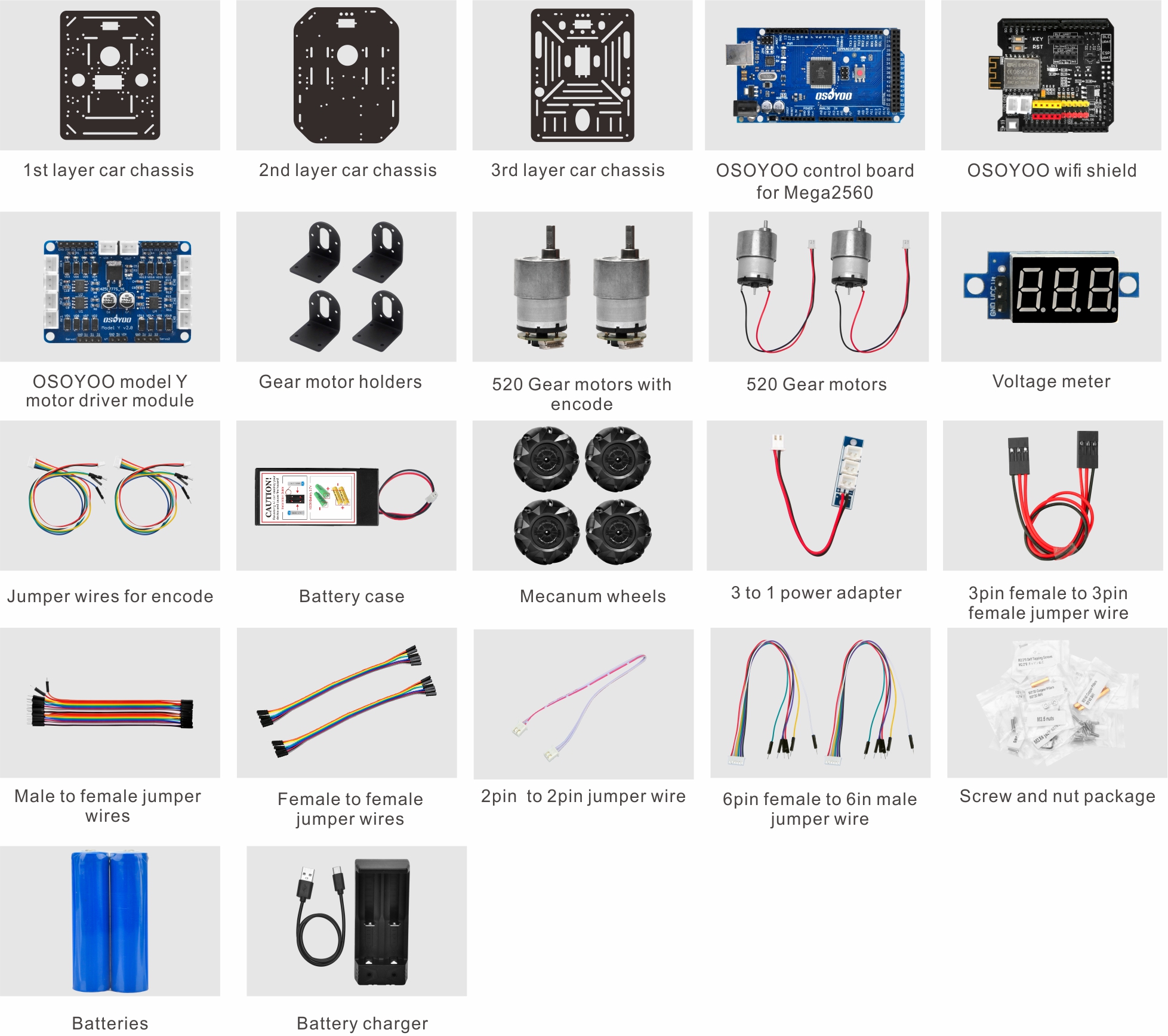
El kit de robot OSOYOO FlexiRover para Arduino Mega2560 es una plataforma robótica versátil diseñada para usuarios avanzados. Incluye una placa compatible con Mega2560 y un módulo de expansión WiFi para el control remoto y la monitorización. El kit está equipado con cuatro potentes motores 520, y los motores traseros incorporan encoders para un control preciso, lo que lo hace ideal para movimientos exactos en aplicaciones robóticas.
Características principales:
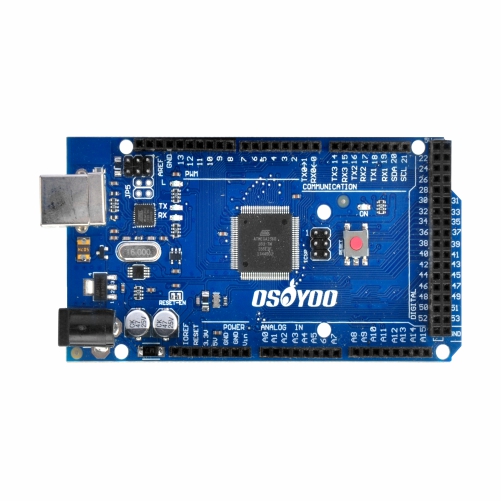
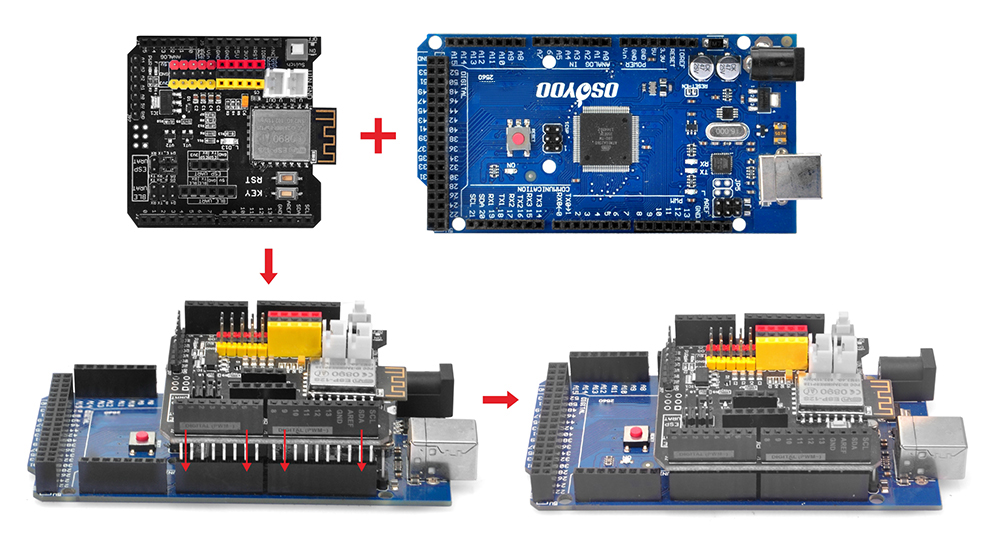
Placa Mega2560 con WiFi: La placa Arduino compatible con Mega2560, combinada con un módulo WiFi, permite conectividad inalámbrica para control remoto, aplicaciones IoT y transmisión de datos, ampliando el alcance de los proyectos robóticos.
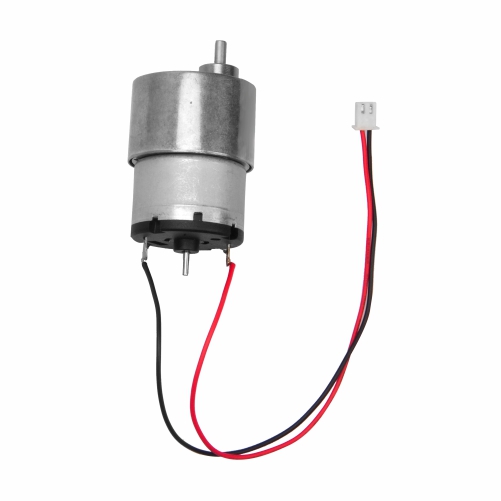
Motores 520 con encoders: Los motores 520 garantizan un movimiento suave, mientras que los encoders traseros ofrecen un control preciso de velocidad y dirección, perfecto para tareas de navegación y evasión de obstáculos.
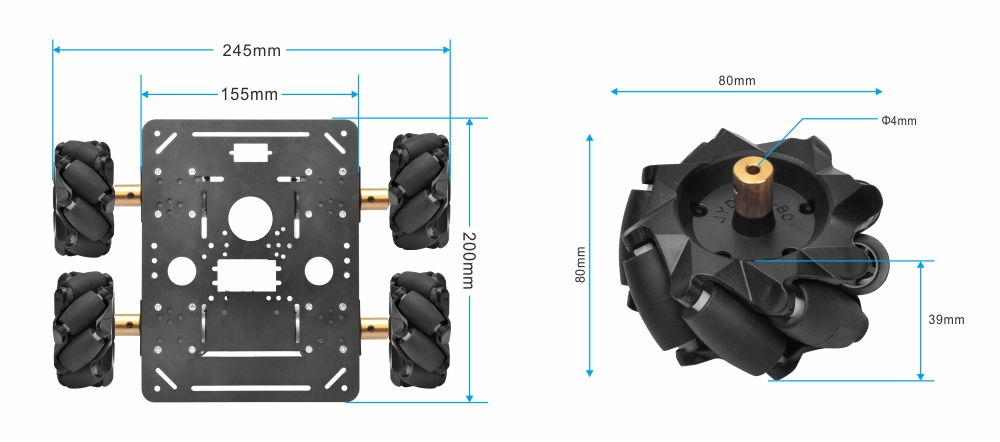
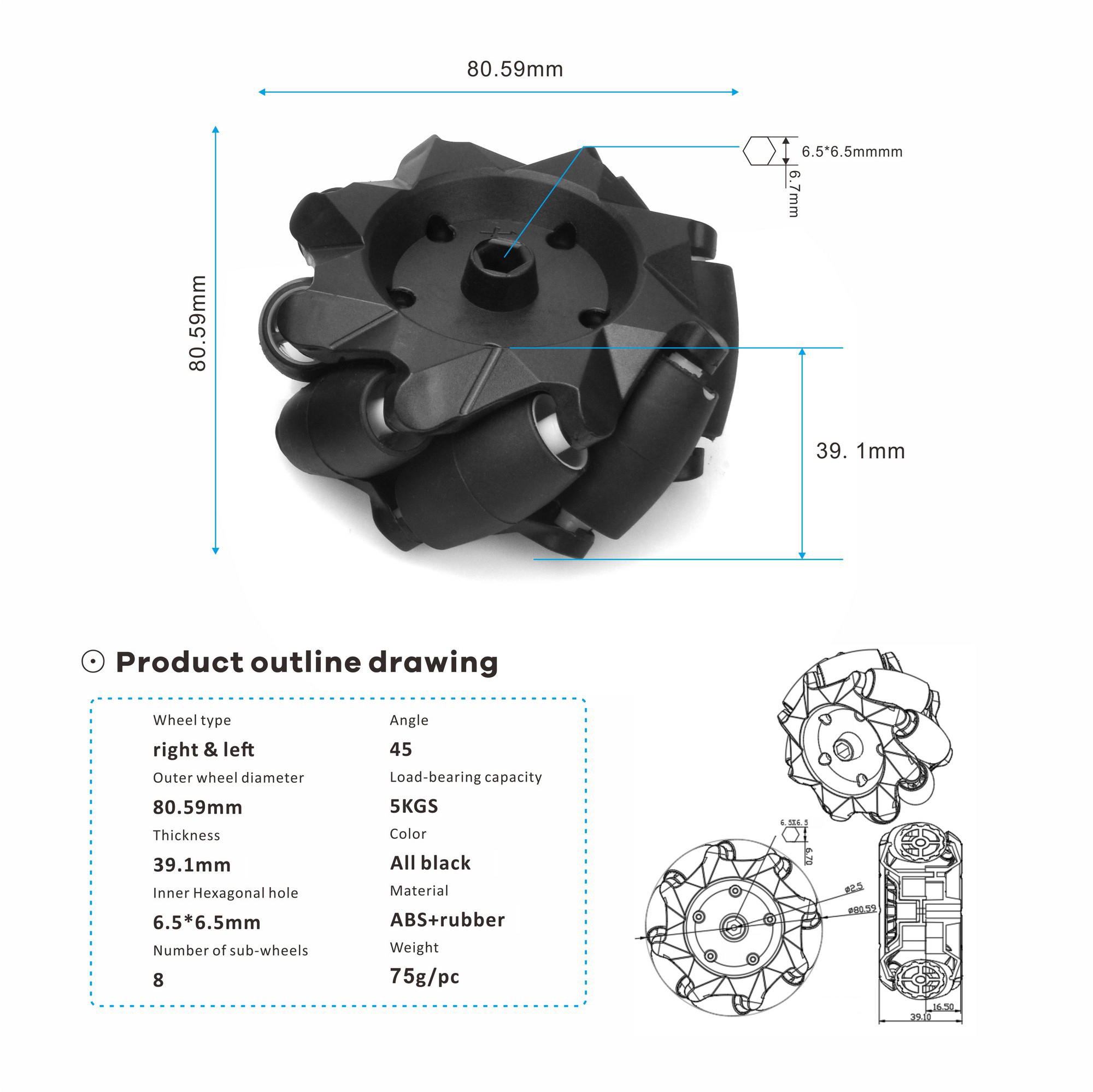
Ruedas Mecanum para movimiento omnidireccional: Las ruedas Mecanum incluidas permiten que el robot se mueva en cualquier dirección, lo que lo hace versátil para entornos complejos y aplicaciones que requieren una navegación ágil.
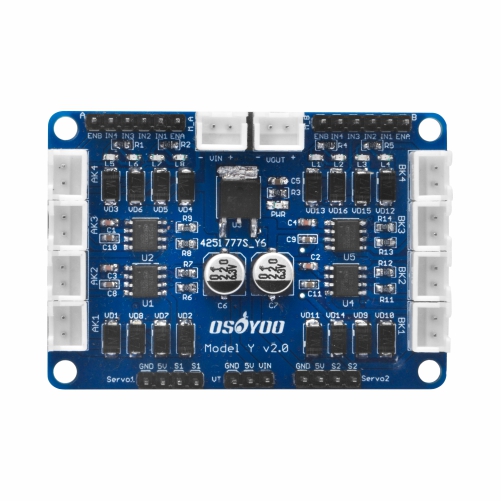
Placa controladora de motores para tracción a 4 ruedas: La placa controladora OSOYOO Model Y controla hasta cuatro motores de forma independiente, lo que permite esquemas de control avanzados y mecanismos de conducción flexibles.
Chasis personalizable: El chasis cuenta con orificios pretaladrados para montar componentes adicionales como sensores, brazos o cámaras, lo que permite a los usuarios personalizar su robot para tareas específicas.
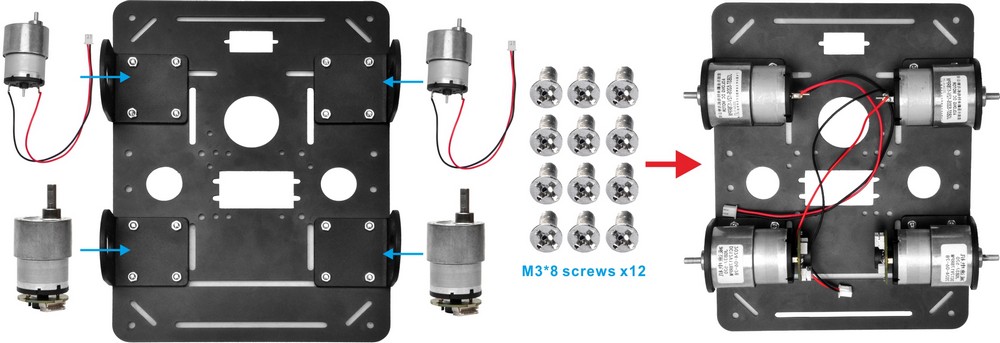
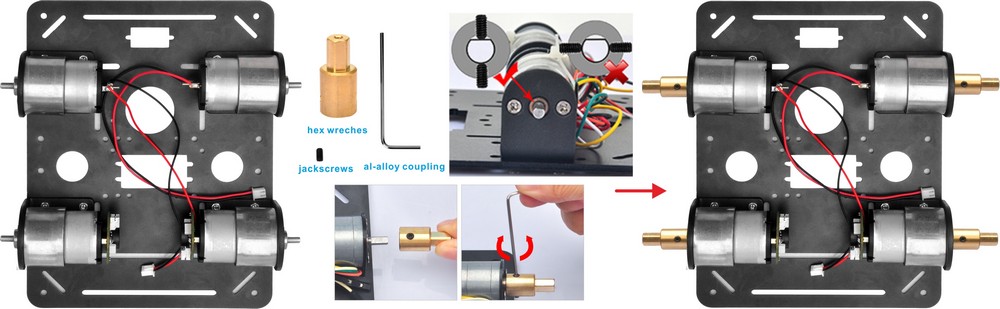
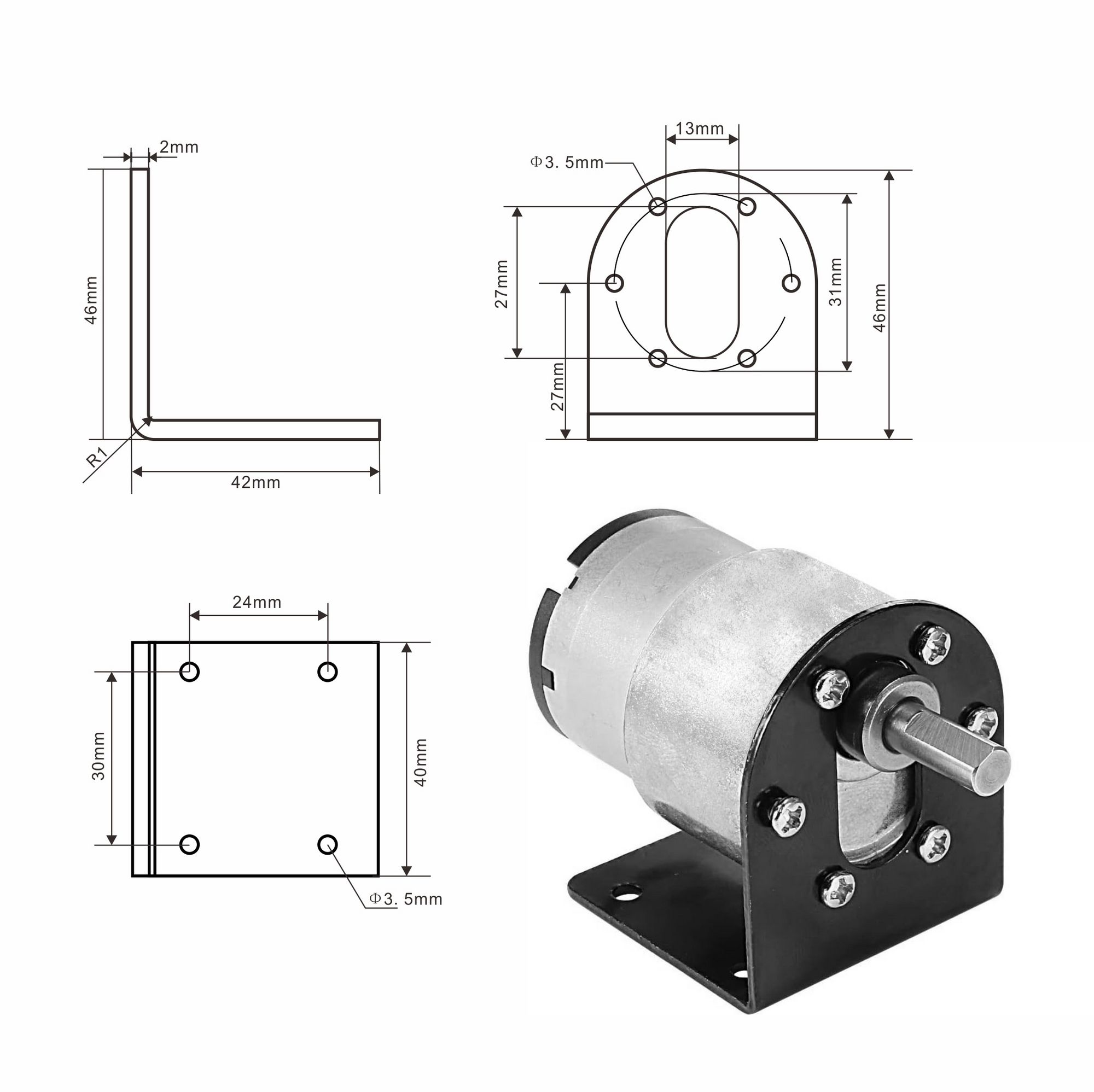
Paso 1. Instale el soporte del motor reductor en la 1.ª capa del chasis (metal) con tornillos M3×10 y tuercas M3 como se muestra en las siguientes imágenes. Paso 2. Instale 2 motores reductores 520 con cable en los soportes de la parte delantera del chasis y 2 motores 520 con encoder en los soportes de la parte trasera con tornillos M3×8.
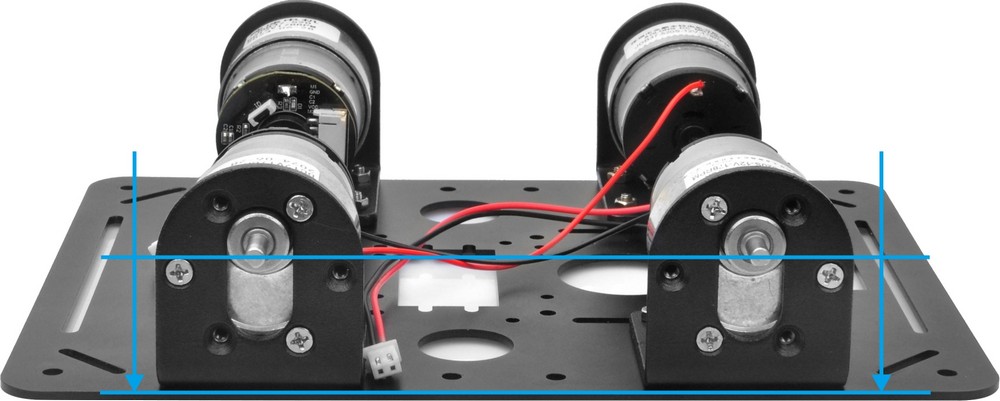
Nota: Mantenga los 4 ejes de los motores al mismo nivel
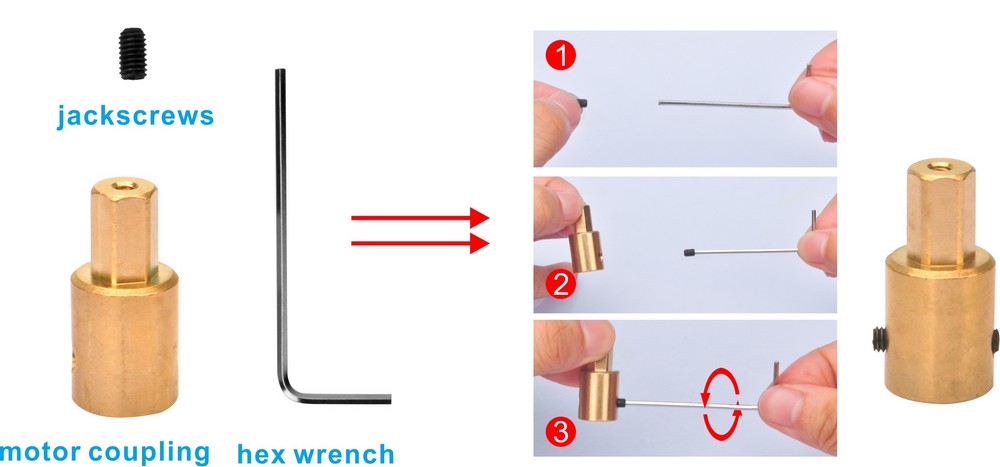
Paso 3. Instale los tornillos de bloqueo en el acoplamiento de aleación de aluminio y apriételos para fijar el acoplamiento al motor como se muestra en las imágenes siguientes. Nota: El eje del motor reductor 520 tiene un lado plano. Asegúrese de que uno de los tornillos de bloqueo esté posicionado en esa cara plana y apriete ambos tornillos sobre el eje.
Paso 4. Instale las 4 ruedas Mecanum en el acoplamiento de aleación de aluminio con 4 tornillos M2,5×20 como se muestra:
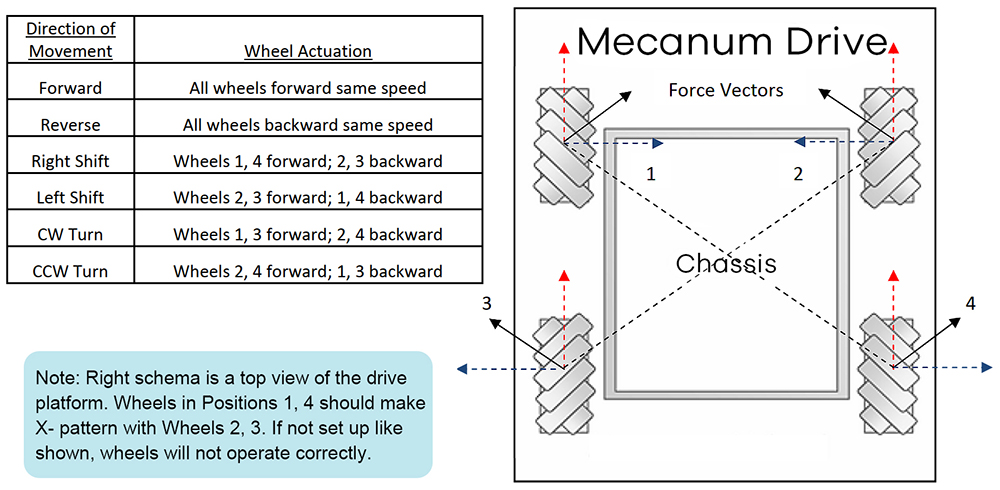
Note: There are two types of Mecanum wheels, left and right Mecanum wheel; the difference between them is the orientation of rollers. A correct configuration requires each of four wheels is set in the way as shown below, where the rotation axis of each wheel’s top roller points to the center of the platform. Please notice that all the dynamic analysis and pre-written codes are based on this configuration.
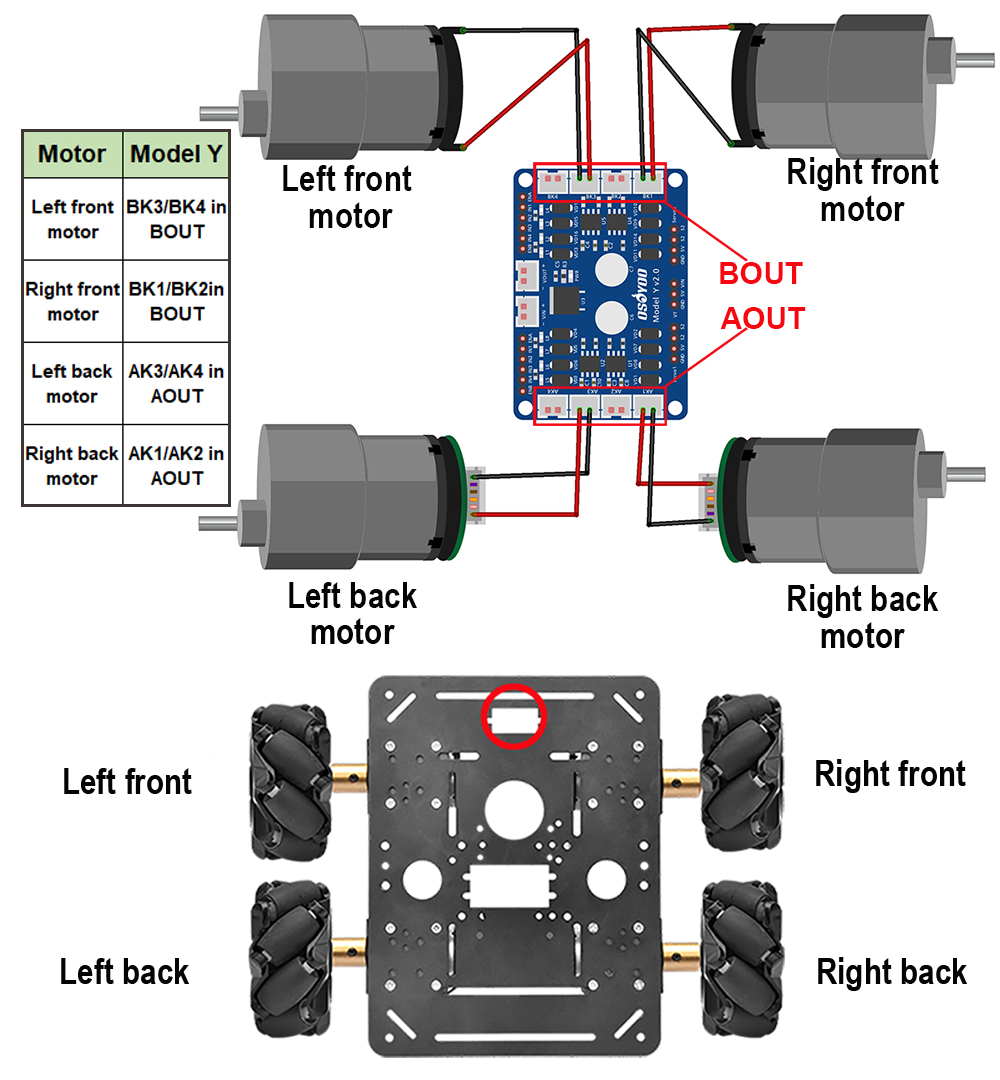
1. Conecte los 4 motores a la placa controladora Model Y como se muestra en las imágenes siguientes.
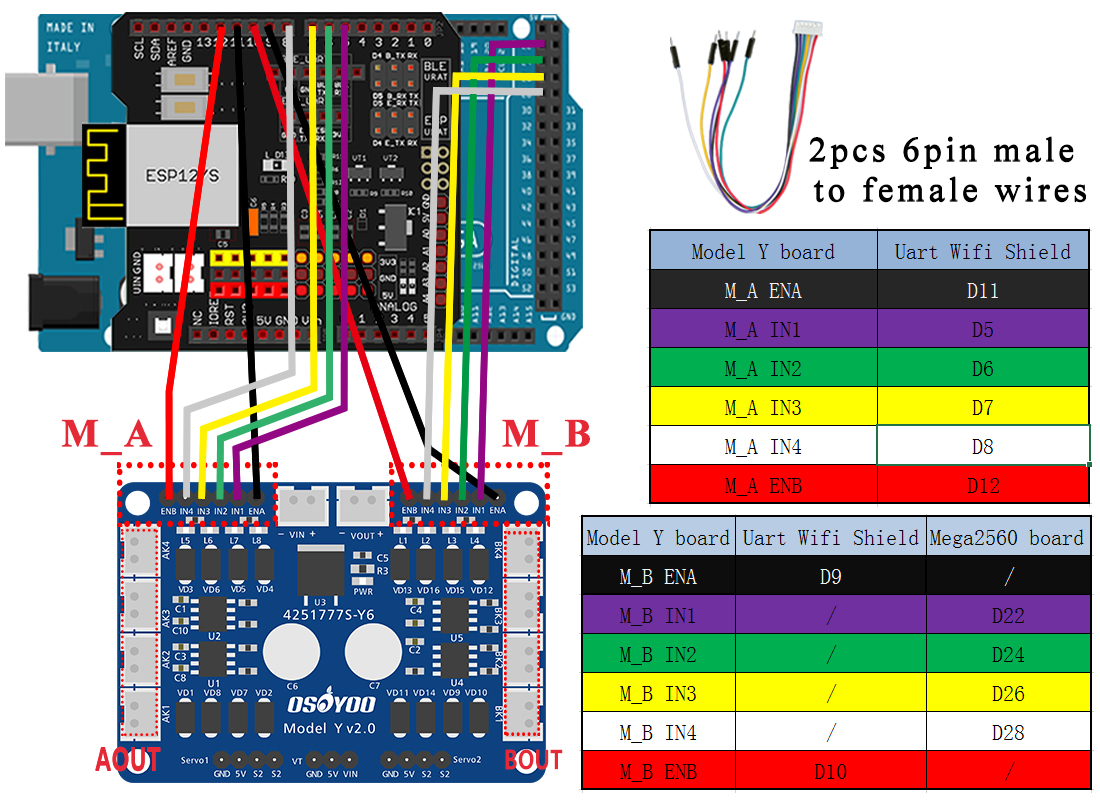
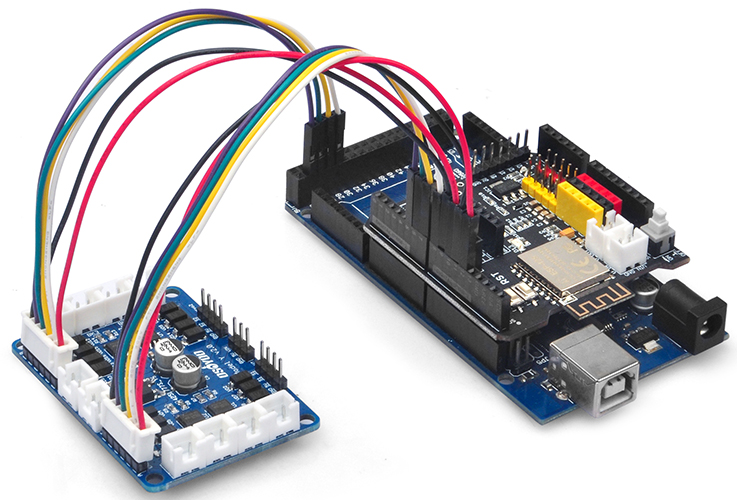
2. Conecte M_A ENA, IN1, IN2, IN3, IN4, ENB del Model Y a los pines D11, D5, D6, D7, D8, D12 del shield WiFi.
Conecte M-B ENA, ENB del Model Y a los pines D9, D10 del shield WiFi, y M_B IN1, IN2, IN3, IN4 del Model Y a los pines D22, D24, D26, D28 de la placa de control OSOYOO para Mega2560.
Precaución:
Al insertar o retirar el conector del cable paralelo de 6 pines en la toma macho de 6 pines del Model Y, sujete el soporte de plástico blanco. Nunca tire de los cables para desenchufar el conector; podría dañarlos.
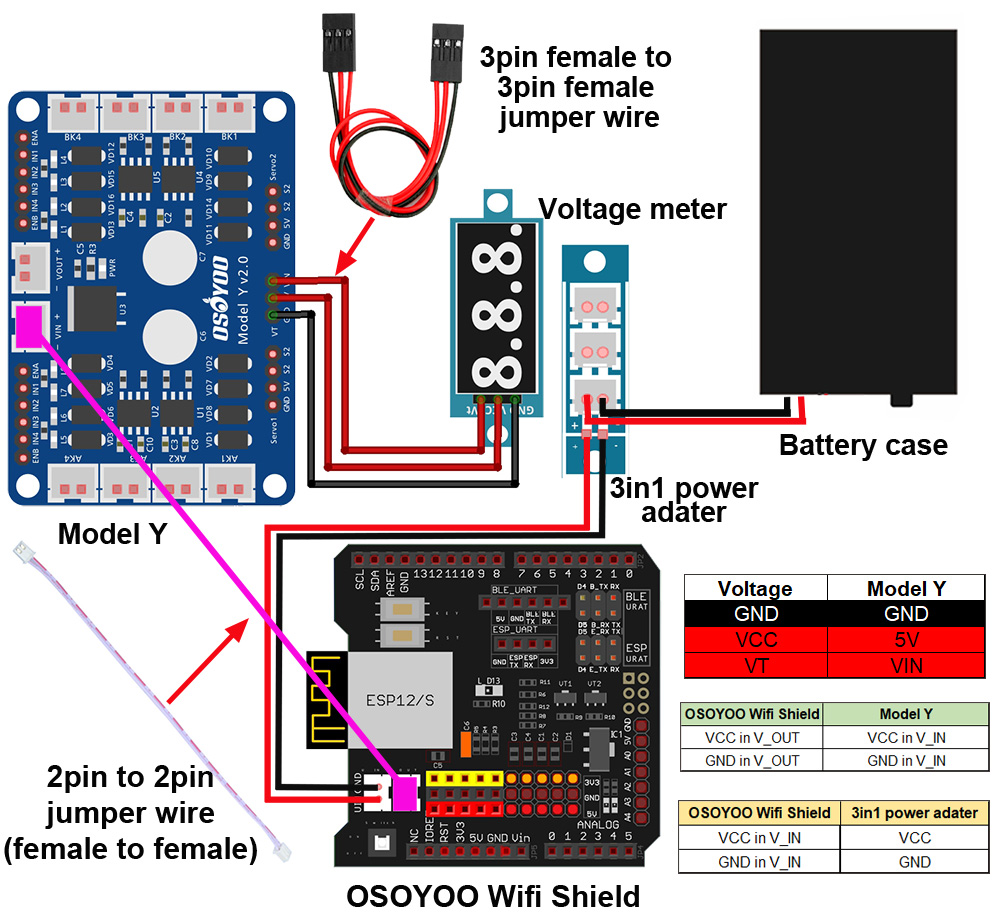
3. Connect voltage meter to model Y motor driver board with 3pin female to 3pin female jumper wire; connect V_OUT socket of OSOYOO WIFI shield to VIN socket of Model Y motor driver board with 2pin to 2pin jumper wire (female to female); insert 2pin plug(s) of battery case(s) into 3in1 power adapter; insert 2pin plug of 3in1 power adapter into V_IN socket of OSOYOO WIFI shield as following:
Nota: el adaptador 3 en 1 es para varios portabaterías con la misma tensión.
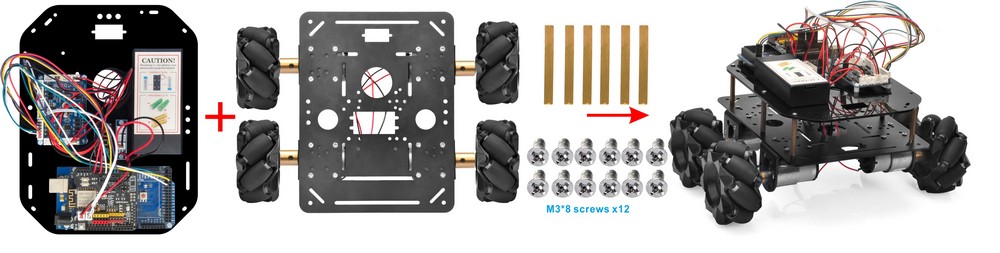
4. Instale la 2.ª capa del chasis sobre la 1.ª capa con columnas M3×40. Tenga en cuenta la parte delantera y trasera del chasis acrílico y metálico. El robot estará listo para funcionar tras este paso.
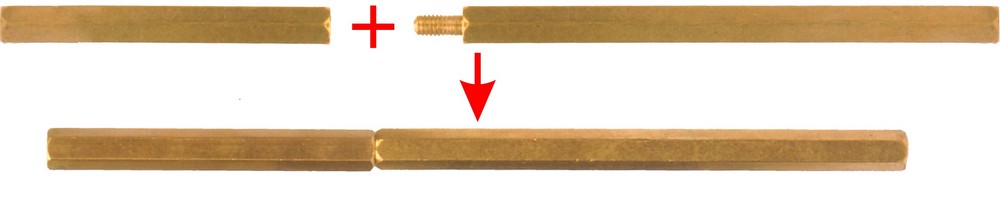
5. If you want to add more sensor, you can install 3rd layer car chassis on the robot car. Tightly screw M3*40 copper pillar with M3*65+6 copper pillar to be long pillar firstly, then Install 3rd layer car chassis on 1st layer car chassis with these long pillars
Proyecto de ejemplo
Paso 1: Instale la última versión de Arduino IDE (si ya tiene la versión 1.1.16 o posterior, omita este paso). Descargue Arduino IDE desde https://www.arduino.cc/en/Main/Software?setlang=en e instale el software.
Step 3: Connect Mega2560 board to PC with USB cable, Open Arduino IDE → click file → click Open → choose code “lesson1.ino” in lesson1 folder, load the code into Arduino.
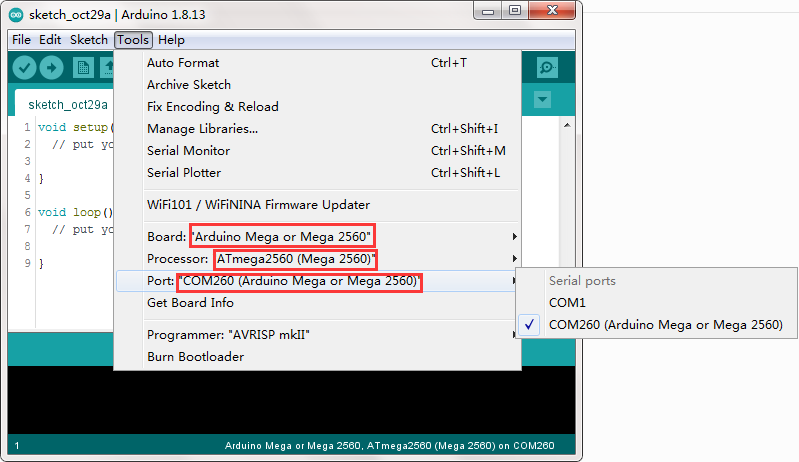
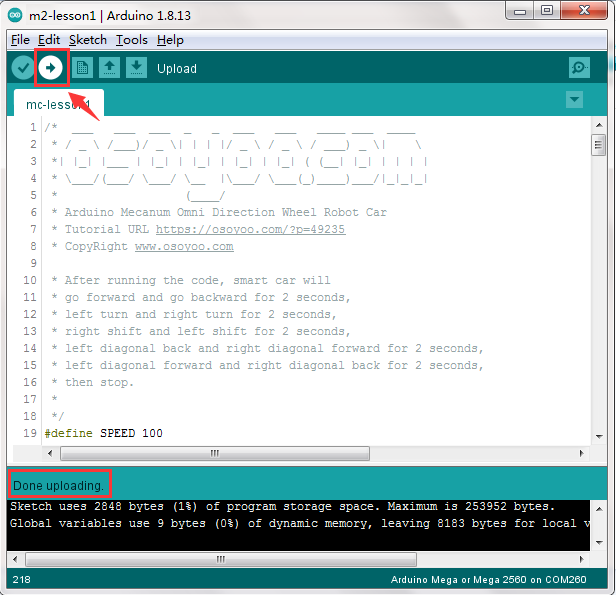
Paso 4: Seleccione la placa y el puerto correspondientes a su proyecto y cargue el sketch en la placa.
Desconecte el Arduino del PC, coloque las baterías en el portabaterías. Ponga el robot en el suelo y encienda el interruptor del shield Wi-Fi OSOYOO Uart y el del portabaterías.
El robot se moverá: Adelante→Atrás→Giro izquierda→Giro derecha→Desplazamiento lateral derecho→Desplazamiento lateral izquierdo→Diagonal arriba derecha→Diagonal abajo izquierda→Diagonal arriba izquierda→Diagonal abajo derecha











































{kind=link}
{kind=link}