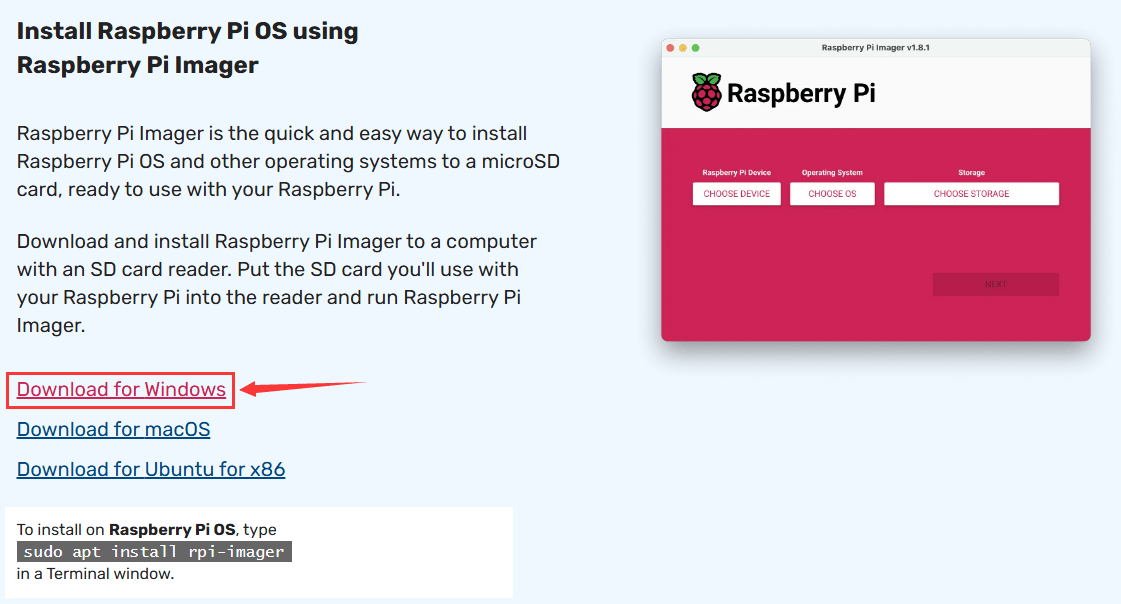
In dieser Lektion führen wir Sie durch die Installation und Einrichtung des Raspberry Pi-Betriebssystems sowie der notwendigen Software und Bibliotheken zur Steuerung Ihres OSOYOO Mecanum-Rad Roboterautos.
Hinweis: Hier verwenden wir Raspberry Pi Imager v1.8.5 als Beispiel zur Installation des Betriebssystems; andere Versionen können einige Unterschiede aufweisen. (Gerät: Raspberry Pi 4B)
Schritt 1: Bereiten Sie eine neu formatierte microSD-Speicherkarte (TF-Karte) mit einem USB-microSD-Kartenleser vor; empfohlene Größen sind 16GB, 32GB.. (Überspringen Sie diesen Schritt, wenn Ihre SD-Karte ein vorinstalliertes Rasbian-OS-Image enthält).
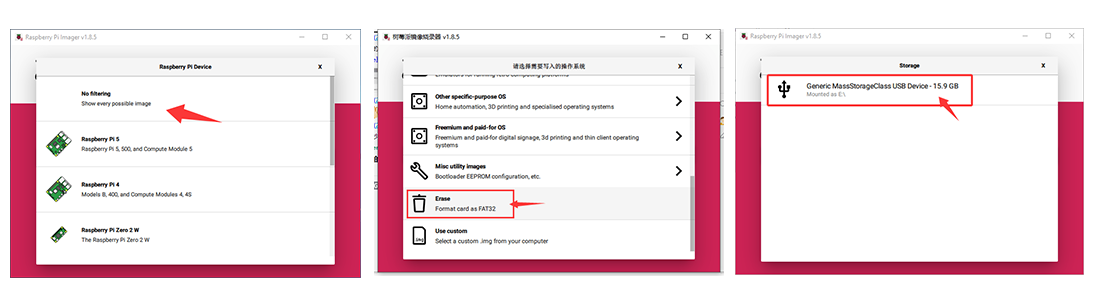
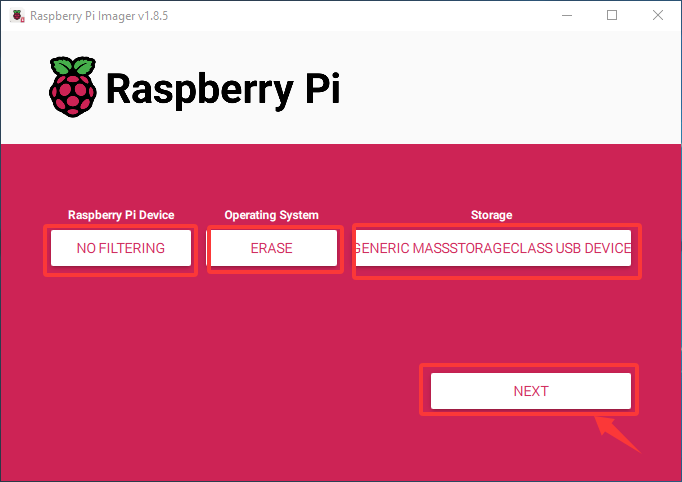
Schritt 3: Formatieren Sie Ihre microSD-Karte: Führen Sie Raspberry Pi Imager aus und wählen Sie “Löschen” im Feld Betriebssystem und “Ihre microSD-Karte” im Feld Speicher.
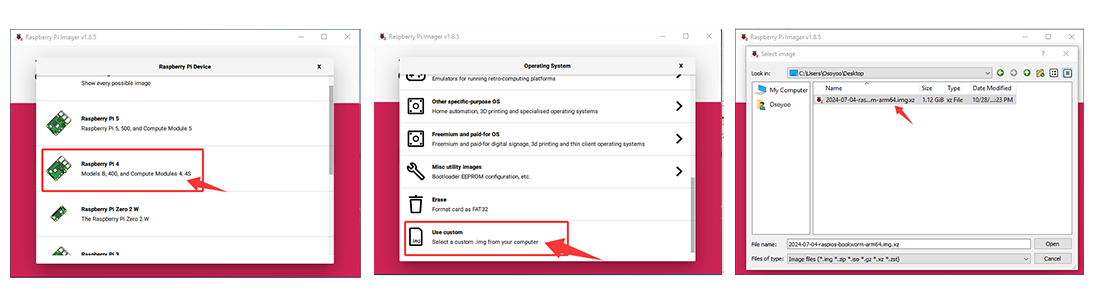
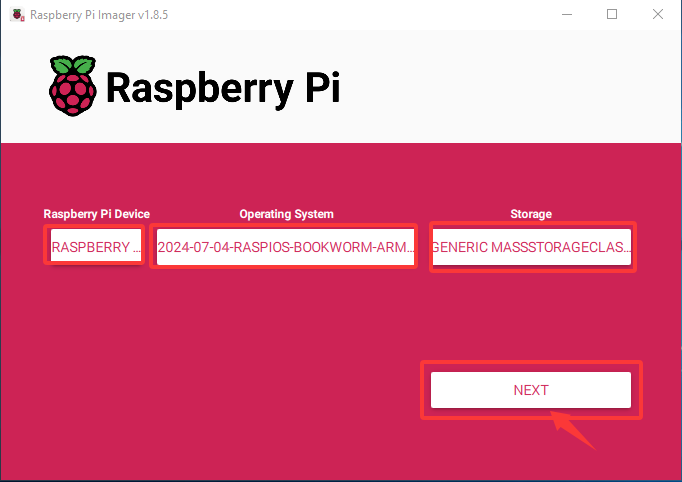
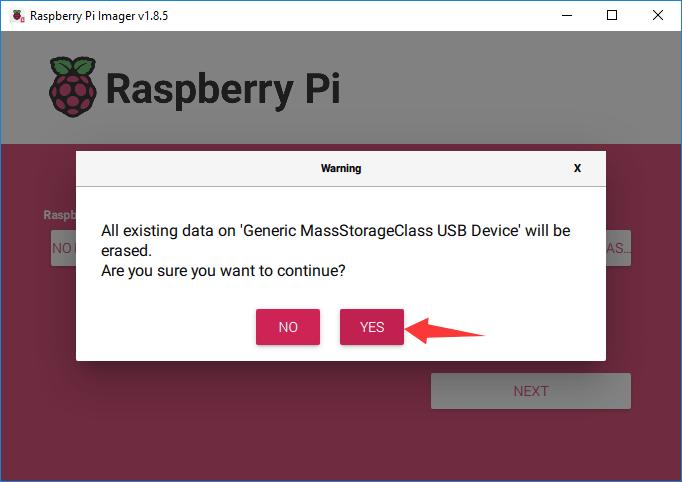
Schritt 4: Führen Sie Raspberry Pi Imager aus, wählen Sie Ihr Raspberry Pi 4 im Feld Gerät, dann wählen Sie “Benutzerdefiniert verwenden” im Feld Betriebssystem, navigieren Sie zum heruntergeladenen “Raspberry Pi OS” und wählen Sie dann “Ihre SD-Karte” im Feld Speicher. (Wenn Sie Raspberry Pi OS bereits auf Ihre SD-Karte gebrannt haben, überspringen Sie die Schritte 2-5).
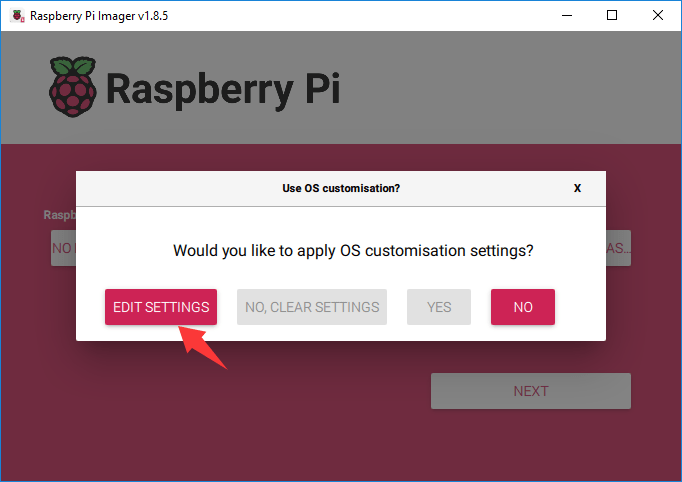
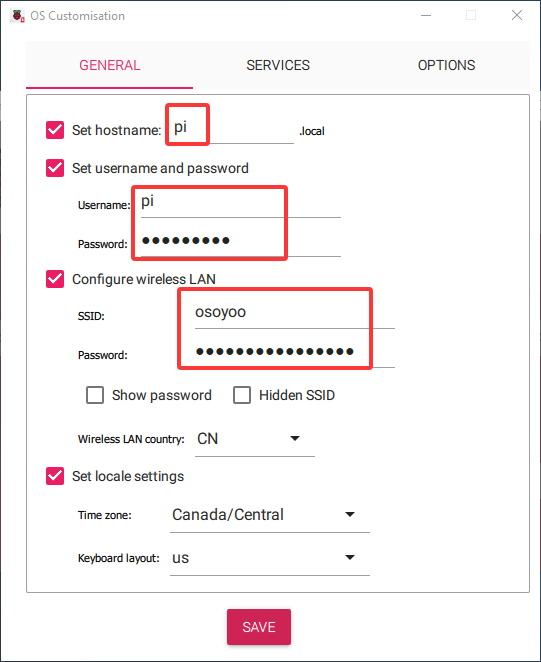
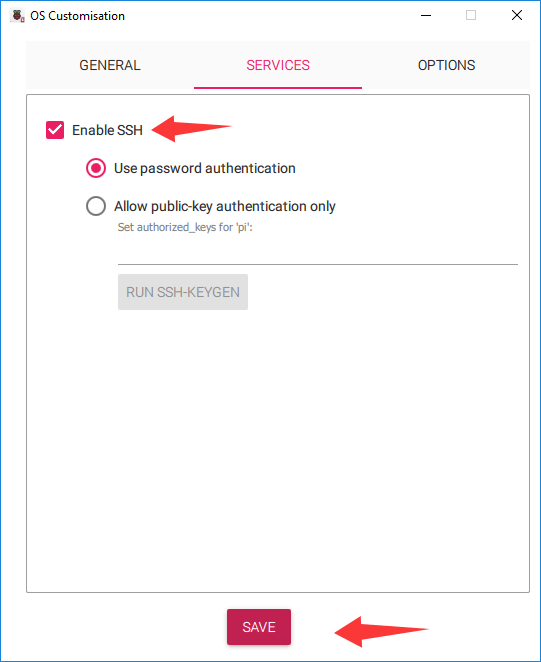
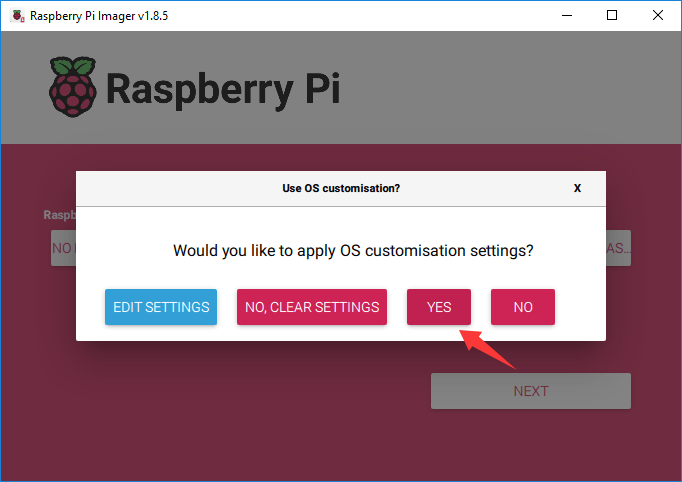
Schritt 5: Klicken Sie auf “EINSTELLUNGEN BEARBEITEN”, um den Benutzernamen und das Passwort zu konfigurieren (wir verwenden in diesem Beispiel “pi” als Benutzernamen und “raspberry” als Passwort), konfigurieren Sie das WLAN, klicken Sie dann auf DIENSTE, um SSH zu aktivieren, und klicken Sie abschließend auf “SPEICHERN”.
Fernsteuerung des Raspberry Pi
Schritt 1: IP-Adresse herausfinden
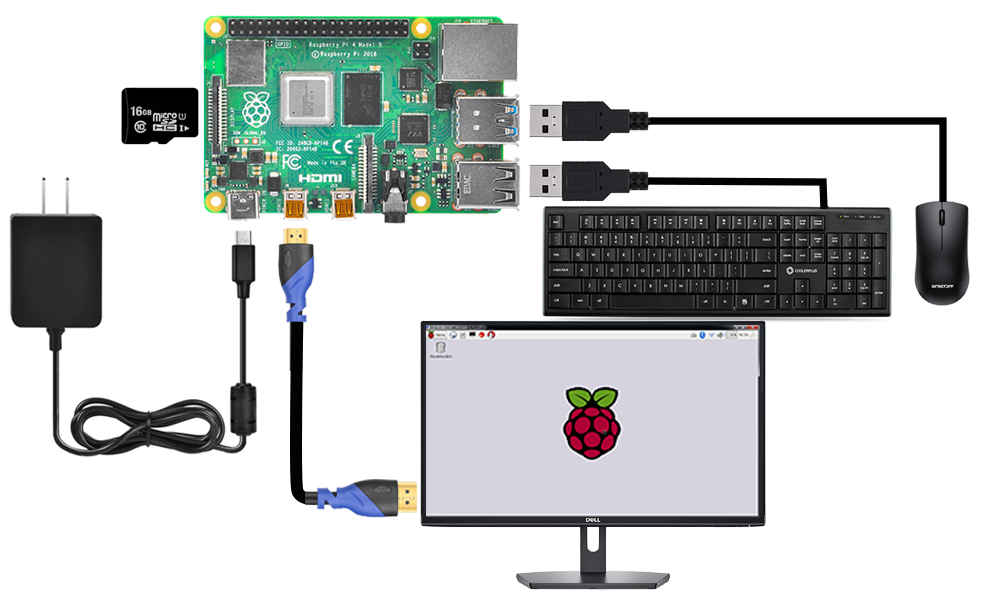
1. Schließen Sie den Raspberry Pi an Ihren HDMI-Monitor oder Fernseher an. Schließen Sie eine Tastatur und Maus an die USB-Ports des Raspberry Pi an. Stecken Sie die SD-Karte mit installiertem Betriebssystem in den Steckplatz Ihres Raspberry Pi (Wenn Sie Ihr Raspberry Pi-Roboterauto bereits installiert haben, schließen Sie es bitte an einen Bildschirm an, um die IP-Adresse herauszufinden.).
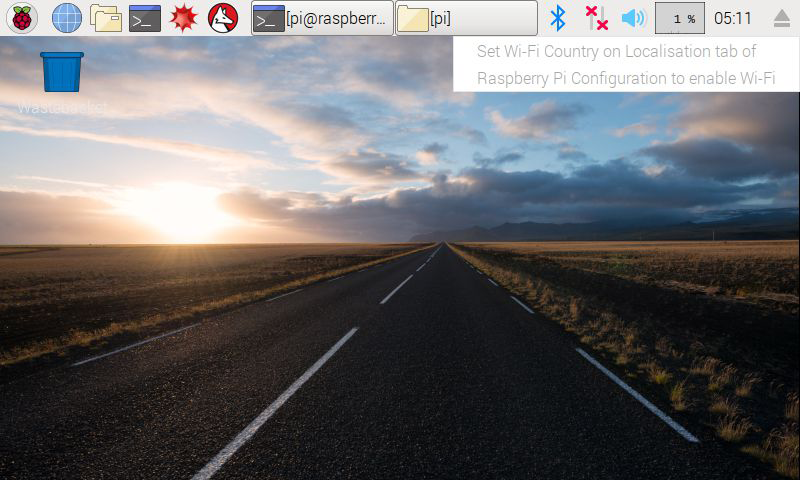
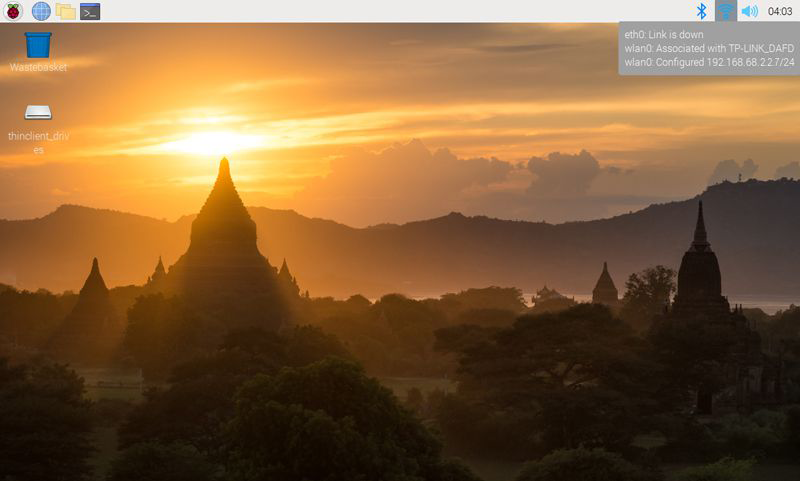
2. Wenn Sie mit der Maus über das LAN-Symbol fahren, erhalten Sie möglicherweise folgende Meldung:
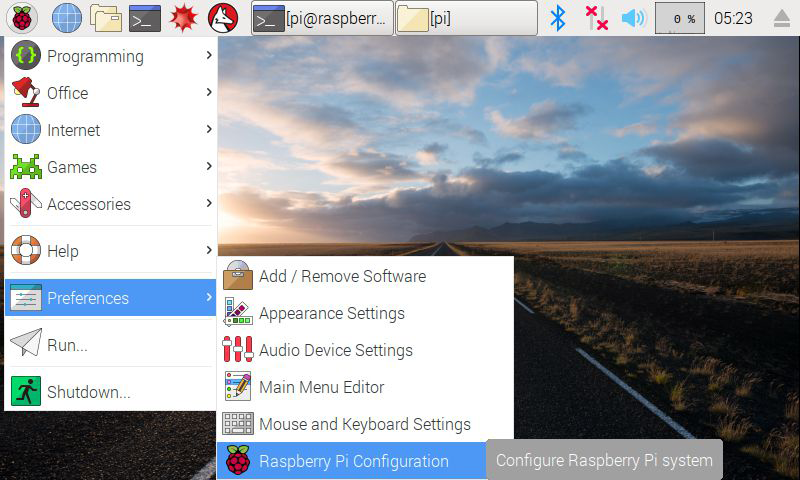
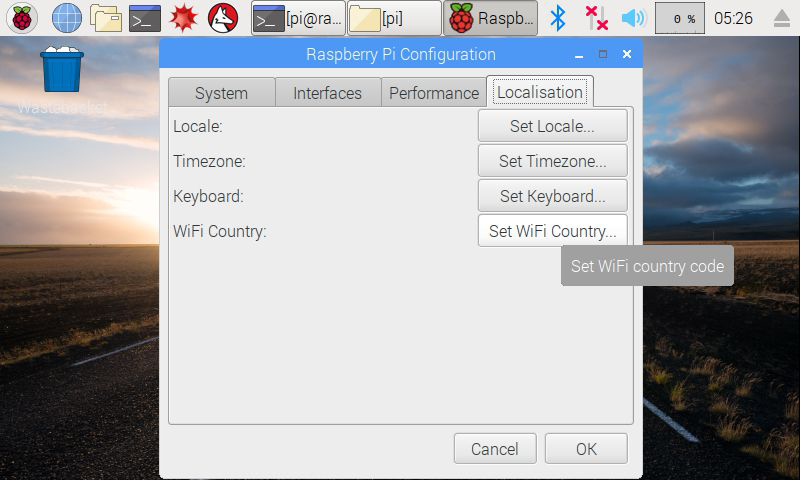
3. Klicken Sie, um die WLAN-Einstellungen wie folgt zu konfigurieren:
4.Finden Sie die IP-Adresse des Raspberry Pi heraus. Methode A: Schließen Sie Ihren Raspberry Pi an einen Monitor und eine Maus an, klicken Sie auf das LAN- oder WLAN-Symbol, um die IP-Adresse wie im folgenden Foto zu erhalten.
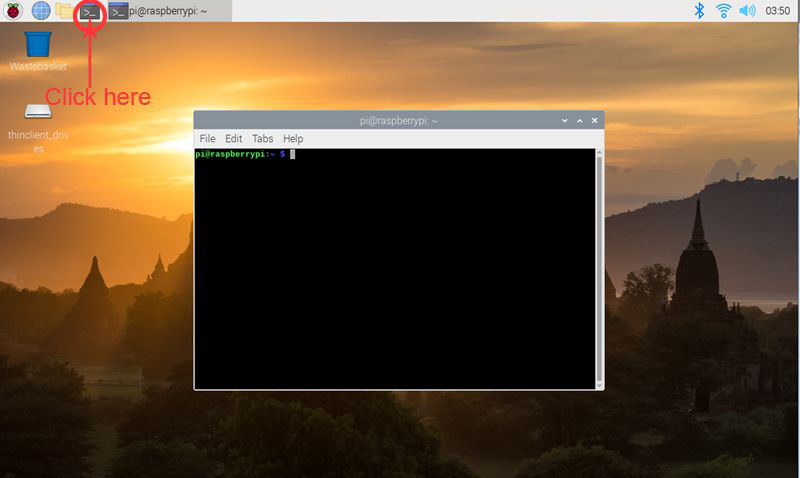
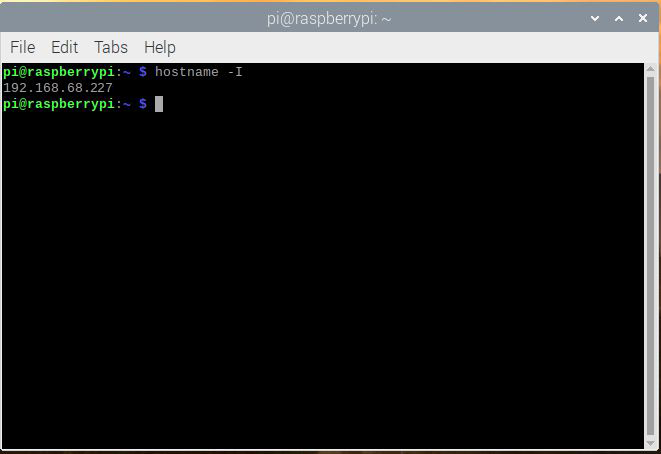
Methode B: Öffnen Sie das Terminal auf dem Bildschirm, geben Sie den folgenden Befehl im Terminalfenster ein, um Ihre IP-Adresse zu erhalten:
hostname -I
Schritt 2: Verwenden Sie einen SSH-Client, um den Raspberry Pi fernzusteuern.
1. Stecken Sie die SD-Karte mit installiertem Betriebssystem in die Raspberry Pi-Platine (vor dem Einstecken der SD-Karte schalten Sie den Raspberry Pi bitte zuerst aus) und schalten Sie dann das Roboterauto ein.
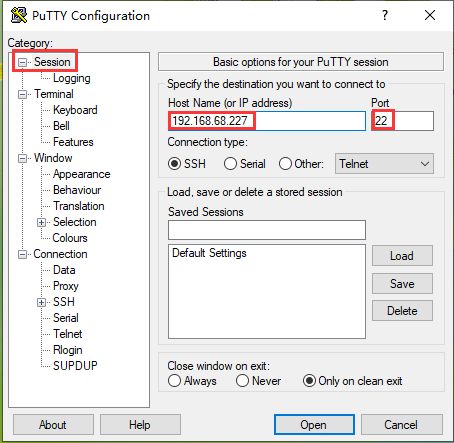
3. Öffnen Sie PuTTY und klicken Sie auf Sitzung in der baumähnlichen Struktur links (normalerweise beim Start von PuTTY zugeklappt), geben Sie die erhaltene IP-Adresse in das Textfeld unter Hostname pi (oder IP-Adresse 192.168.68.227) ein und 22 unter Port (Standard ist 22), dann klicken Sie auf Öffnen.
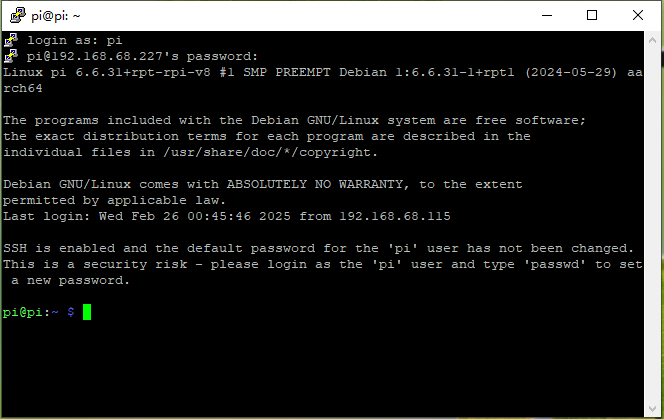
4. Hinweis: Wenn Sie sich zum ersten Mal mit der IP-Adresse beim Raspberry Pi anmelden, werden Sie an eine Sicherheitswarnung erinnert. Klicken Sie einfach auf Ja. Wenn das PuTTY-Fenster “login as:” anzeigt, geben Sie den Benutzernamen ein: pi und das Passwort: raspberry (das Standardpasswort, falls Sie es nicht geändert haben).
Hinweis: Wenn Sie das Passwort eingeben, zeigt das Fenster nichts an, aber Sie tippen tatsächlich ein. Konzentrieren Sie sich also auf die korrekte Eingabe und drücken Sie die Eingabetaste. Nach erfolgreicher Anmeldung am Raspberry Pi wird das Fenster wie folgt angezeigt:
Schritt 5: Stellen Sie das Roboterauto auf den Boden und führen Sie den folgenden Befehl aus:
python mecanum5.py
Nach Ausführung des obigen Python-Skripts bewegen sich Ihre Motoren 0,75 Sekunden vorwärts, dann 0,75 Sekunden rückwärts, drehen sich 0,75 Sekunden nach links, 0,75 Sekunden nach rechts, verschieben sich nach rechts, dann nach links, führen einige omnidirektionale Bewegungen aus und stoppen.
Am Ende dieser Lektion wird Ihr Raspberry Pi vollständig konfiguriert sein und Sie können das Roboterauto fernsteuern und Bewegungsbefehle ausführen ( python mecanum.py).
Das Auto bewegt sich in folgender Reihenfolge: vorwärts → rückwärts → parallele Rechtsverschiebung → parallele Linksverschiebung → diagonale Links-Vorwärtsbewegung → zurück zum Ausgangspunkt → diagonale Rechts-Vorwärtsbewegung → zurück zum Ausgangspunkt → Linksdrehung → Rechtsdrehung → und stoppt schließlich.
Fehlerbehebung
Wenn Sie nach Ausführung des Lektion-1-Codes feststellen, dass die Räder auf einer Seite sich nicht drehen oder sich nur vorwärts, aber nicht rückwärts oder nur rückwärts, aber nicht vorwärts bewegen können, liegt das Problem wahrscheinlich an einem lockeren oder gebrochenen Kabel im 6-poligen Kabel, das mit der Model X-Platine verbunden ist.
Hier ist die Lösung:
Schritt 1: Trennen Sie das 6-polige Kabel, das die Model Y-Platine und die Arduino-Platine verbindet.
Schritt 2: Suchen Sie sechs (6) einzelne Ersatz-Jumper-Kabel (beliebige Farbe) aus Ihrem Kit.
Schritt 3: Verwenden Sie diese sechs einzelnen Jumper-Kabel, um die Pins der Model Y-Platine (ENA, IN1, IN2, IN3, IN4, ENB) gemäß der vorherigen Model Y-Kabelführung manuell mit den entsprechenden Pins auf dem Arduino zu verbinden.
Schritt 4: Testen Sie den Lektion-1-Code erneut, um zu sehen, ob das Problem behoben ist. Wenn das Problem weiterhin besteht, können Sie Ihre Problemdetails an [email protected] senden und unser Techniksupport-Team wird Ihnen helfen.