Dans cette leçon, nous vous montrerons comment utiliser Python3 Flask et le logiciel M-Jpeg Streamer pour contrôler une voiture robot Raspberry Pi via Internet. Vous pourrez surveiller le mouvement en temps réel de la voiture grâce à son œil (caméra avant).
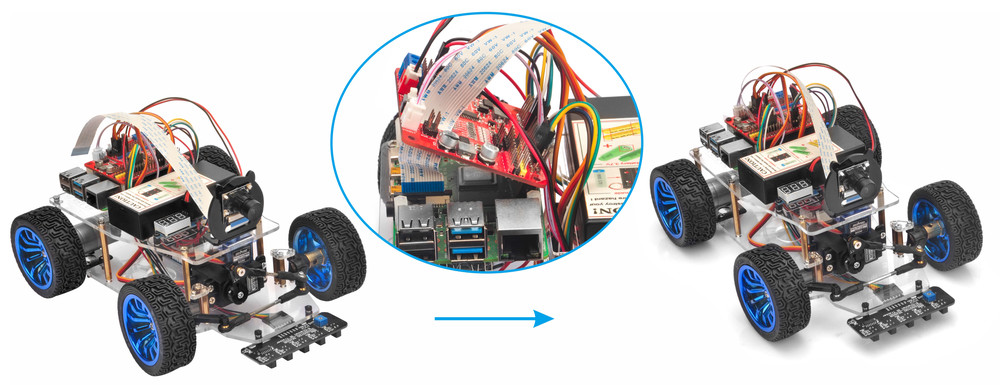
Étape 1 : Vous devez terminer et tester la leçon 2 avant de poursuivre cette leçon, puis installer un nouveau servo SG90 bleu sur la position du servo. Connectez le servo SG90 à la broche 14 de la carte OSOYOO PWM HAT.
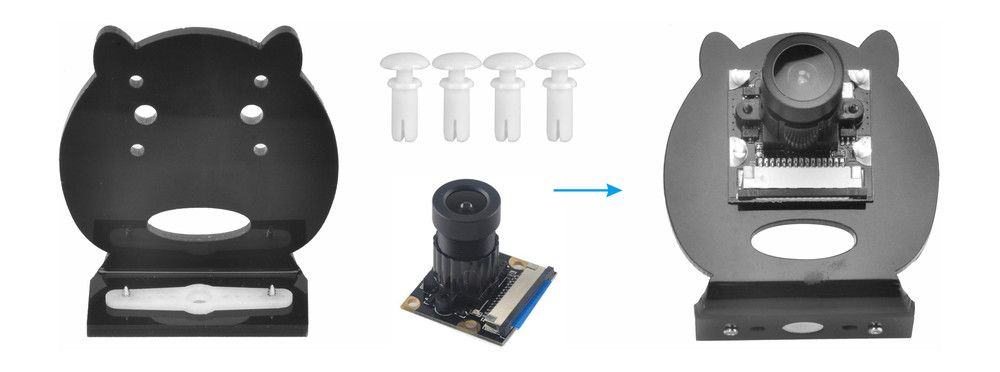
Étape 2 : Choisissez un support à fente dans le servomoteur pour traverser le support de la caméra de haut en bas et fixez la lame avec des vis autotaraudeuses M1.5 * 6.
Étape 3 : Installez la caméra CSI sur le support avec 4 rivets à poussée M2.
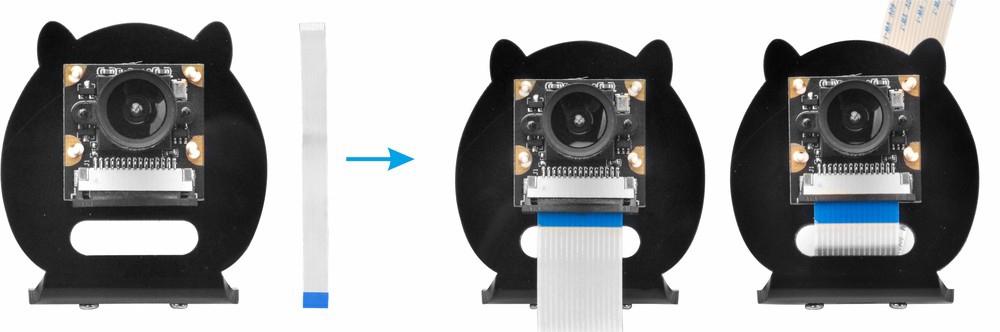
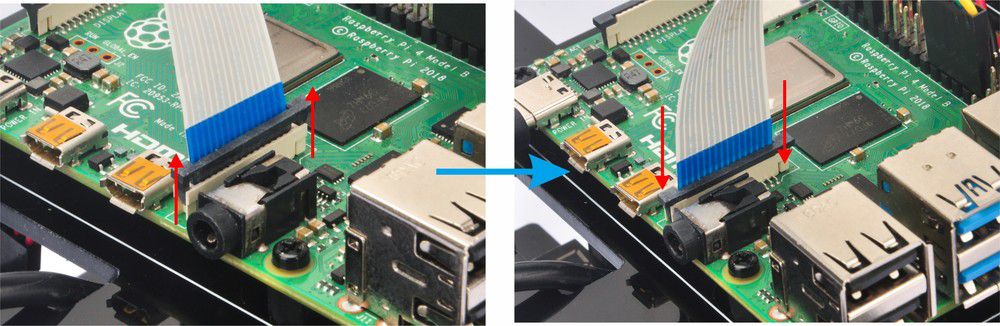
Étape 4 : Connectez la caméra CSI avec le câble ruban CSI (Veuillez faire attention aux connexions du câble avant de l’installer).
Étape 5 : Installez le support de la caméra sur le servomoteur avec une vis autotaraudeuse M2 * 4.
Le servo doit être installé et connecté à la broche 15 de la carte OSOYOO PWM HAT. Connectez la caméra CSI à l’emplacement CSI du Raspberry Pi avec le câble ruban CSI (Veuillez faire attention aux connexions du câble avant de l’installer).
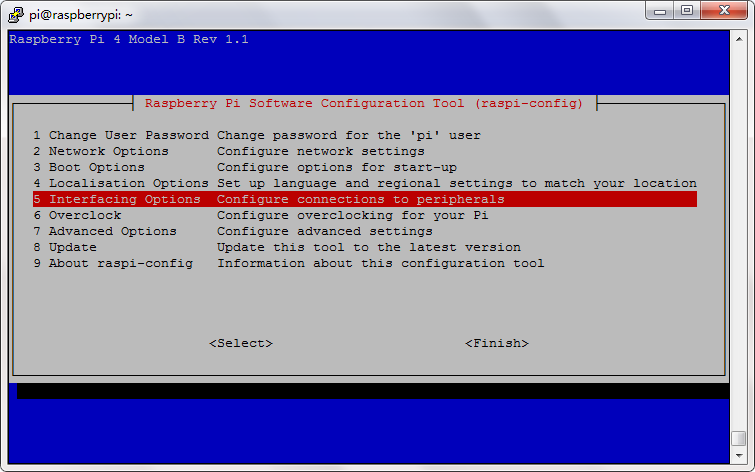
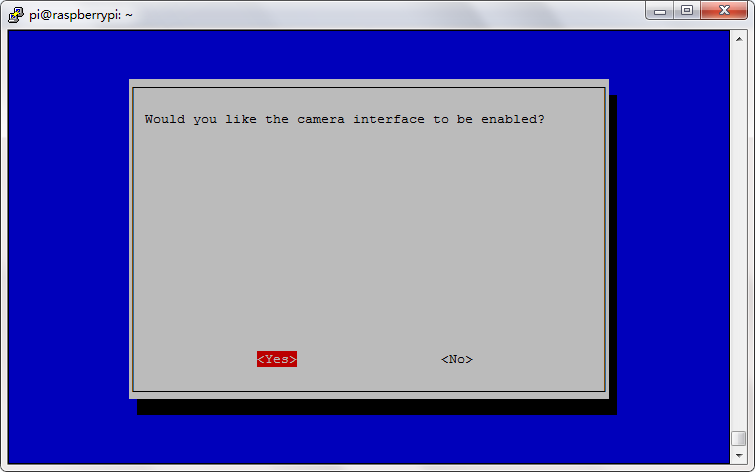
Étape 1 : Activez la caméra sur le Raspberry Pi en tapant la commande suivante :
sudo raspi-config
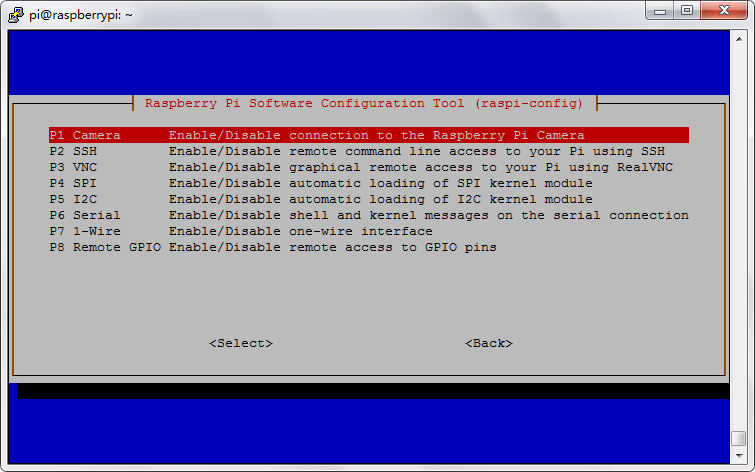
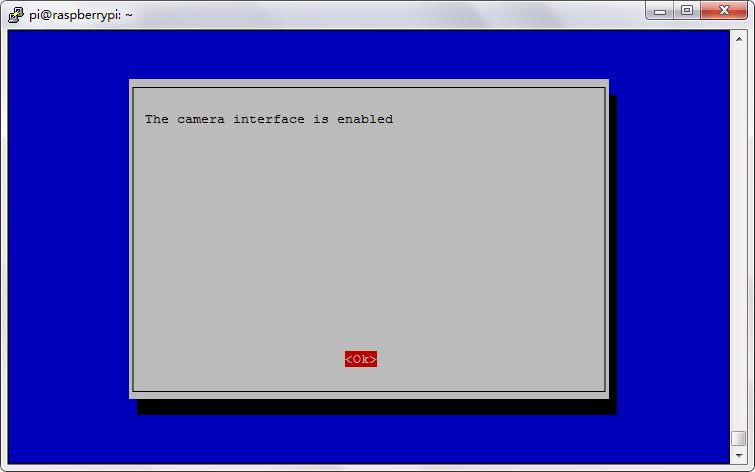
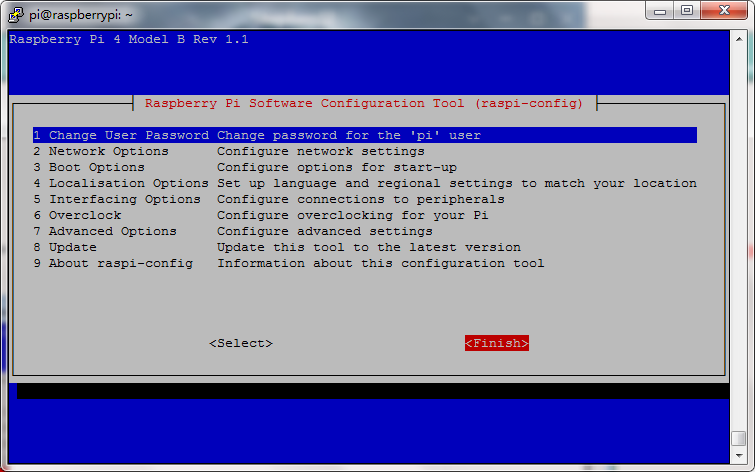
Ensuite, sélectionnez ->5 Options d’interface->P1 Caméra->Oui->Ok->Terminer (Veuillez redémarrer le Raspberry Pi selon les instructions.)
Étape 2 : Tapez la commande suivante pour installer le logiciel mjpeg-streamer :
Après avoir exécuté les commandes ci-dessus, le logiciel mjpeg-streamer est installé sur votre Raspberry Pi. C’est simple !
Étape 3 : Lancez le serveur mjpeg-streamer sur votre Raspberry Pi
Exécutez la commande suivante dans le terminal de votre Pi pour démarrer votre serveur mjpeg-streamer
bash startcam.sh
Ces messages signifient que votre serveur vidéo fonctionne sur le port 8899 de votre Pi.
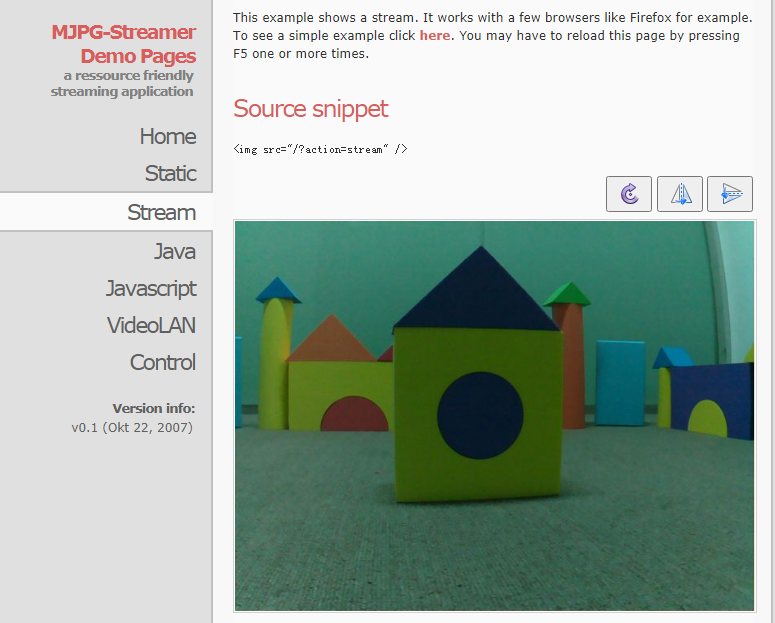
Étape 4 : Maintenant, vous pouvez utiliser votre navigateur pour tester la vidéo de surveillance. Veuillez visiter http://your_raspberry_pi_ip:8899 (dans notre exemple, http://192.168.0.34:8899),
cliquez sur le lien de flux ou visitez directement http://your_raspberry_pi_ip:8899/?action=stream, vous verrez la vidéo de surveillance.
Étape 5 : Ouvrez une nouvelle fenêtre de terminal et exécutez le code suivant pour installer le logiciel de la voiture robot contrôlée par caméra Web OSOYOO.
wget http://osoyoo.com/driver/servo-steer-car/piwebcar.sh
puis tapez la commande suivante :
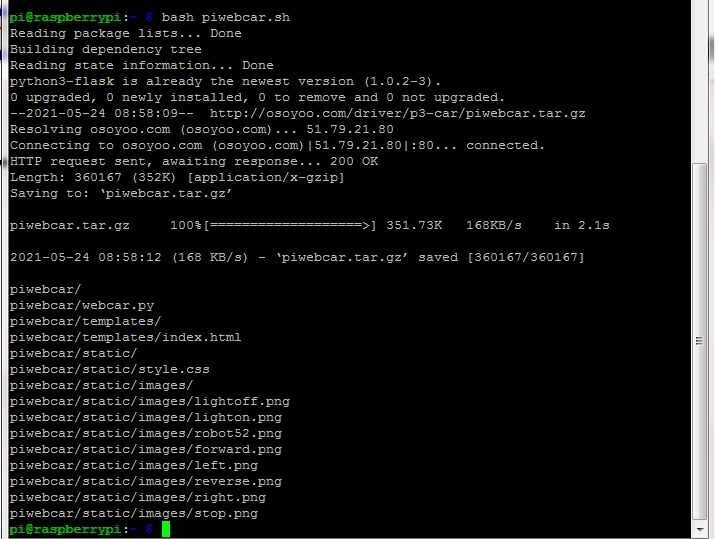
bash piwebcar.sh
Étape 6 : tapez la commande suivante pour accéder au dossier piwebcar
cd piwebcar
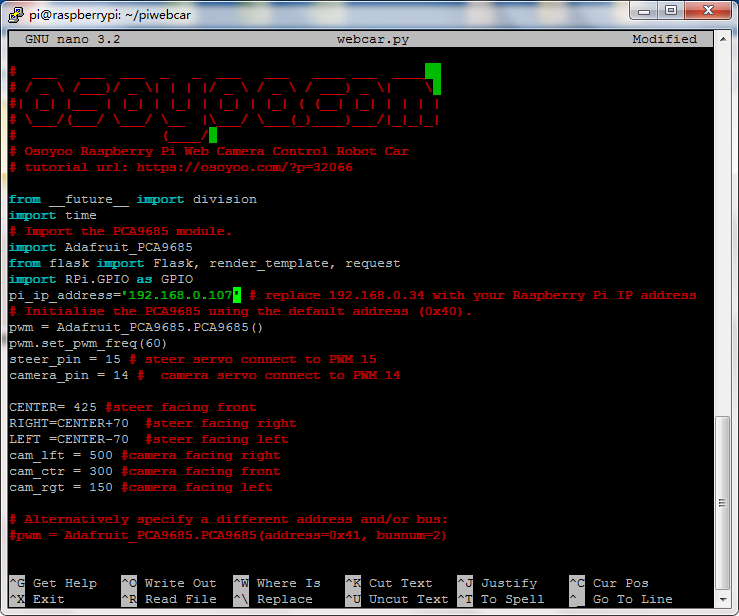
Étape 7 : Tapez ensuite la commande suivante pour modifier le fichier webcar.py
nano webcar.py
Remplacez l’adresse IP 192.168.0.34 à la ligne 15 par l’adresse IP de votre Raspberry Pi, puis appuyez sur “Ctrl” + “X”, puis sur “Y” pour enregistrer le fichier, et enfin appuyez sur “Entrée” pour quitter.
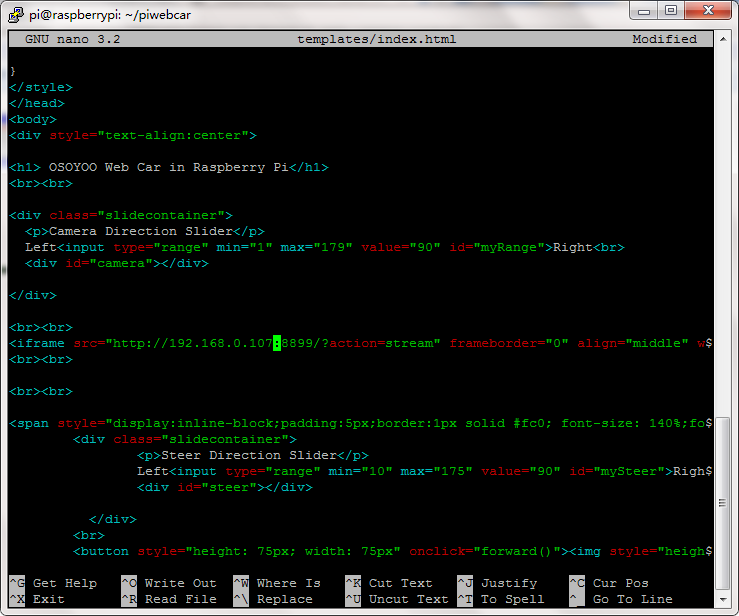
Étape 8 : Tapez ensuite la commande suivante pour modifier le fichier templates/index.html
nano templates/index.html
Veuillez changer l’adresse IP 192.168.0.34 à la ligne 34 par l’adresse IP de votre Raspberry Pi, puis appuyez sur “Ctrl” + “X”, puis sur “Y” pour enregistrer le fichier, et enfin appuyez sur “Entrée” pour quitter.
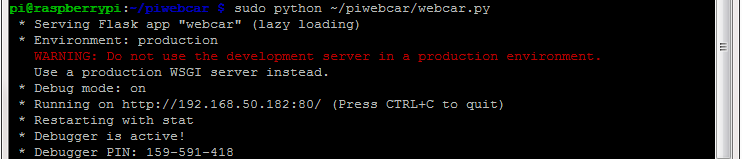
Étape 9 : Exécutez le code en tapant la commande.
sudo python ~/piwebcar/webcar.py
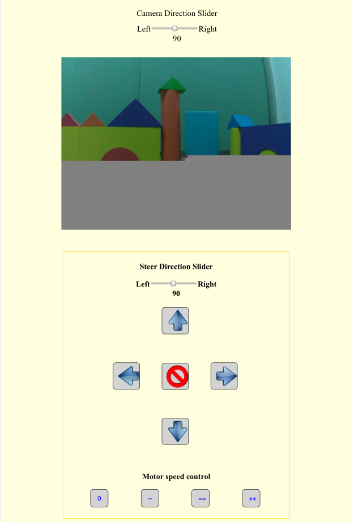
Étape 10 : Sur votre PC ou téléphone portable connecté au même réseau Wi-Fi que votre Raspberry Pi, ouvrez le navigateur et visitez http://your_RaspberryPi_ip_address, vous verrez l’interface utilisateur suivante :
Les boutons fléchés sont les touches de contrôle de direction, le bouton de cercle rouge au milieu est la touche STOP. Il y a quatre boutons de contrôle de vitesse en bas:
La touche 0 signifie la vitesse la plus lente
La touche – signifie la deuxième vitesse la plus lente
La touche = signifie la vitesse normale
La touche + signifie la vitesse la plus rapide
En haut de la page, il y a un curseur de direction de la caméra, vous pouvez déplacer le curseur pour faire pivoter le servomoteur et changer l’orientation de la caméra.
Avant le bouton flèche supérieure, il y a un curseur de direction de braquage, vous pouvez déplacer ce curseur pour faire tourner votre roue avant (comme tourner le volant lors de la conduite d’une voiture).
Référence : Marcelo Rovai : Serveur Web Python avec Flask et Raspberry Pi
https://towardsdatascience.com/python-webserver-with-flask-and-raspberry-pi-398423cc6f5d















 puis tapez la commande suivante :
puis tapez la commande suivante :