Hay muchas maneras de controlar Raspberry Pi Robot Car a través de Internet. En este proyecto, presentamos un método popular, que es instalar un servidor web en Raspberry Pi. En otras palabras, podemos convertir nuestra placa Pi en un sitio web y usar la aplicación de navegación o teléfono celular para intercambiar datos con Raspberry Pi.
No.
Imagen
Dispositivo
Qty.
Accesorios
Enlace
1
Módulo sensor de seguimiento
1
Tornillo de plástico M2.5 x 2
Tuerca de plástico M2.5 x2
Pilar de plástico M2.5 x 2
Después de ejecutar los comandos anteriores, instalará la biblioteca python Flask y creará automáticamente un directorio llamado pi-webserver y dos subdirectorios en pi-webserver que son static y templates, la estructura es la siguiente:
El directorio pi-webserver almacenará nuestro archivo de código python, el directorio estático almacenará el archivo CSS y la carpeta de plantillas almacenará archivos HTML. Si no sabe qué es el archivo HTML, CSS, no importa.
Paso 4) Ejecute el código escribiendo el siguiente comando:
sudo python ~/pi-webserver/pi-webserver.py
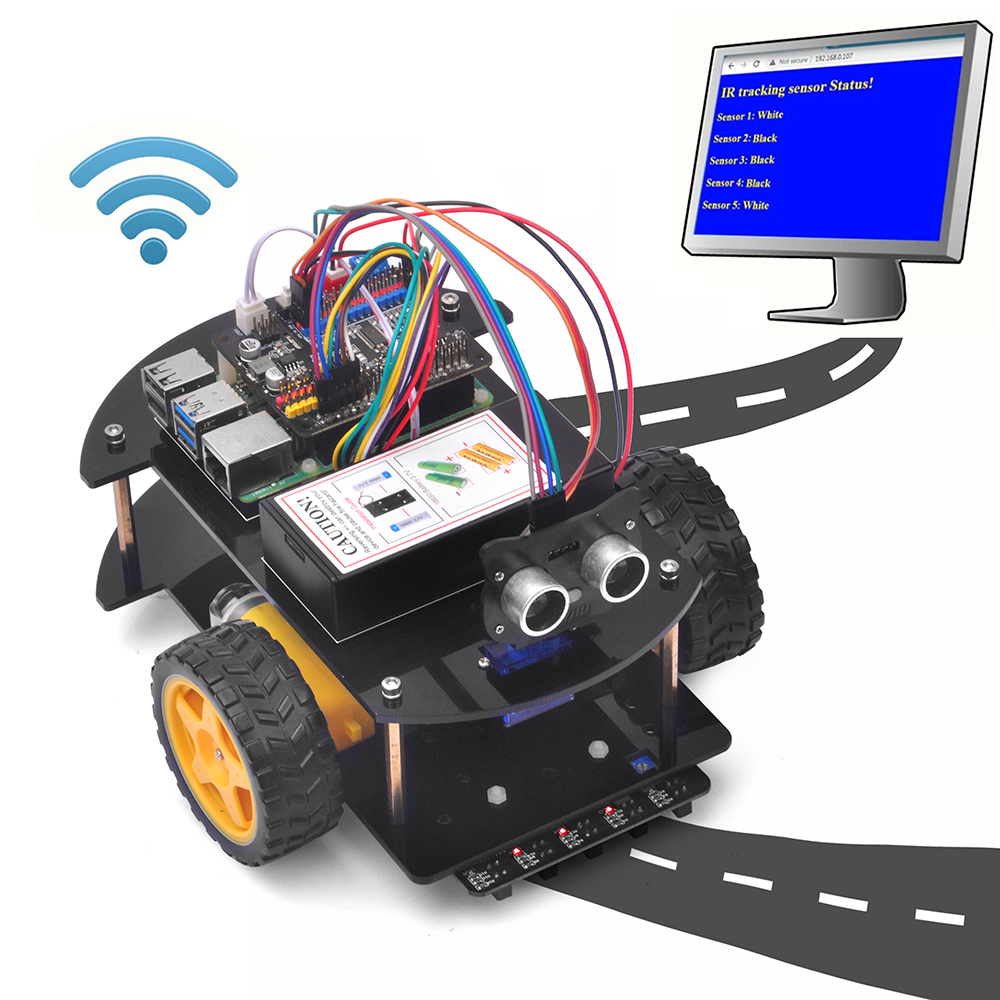
Paso 5) Se iniciará su servidor web python flask. Ahora en su PC o teléfono celular que es la misma red Wi-Fi de su Raspberry Pi, abra el navegador y visite http://your_raspberry_pi_ip_address:5000 (en mi caso http://192.168.0.107:5000), verá el estado de sus 5 sensores de seguimiento en su navegador:
El estado del sensor se actualizará cada 5 segundos, por lo que si coloca la línea negra debajo de otros sensores, el valor del sensor en la página web anterior cambiará después de 5 segundos.