Il kit robot OSOYOO FlexiRover per Arduino Mega2560 è una piattaforma robotica versatile progettata per utenti avanzati. Include una scheda compatibile con Mega2560 e un modulo di espansione WiFi per il controllo remoto e il monitoraggio. Il kit è dotato di quattro potenti motori 520; i motori posteriori sono provvisti di encoder per un controllo preciso, ideale per movimenti accurati nelle applicazioni robotiche.
Caratteristiche principali:
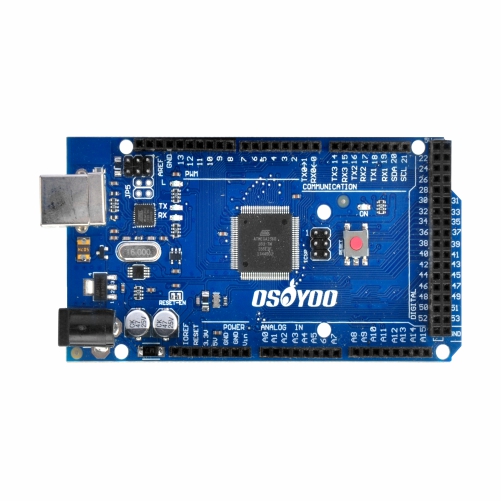
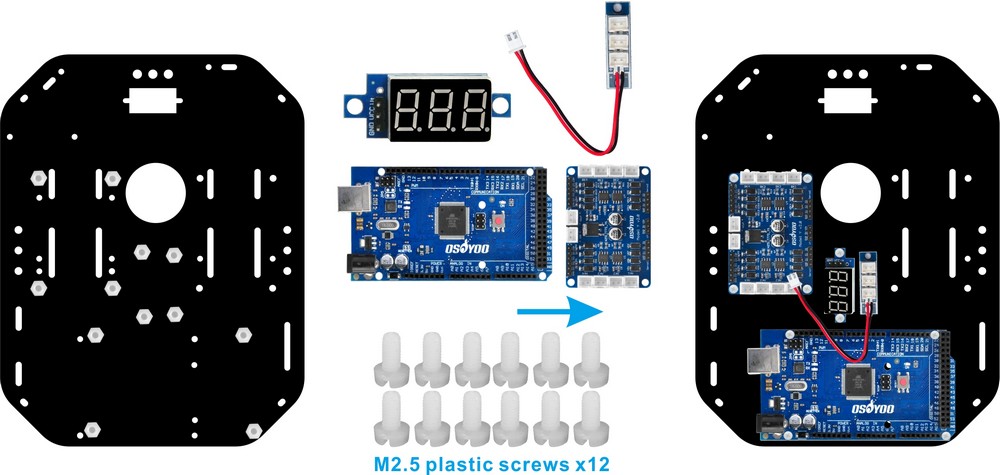
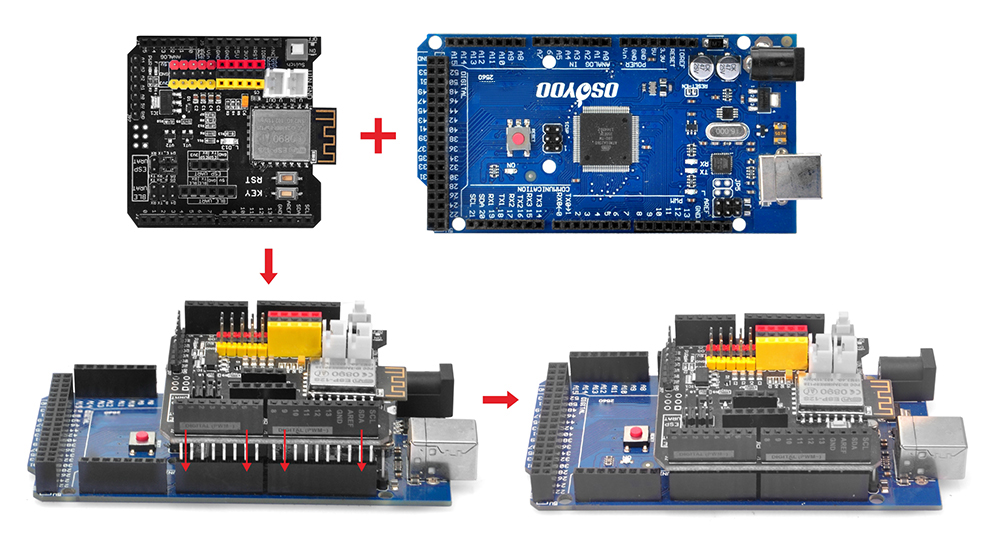
Scheda Mega2560 con WiFi: La scheda Arduino compatibile con Mega2560, abbinata a un modulo WiFi, garantisce connettività wireless per il controllo remoto, le applicazioni IoT e la trasmissione dati, ampliando le possibilità dei progetti robotici.
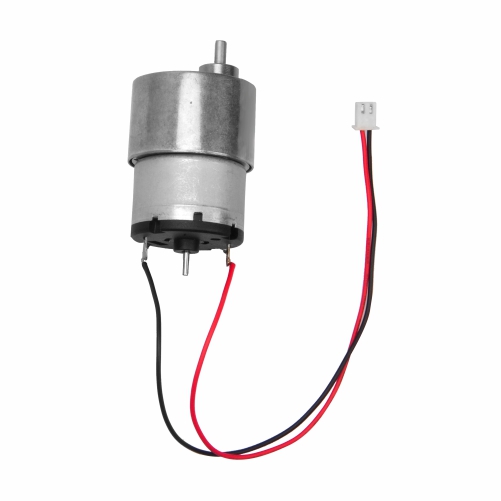
Motori 520 con encoder: I motori 520 garantiscono movimenti fluidi, mentre gli encoder posteriori offrono un controllo preciso di velocità e direzione, perfetto per la navigazione e il rilevamento degli ostacoli.
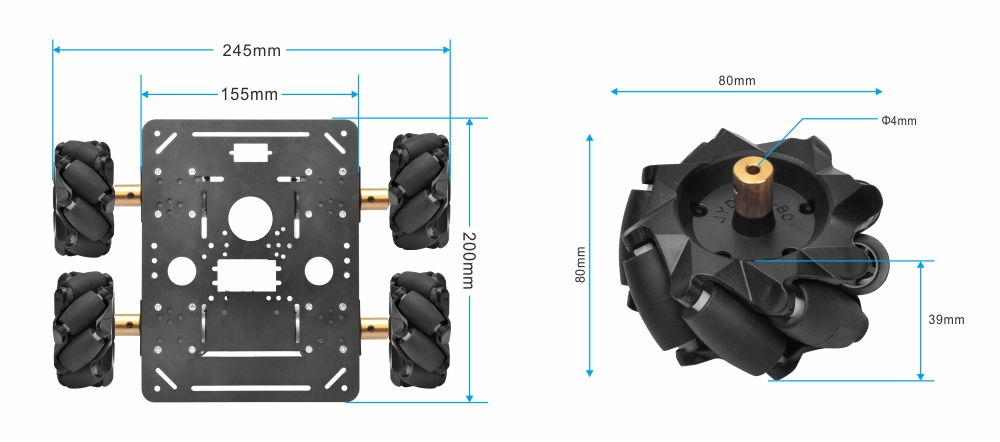
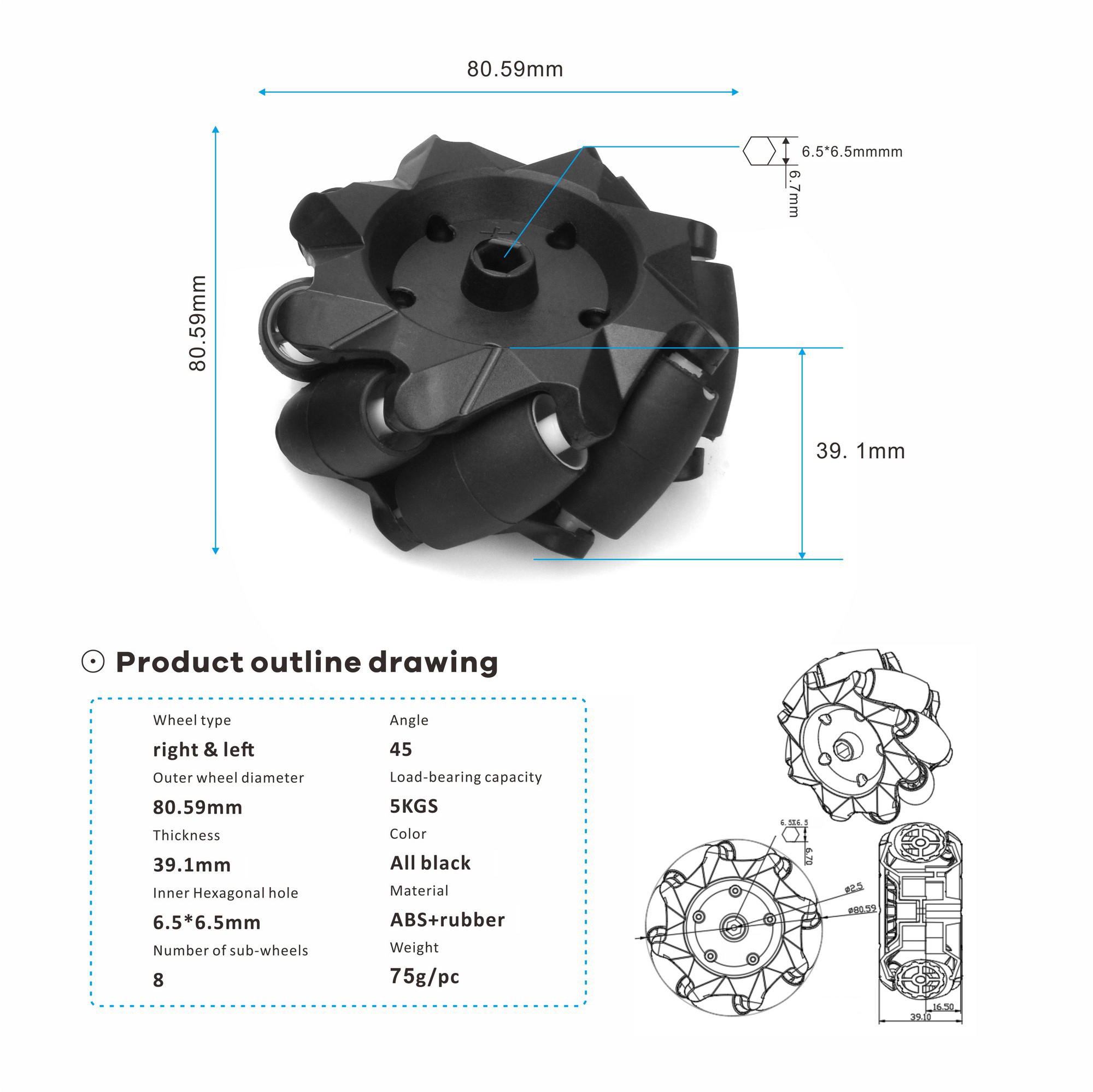
Ruote Mecanum per il movimento omnidirezionale: Le ruote Mecanum incluse consentono al robot di muoversi in qualsiasi direzione, rendendolo versatile in ambienti complessi e in applicazioni che richiedono una navigazione agile.
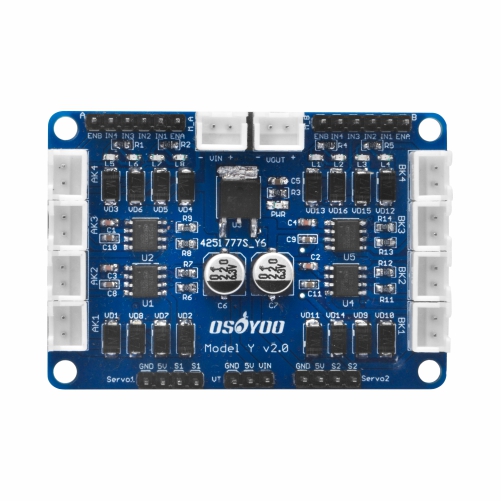
Scheda driver motore per trazione a 4 ruote: La scheda driver OSOYOO Model Y controlla fino a quattro motori in modo indipendente, consentendo schemi di controllo avanzati e meccanismi di guida flessibili.
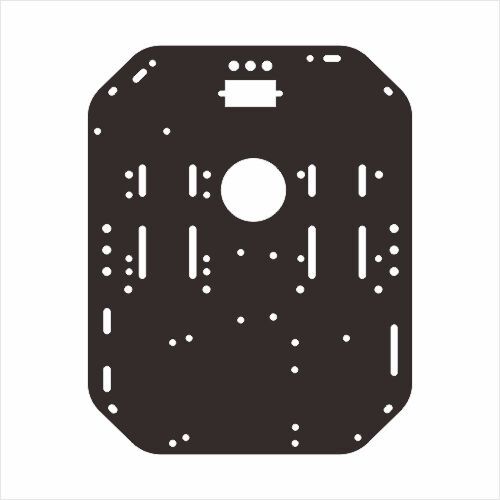
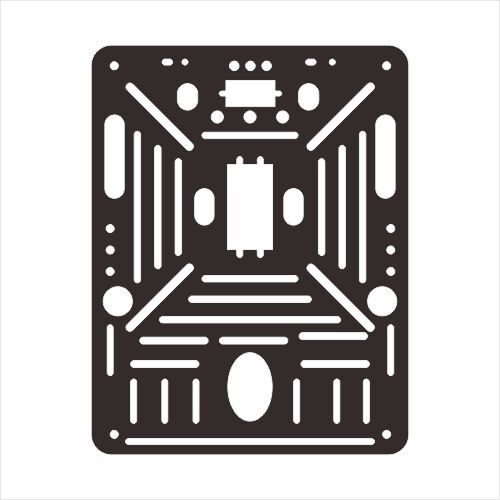
Telaio personalizzabile: Il telaio dispone di fori pre-perforati per il montaggio di componenti aggiuntivi come sensori, bracci o telecamere, consentendo agli utenti di personalizzare il robot per compiti specifici.
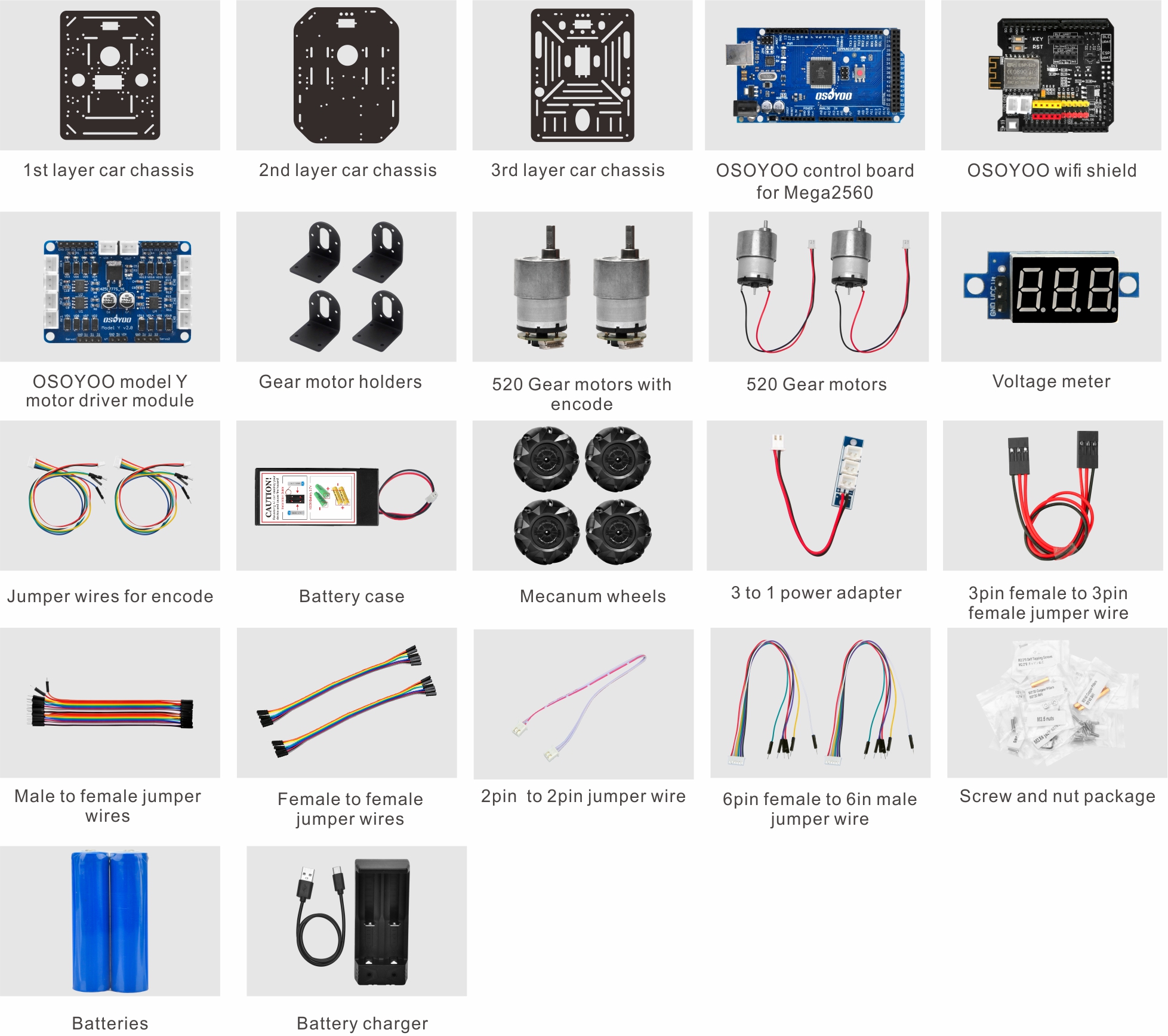
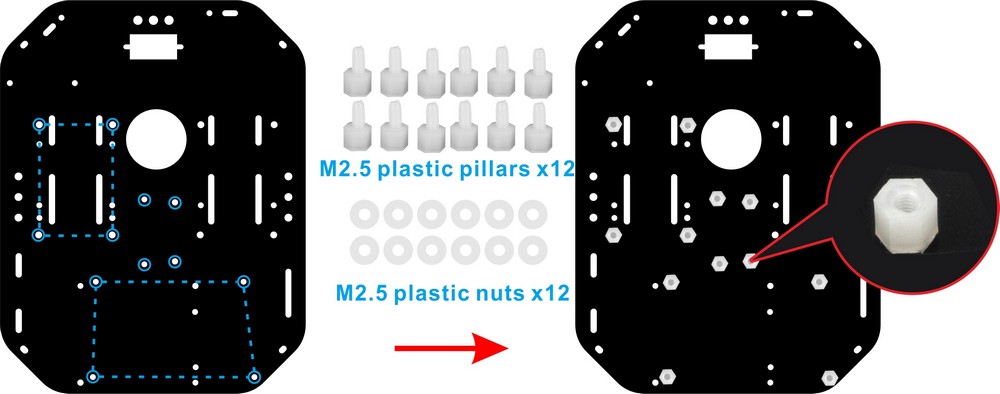
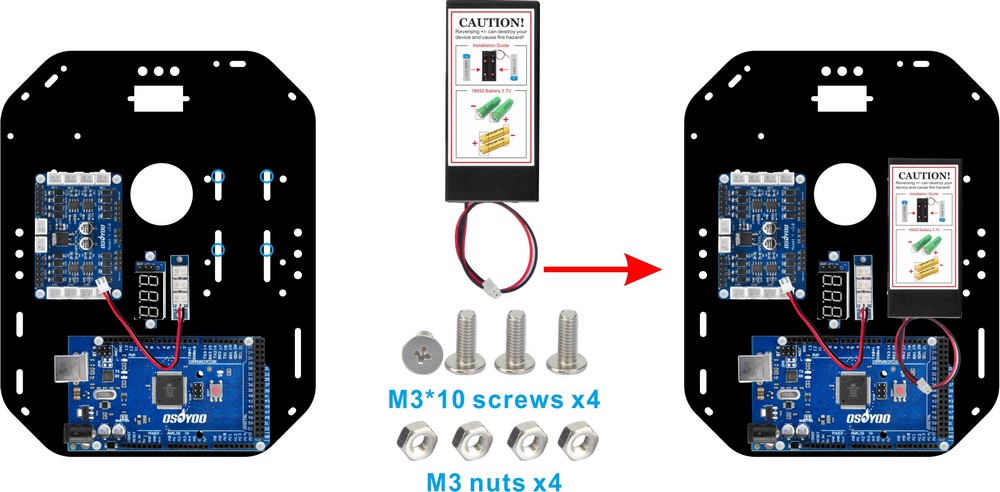
Contenuto: 1 cacciavite a taglio, 1 chiave esagonale, 60 viti M3×8, 12 set viti in plastica M2,5 con colonnine e dadi, 4 colonnine in rame M3×65+6, 10 colonnine in rame M3×40, 30 viti M3×10 con dadi, 4 viti M2,5×20, 4 giunti motore
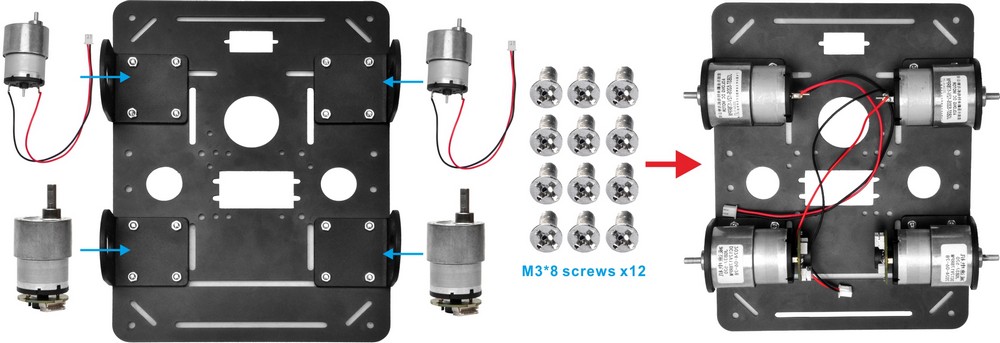
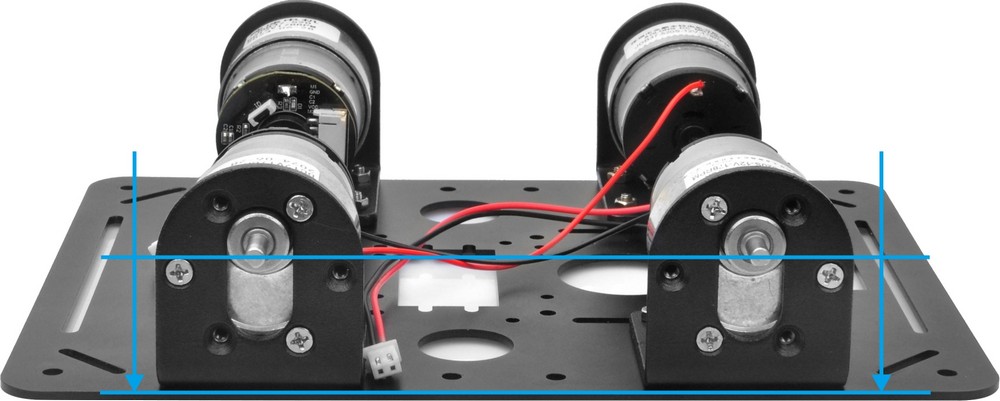
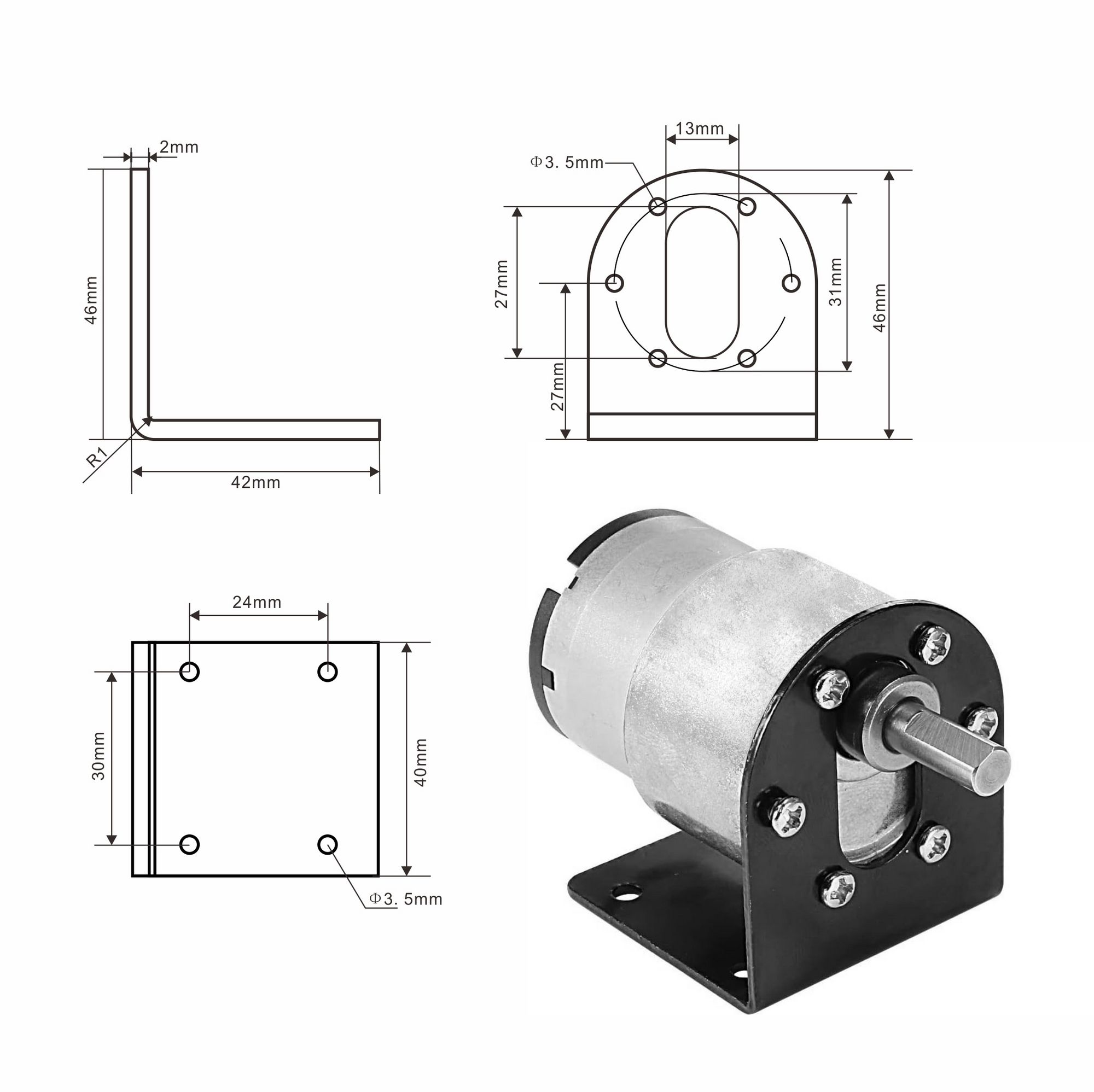
Passo 1. Installare il supporto del motoriduttore sul 1° strato del telaio (metallo) con viti M3×10 e dadi M3 come mostrato nelle immagini seguenti. Passo 2. Installare 2 motoriduttori 520 con cavo sui supporti anteriori del telaio e 2 motori 520 con encoder sui supporti posteriori con viti M3×8.
Nota: Mantenere i 4 assi dei motori allo stesso livello
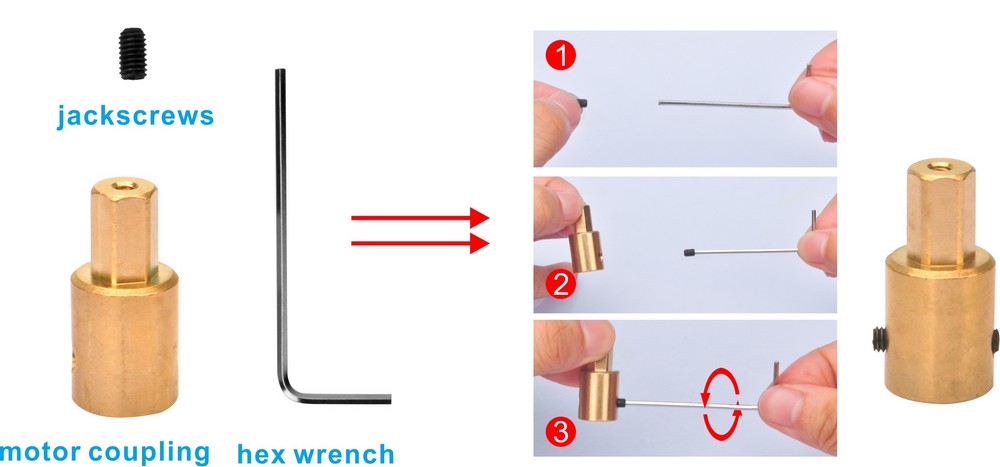
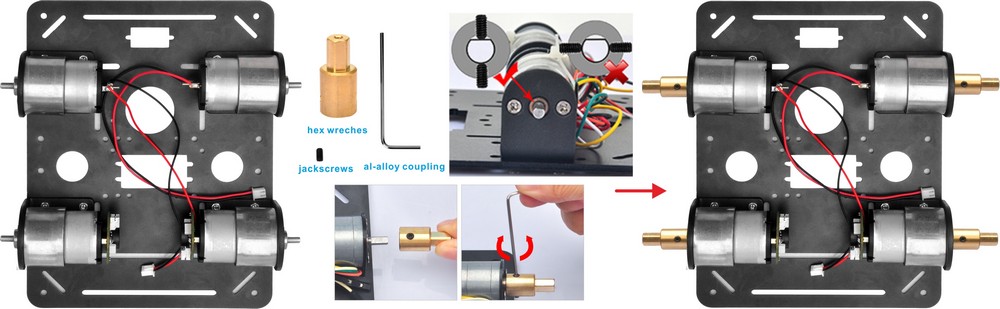
Passo 3. Installare le viti di bloccaggio sul giunto in lega di alluminio e stringerle per fissare il giunto sul motore come mostrato nelle immagini seguenti. Nota: L’asse del motoriduttore 520 ha un lato piatto. Assicurarsi che una delle viti di bloccaggio sia posizionata su questo lato piatto, quindi stringere entrambe le viti sull’asse.
Passo 4. Installare le 4 ruote Mecanum sui giunti in lega di alluminio con 4 viti M2,5×20 come mostrato:
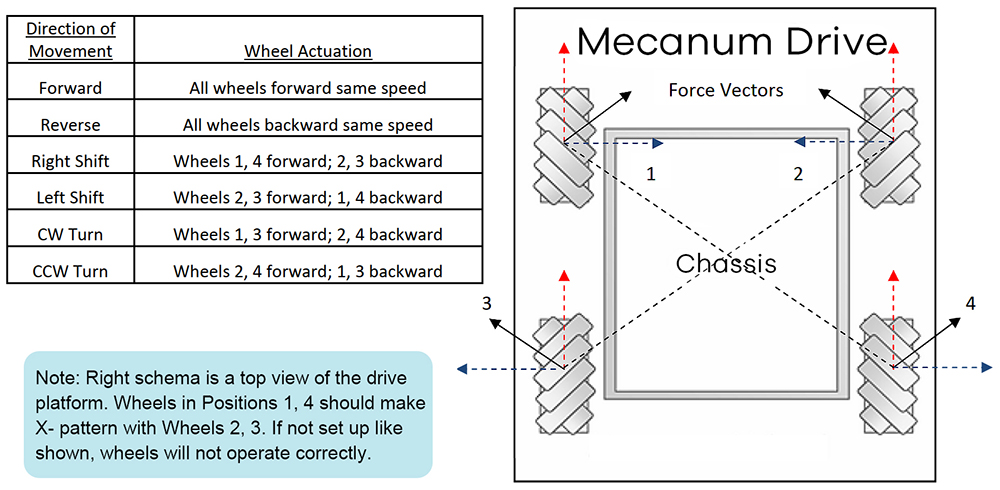
Note: There are two types of Mecanum wheels, left and right Mecanum wheel; the difference between them is the orientation of rollers. A correct configuration requires each of four wheels is set in the way as shown below, where the rotation axis of each wheel’s top roller points to the center of the platform. Please notice that all the dynamic analysis and pre-written codes are based on this configuration.
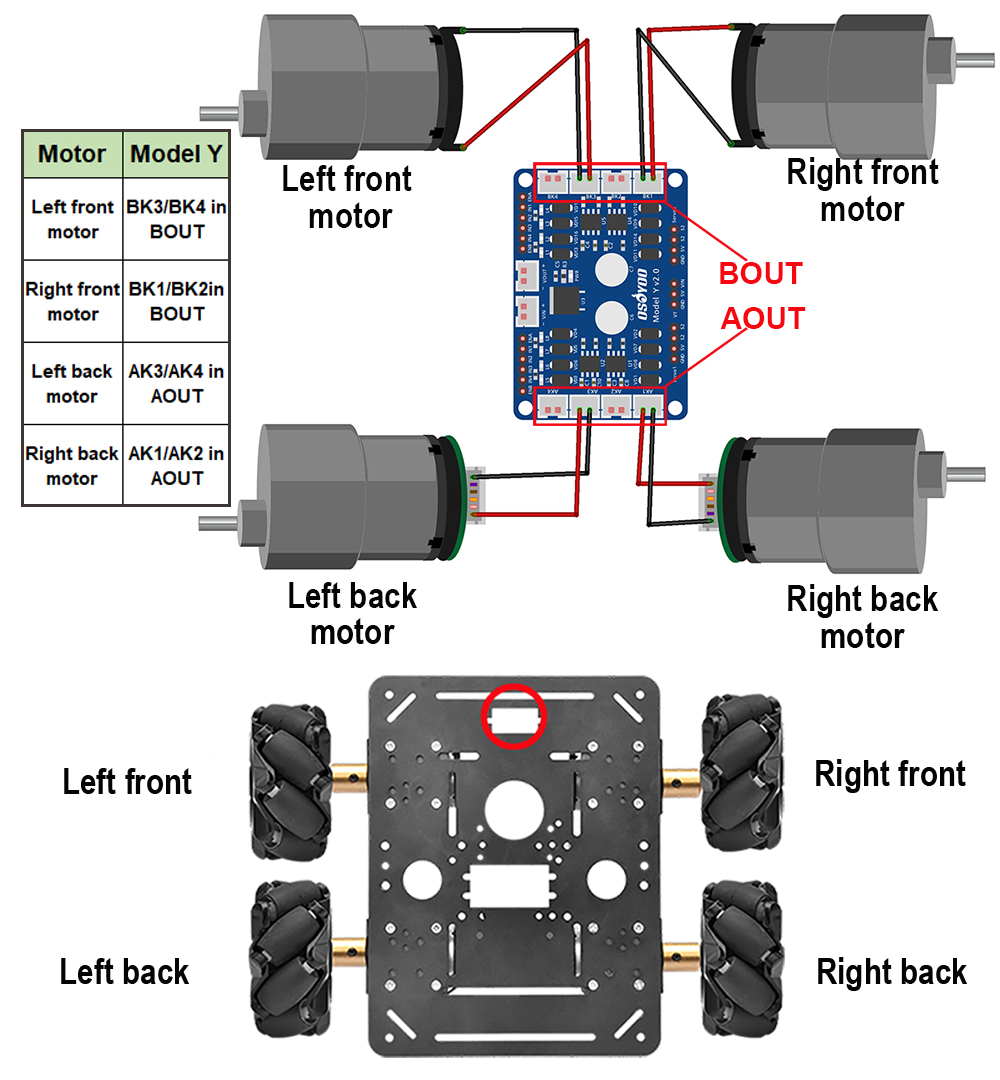
1. Collegare i 4 motori alla scheda driver Model Y come mostrato nelle immagini seguenti.
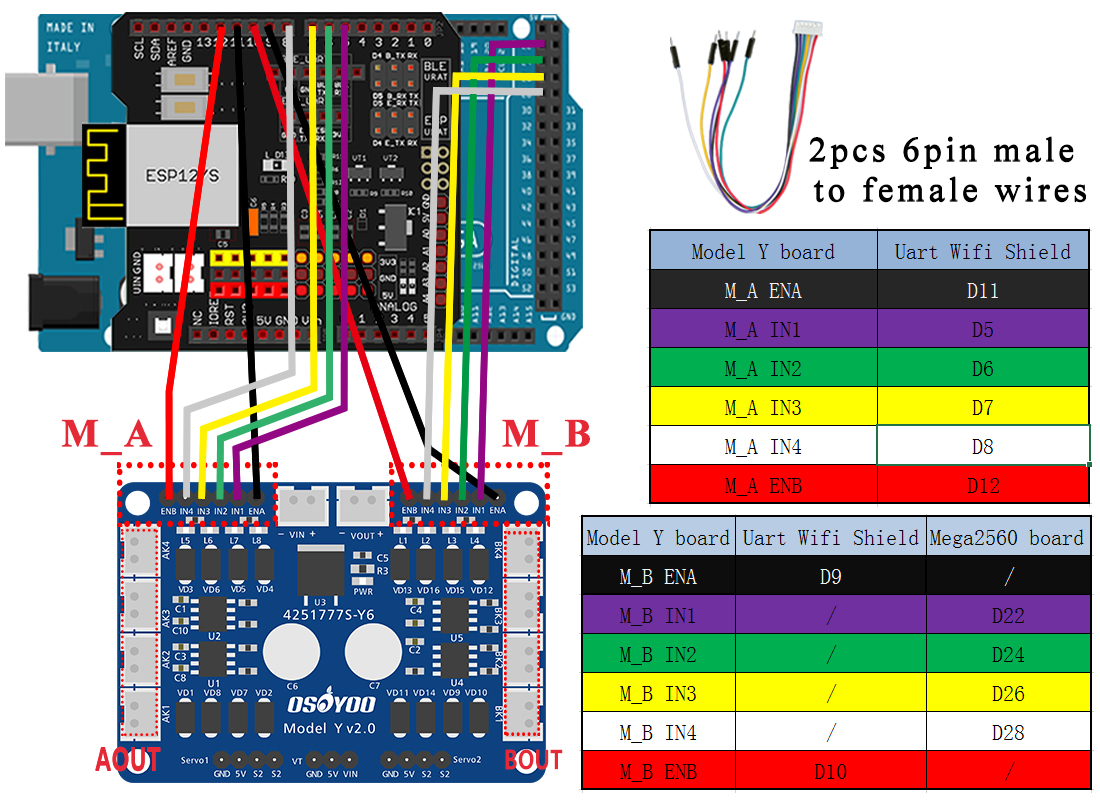
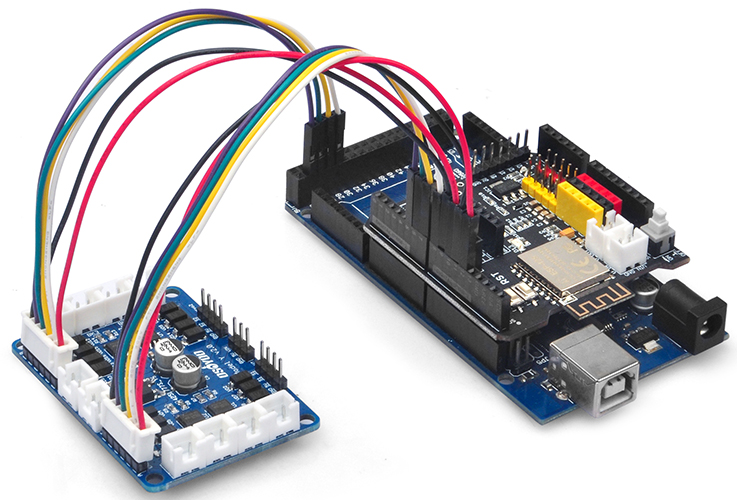
2. Collegare M_A ENA, IN1, IN2, IN3, IN4, ENB del Model Y ai pin D11, D5, D6, D7, D8, D12 dello shield WiFi.
Collegare M-B ENA, ENB del Model Y ai pin D9, D10 dello shield WiFi, e M_B IN1, IN2, IN3, IN4 del Model Y ai pin D22, D24, D26, D28 della scheda di controllo OSOYOO per Mega2560.
Attenzione:
Quando si inserisce o si rimuove il connettore del cavo parallelo a 6 pin nella presa maschio a 6 pin del Model Y, tenere il porta-pin in plastica bianca. Non tirare mai i cavi per sfilare il connettore, altrimenti i cavi potrebbero danneggiarsi.
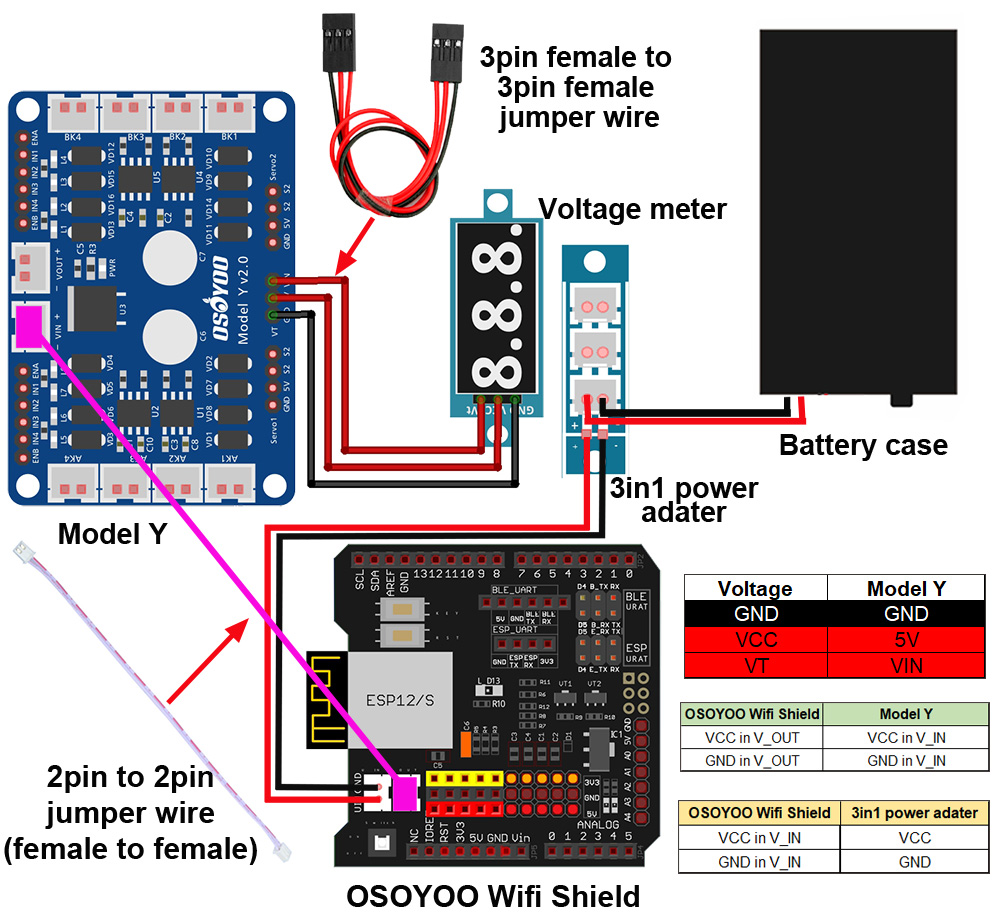
3. Connect voltage meter to model Y motor driver board with 3pin female to 3pin female jumper wire; connect V_OUT socket of OSOYOO WIFI shield to VIN socket of Model Y motor driver board with 2pin to 2pin jumper wire (female to female); insert 2pin plug(s) of battery case(s) into 3in1 power adapter; insert 2pin plug of 3in1 power adapter into V_IN socket of OSOYOO WIFI shield as following:
Nota: l’adattatore 3-in-1 è adatto per più portabatterie con la stessa tensione.
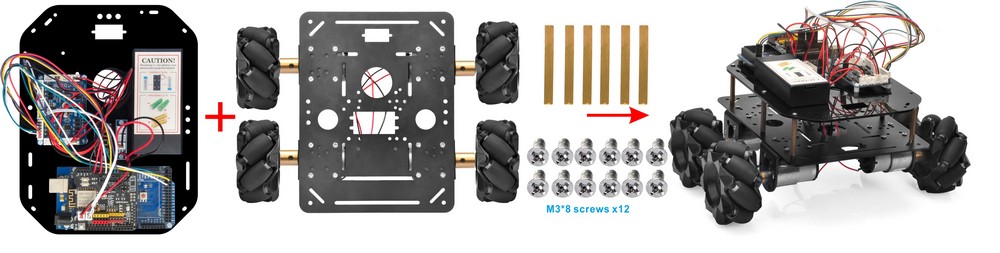
4. Installare il 2° strato del telaio sul 1° strato con colonnine M3×40. Prestare attenzione alla direzione anteriore e posteriore del telaio in acrilico e in metallo. Il robot è pronto a funzionare dopo questo passaggio.
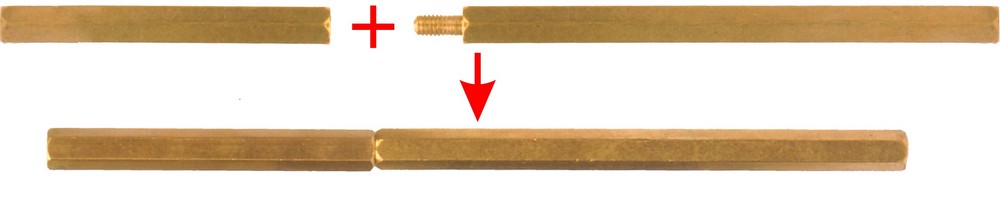
5. If you want to add more sensor, you can install 3rd layer car chassis on the robot car. Tightly screw M3*40 copper pillar with M3*65+6 copper pillar to be long pillar firstly, then Install 3rd layer car chassis on 1st layer car chassis with these long pillars
Progetto di esempio
Passo 1: Installare l’ultima versione di Arduino IDE (se si dispone già di una versione 1.1.16 o successiva, saltare questo passaggio). Scaricare Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en e installare il software.
Step 3: Connect Mega2560 board to PC with USB cable, Open Arduino IDE → click file → click Open → choose code “lesson1.ino” in lesson1 folder, load the code into Arduino.
Passo 4: Selezionare la scheda e la porta corrispondenti al proprio progetto, quindi caricare lo sketch sulla scheda.
Scollegare l’Arduino dal PC, inserire le batterie nel portabatterie. Posare il robot a terra e accendere l’interruttore sullo shield Wi-Fi OSOYOO Uart e quello sul portabatterie.
Il robot eseguirà i seguenti movimenti: Avanti→Indietro→Svolta sinistra→Svolta destra→Traslazione destra→Traslazione sinistra→Diagonale alto destra→Diagonale basso sinistra→Diagonale alto sinistra→Diagonale basso destra











































{kind=link}
{kind=link}