En esta lección, te guiaremos a través de la instalación y configuración del sistema operativo Raspberry Pi, junto con el software y las bibliotecas necesarias para controlar tu Coche Robot con Ruedas Mecanum OSOYOO.
Nota: aquí tomamos Raspberry Pi Imager v1.8.5 como ejemplo para instalar el sistema operativo; otras versiones pueden tener algunas diferencias. (Dispositivo: Raspberry Pi 4B)
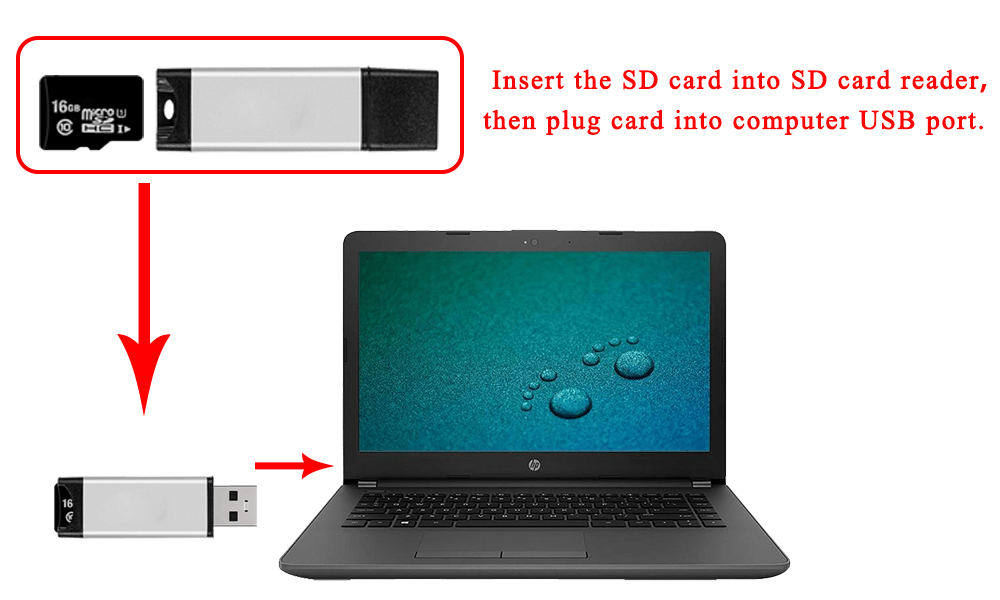
Paso 1: Prepara una tarjeta microSD (tarjeta TF) recién formateada con un lector USB de tarjetas microSD; los tamaños recomendados son 16GB, 32GB.(Omite este paso si tu tarjeta SD tiene una imagen del sistema operativo Rasbian preinstalada).
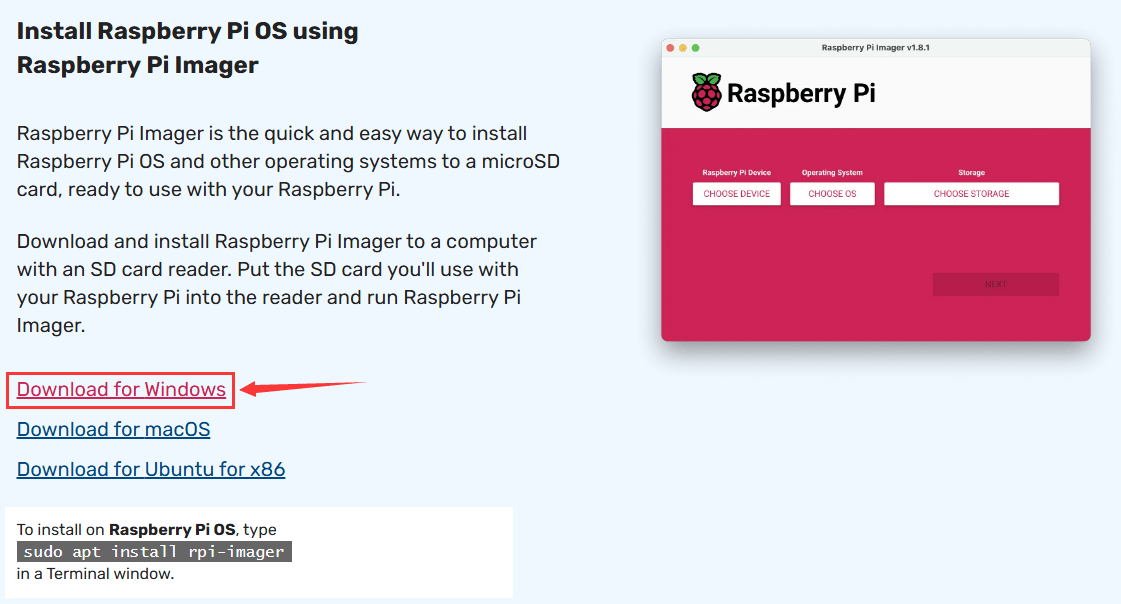
Paso 2: Descarga Raspberry Pi Imager desde el sitio web oficial de Raspberry Pi:
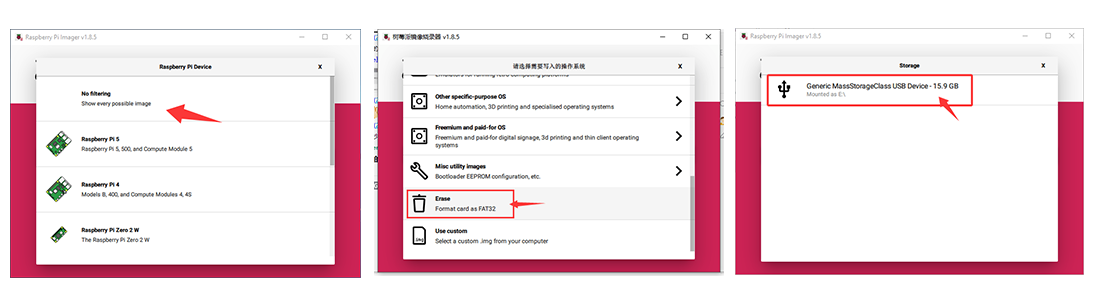
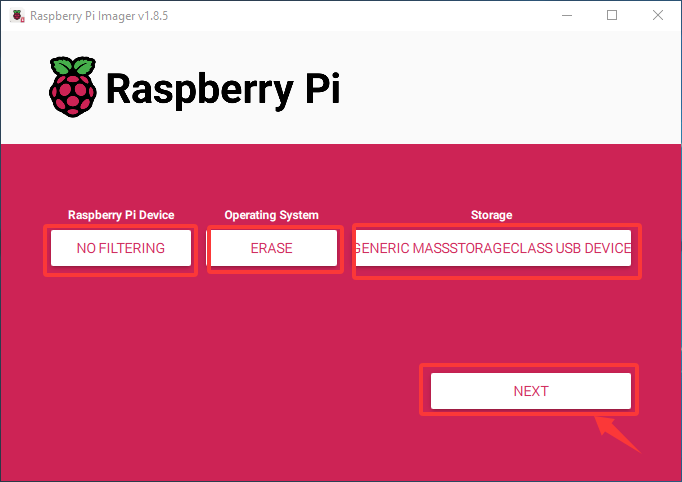
Paso 3: Formatea tu tarjeta microSD: Ejecuta Raspberry Pi Imager y selecciona “Borrar” en el campo Sistema Operativo y “tu tarjeta microSD” en el campo Almacenamiento.
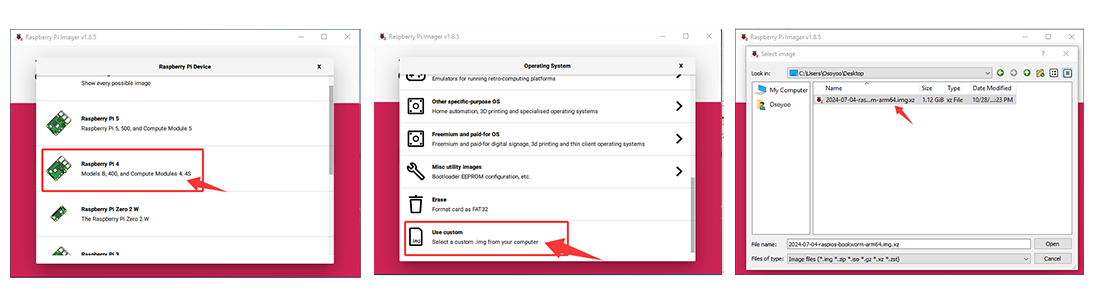
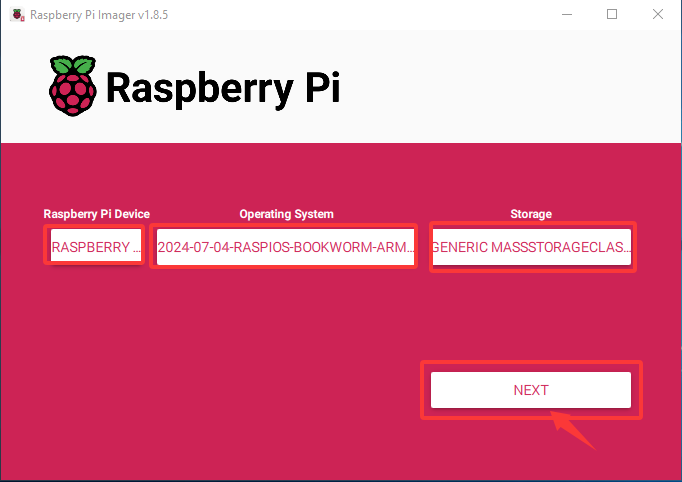
Paso 4: Ejecuta Raspberry Pi Imager, selecciona tu Raspberry Pi 4 en el campo Dispositivo, luego selecciona “Usar personalizado” en el campo Sistema Operativo, navega hasta el “Raspberry Pi OS” que descargaste, y luego selecciona “tu tarjeta SD” en el campo Almacenamiento. (Si ya has grabado Raspberry Pi OS en tu tarjeta SD, omite los pasos 2 a 5).
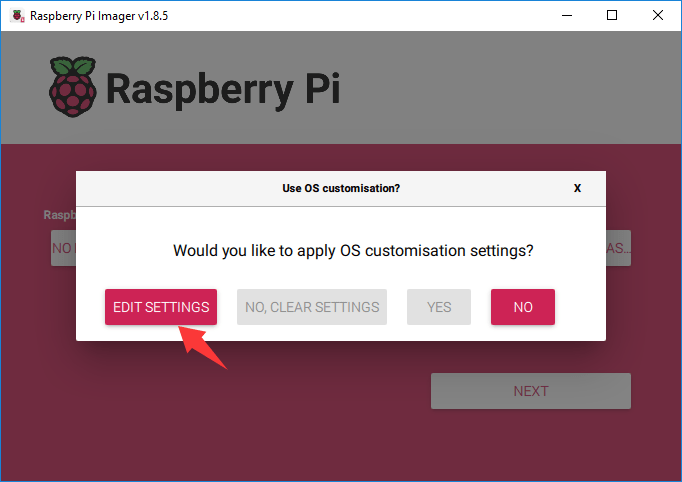
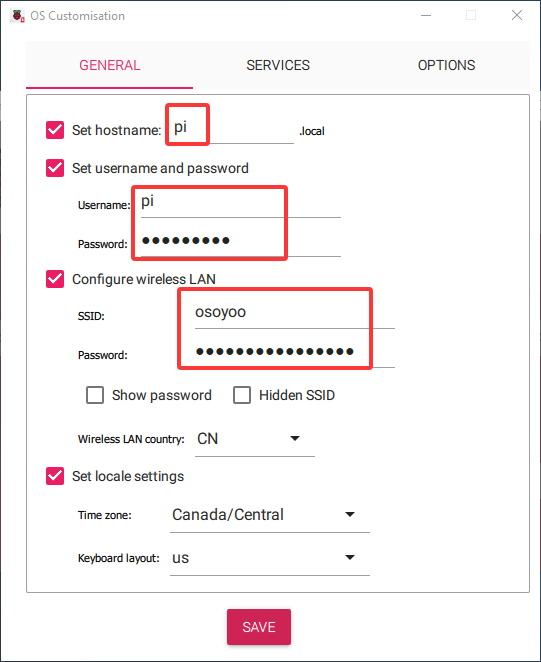
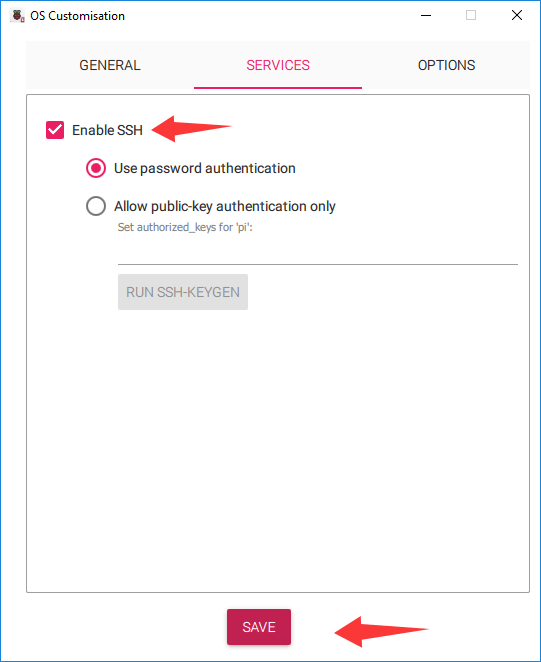
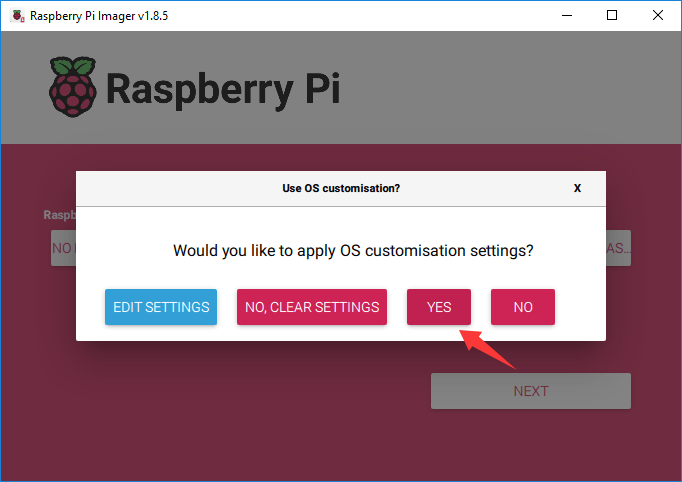
Paso 5: Haz clic en “EDITAR CONFIGURACIÓN” para configurar el nombre de usuario y la contraseña (usamos “pi” como nombre de usuario y “raspberry” como contraseña en este ejemplo), configura la red LAN inalámbrica, luego haz clic en SERVICIOS para habilitar SSH, finalmente haz clic en “GUARDAR”.
Control Remoto del Raspberry Pi
Paso 1: Encontrar la dirección IP
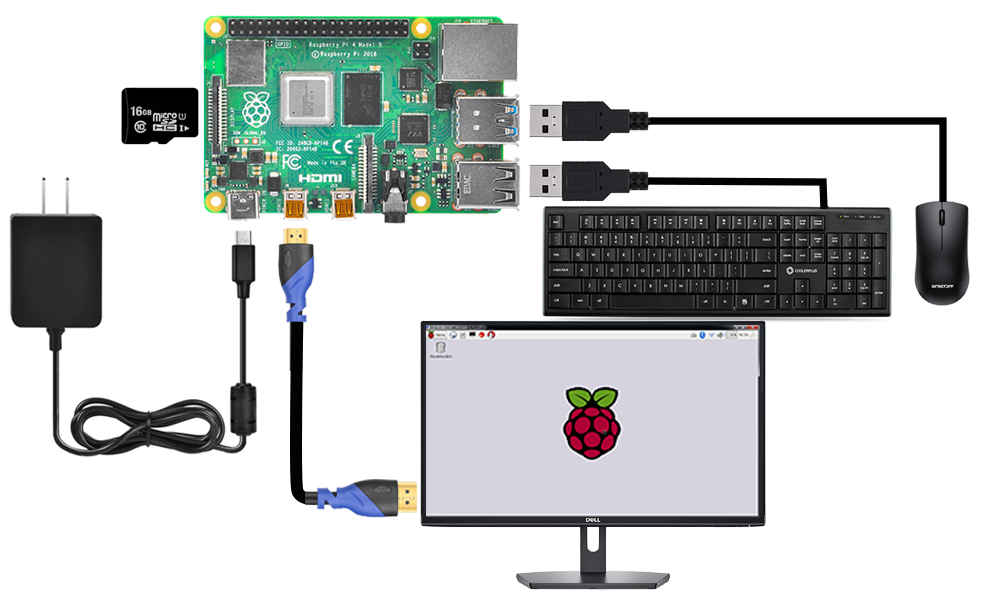
1. Conecta el Raspberry Pi a tu monitor o televisor HDMI. Conecta un teclado y un ratón a los puertos USB del Raspberry Pi. Inserta la tarjeta SD con el sistema operativo instalado en la ranura de tu Raspberry Pi (Si ya has instalado tu coche robot Raspberry Pi, conéctalo a una pantalla para encontrar la dirección IP.).
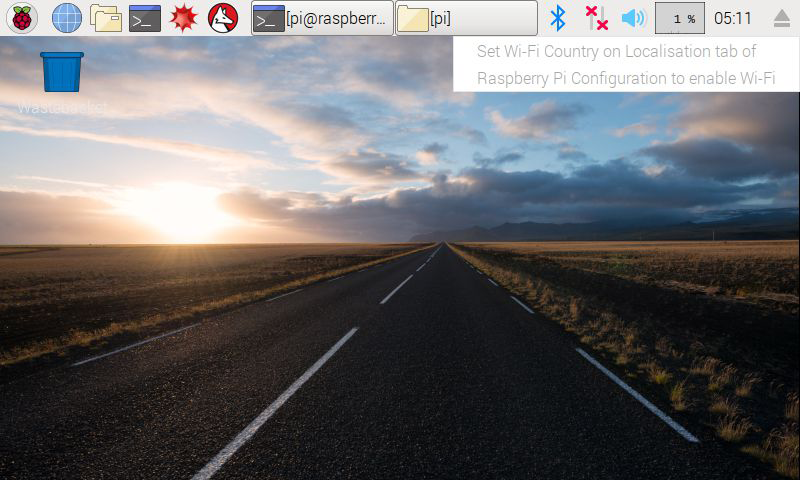
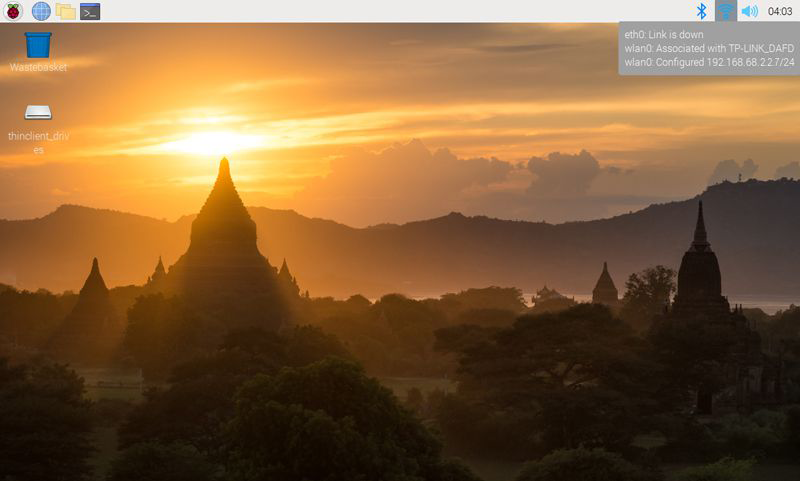
2. Si pasas el ratón sobre el icono de LAN, podrías ver una notificación como la siguiente:
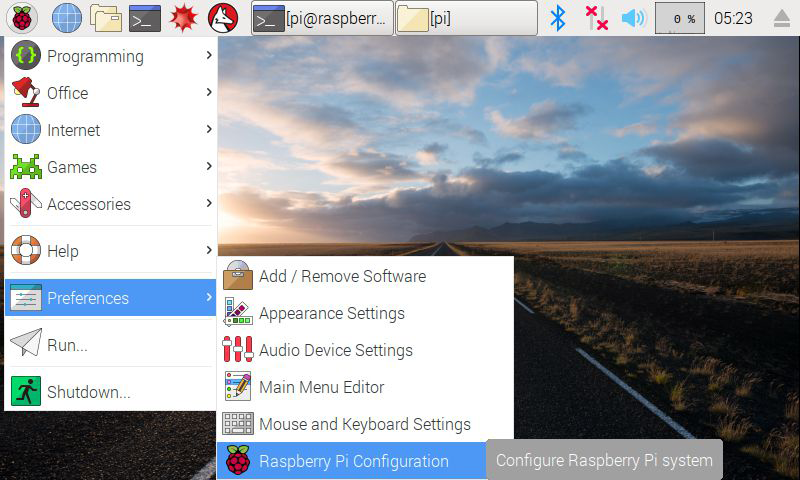
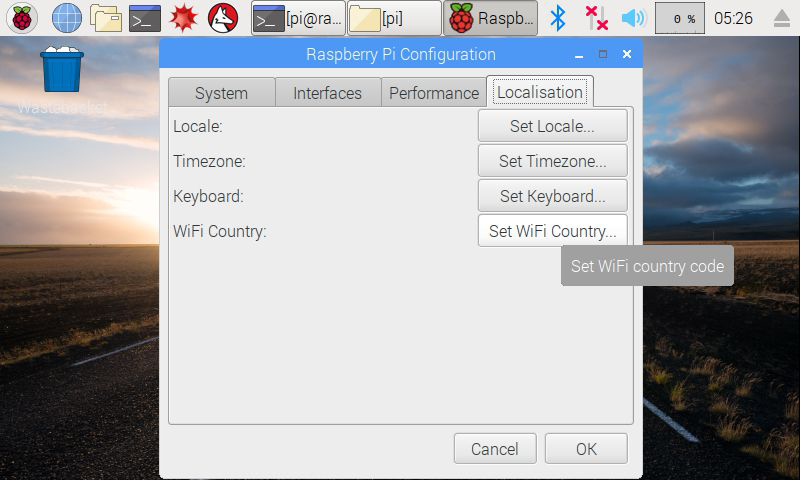
3. Haz clic para configurar los ajustes de Wi-Fi de la siguiente manera:
4. Encuentra la dirección IP del Raspberry Pi. Método A: Conecta tu Raspberry Pi a un monitor y ratón, haz clic en el icono de LAN o Wi-Fi para obtener la dirección IP como en la siguiente foto.
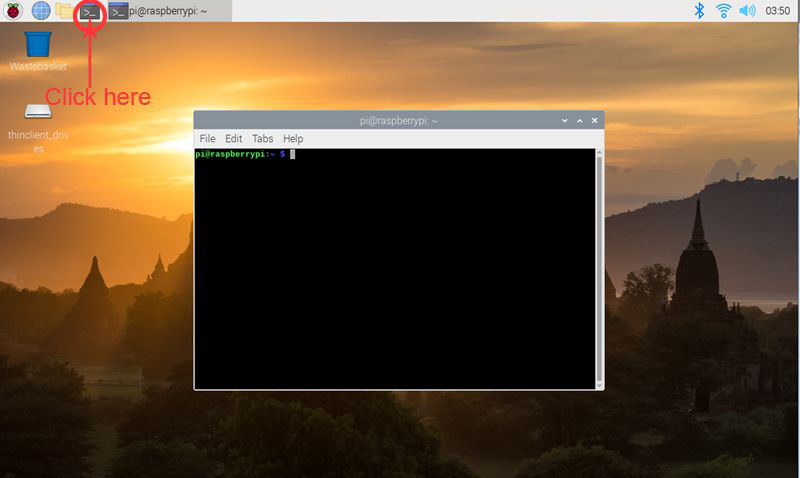
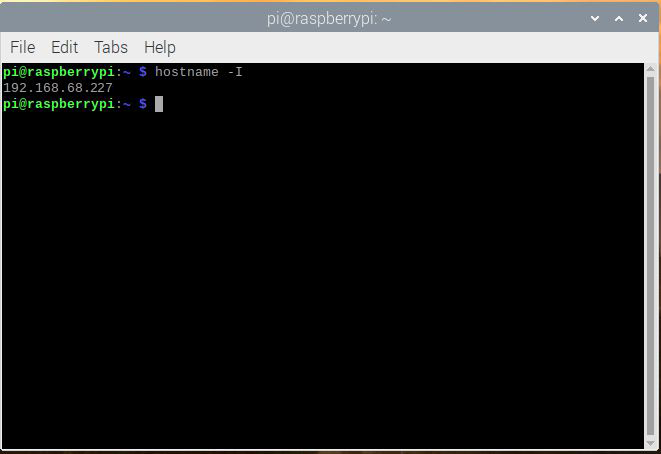
Método B: Abre la Terminal en la pantalla, ingresa el siguiente comando en la ventana de terminal para obtener tu dirección IP:
hostname -I
Paso 2: Usa un cliente SSH para controlar el Raspberry Pi de forma remota.
1. Inserta la tarjeta SD con el sistema operativo instalado en la placa Raspberry Pi (antes de insertar la tarjeta SD, apaga primero el Raspberry Pi), luego enciende el coche robot.
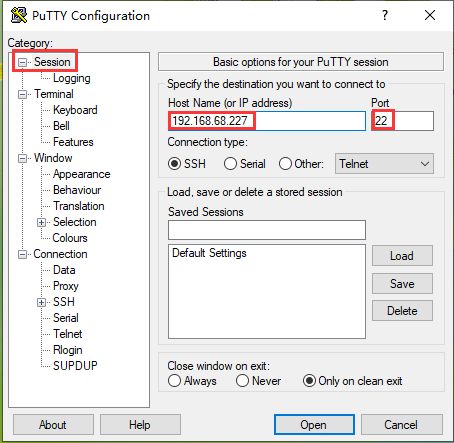
3. Abre PuTTY y haz clic en Sesión en la estructura de árbol de la izquierda (generalmente colapsada al iniciar PuTTY), ingresa la dirección IP obtenida en el cuadro de texto debajo de Nombre de host pi (o dirección IP 192.168.68.227) y 22 debajo de Puerto (por defecto es 22), luego haz clic en Abrir.
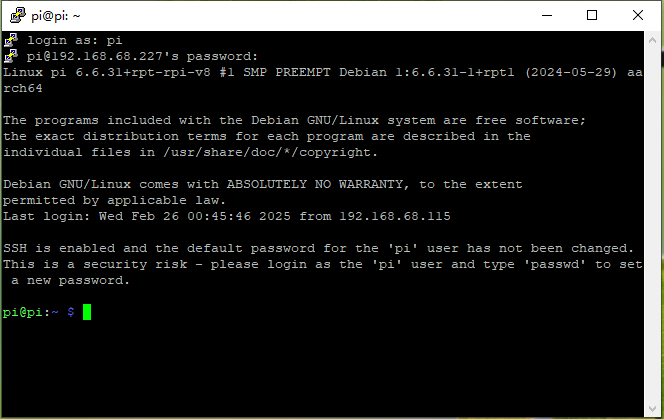
4. Nota: cuando inicias sesión por primera vez en el Raspberry Pi con la dirección IP, se te mostrará un recordatorio de seguridad. Simplemente haz clic en Sí. Cuando la ventana de PuTTY pida “login as:”, escribe el nombre de usuario: pi y la contraseña: raspberry (la predeterminada, si no la has cambiado).
Nota: cuando escribas la contraseña, la ventana no mostrará nada, pero en realidad estás escribiendo. Así que concéntrate en escribirla correctamente y presiona Enter. Después de iniciar sesión exitosamente en el Raspberry Pi, la ventana se mostrará de la siguiente manera:
***********************Proyecto de Ejemplo***********************
Paso 1: Habilitar I2C
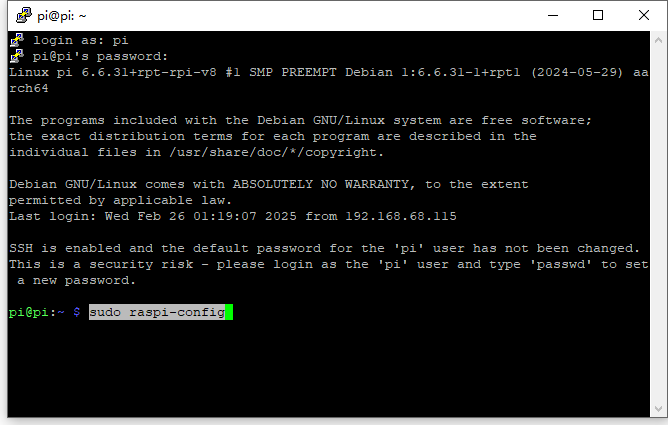
Si no has habilitado I2C, ejecuta el siguiente comando para habilitarlo.
sudo raspi-config
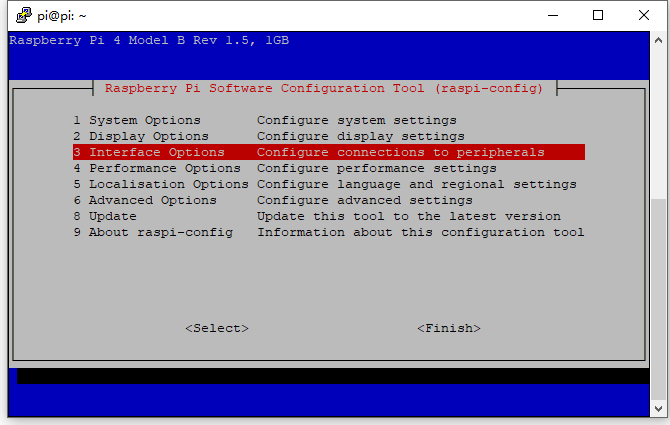
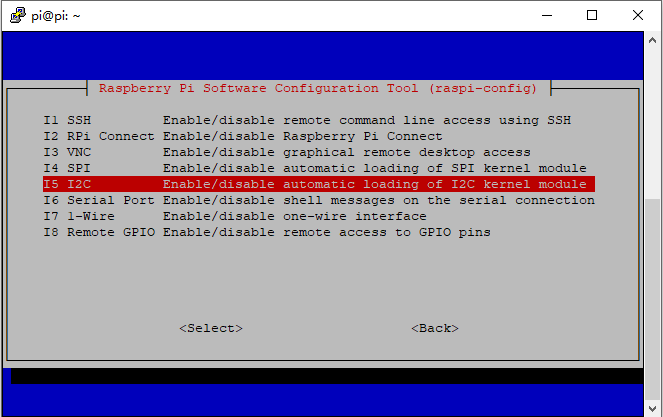
Luego selecciona Opciones de Interfaz -> I2C -> Sí -> Ok -> Finalizar.
Paso 2: Si no tienes las bibliotecas rpi.gpio y adafruit-pca9685, usa los siguientes comandos para instalarlas.
Paso 5: Coloca el coche robot en el suelo y ejecuta el siguiente comando:
python mecanum5.py
Después de ejecutar el script de Python anterior, tus motores avanzarán durante 0,75 segundos, luego retrocederán durante 0,75 segundos, girarán a la izquierda durante 0,75 segundos, a la derecha durante 0,75 segundos, se desplazarán a la derecha, luego a la izquierda, realizarán algunos movimientos omnidireccionales y se detendrán.
Al final de esta lección, tu Raspberry Pi estará completamente configurado y podrás controlar de forma remota el coche robot y ejecutar comandos de movimiento ( python mecanum.py).
The car will move in the following sequence: forward → backward → right parallel shift → left parallel shift → diagonal left-forward→back to original point→diagonal right-forward→back to original point →left turn → right turn → , and finally stop.
Troubleshooting
El coche se moverá en la siguiente secuencia: adelante → atrás → desplazamiento paralelo a la derecha → desplazamiento paralelo a la izquierda → diagonal adelante-izquierda → regreso al punto original → diagonal adelante-derecha → regreso al punto original → giro a la izquierda → giro a la derecha → y finalmente se detendrá.
Resolución de Problemas
Si, después de ejecutar el código de la Lección 1, notas que las ruedas de un lado no giran, o que las ruedas de un lado solo pueden avanzar pero no retroceder, o solo retroceder pero no avanzar, el problema probablemente sea un cable suelto o roto en el cable de 6 pines que conecta la placa Model Y.
Aquí está la solución:
Paso 1: Desconecta el cable de 6 pines que conecta la placa Model Y y la placa Arduino.
Paso 2: Busca seis (6) cables de conexión individuales hembra-macho de repuesto en tu kit (cualquier color está bien).
Paso 3: Usa estos seis cables de conexión individuales para reconectar manualmente los pines de la placa Model Y (ENA, IN1, IN2, IN3, IN4, ENB) a los pines correspondientes en el Arduino, según el mapeo de cables anterior de la Model Y.
Paso 4: Vuelve a probar el código de la Lección 1 para ver si el problema se resuelve. Si el problema persiste, puedes enviar los detalles de tu problema a [email protected] y nuestro equipo de soporte técnico te ayudará.