En esta lección, le enseñaremos cómo usar una aplicación móvil para controlar un automóvil robot a través del protocolo UDP. La Raspberry Pi ejecutará un programa Python para obtener un paquete UDP de la aplicación.
Aprenderá cómo usar Python para obtener datos remotos (paquete UDP) desde la aplicación móvil.
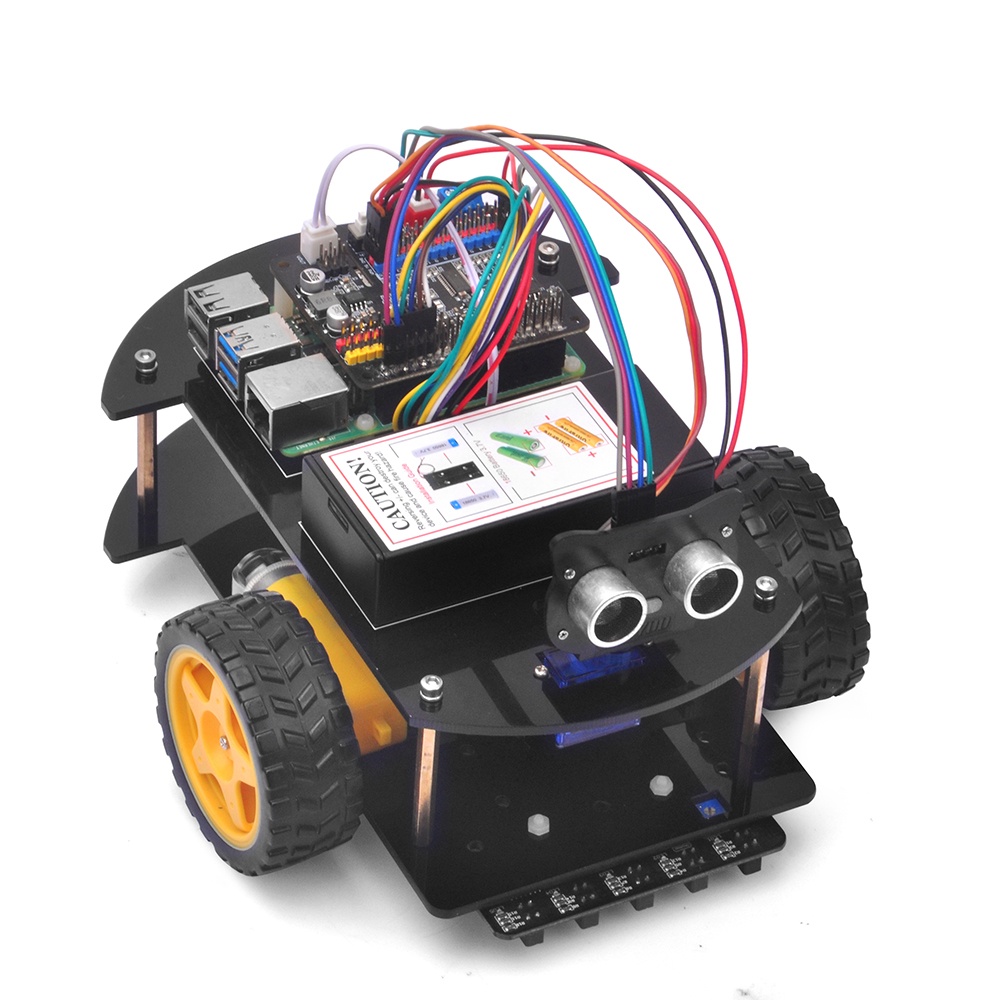
Paso 1: Instale el marco básico del automóvil inteligente según la lección 3. Si no instala el módulo del sensor de seguimiento, complete la instalación en la lección 2.
Paso 1) Asegúrese de haber instalado rpi.gpio y la biblioteca adafruit-pca9685, y habilite I2C en la lección 1.
Paso 2) Encienda el coche robot y escriba el siguiente comando para descargar el código de ejemplo:
Paso 3) Escriba el siguiente comando para ejecutar el código de ejemplo:
python picar-udp-control4.py
Después de que Python se está ejecutando, su automóvil está esperando el comando de su teléfono celular.
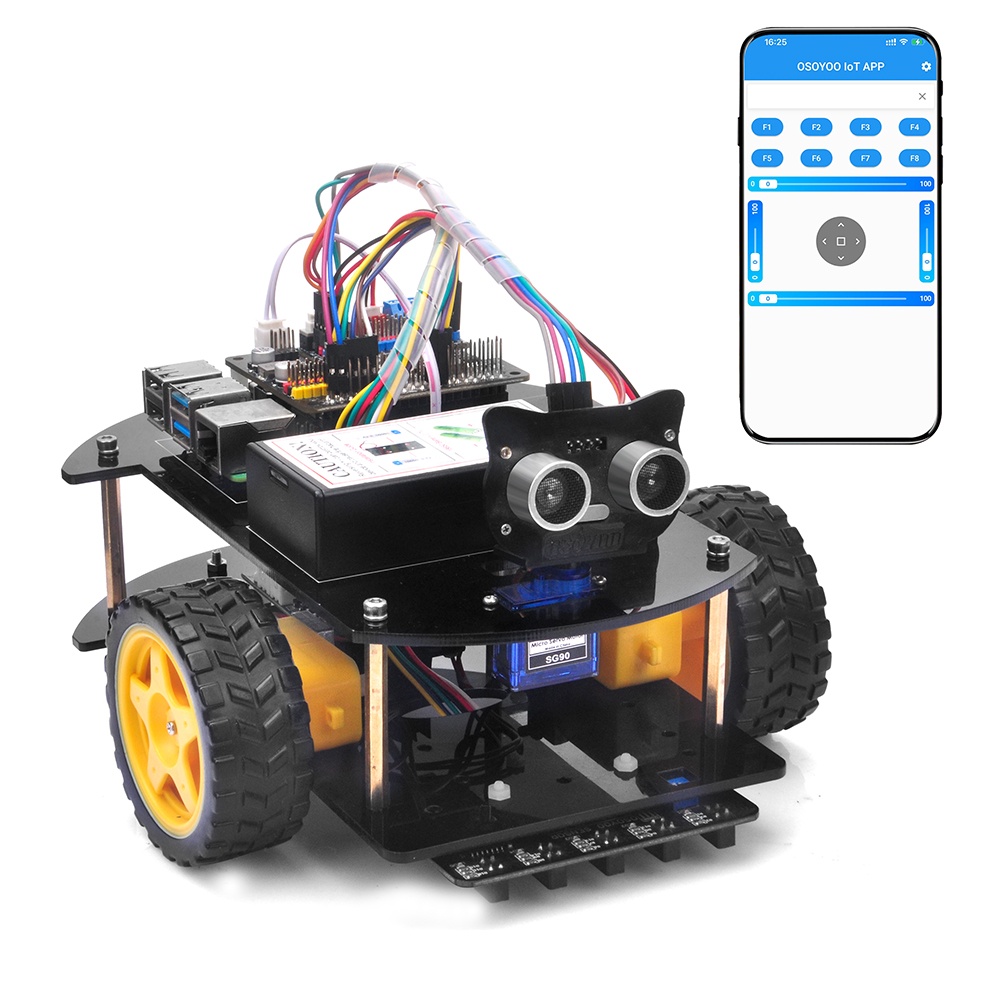
Paso 4) Descargar OSOYOO Wi-Fi UDP Robot Car control APP En Google Play o Apple Store, busque las palabras clave “OSOYOO IoT UDP Robot APP”, encontrará una aplicación de icono rojo de la siguiente manera (Nota: Si no encuentras esta APP en Google Play, puedes descargar directamente la APP desde el siguiente enlace:https://osoyoo.com/driver/udp-app.apk):
Paso 5) Conecte su teléfono con el mismo router Wi-Fi SSID de Raspberry Pi que utiliza. Abra la aplicación, haga clic en “icono de configuración (1)” para ingresar a la interfaz de usuario de configuración, ingrese su Raspberry Pi IP address y Port a 8888, haga clic en Save, luego haga clic en el icono de retroceso (5) para volver a controlar la interfaz de usuario de la siguiente manera:
Paso 6)
Ahora, coloque el automóvil en el suelo y puede hacer clic en las teclas de dirección < > ^ v para que el automóvil se mueva. Uso || Tecla de pausa para detener el movimiento del automóvil.
Si hace clic en la tecla de obstáculo (F8), el automóvil evitará obstáculos de conducción automática similar a la lección 3
Si hace clic en la tecla de seguimiento (F7), el automóvil hará el seguimiento de la conducción automática de enlaces similar a la lección 2
Nota: F1 ~ F6 son otras funciones de desarrollo en el futuro.
Preguntas frecuentes sobre la aplicación IoT UDP y el código de boceto:
P1)¿Cómo ajustar la velocidad del coche robot? R: Si desea cambiar el rendimiento de velocidad del coche robot, cambie los valores siguiendo los parámetros de la línea 19-21 en picar-udp-control.py archivo:
high_speed = 4000 # Max pulse length out of 4096
mid_speed = 2000 # Max pulse length out of 4096
low_speed = 1000 # Max pulse length out of 4096
Pregunta 2)¿Qué sucedió cuando presiona botones en OSOYOO IoT UDP Robot APP? R: Cuando presiona un botón de la aplicación, la aplicación enviará un mensaje de una sola letra a través del protocolo UDP al dispositivo de destino Raspberry Pi
Botón
Mensaje UDP
F1
/
F2
/
F3
/
F4
/
F5
/
F6
/
▲
Avanzar
▼
Atrás
►
Derecha
◄
Izquierda
cuadrado
Parar
F7
Seguimiento
F8
obstáculo
P3)¿Cómo maneja el programa Python Raspberry Pi el comando UDP?
La línea 290 a 318 mientras que el bucle recibe datos UDP de APP y se los da a cur_status viables, la función ticker en la línea 266 – 280 maneja el cur_status :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Por ejemplo, cuando se presiona la tecla APP ▲, cur_status valor es A, luego la función ticker() call forward(mid_speed,mid_speed) función para hacer que el automóvil avance.