


I. Objetivo
II.Partes y Dispositivos
III. Instalación de Hardware
IV.Instalación de Software
VI.Cómo Utilizar
VI. Resolución de Problemas

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

En esta lección realizaremos un proyecto de conducción autónoma con evitamiento de obstáculos. Utilizamos un módulo ultrasónico para “ver” el obstáculo, y el coche girará automáticamente para evitarlo.
Debe completar la Lección 1 antes de continuar con esta lección.

Componentes:
Chasis de coche robótico con ruedas Mecanum OSOYOO x1
Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 / ruedas derechas x2)
Placa Raspberry Pi 4/5 (no incluida en el kit)
Shield OSOYOO PWM HAT x1
Placa controladora OSOYOO Model Y x1
Voltímetro OSOYOO x1
Servomotor MG90 OSOYOO x1
Módulo sensor ultrasónico OSOYOO x1
Soporte de montaje OSOYOO x1
Portapilas OSOYOO x1
Cable jumper hembra-hembra de 3 pines OSOYOO x1
Cables jumper hembra-hembra de 6 pines OSOYOO x2
Cable jumper hembra-hembra de 10 pines OSOYOO x1
Cable XH2.54 hembra-hembra de 2 pines OSOYOO x1
Pilas 18650 (3,7 V) x2
Cargador de pilas x1

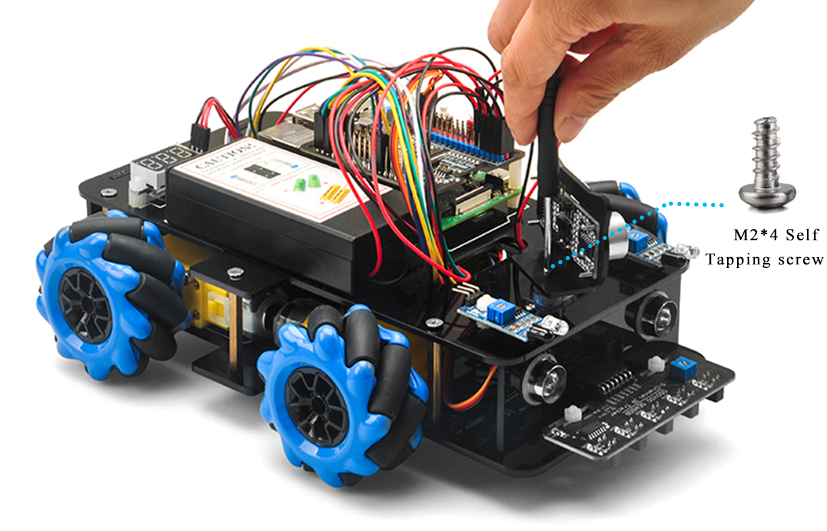
Paso 1. Monte el módulo ultrasónico en el soporte usando cuatro tornillos M1,5 × 8 mm y cuatro tuercas M1,5.

Paso 2. Instale el soporte para el módulo ultrasónico en el servomotor SG90 con tornillos autorroscantes M2*4 o los tornillos del kit de tornillos del servomotor SG90.
Paso 3. Mantenga todas las conexiones de la Lección 1 sin cambios.
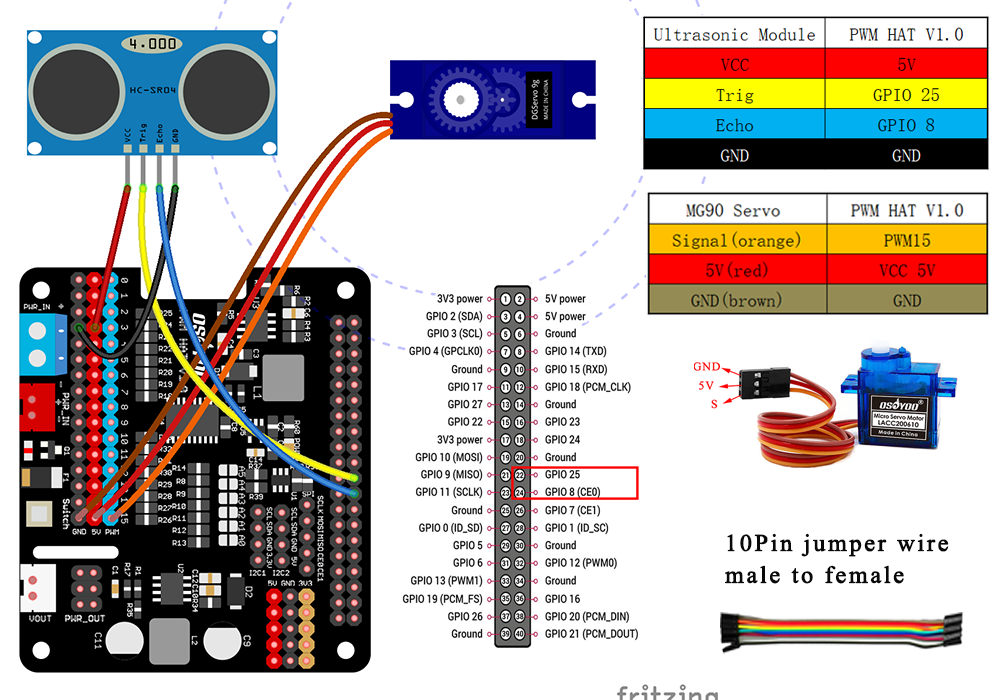
Conecte el servomotor SG90 y el módulo ultrasónico al shield OSOYOO PWM HAT como se indica.
Nota: Debe separar 4 cables jumper hembra-hembra de nuestro paquete de 10 cables. Cualquier color del paquete es válido. Los cables restantes sirven como repuestos para posibles cables rotos o dañados.

Conecte el Raspberry Pi 4 mediante un cable USB-C a la PC. Abra PuTTY e ingrese la dirección IP (o el Nombre de host “pi”) y 22 en Puerto (por defecto es 22), luego haga clic en Abrir.
Use la herramienta SSH para controlar el Raspberry Pi de forma remota en otra PC con sistema operativo. Ejecute el Código de Ejemplo con el siguiente comando:
wget https://osoyoo.com/driver/mecanum/mecanum_oa5.py
python mecanum_oa5.py
Alineación Inicial del Servo del Sensor Ultrasónico
El servo realizará algunos movimientos y finalmente se detendrá en dirección frontal durante 3 segundos.
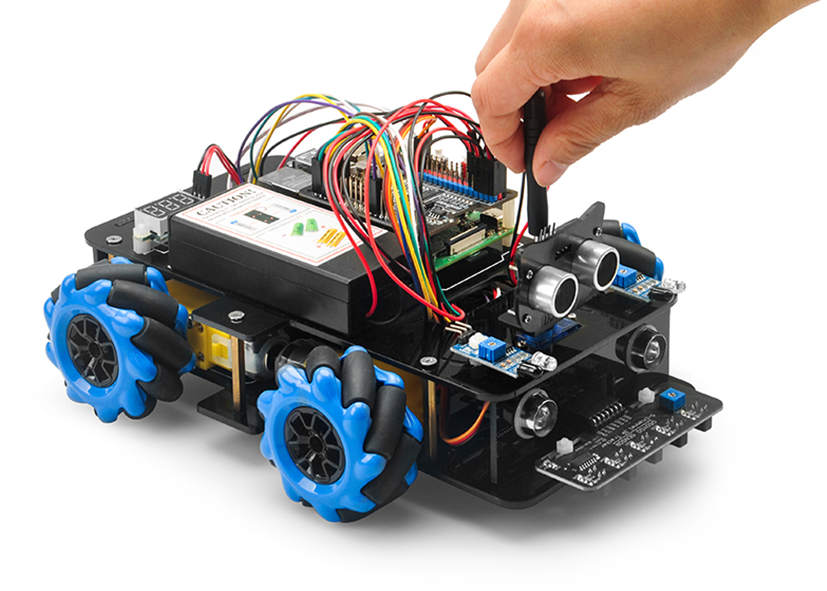
Si el sensor ultrasónico no mira hacia el frente durante estos primeros 3 segundos, apague inmediatamente la batería y retire el sensor del servo. Reinstálelo orientándolo recto hacia adelante como en la siguiente imagen. De lo contrario, el programa de evitamiento de obstáculos no funcionará correctamente.
Después de ajustar la dirección del sensor, encienda nuevamente la batería. El sensor debe mirar hacia el frente como en la siguiente imagen. Si la dirección no es recta hacia adelante, apague la batería y repita la alineación.
Prueba Final:
Después de encender el interruptor de la batería, si el módulo ultrasónico gira a la posición frontal, significa que no necesita ajustar más la posición del sensor. Solo espere 3 segundos. Si no se detecta ningún obstáculo, el coche avanzará. Si se detectan obstáculos, el coche se detendrá y el módulo ultrasónico girará de derecha a izquierda para detectar obstáculos circundantes. El robot decidirá girar a la izquierda, a la derecha o retroceder según los datos del sensor y nuestro algoritmo de evitamiento de obstáculos.
A veces, una colisión puede cambiar la posición del sensor ultrasónico. En ese caso, recuerde realizar nuevamente la alineación de dirección según la sección “Alineación Inicial del Servo del Sensor Ultrasónico”.

Para ejecutar el código de ejemplo de forma remota mediante SSH, use el comando:
python mecanum_oa5.py








