In questa lezione ti guideremo nell’installazione e configurazione del sistema operativo Raspberry Pi, insieme al software e alle librerie necessarie per controllare la tua Auto Robot con Ruote Mecanum OSOYOO.
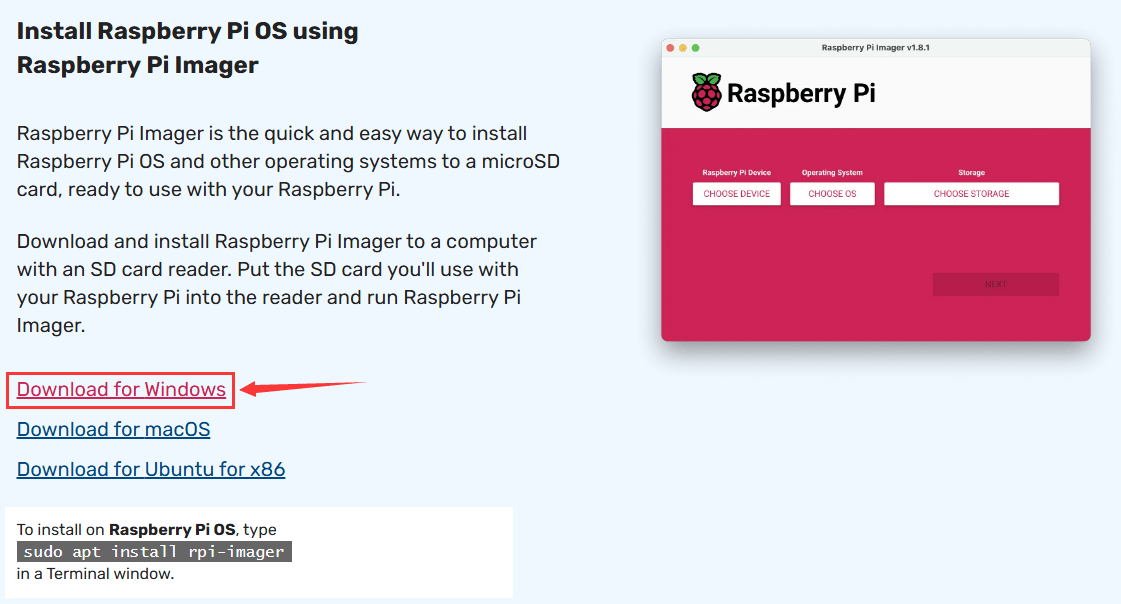
Nota: qui prendiamo come esempio Raspberry Pi Imager v1.8.5 per installare il sistema operativo; altre versioni potrebbero presentare alcune differenze. (Dispositivo: Raspberry Pi 4B)
Passo 1: Prepara una scheda microSD (scheda TF) appena formattata con un lettore USB per microSD; le dimensioni consigliate sono 16GB, 32GB. (Salta questo passaggio se la tua scheda SD ha già un’immagine del sistema operativo Rasbian preinstallata).
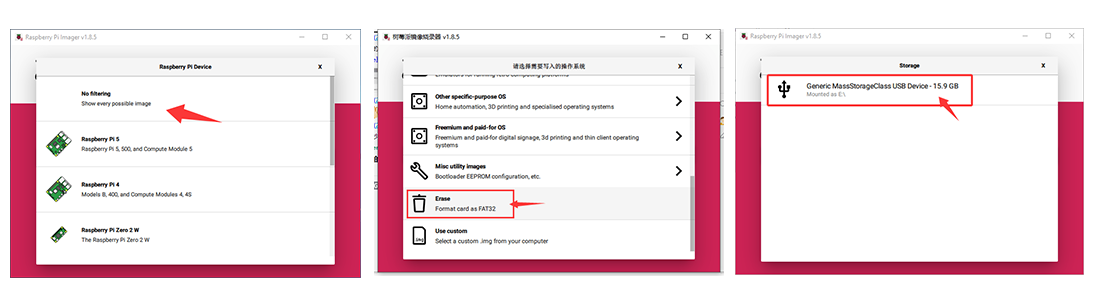
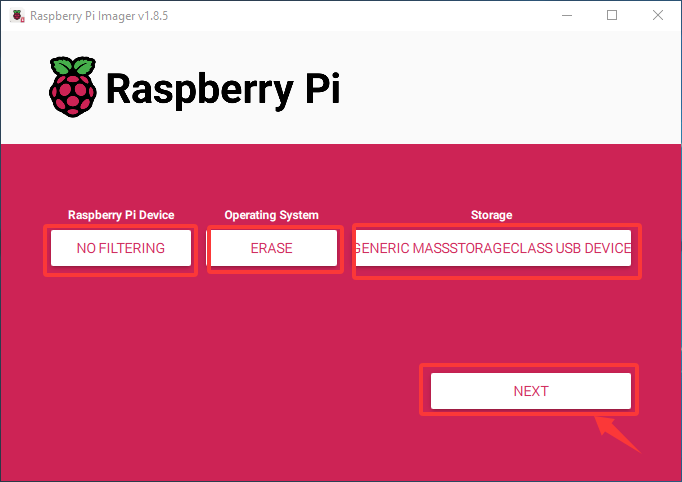
Passo 3: Formatta la tua scheda microSD: Esegui Raspberry Pi Imager e seleziona “Cancella” nel campo Sistema Operativo e “la tua scheda microSD” nel campo Memoria.
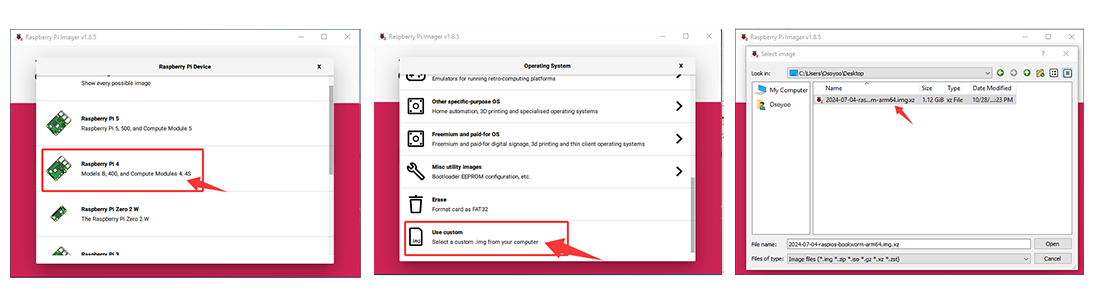
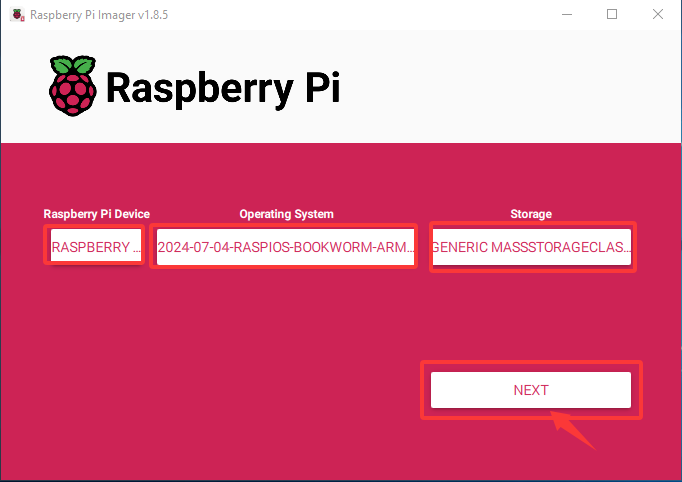
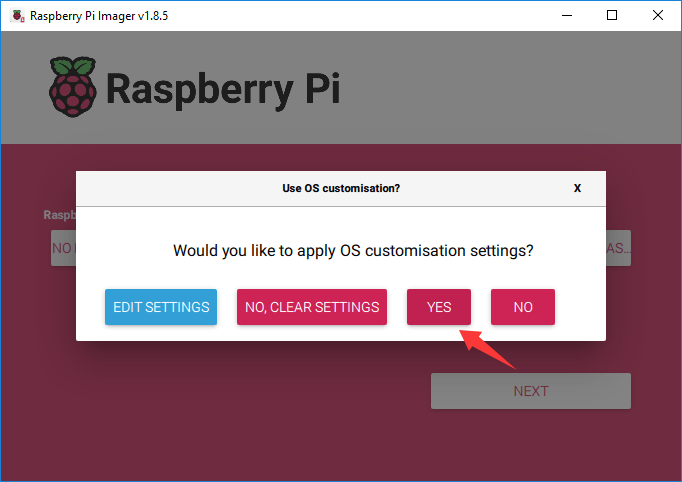
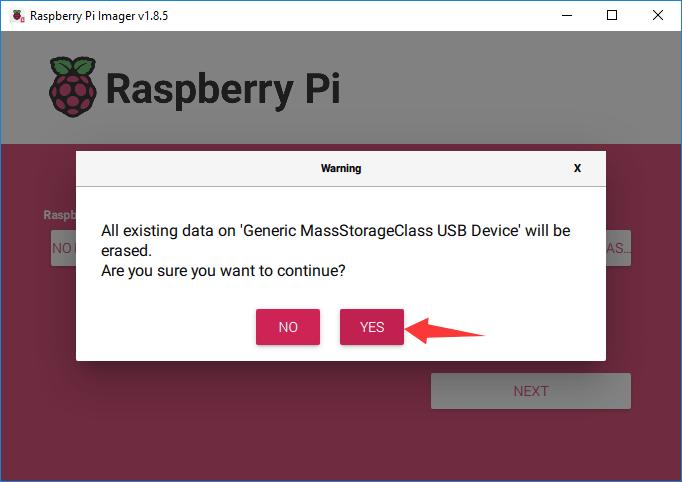
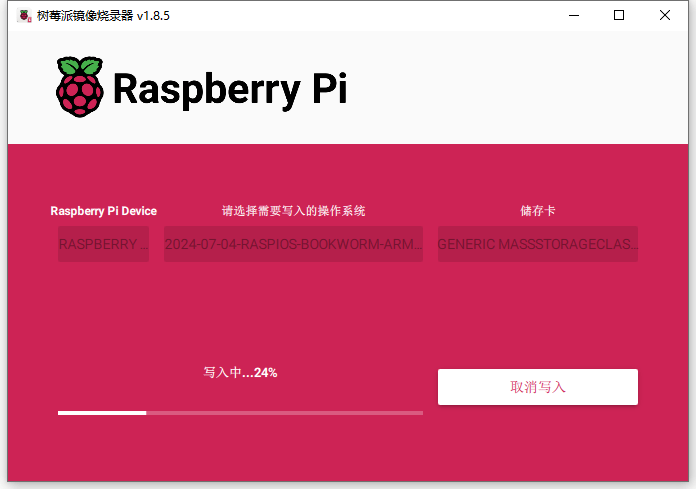
Passo 4: Esegui Raspberry Pi Imager, seleziona il tuo Raspberry Pi 4 nel campo Dispositivo, poi seleziona “Usa personalizzato” nel campo Sistema Operativo, quindi cerca il “Raspberry Pi OS” che hai scaricato e infine seleziona “la tua scheda SD” nel campo Memoria. (Se hai già masterizzato il Raspberry Pi OS sulla tua scheda SD, salta i passaggi 2-5).
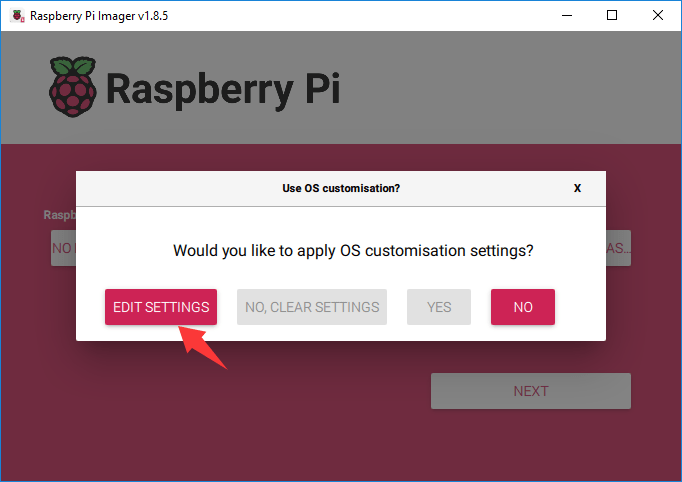
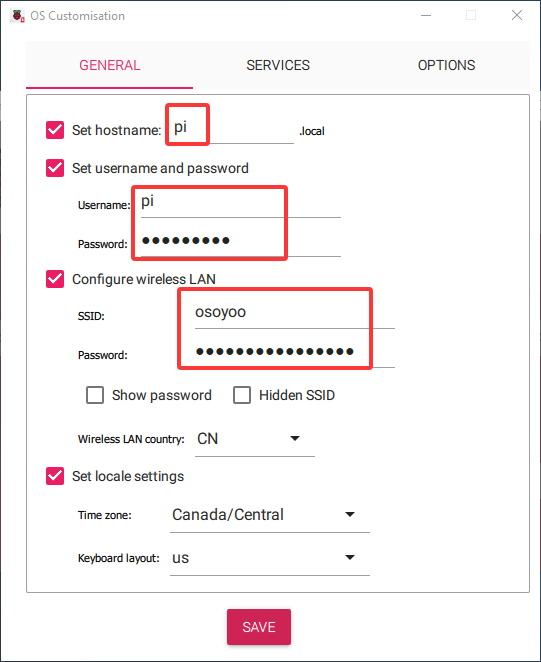
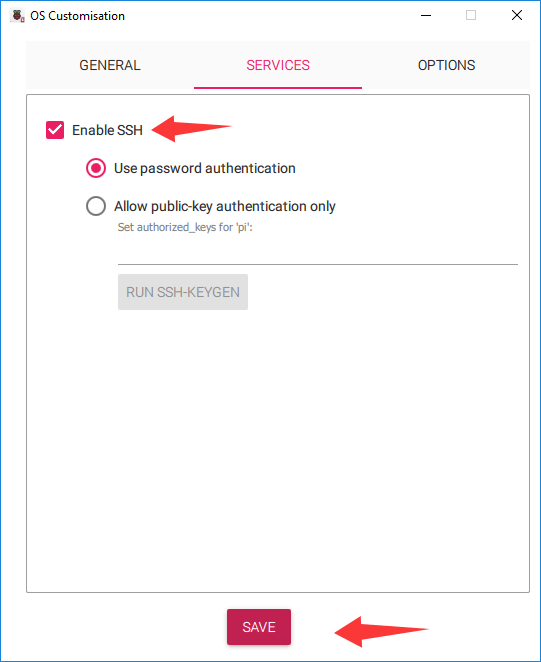
Passo 5: Clicca su “MODIFICA IMPOSTAZIONI” per configurare nome utente e password (in questo esempio usiamo “pi” come nome utente e “raspberry” come password), configura la rete LAN wireless, poi clicca su SERVIZI per abilitare SSH, infine clicca su “SALVA”.
Controllo Remoto di Raspberry Pi
Passo 1: Trovare l’indirizzo IP
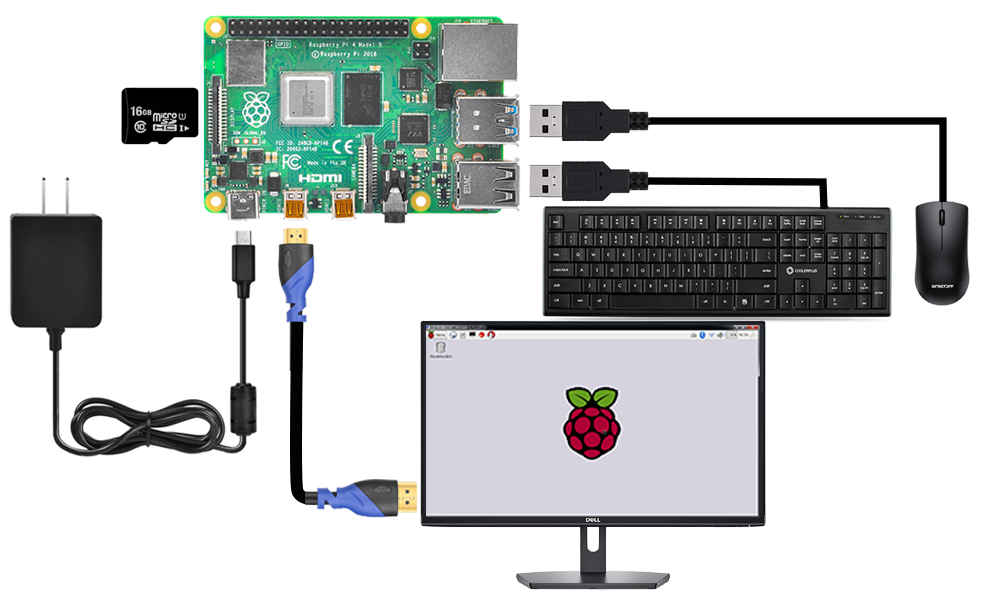
Collega il Raspberry Pi a un monitor o TV HDMI. Collega una tastiera e un mouse alle porte USB del Raspberry Pi. Inserisci la scheda SD con il sistema operativo installato nello slot del Raspberry Pi (Se hai già installato il tuo robot auto Raspberry Pi, per favore collegalo a uno schermo per trovare l’indirizzo IP.).
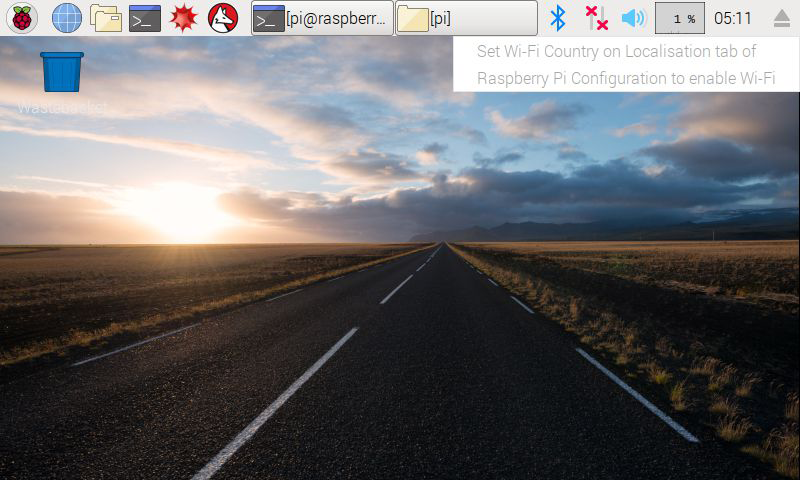
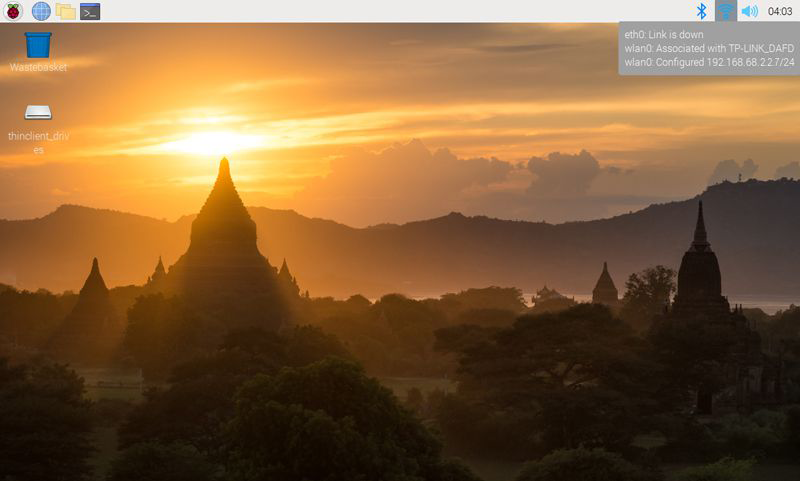
2. Se passi il mouse sull’icona LAN, potresti vedere una notifica come la seguente:
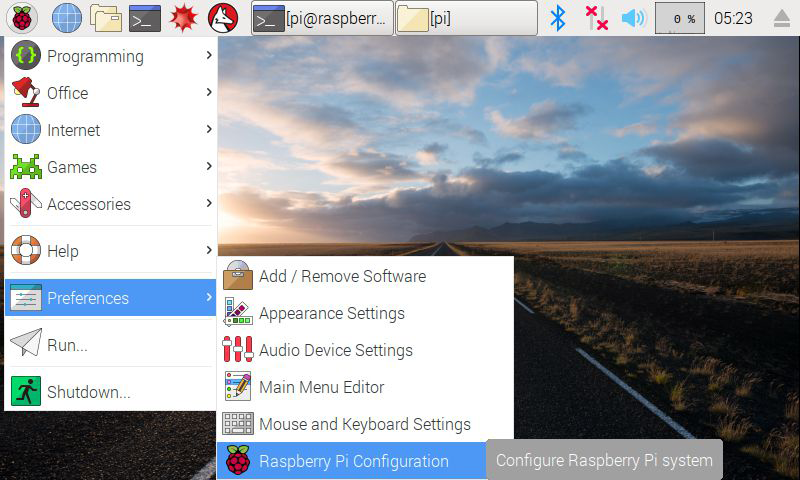
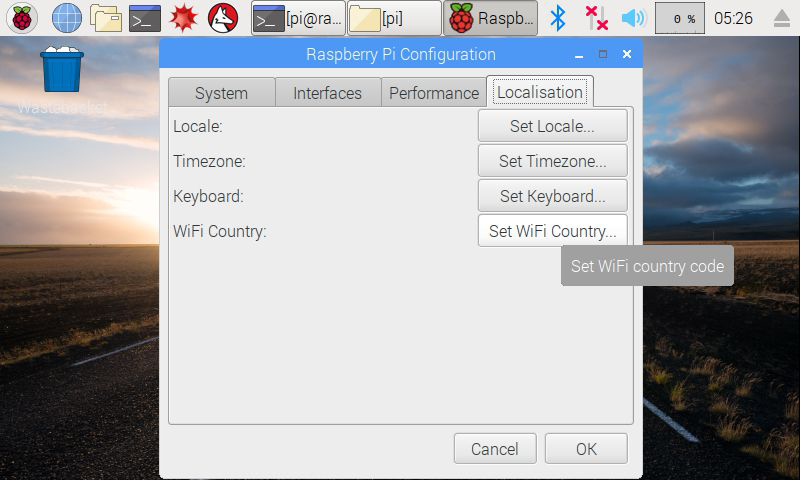
3. Clicca per configurare le impostazioni Wi-Fi come segue:
4. Trova l’indirizzo IP del Raspberry Pi.
Metodo A: Collega il tuo Raspberry Pi a un monitor e mouse, clicca sull’icona LAN o Wi-Fi per ottenere l’indirizzo IP come nella foto seguente.
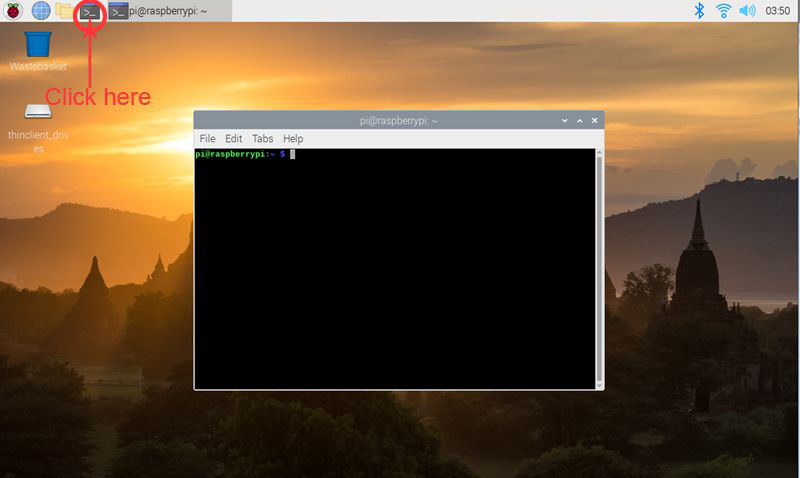
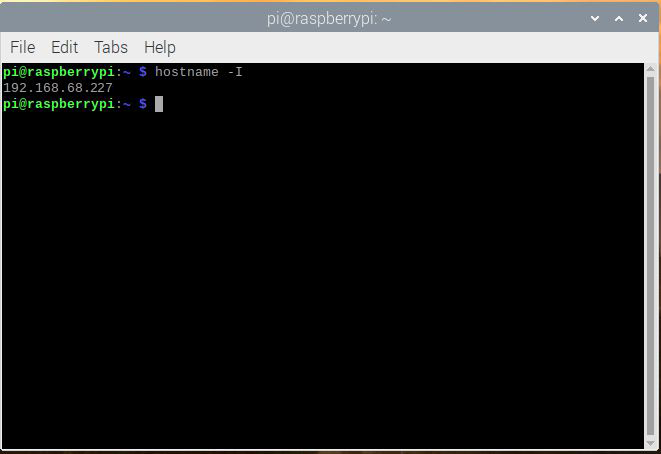
Metodo B: Apri il Terminale sullo schermo, inserisci il seguente comando nella finestra del terminale per ottenere il tuo indirizzo IP:
hostname -I
Passo 2: Utilizzare un client SSH per controllare il Raspberry Pi da remoto.
1. Inserisci la scheda SD con il sistema operativo installato nella scheda Raspberry Pi (Prima di inserire la scheda SD, spegni prima il Raspberry Pi), poi accendi l’auto robot.
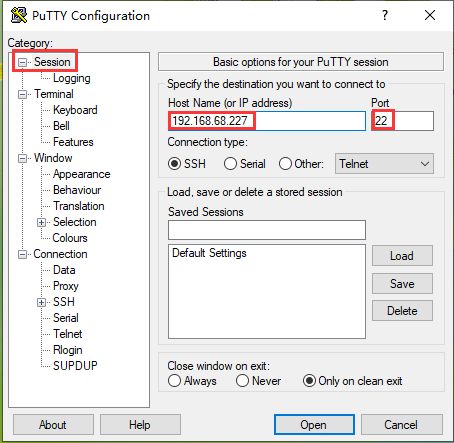
3. Apri PuTTY e clicca su Sessione nella struttura ad albero a sinistra (di solito è chiusa all’avvio di PuTTY), inserisci l’indirizzo IP ottenuto nella casella di testo sotto Nome Host pi (o indirizzo IP 192.168.68.227) e 22 sotto Porta (di default è 22), poi clicca su Apri.
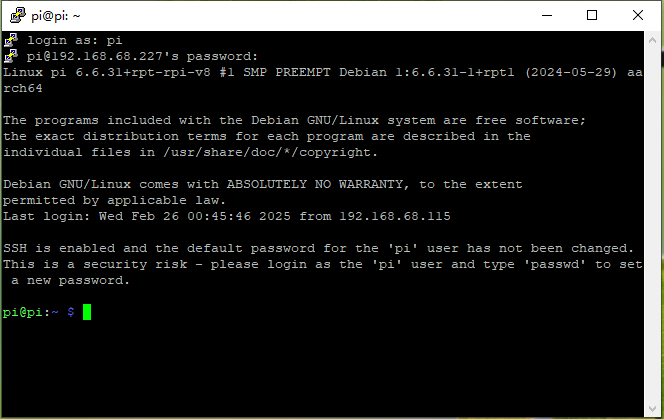
4. Nota: quando accedi per la prima volta al Raspberry Pi con l’indirizzo IP, apparirà un promemoria di sicurezza. Clicca semplicemente su Sì. Quando la finestra di PuTTY richiede “login as:”, inserisci il nome utente: pi e la password: raspberry (quella predefinita, se non l’hai cambiata).
Nota: quando digiti la password, la finestra non mostra nulla, ma in realtà stai digitando. Concentrati quindi su una digitazione corretta e premi Invio. Dopo aver effettuato l’accesso al Raspberry Pi con successo, la finestra si presenterà come segue:
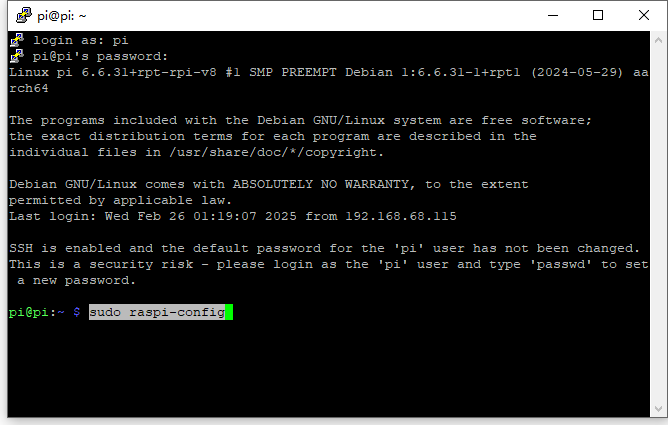
Passo 5: Posiziona l’auto robot sul pavimento ed esegui il seguente comando:
python mecanum5.py
Dopo l’esecuzione dello script Python sopra, i tuoi motori si muoveranno in avanti per 0,75 secondi, poi indietro per 0,75 secondi, gireranno a sinistra per 0,75 secondi, a destra per 0,75 secondi, si sposteranno a destra, poi a sinistra, eseguiranno alcuni movimenti omnidirezionali e si fermeranno.
Al termine di questa lezione, il tuo Raspberry Pi sarà completamente configurato e sarai in grado di controllare da remoto l’auto robot ed eseguire comandi di movimento (python mecanum.py).
L’auto si muoverà nella seguente sequenza: avanti → indietro → spostamento parallelo a destra → spostamento parallelo a sinistra → diagonale avanti-sinistra → ritorno al punto originale → diagonale avanti-destra → ritorno al punto originale → gira a sinistra → gira a destra → e infine si ferma.
Risoluzione dei Problemi
Se, dopo aver eseguito il codice della Lezione 1, noti che le ruote di un lato non girano, o le ruote di un lato possono solo muoversi in avanti ma non indietro, o solo indietro ma non in avanti, il problema è probabilmente un cavo allentato o rotto nel cavo a 6 pin che collega la scheda Model Y.
Here is the solution:
Ecco la soluzione:
Passo 1: Scollega il cavo a 6 pin che collega la scheda Model Y e la scheda Arduino.
Passo 2: Prendi sei (6) cavi jumper femmina-maschio di riserva dal tuo kit (di qualsiasi colore vada bene).
Passo 3: Usa questi sei cavi jumper singoli per riconnettere manualmente i pin della scheda Model Y (ENA, IN1, IN2, IN3, IN4, ENB) ai corrispondenti pin su Arduino, secondo la mappa dei cavi della Model Y precedente.
Passo 4: Ripeti il test del codice della Lezione 1 per vedere se il problema è risolto. Se il problema persiste, puoi inviare i dettagli del tuo problema a [email protected] e il nostro team di supporto tecnico ti aiuterà.