En esta lección, haremos un proyecto de conducción automática de seguimiento de línea. Agregaremos un módulo de sensor de seguimiento de 5 pines al Auto Robot integrado en la Lección 1. El software de esta lección leerá los datos del módulo de sensor de seguimiento de 5 puntos y guiará automáticamente al automóvil inteligente para que se mueva a lo largo de la linea de seguimiento negra en el suelo blanco.
La Lección 1 debe completarse antes de realizar este proyecto de seguimiento de líneas.
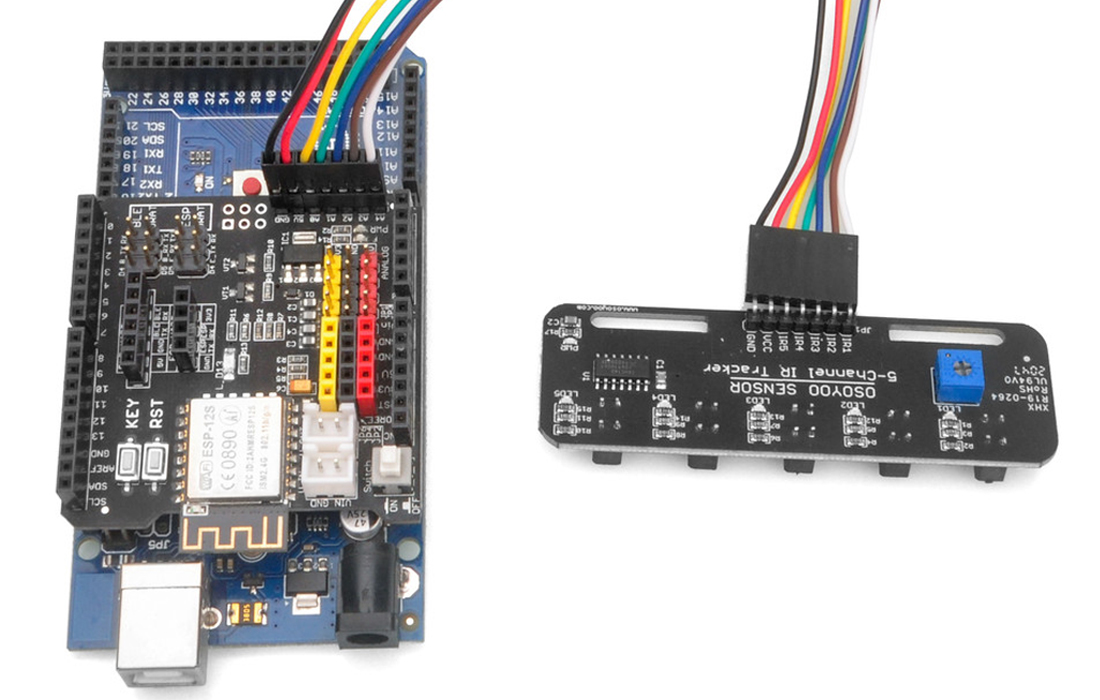
– Chasis para Ruedas Mecanum OSOYOO de Auto Robot x1 – Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 y ruedas derechas x2) – Placa OSOYOO Mega2560 totalmente compatible con Arduino UNO/Mega2560 x1 – Escudo OSOYOO Uart Wifi x1 – Placa controladora OSOYOO modelo Y x1 – Medidor de voltaje OSOYOO x1 – Módulo de sensor de seguimiento OSOYOO de 5 pines x1 – Caja de batería OSOYOO x1 – Cable de puente OSOYOO hembra a hembra de 3 pines x1 – Cable de puente OSOYOO macho a hembra de 6 pines x2 – Cable de puente OSOYOO hembra a hembra de 7 pines x1 – Cable de puente OSOYOO XH.25 hembra a hembra de 2 pines x1 – Baterías 18650 (3.7V ) x2 – Cargador de batería x1
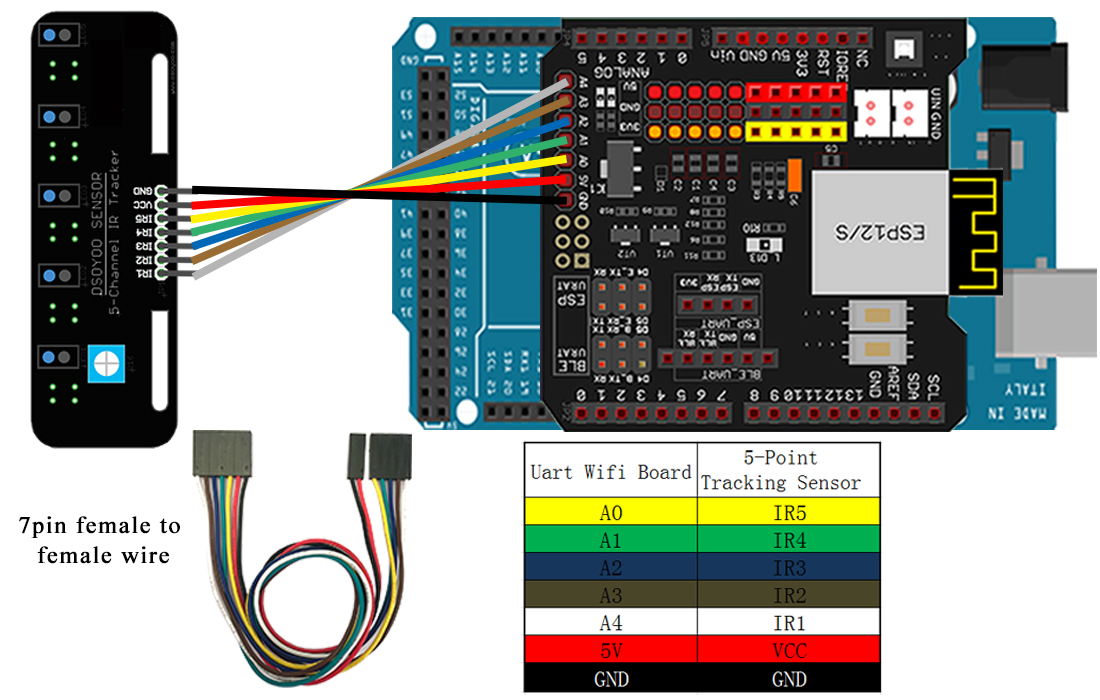
1) Mantenga todas las conexiones de la Lección 1 tal como están. (Recuerde: NO retire ningún cable existente instalado en la Lección 1). 2) Conecte el pin GND-VCC del módulo del sensor de seguimiento a GND-5V del escudo OSOYOO Uart WiFi V1.3; conecte los pines IR1, IR2, IR3, IR4, IR5 a A1, A2, A3, A4, A5 respectivamente con un cable hembra a hembra de 7 pines y de 25 cm como se muestra en la siguiente foto:
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descargue el IDE Arduino desde https://www.arduino.cc/en/Main/Software?setlang=en, y luego instale el software.
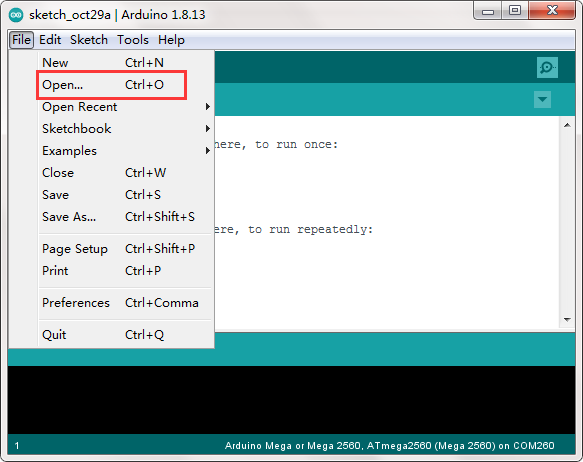
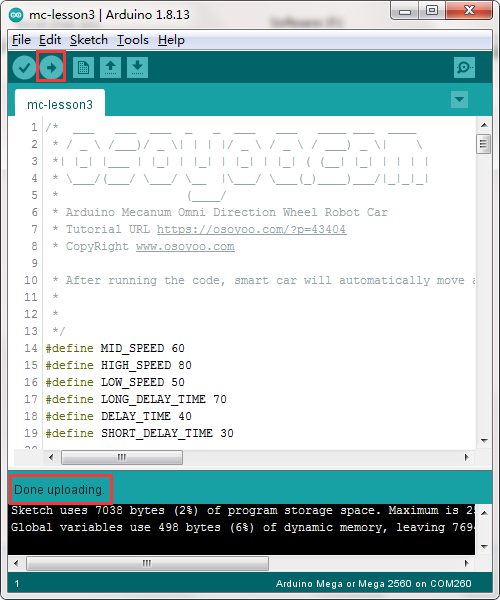
Paso 3: Conecte la placa Mega2560 a la PC con un cable USB, abra Arduino IDE -> haga clic en archivo -> haga clic en Abrir -> elija el código “lesson3.ino” en la carpeta Lesson3, cargue el código en Arduino.
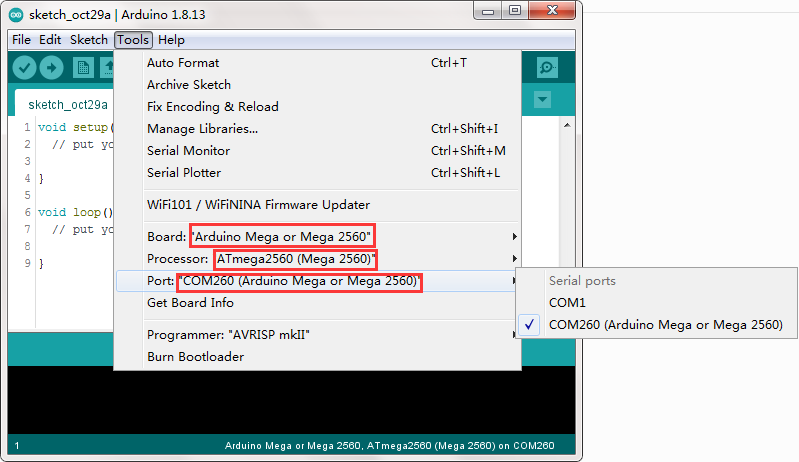
Paso 4: Elija la placa/puerto correspondiente para su proyecto y cargue el código en la placa.
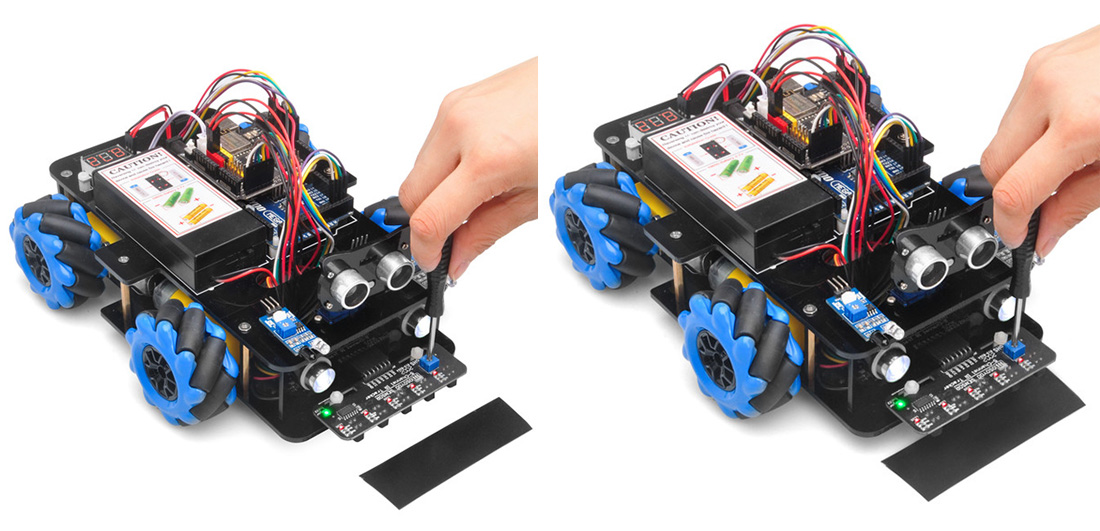
Ajuste la sensibilidad de los módulos de sensores de seguimiento.
Encienda la caja de la batería, sostenga el robot y ajuste el potenciómetro en el sensor de seguimiento con un destornillador tipo Philips hasta que obtenga el mejor estado de sensibilidad: la señal indica que la luz LED se encenderá cuando el sensor esté por encima de la pista negra y la señal LED se apagará cuando el sensor esté sobre un fondo blanco.
Pruebas finales
Prepare una pista para el Robot (el ancho de la línea negra es más de 20 mm y menos de 30 mm) en fondo blanco. Tenga en cuenta que el ángulo de giro de la pista no puede ser demasiado agudo, de lo contrario, el automóvil se saldrá de la pista.
Encienda el robot y coloque el centro del módulo del sensor de seguimiento hacia la línea negra, luego el robot se moverá a lo largo de la línea negra.