In questa lezione, ti mostreremo come utilizzare un’app mobile per controllare l’auto robot tramite il protocollo UDP. Il Raspberry Pi eseguirà un programma Python per ricevere pacchetti UDP dall’app.
Passaggio 1: Devi completare e testare la lezione 2 prima di proseguire con questa lezione, quindi installare un nuovo servomotore SG90 blu sulla posizione del servomotore. Collega il servomotore SG90 alla porta 14 della scheda OSOYOO PWM HAT.
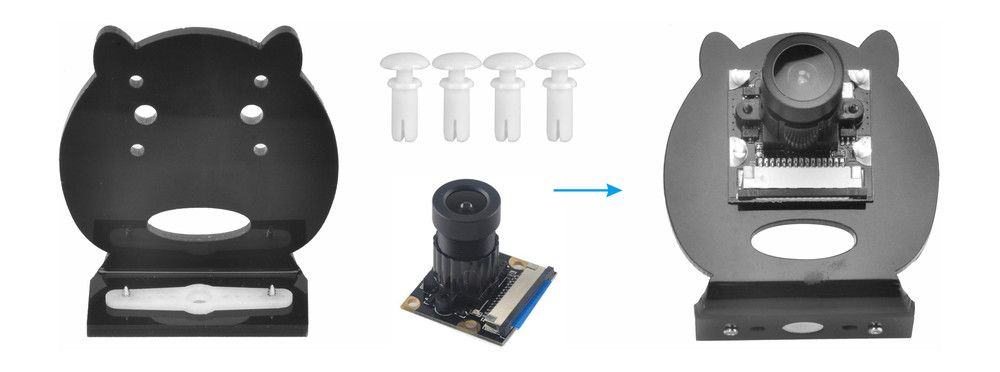
Passaggio 2: Scegli un supporto a fessura nel servomotore per attraversare il supporto della telecamera dall’alto verso il basso e fissalo con viti autofilettanti M1.5 * 6.
Passaggio 3: Installa la telecamera CSI sul supporto con 4 rivetti a spinta M2.
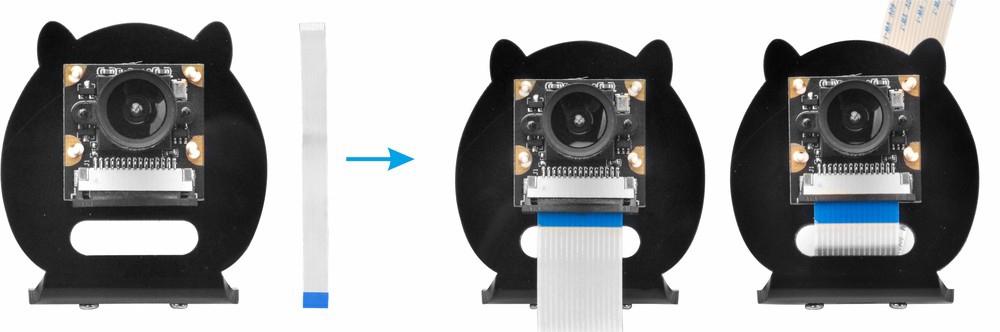
Passaggio 4: Collega la telecamera CSI al cavo ribbon CSI (presta attenzione ai collegamenti del cavo prima di installarlo).
Passaggio 5: Installa il supporto della telecamera sul servomotore con una vite autofilettante M2 * 4.
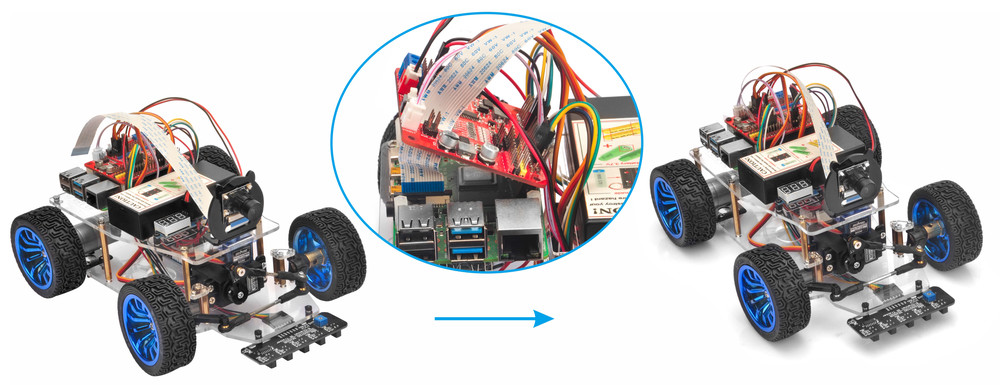
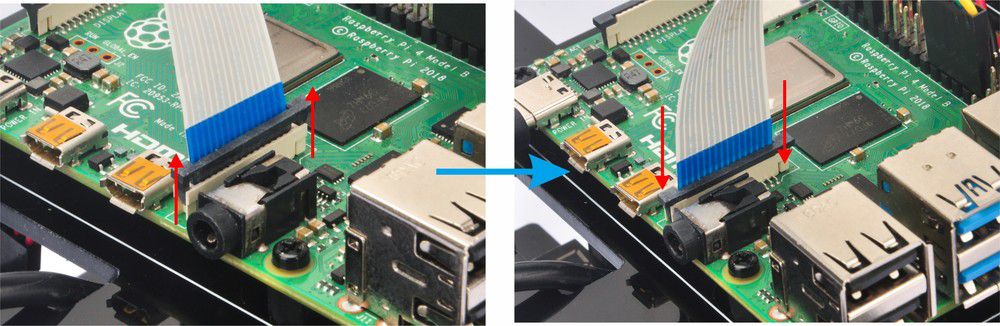
Il servomotore deve essere installato e collegato alla porta 15 della scheda OSOYOO PWM HAT. Collega la telecamera CSI allo slot CSI del Raspberry Pi con il cavo ribbon CSI (presta attenzione ai collegamenti del cavo prima di installarlo).
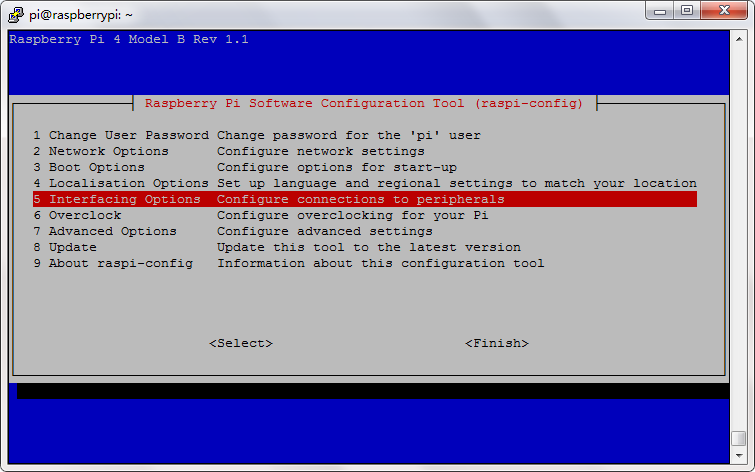
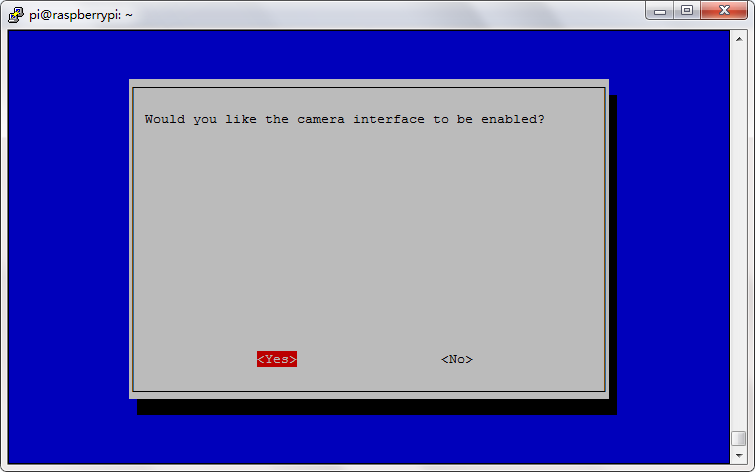
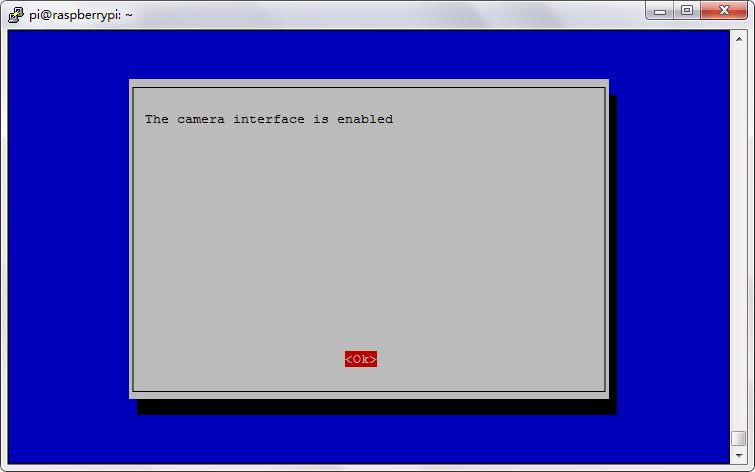
Passaggio 1: Abilita la telecamera nel Raspberry Pi digitando il seguente comando
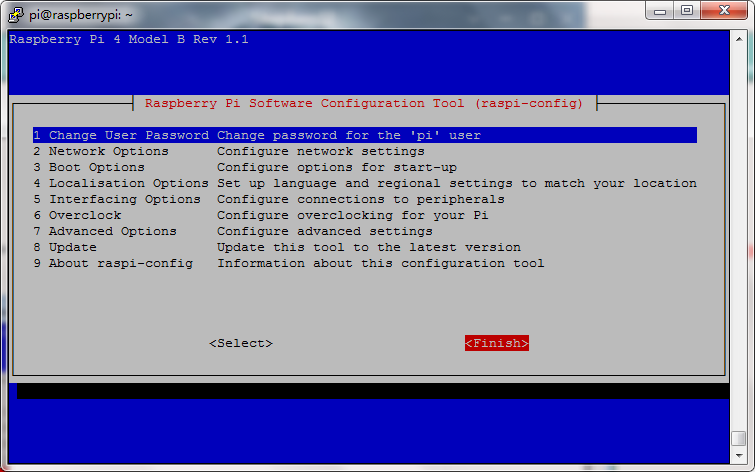
sudo raspi-config
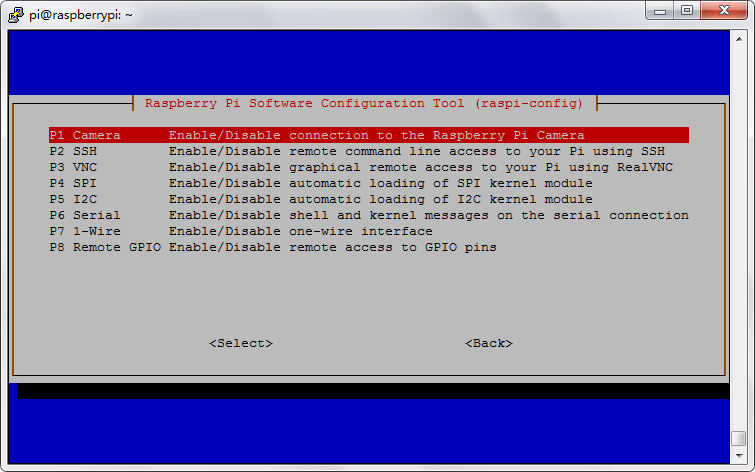
Quindi seleziona ->5 Opzioni di interfaccia->P1 Camera->Sì->Ok->Fine (riavvia il Raspberry Pi secondo le istruzioni.)
Passaggio 2: Digita il seguente comando per installare il software mjpeg-streamer:
Dopo aver eseguito i comandi precedenti, il software mjpeg-streamer viene installato nel tuo Raspberry Pi. Semplice, vero?
Passaggio 3: Avvia il server mjpeg-streamer nel tuo Raspberry Pi
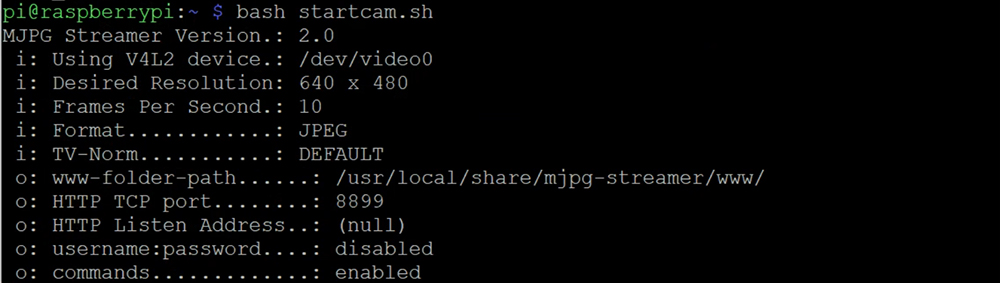
Esegui il seguente comando nel terminale del tuo Pi per avviare il server mjpeg-streamer
bash startcam.sh
Questi messaggi indicano che il tuo server video è in esecuzione sulla porta 8899 del tuo Pi.
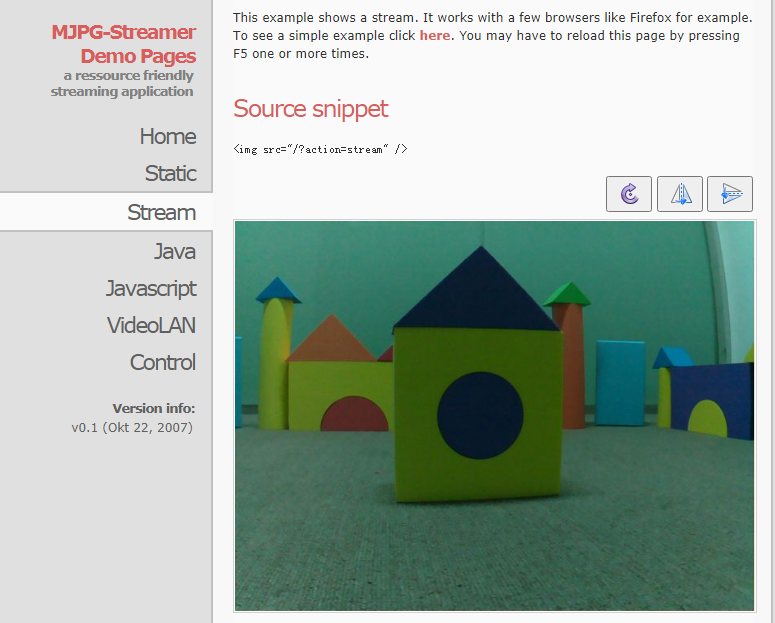
Passaggio 4: Ora puoi utilizzare il browser per testare il video di sorveglianza. Visita http://your_raspberry_pi_ip:8899 (in our sample case http://192.168.0.34:8899),
clicca sul link stream o visita direttamente http://your_raspberry_pi_ip:8899/?action=stream, vedrai il video di sorveglianza.
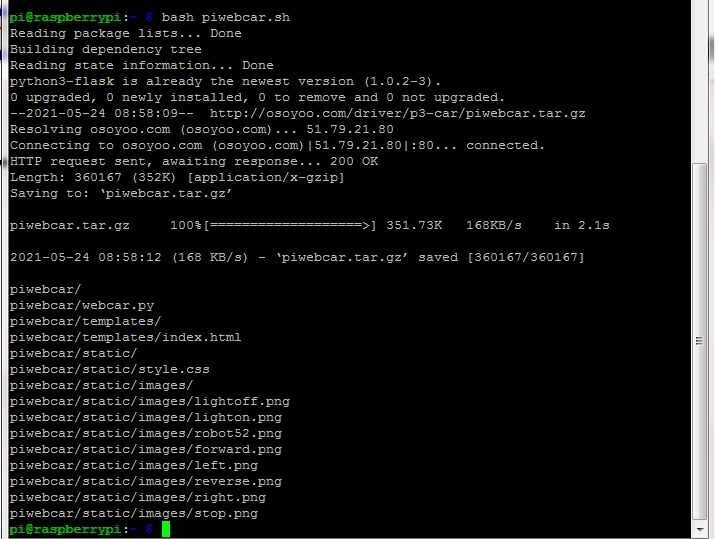
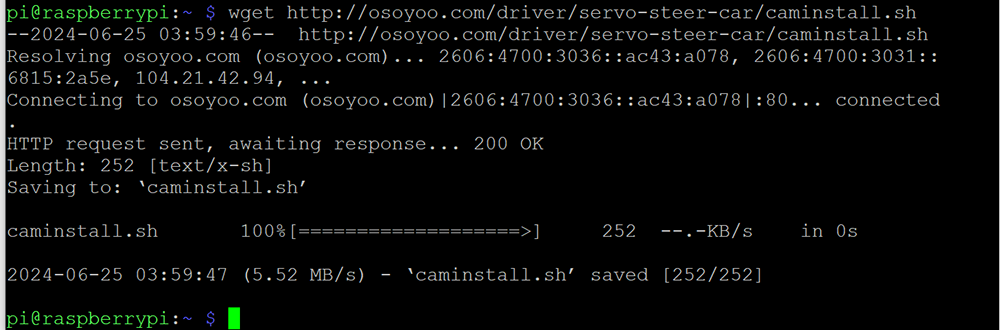
Passaggio 5: Apri una nuova finestra del terminale e esegui il seguente codice per installare il software dell’auto robot controllata dalla telecamera web OSOYOO.
wget http://osoyoo.com/driver/servo-steer-car/piwebcar.sh
e quindi digita il seguente comando:
bash piwebcar.sh
Passaggio 6: digita il seguente comando per accedere alla cartella piwebcar
cd piwebcar
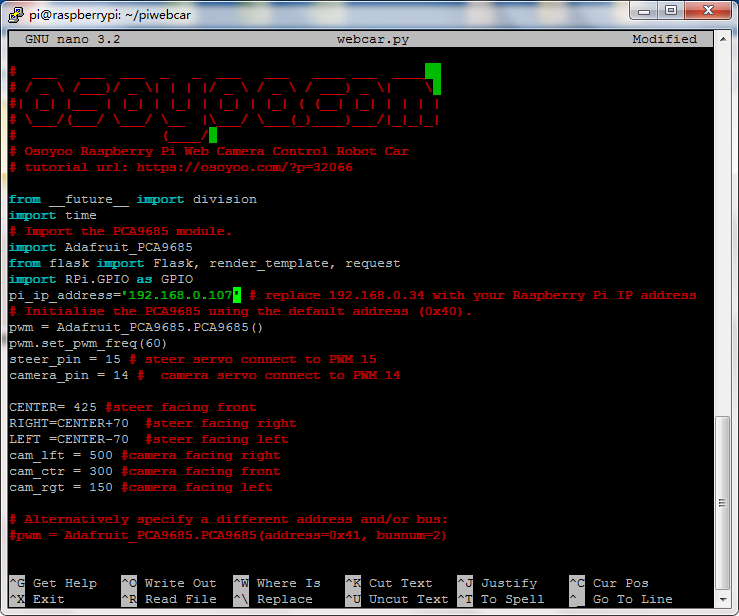
Passaggio 7: quindi digita il seguente comando per modificare il file webcar.py
nano webcar.py
Sostituisci l’indirizzo IP 192.168.0.34 nella riga 15 con l’indirizzo IP del tuo Raspberry Pi, quindi premi “Ctrl” + “X” e poi “Y” per salvare il file e infine premi “invio” per uscire.
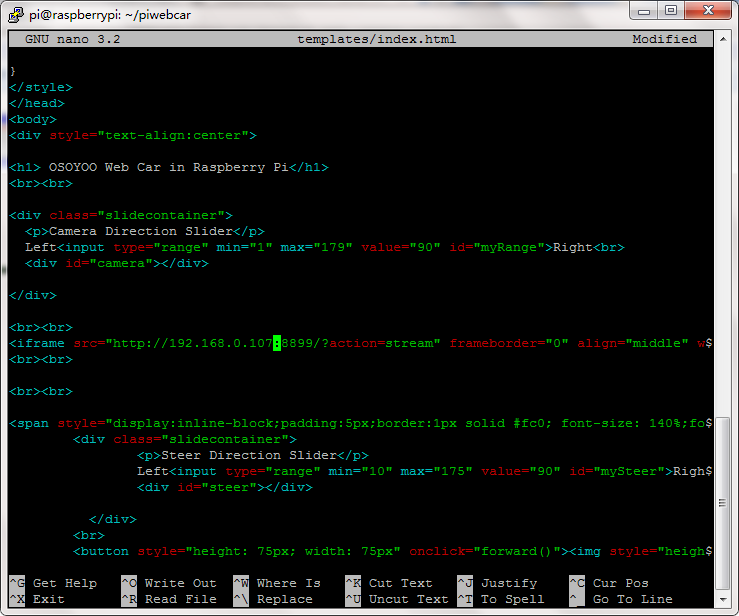
Passaggio 8: quindi digita il seguente comando per modificare il file templates/index.html
nano templates/index.html
Modifica l’indirizzo IP 192.168.0.34 nella riga 34 con l’indirizzo IP del tuo Raspberry Pi, quindi premi “Ctrl” + “X” e poi “Y” per salvare il file e infine premi “invio” per uscire.
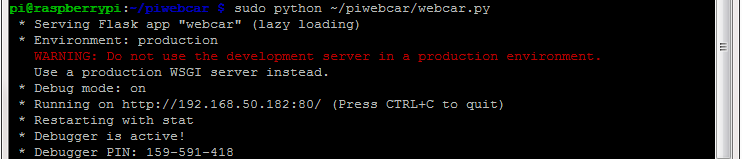
Passaggio 9: Esegui il codice digitando il comando
sudo python ~/piwebcar/webcar.py
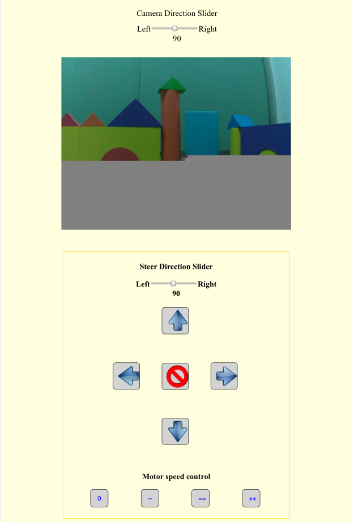
Passaggio 10: Nel tuo PC o telefono cellulare che si trova nella stessa rete Wi-Fi del tuo Raspberry Pi, apri il browser e visita http://your_RaspberryPi_ip_address, vedrai l’interfaccia utente seguente:
I pulsanti con le frecce sono i tasti di controllo della direzione, il pulsante circolare rosso al centro è il tasto STOP. In fondo ci sono quattro pulsanti di controllo della velocità:
Il pulsante 0 significa la velocità più lenta
Il pulsante – significa la seconda velocità più lenta
Il pulsante = significa velocità normale
Il pulsante + significa velocità più veloce
Nella parte superiore della pagina c’è uno slider per la direzione della telecamera, puoi spostare lo slider per ruotare il servomotore e cambiare l’orientamento della telecamera.
Prima del pulsante Freccia superiore, c’è uno slider per la direzione di sterzata, puoi spostare questo slider per ruotare la ruota anteriore (come ruotare il volante quando si guida una macchina).
Riferimento: Marcelo Rovai : Python WebServer With Flask and Raspberry Pi
https://towardsdatascience.com/python-webserver-with-flask-and-raspberry-pi-398423cc6f5d















 e quindi digita il seguente comando:
e quindi digita il seguente comando: