En esta lección, te mostraremos cómo utilizar Python3 Flask y el software M-Jpeg Streamer para controlar un coche robot Raspberry Pi a través de Internet. Podrás monitorear el movimiento en tiempo real del coche a través de su “ojo” (cámara frontal).
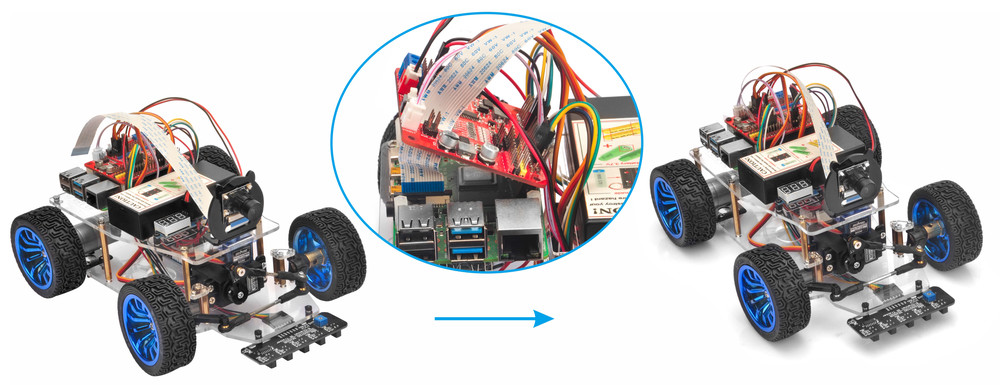
Paso 1: Debes completar y probar la lección 2 antes de continuar con esta lección, luego instala un nuevo servo SG90 azul en la posición del servo. Conecta el servo SG90 al puerto 14 de la placa OSOYOO PWM HAT.
Paso 2: Elige un soporte con ranura en el servomotor para atravesar el soporte de la cámara de arriba a abajo y fija la cuchilla con tornillos autorroscantes M1.5 * 6.
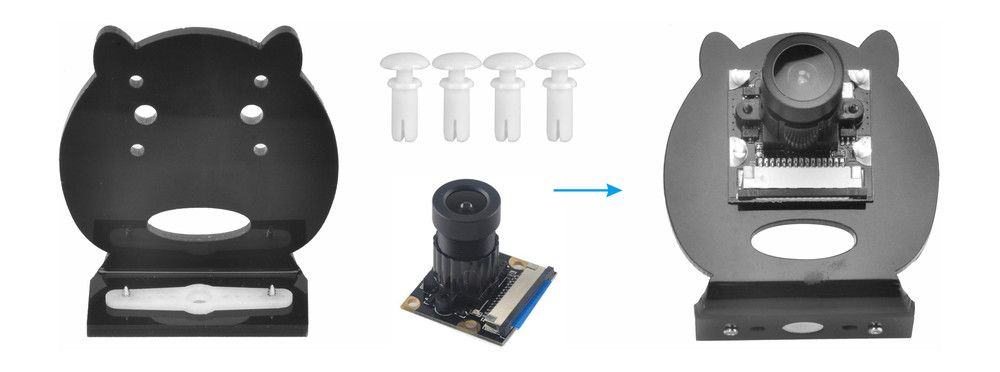
Paso 3: Instala la cámara CSI en el soporte con 4 remaches de empuje M2.
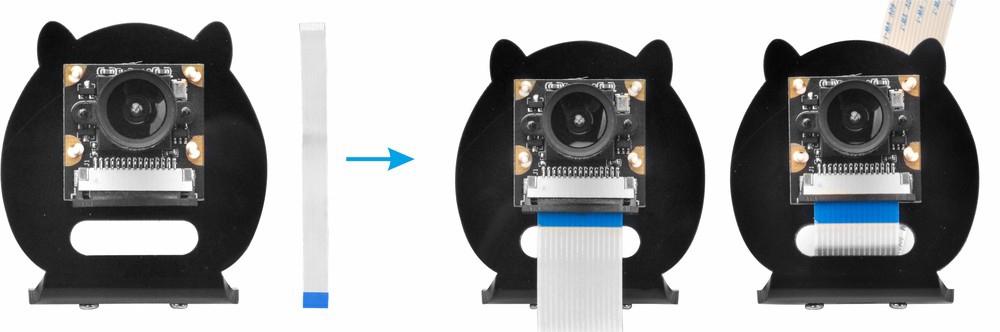
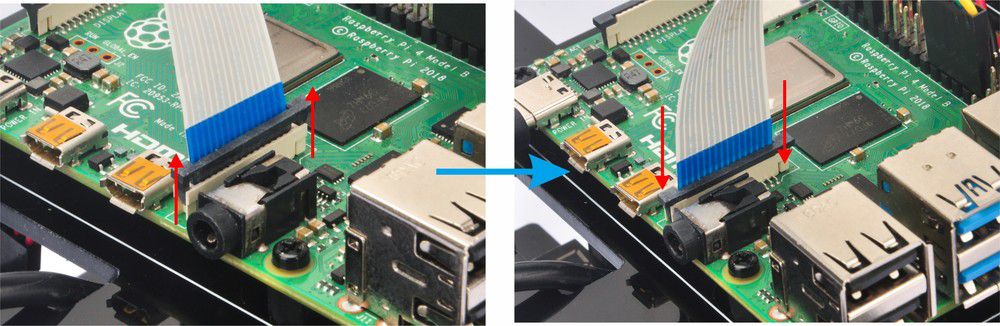
Paso 4: Conecta la cámara CSI con el cable de cinta CSI (Presta atención a las conexiones del cable antes de instalarlo).
Paso 5: Instala el soporte de la cámara en el servomotor con un tornillo autorroscante M2 * 4.
El servo debe estar instalado y conectado al puerto 15 de la placa OSOYOO PWM HAT. Conecta la cámara CSI al puerto CSI del Raspberry Pi con el cable de cinta CSI (Presta atención a las conexiones del cable antes de instalarlo).
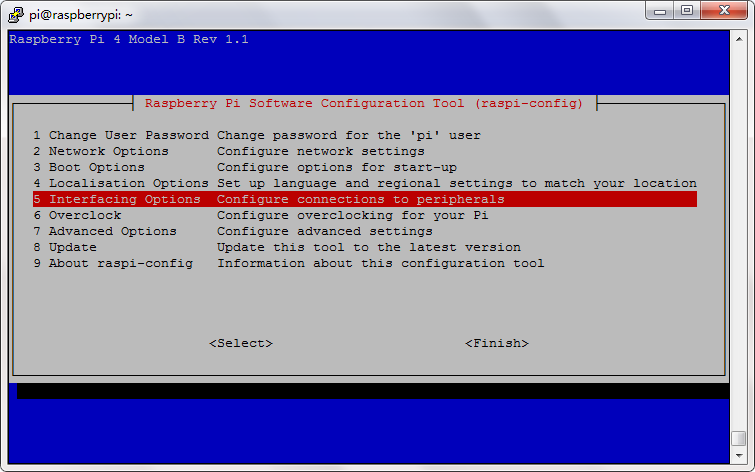
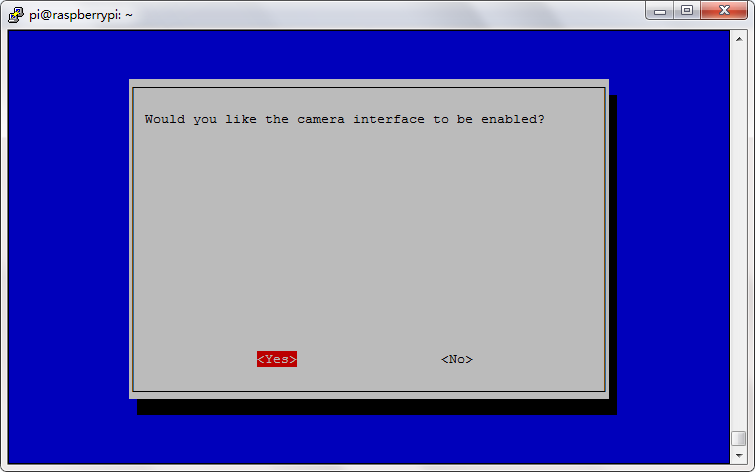
Paso 1: Activa la cámara en el Raspberry Pi escribiendo el siguiente comando
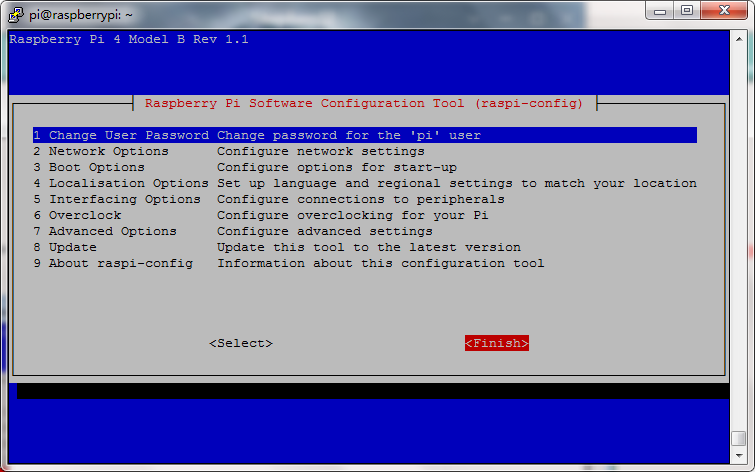
sudo raspi-config
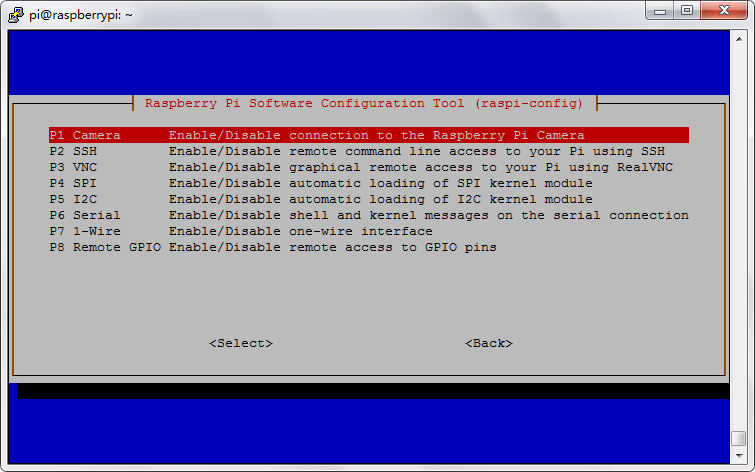
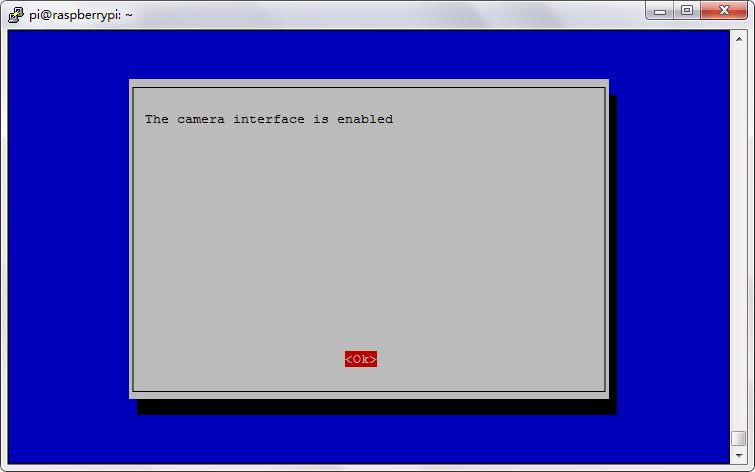
Luego selecciona ->5 Opciones de interfaz->P1 Cámara->Sí->Ok->Finalizar (Reinicia el Raspberry Pi según las instrucciones)
Paso 2: Escribe el siguiente comando para instalar el software mjpeg-streamer:
Después de ejecutar los comandos anteriores, el software mjpeg-streamer quedará instalado en tu Raspberry Pi. ¡Es muy sencillo!
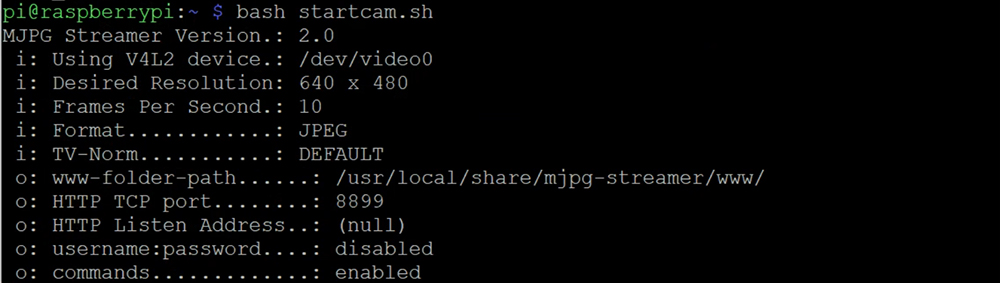
Paso 3: Inicia el servidor mjpeg-streamer en tu Raspberry Pi
Ejecuta el siguiente comando en la terminal de tu Pi para iniciar tu servidor mjpeg-streamer
bash startcam.sh
Estos mensajes indican que tu servidor de video está funcionando en el puerto 8899 de tu Pi.
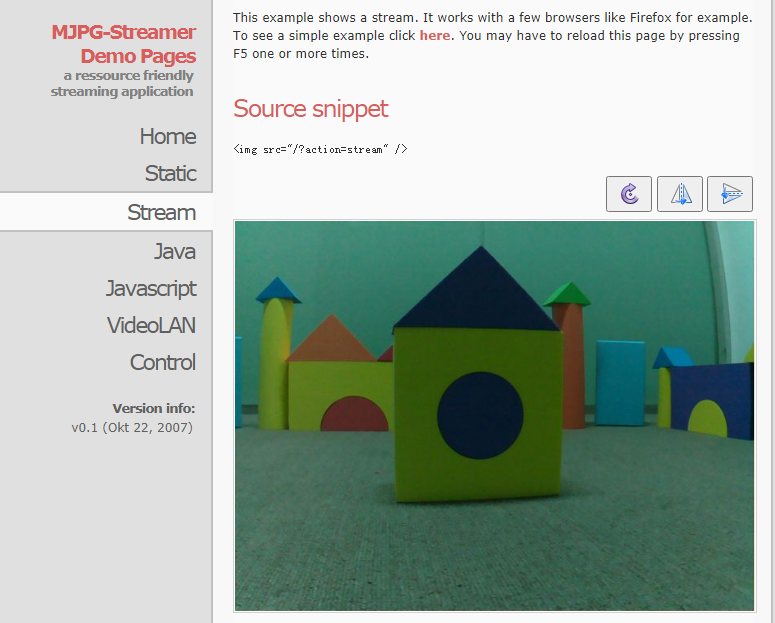
Paso 4: Ahora puedes utilizar tu navegador para probar el video de vigilancia. Por favor, visita http://tu_dirección_ip_del_Raspberry_Pi:8899 (en nuestro ejemplo, http://192.168.0.34:8899),
Haz clic en el enlace de transmisión o visita directamente http://tu_dirección_ip_del_Raspberry_Pi:8899/?action=stream, podrás ver el video de vigilancia.
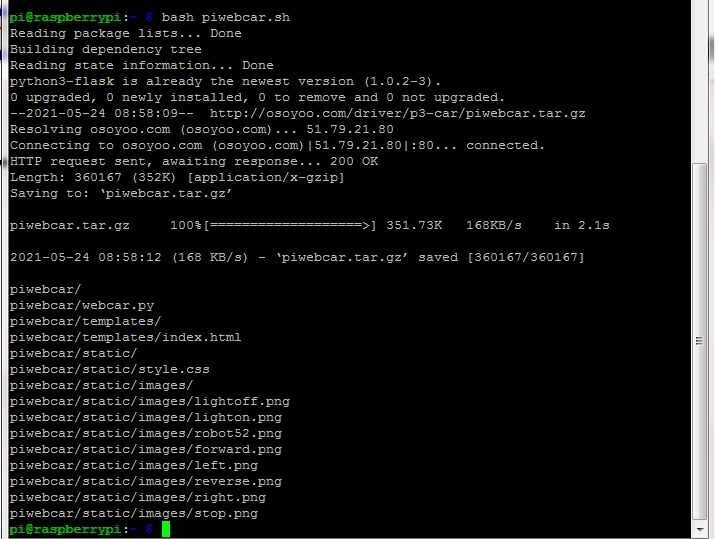
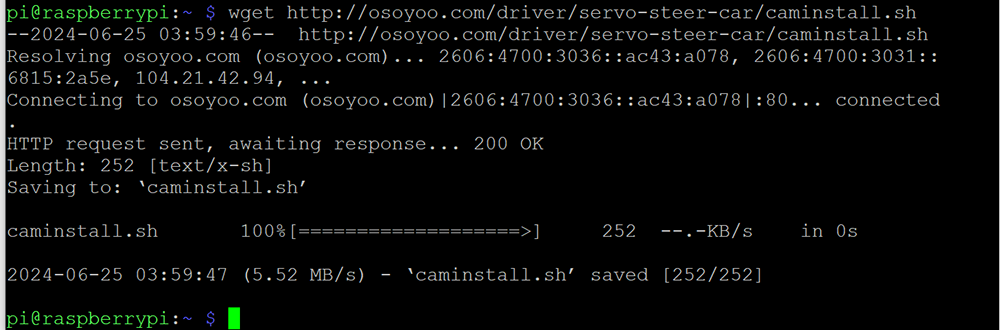
Paso 5: Abre una nueva ventana de terminal y ejecuta el siguiente código para instalar el software del coche robot controlado por cámara web OSOYOO.
wget http://osoyoo.com/driver/servo-steer-car/piwebcar.sh
Y luego escribe el siguiente comando:
bash piwebcar.sh
Paso 6: Escribe el siguiente comando para acceder a la carpeta piwebcar
cd piwebcar
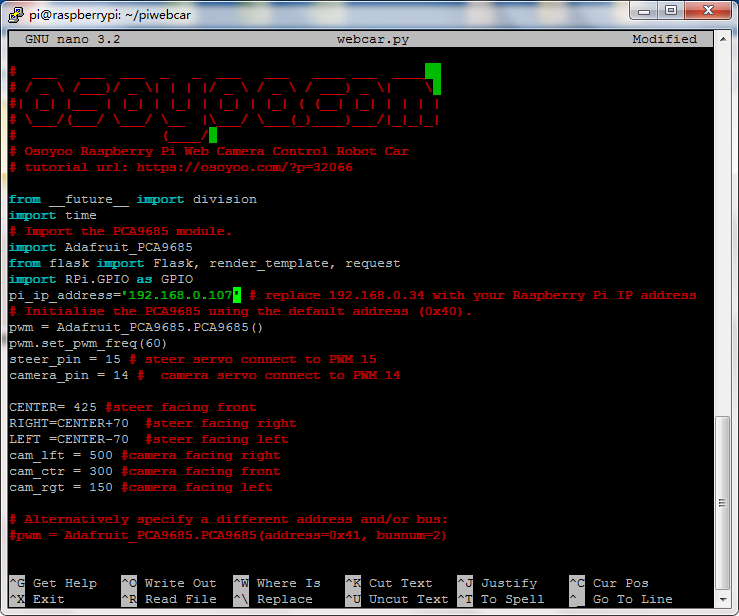
Paso 7: Luego escribe el siguiente comando para editar el archivo webcar.py
nano webcar.py
Reemplaza la dirección IP 192.168.0.34 en la línea 15 por la dirección IP de tu Raspberry Pi, luego presiona “Ctrl” + “X” y luego “Y” para guardar el archivo y finalmente presiona “Enter” para salir.
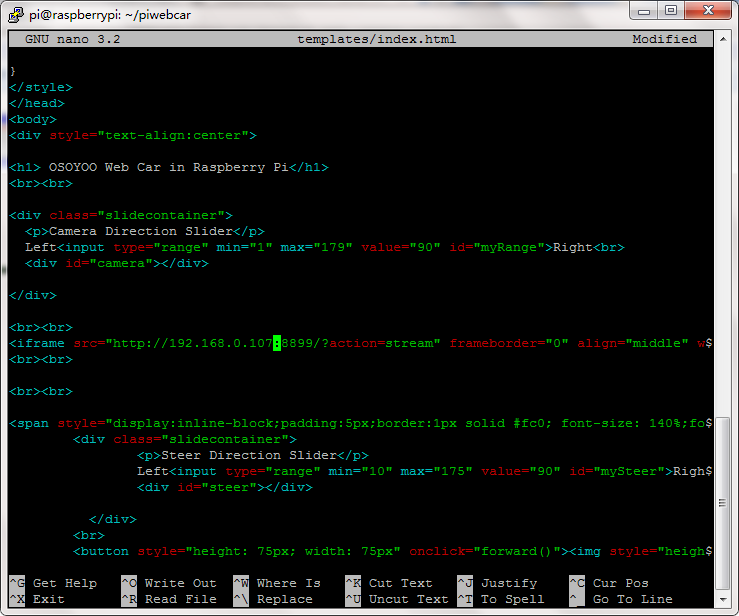
Paso 8: Luego escribe el siguiente comando para editar el archivo templates/index.html:
nano templates/index.html
nano templates/index.html
Por favor, cambia 192.168.0.34 en la línea 34 por la dirección IP de tu Pi, luego presiona “Ctrl” + “X” y luego “Y” para guardar el archivo y finalmente presiona “Enter” para salir.
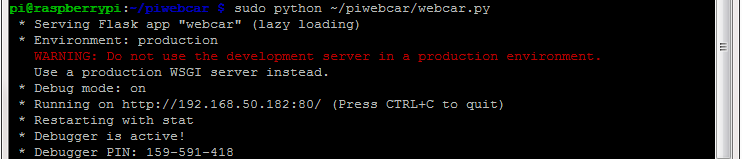
Paso 9: Ejecuta el código escribiendo el siguiente comando.
sudo python ~/piwebcar/webcar.py
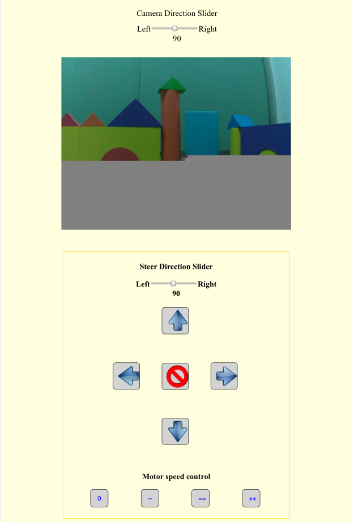
Paso 10: En tu PC o teléfono celular, que esté conectado a la misma red Wi-Fi que tu Raspberry Pi, abre el navegador y visita http://tu_dirección_IP_del_RaspberryPi, podrás ver la siguiente interfaz
Los botones con flechas son las teclas de control de dirección, el botón circular rojo en el centro es la tecla de PARADA. En la parte inferior hay cuatro botones de control de velocidad:
La tecla 0 significa la velocidad más lenta
La tecla – significa la segunda velocidad más lenta
La tecla = significa la velocidad normal
La tecla + significa la velocidad más rápida
En la parte superior de la página, hay un control deslizante de Dirección de la cámara, puedes mover el control deslizante para girar el servo y cambiar la orientación de la cámara.
Antes del botón Flecha superior, hay un control deslizante de Dirección de la dirección, puedes mover este control deslizante para girar tu rueda delantera (como girar el volante al conducir un automóvil).
Referencia: Marcelo Rovai : Servidor Web de Python con Flask y Raspberry Pi
https://towardsdatascience.com/python-webserver-with-flask-and-raspberry-pi-398423cc6f5d















 Y luego escribe el siguiente comando:
Y luego escribe el siguiente comando: