En esta lección, usamos Python para programar nuestro auto robot Raspberry Pi para que conduzca automáticamente a lo largo de una línea negra en fondo blanco. Utilizaremos cinco sensores de seguimiento IR para detectar la línea.
Aprenderá cómo Python lee datos digitales de pines GPIO.
No.
Imagen
Dispositivo
Qty.
Accesorios
Enlace
1
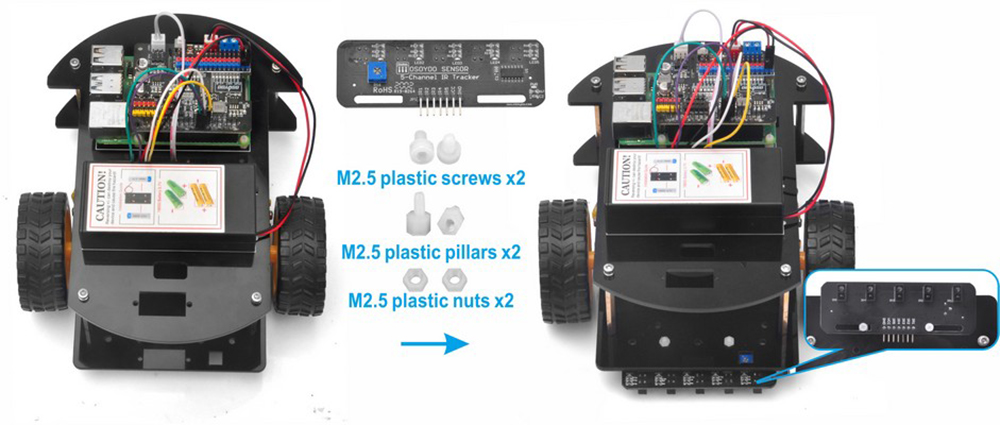
Módulo sensor de seguimiento
1
Tornillo de plástico M2.5 x 2
Tuerca de plástico M2.5 x2
Pilar de plástico M2.5 x 2
Paso 2: Instale módulos de sensor de seguimiento debajo del chasis inferior del automóvil con tornillos de plástico M2.5 de 2 piezas, pilares de plástico M2.5 y tuercas de plástico M2.5.
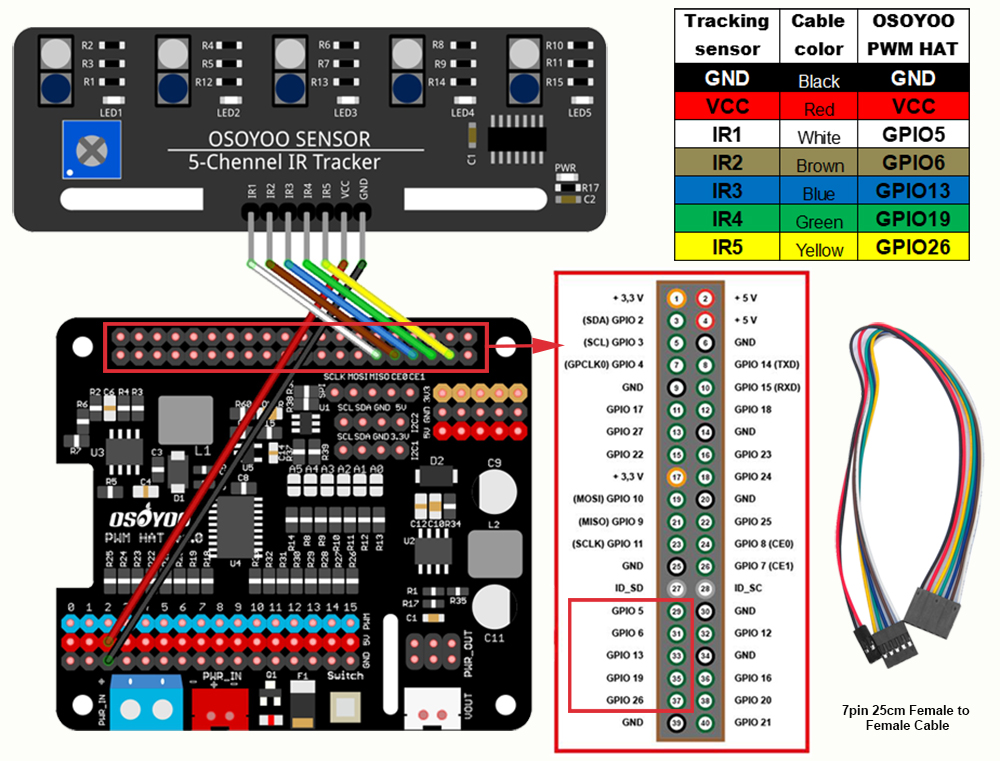
Paso 1: Conecte el pin GND-VCC del módulo sensor de seguimiento al OSOYOO PWM HAT con un cable hembra a hembra de 7 pines de 25 cm, como muestra la siguiente foto (recuerde: NO retire los cables existentes instalados en la Lección 1):
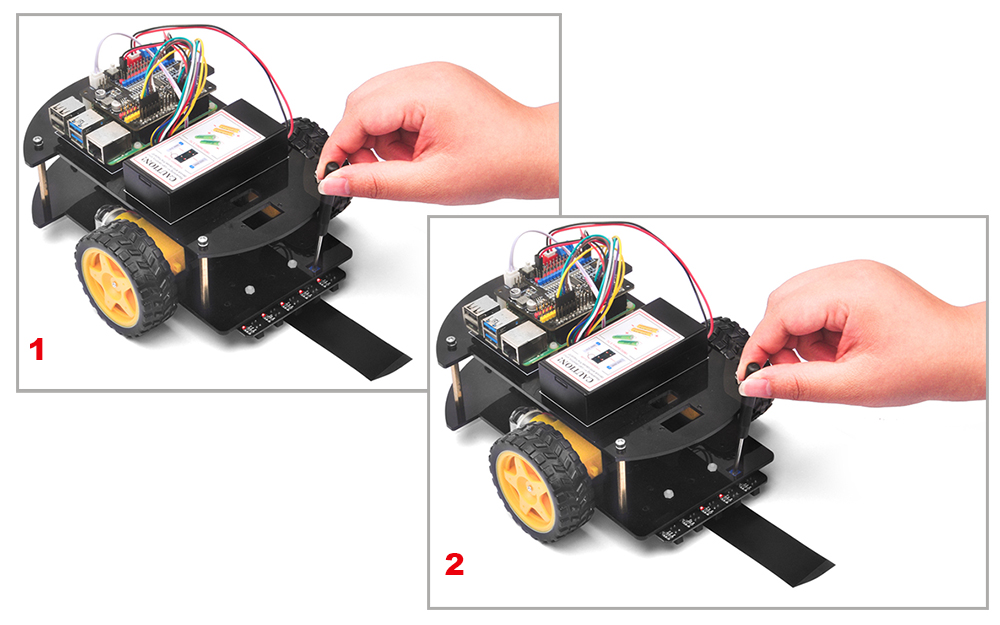
Paso 2: Ajuste la sensibilidad de los módulos del sensor de seguimiento.
Encienda el automóvil, prepare una línea de pista negra sobre fondo blanco y encienda el automóvil.
Coloque el automóvil en la pista negra y en el suelo blanco repetidamente para ajustar la sensibilidad del módulo de seguimiento.
Ajuste el potenciómetro en el sensor de seguimiento y asegúrese de que el LED indicador correspondiente estará encendido cuando el sensor de seguimiento esté sobre negro, y el LED indicador correspondiente se apagará cuando el sensor de seguimiento esté sobre blanco.
Paso 1: Asegúrese de haber instalado rpi.gpio, la biblioteca adafruit-pca9685 y habilite I2C en la lección 1.
Paso 2: Encienda el coche robot, luego descargue el código python escribiendo el siguiente comando en su terminal Raspberry Pi:













 En esta lección, usamos Python para programar nuestro auto robot Raspberry Pi para que conduzca automáticamente a lo largo de una línea negra en fondo blanco. Utilizaremos cinco sensores de seguimiento IR para detectar la línea.
En esta lección, usamos Python para programar nuestro auto robot Raspberry Pi para que conduzca automáticamente a lo largo de una línea negra en fondo blanco. Utilizaremos cinco sensores de seguimiento IR para detectar la línea.