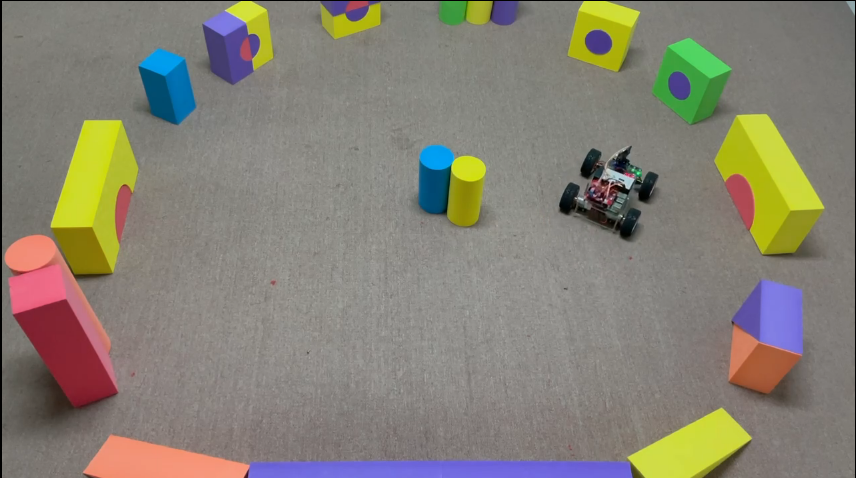
En esta lección, nuestro coche robot Raspberry Pi utilizará un sensor ultrasónico para detectar obstáculos, conducir de forma automática y evitar colisiones.
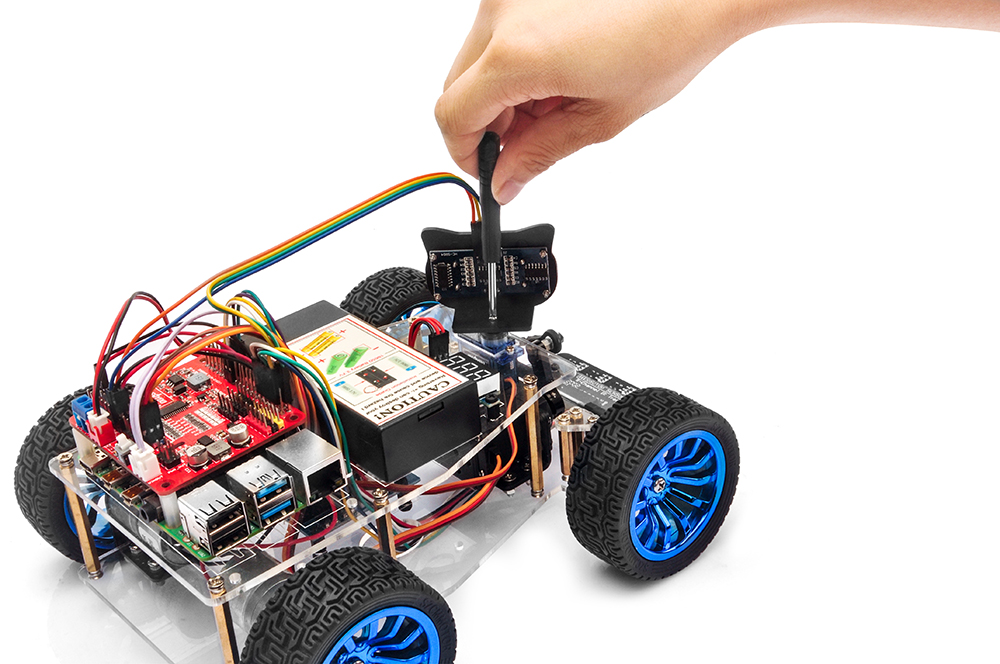
Paso 2: Instala el motor servo en la parte frontal del chasis superior del coche con 2 tornillos autorroscantes M2.2*8.
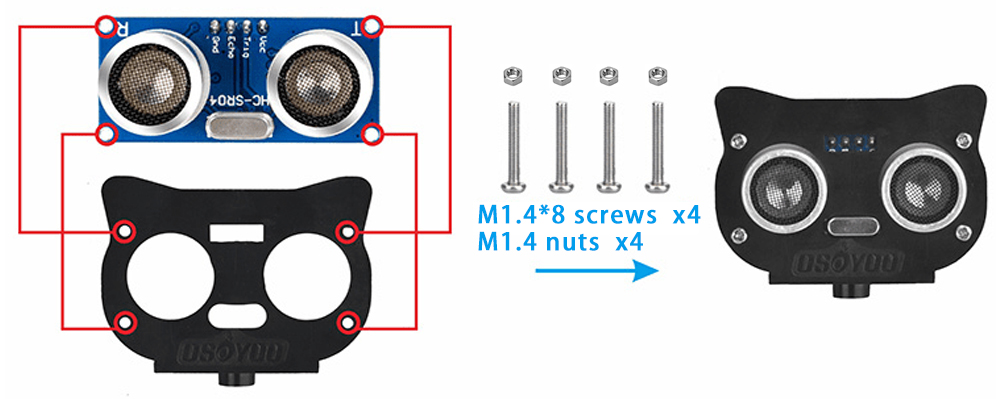
Paso 3: Instala el módulo ultrasónico en el soporte de montaje con 4 tornillos M1.4*8 y tuercas M1.4.
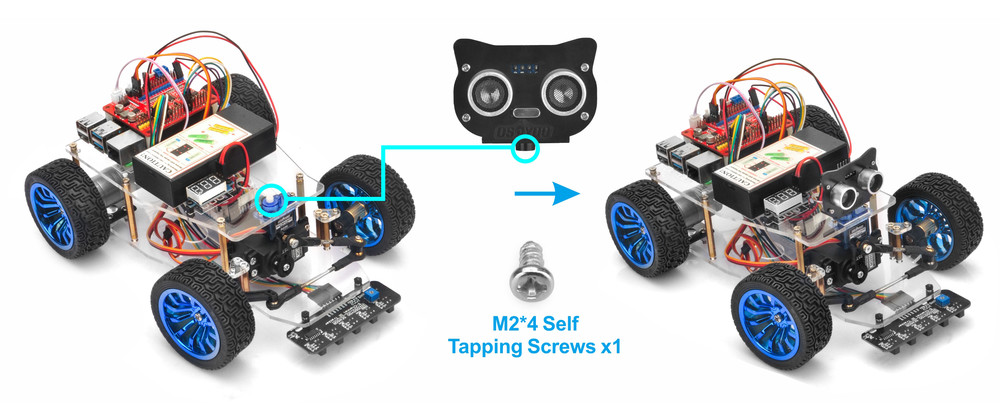
Paso 4: Instala el soporte ultrasónico en el micro motor servo con 1 tornillo autorroscante M2*4.
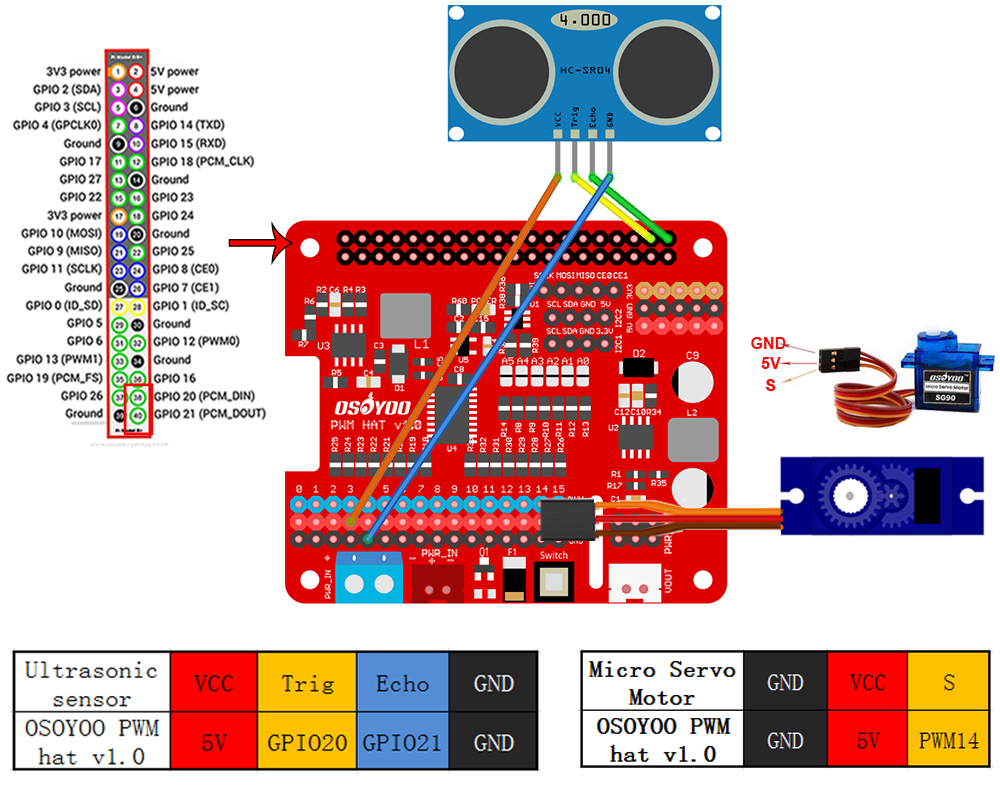
Conecta el soporte del sensor ultrasónico al motor servo SG90 al puerto PWM 14 de la placa OSOYOO PWM HAT y conecta GND y VCC del módulo ultrasónico a GND y 5V de la placa OSOYOO PWM HAT. Luego, conecta TRIG y ECHO del módulo ultrasónico a los pines GPIO20 y GPIO21 de Raspberry Pi según el siguiente diagrama (Recuerda: NO retires los cables existentes instalados en la Lección 1):
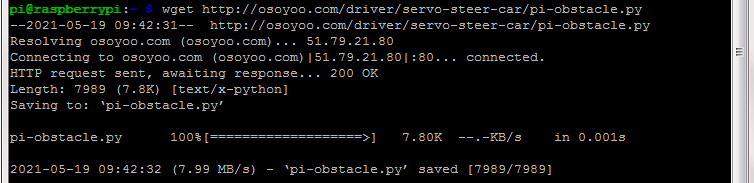
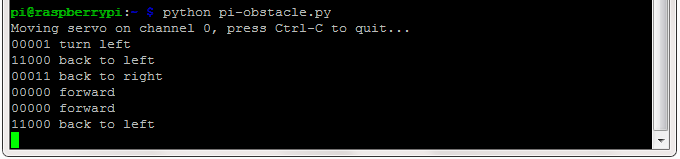
Descarga el código Python escribiendo el siguiente comando en la terminal de tu Raspberry Pi:
Enciende la batería de tu coche y tu servo y ejecuta el programa.
Si estás utilizando Python 2 en Raspberry Pi, escribe:
python pi-obstacle.py
Tu servo girará el sensor ultrasónico a la posición frontal durante 3 segundos. Si tu sensor no está mirando hacia adelante, apaga la batería o presiona la tecla Ctrl-C para detener el programa. Luego, retira el sensor del servo y reinstálalo, asegurándote de que mire hacia adelante y fíjalo en su posición con un tornillo. Ahora puedes escribir el mismo comando python pi-obstacle.pyy ejecutar el programa nuevamente
Ahora el coche realizará automáticamente una conducción evitando obstáculos.