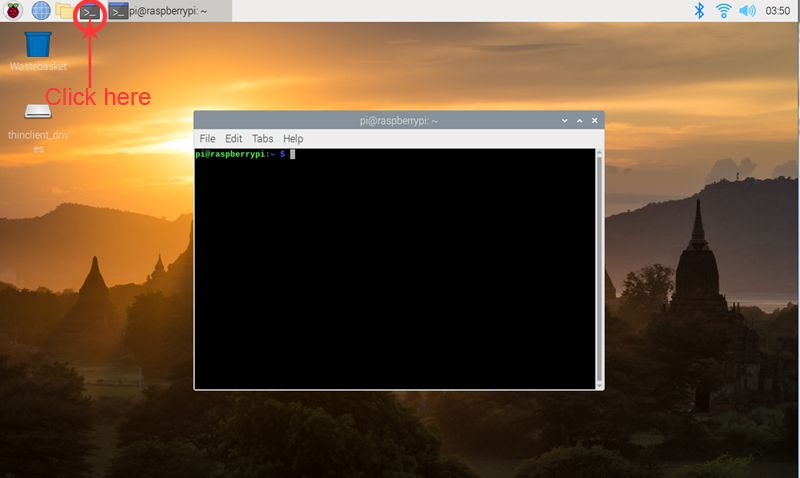
5. klick das Terminal Symbol auf dem Bildschirm oder drücke CTRL+ALT+T gleichzeitig, dann sollte sich das Terminalfenster öffnen.
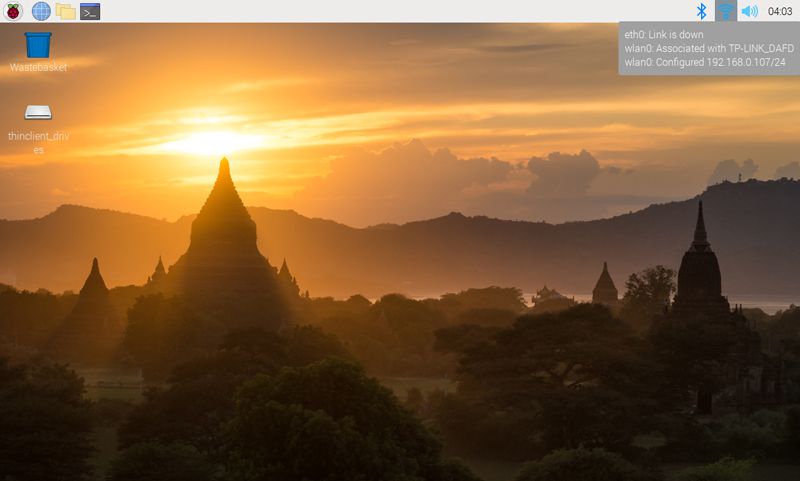
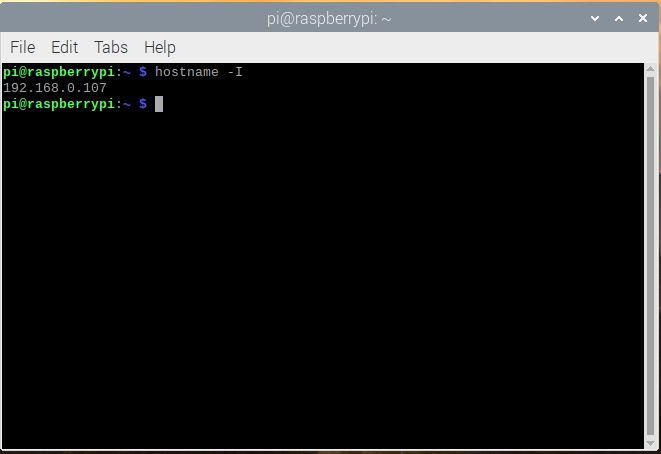
6. Bestimme die IP Adresse des RPi. Methode A: Verbinde Deinen Pi mit Monitor und Maus, und bewege zur Anzeige der IP-Adresse die Maus über das Netzwerk-Symbol.
Methode B: Du kannst die IP Adresse auch durch Eingabe eines Terminal Kommandos ermitteln:
hostname -I
7. Aktiviere SSH: gebe das Terminal Kommando ein:
sudo raspi-config
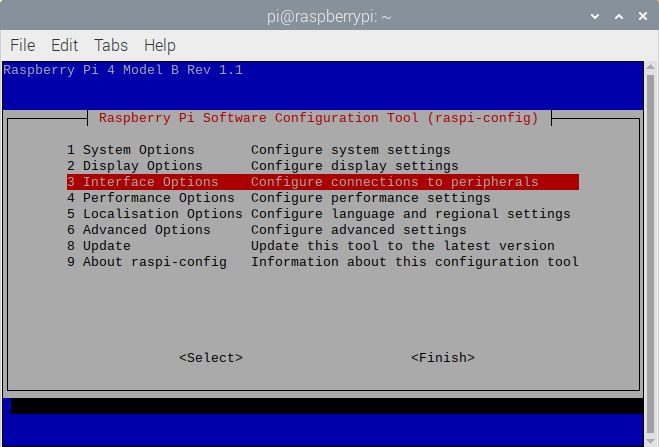
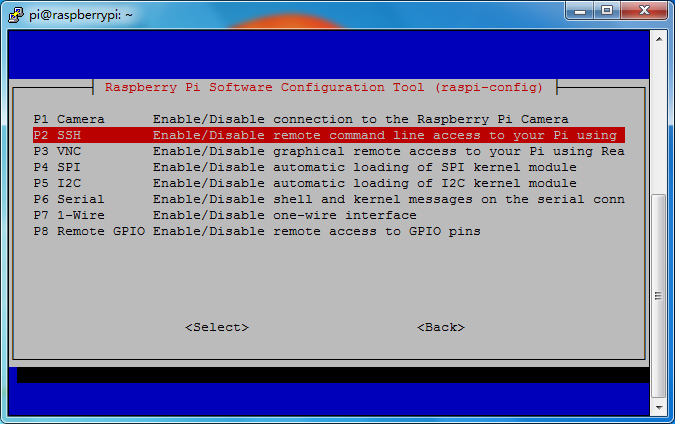
Wähle auf dem sich öffnenden Menü Interface Options ->SSH -> Yes -> Select ->Finish (Hinweis: Benutze die Pfeiltasten der Tastatur zur Positionierung des Cursors und drücke “Enter” um die Auswahl zu bestätigen.
B. Remote Terminalbetrieb
Hinweis: Für Raspbian / Raspberry Pi OS Release 2016-11-25 oder neuer ist SSH (ein Protokoll für sicheren Remote Betrieb und andere Netzwerkdienste) standardmäßig deaktiviert. Deshalb musst Du, wenn Du dich Remote verbinden willst, zuerst SSH aktivieren. Das geschieht über Erzeugen eines leeren Files “ssh” auf der SD Card.
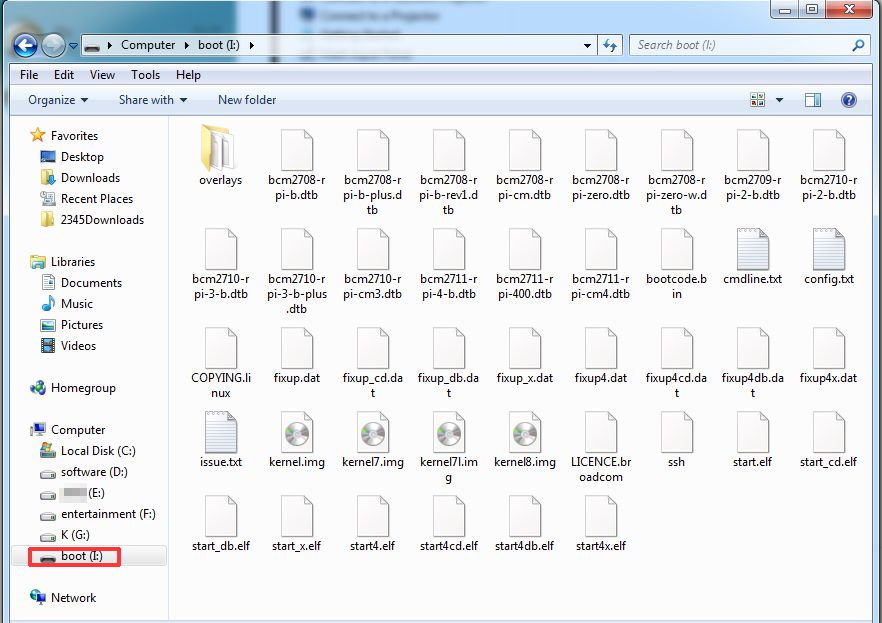
1. Stecke die Micro SD Card mit dem Raspberry Pi OS in den USB Micro SD Card Reader und verbinde den USB Micro SD Card Reader mit Deinem PC.
2. Betrachte mit dem File Explorer den Inhalt der Micro SD Card.
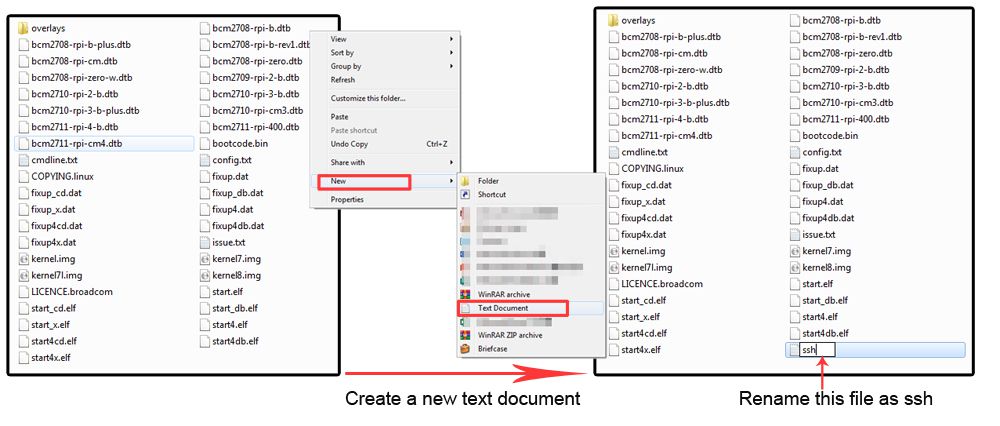
3. Erzeuge ein leeres Textfile und speichere es wie im folgenden Bild gezeigt auf der SD Card. Ändere den Namen des Textfiles zu “ssh” .
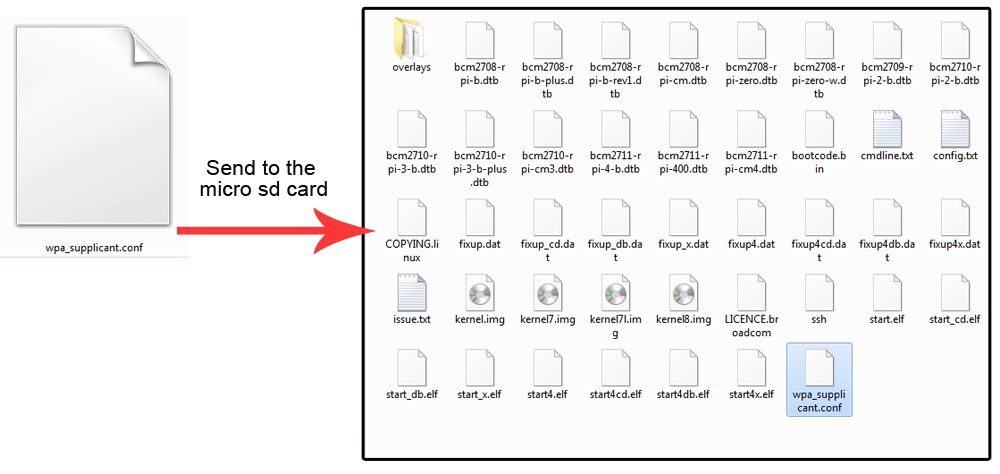
4. Lade das hier verlinkte File “wpa_supplicant.conf” und editiere es dann mit Notepad++. Gebe für Dein WIFI Netzwerk SSID und Passwort ein.
ssid="Your wifi-A ssid"
psk="ssid password"
The content of “wpa_supplicant.conf” as following:
5.Speichere das von Dir editierte File “wpa_supplicant.conf” dann auf der Micro SD Card
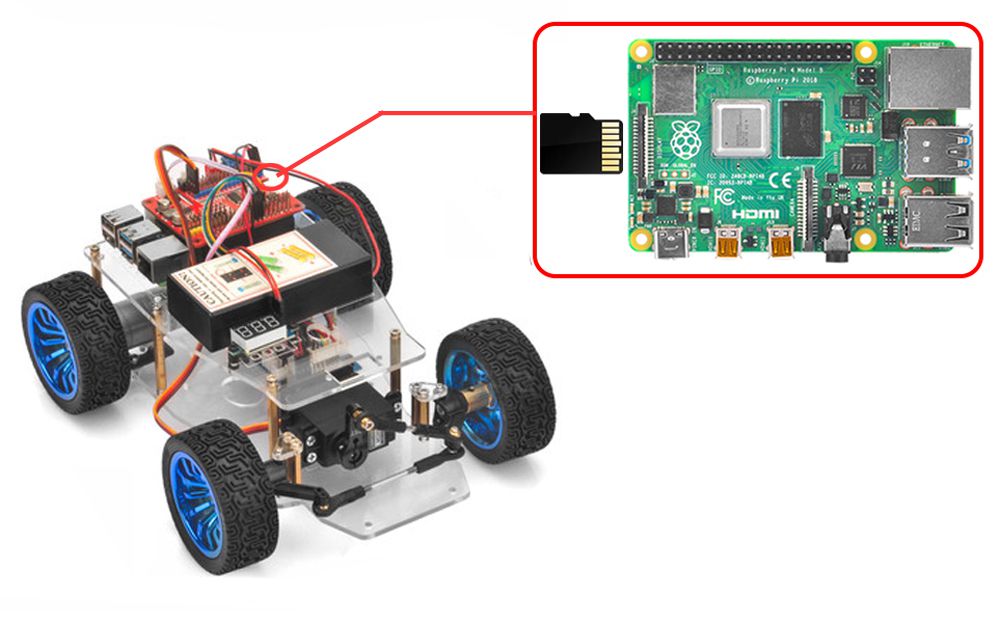
6. Stecke die MicroSD Card in den Raspberry Pi und schalte ihn dann ein.
7. Ermittle die IP Adresse Deines Raspberry Pi, indem Du Dich in Deinen Router einloggst und dort nachsiehst (im folgenden Bild z.B. ein ASUS Router) – oder Du hast Sie schon im Direkten Terminalbetrieb ermittelt (siehe oben), oder Du kannst auch eine IP-address scan APP benutzen um Deine IP Adresse zu ermitteln.
8. Nutze ein ssh Tool um den Raspberry Pi fernzusteuern.
Bemerkung: Für die drei Plattformen Windows, Mac und Linux kann sich das Vorgehen leicht unterscheiden.
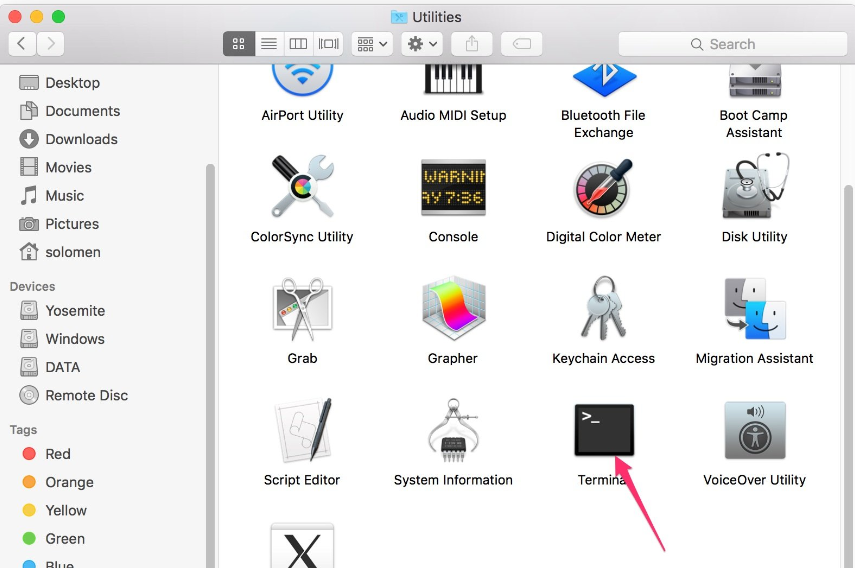
(1) Linux und Mac Nutzer können sich einfach in den Raspberry Pi über ssh einloggen. Unter Linux oder auf dem Mac suche das Terminal-Symbol und öffne das Programm.
Schreibe ssh pi@IP address (ssh ist das Programm für Remote Login, pi ist der Nutzername, IP address ist die RPi IP-Adresse) und dann drücke zur Bestätigung Enter. Zum Beispiel:
ssh [email protected]
Wenn Du eine Meldung bekommst, dass ssh nicht gefunden wurde, musst Du ein ssh tool zum Beispiel unter Ubuntu und Debian selbst installieren:
sudo apt-get install ssh
(2) Windows Nutzer können zum Remote-Einloggen auf den Raspberry Pi ein ssh-Tool wie PuTTY nutzen.
Schritt 1. Lade PuTTY von hier: https://www.chiark.greenend.org.uk/~sgtatham/putty/ und installiere es auf Deinem Windows PC.
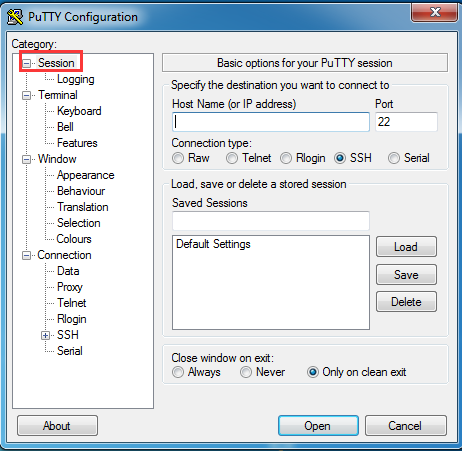
Schritt 2. Öffnen PuTTY und klick Session in der Baumstruktur links:
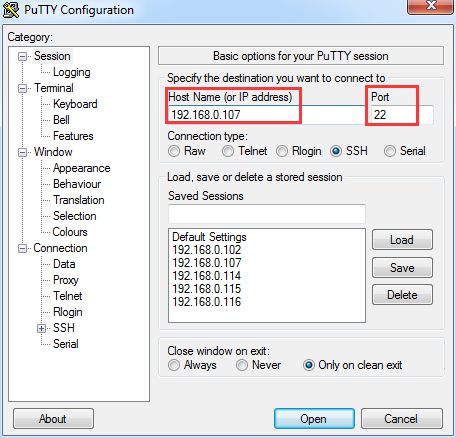
Schritt 3. Gib die IP Adresse Deines Raspberry Pi in der Textbox unter Host Name (or IP address) ein und 22 unter Port (ist standardmäßig 22) ,dann klick “Open”.
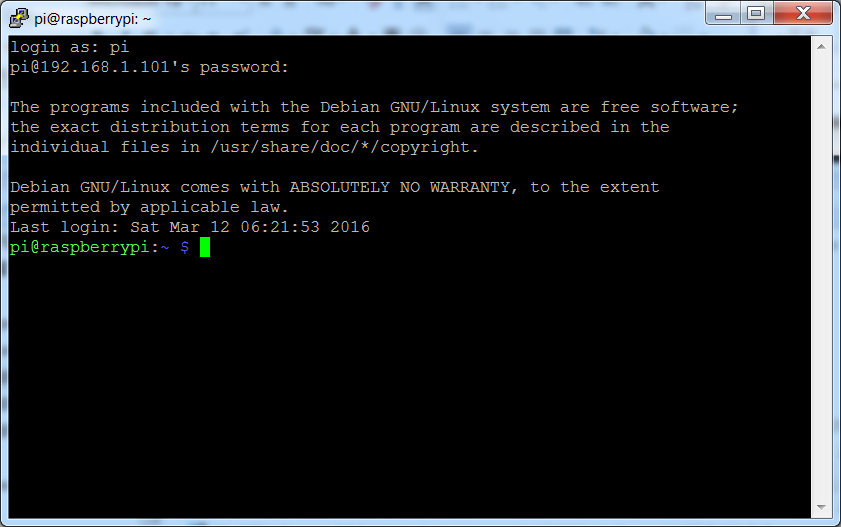
Schritt 4. Hinweis: wenn Du Dich zum ersten Mal mit der IP Adresse am Raspberry Pi anmeldest, folgt ein Sicherheitshinweis. Bestätige den einfach mit “Yes” / “Ja”. Nach Öffnen des PuTTY Fensters erfolgt die Frage “login as”. Gib hier den Nutzernamen ein: pi, und danach das Passwort: raspberry (das standardmäßige, wenn Du es nicht geändert hast). Hinweis: Während der Passworteingabe gibt es keinerlei Bildschirmreaktion; so konzentriere Dich einfach auf die Passworteingabe und drücke dann Enter. Wenn Du Dich erfolgreich in den Raspberry eingeloggt hast, sieht der Bildschirm wie folgt aus:
Nachdem Du gelernt hast, das Raspberry Pi OS zu installieren und das Terminal zur Steuerung des Raspberry Pi zu nutzen kannst Du mit den nächsten Schritten fortfahren und das in Lektion 1 aufgebaute Roboterauto testen.
Hinweis: In unseren Beispielen nutzen wir einen Windows PC als Remote Terminal und PuTTY als ssh Programm.
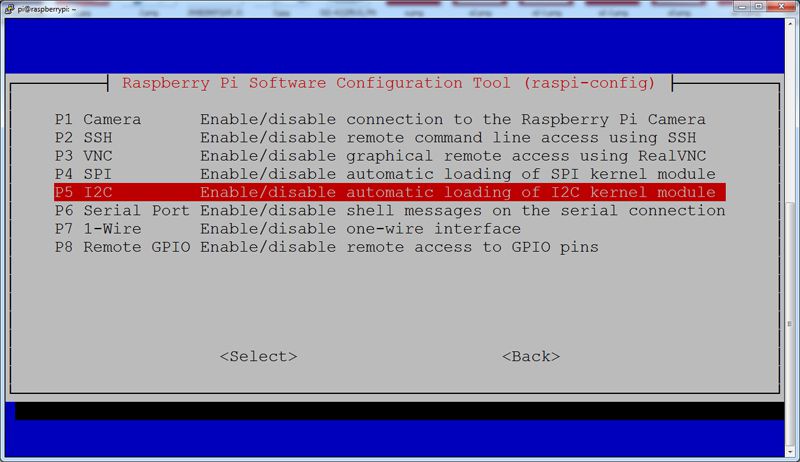
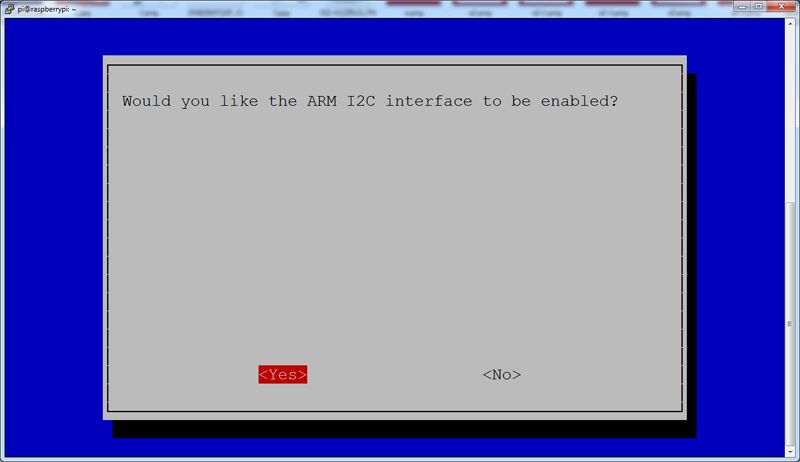
Schritt 1: Schalte die Stromversorgung des Autos ein und aktiviere mit folgenden Kommandos I2C: (I2C ist ein serielles Protokoll zum Datenaustausch mit I2C Geräten).
sudo raspi-config
Dann wähle: Interfacing Options->I2C->Yes->Select->Finish
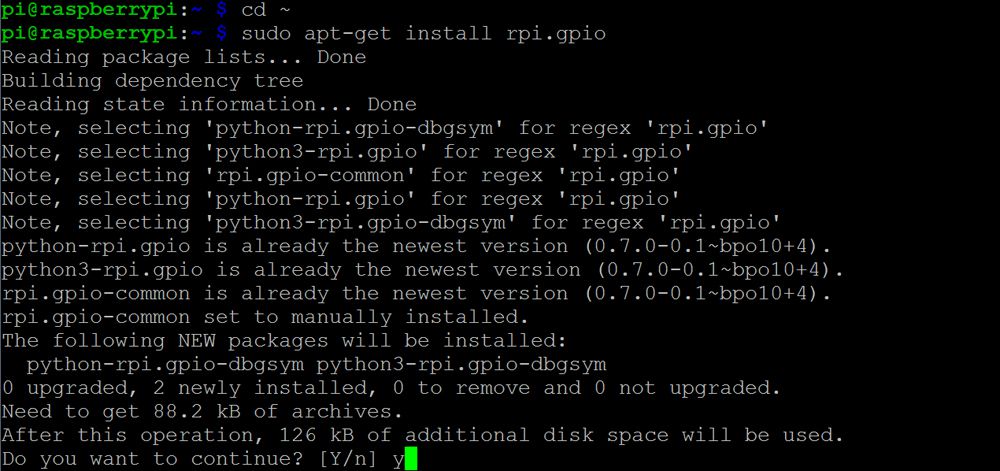
Schritt 2: Installiere mit folgenden Kommandos die GPIO und pca9685 PWM Bibliotheken:
cd ~
sudo apt-get install rpi.gpio
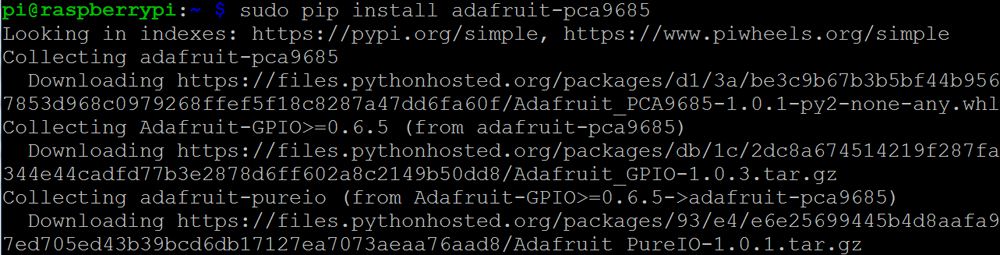
sudo pip install adafruit-pca9685
Hinweis: wir setzen voraus, dass Du das aktuelle Raspbian OS benutzt, das pip (installiert python Module) und Flask (ein Webframework) beinhaltet. Wenn Du ein anderes OS benutzt dann installiere zuerst pip und Flask.
Schritt 3: ermittle mit folgenden Kommandos die Geradeaus-Position des Servos:
Schritt 4: Wenn Dein Steuer-Servo nach dem Programmdurchlauf nicht genau geradeaus zeigt, dann hast Du zwei Möglichkeiten:
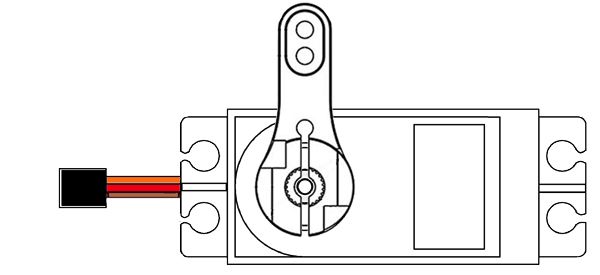
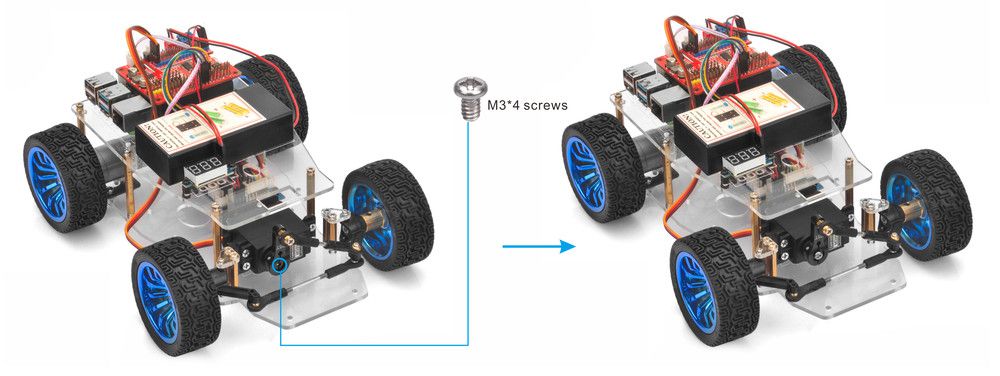
Option 1 ) Schalte die Stromversorgung des Roboterautos aus und entferne das Servo-Horn vom Servo-Motor. Installiere das Servo-Horn wie auf folgendem Bild gezeigt und schraube es mit einer M3*4 Schraube fest..
Option 2) Schraube das Servo-Horn mit einer M3*4 Schraube fest und gebe folgende Kommandos im Terminal ein:
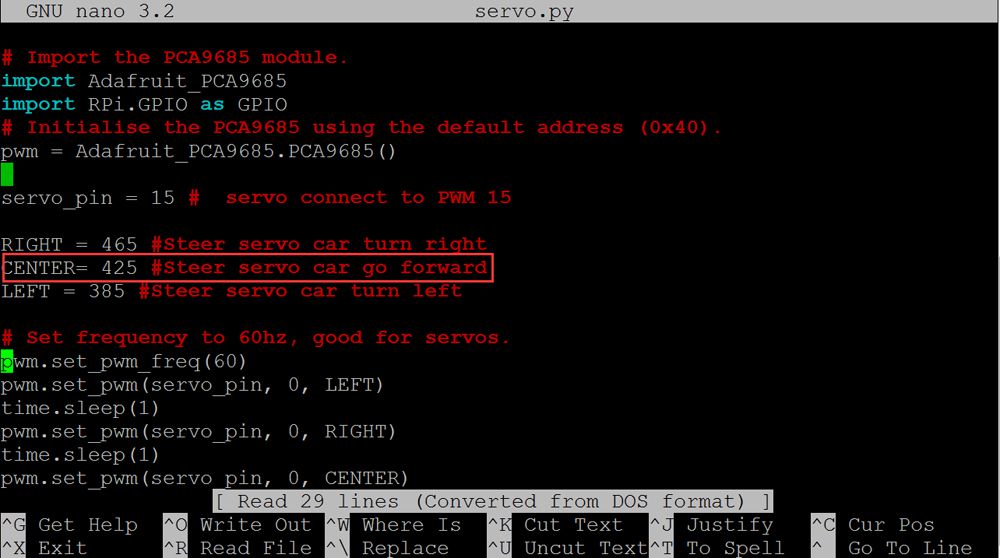
sudo nano servo.py
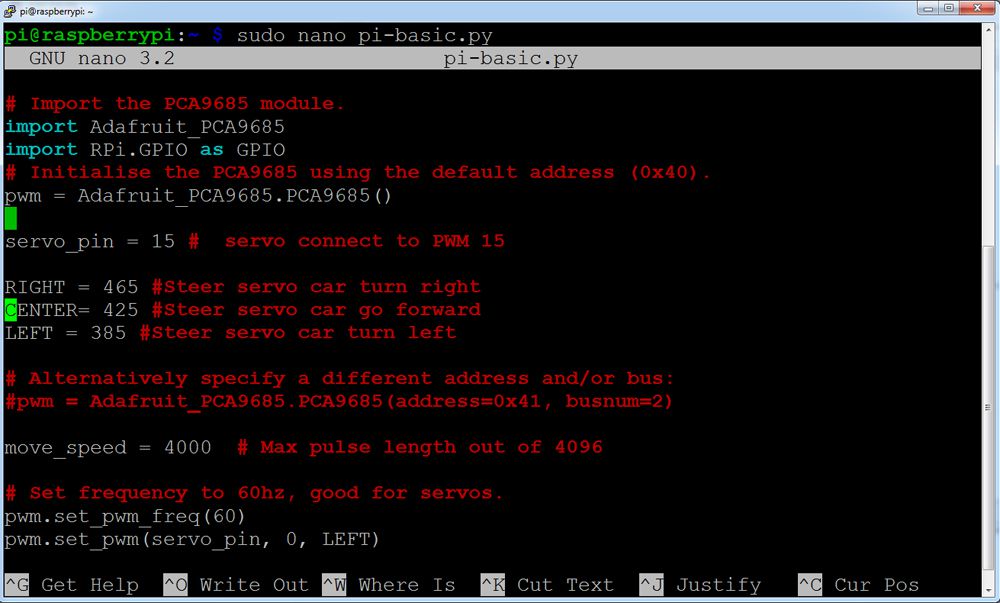
Du kannst dann den Standardwert für die CENTER-Position in Zeile 20.
CENTER= 425 #Steer servo car go forward
Wenn die Vorderräder nach links zeigen, dann erhöhe den Wert von 425 auf 430, 435, 440 …
Wenn die Vorderräder nach rechts zeigen, dann verringere den Wert von 425 auf 420, 415, 410 …
Dann klick zum Speichern dieses Files “ctrl” + “x”, und dann Y und gebe das Kommando: python servo.py erneut ein. Wiederhole diese Schritte bis die Vorderräder nach geradeaus zeigen und merke Dir diesen Wert für Code-Änderungen in den folgenden Lektionen.
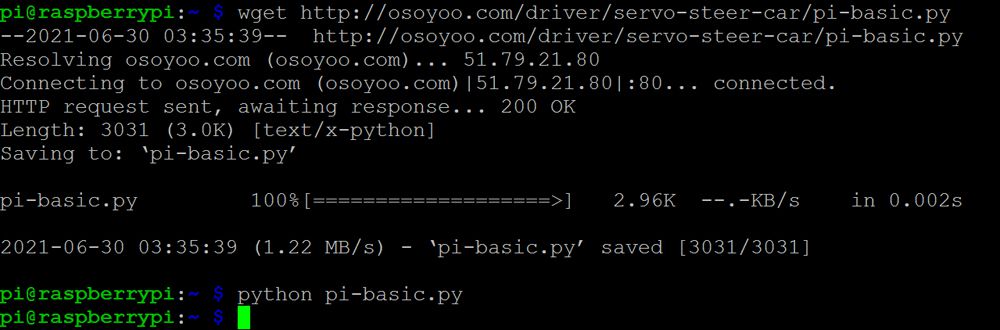
1. Schalte die Stromversorgung des Autos ein und gebe im Terminal folgende Kommandos ein:
2. Nach den Eingaben oben läuft das Python Programm und das Auto fährt erst vorwärts, dann rückwärts, dreht nach links, danach nach rechts, fährt rückwärts nach rechts und zum Schluss rückwärts nach links.
3. Jetzt rufe mit folgendem Kommando den Nano-Editor auf, um im pi-basic.py Programm jetzt auch den Standard CENTER Geradeauswert von 425 zu ändern. Wenn Du die Geradeausposition von Hand eingestellt hast, überspringe diesen Punkt.
sudo nano pi-basic.py
Du kannst den Beispiel Python Code über folgenden Link laden https://osoyoo.com/driver/p3-car/v3car-basic.py und über Notepad++ anschauen. Mit etwas Python Grundwissen kannst Du den Code leicht für Deine eigenen Zwecke anpassen.

















 3. Wenn Du mit der Maus über das Netzwerksymbol fährst bekommst Du folgende Information:
3. Wenn Du mit der Maus über das Netzwerksymbol fährst bekommst Du folgende Information: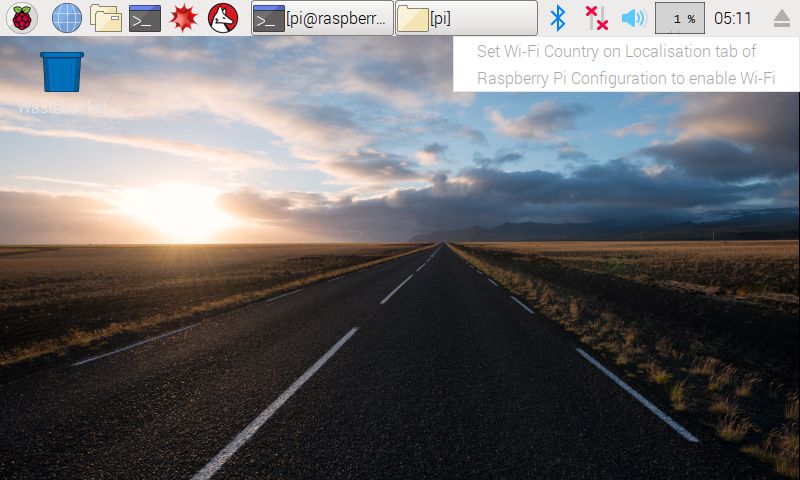



 Nachdem Du gelernt hast, das Raspberry Pi OS zu installieren und das Terminal zur Steuerung des Raspberry Pi zu nutzen kannst Du mit den nächsten Schritten fortfahren und das in Lektion 1 aufgebaute Roboterauto testen.
Nachdem Du gelernt hast, das Raspberry Pi OS zu installieren und das Terminal zur Steuerung des Raspberry Pi zu nutzen kannst Du mit den nächsten Schritten fortfahren und das in Lektion 1 aufgebaute Roboterauto testen.