


I.Ziel
II. Teile und Geräte
III.Hardware-Installation
IV. Software-Installation
V.Bedienung
VI. Fehlerbehebung

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

In dieser Lektion führen wir ein Projekt zur autonomen Hindernisvermeidung durch. Wir verwenden ein Ultraschallmodul, um Hindernisse zu “sehen”, und das Auto wird automatisch an ihnen vorbeifahren.
Sie müssen Lektion 1 abschließen, bevor Sie mit dieser Lektion fortfahren.

Komponenten:
OSOYOO Mecanum-Rad Roboterauto-Chassis x1
OSOYOO Räder und Motoren x4 (Linksräder x2 / Rechtsräder x2)
Raspberry Pi 4/5-Platine (nicht im Kit enthalten)
OSOYOO PWM HAT Shield x1
OSOYOO Model Y Treiberplatine x1
OSOYOO Spannungsmesser x1
OSOYOO MG90 Servomotor x1
OSOYOO Ultraschallsensor-Modul x1
OSOYOO Montagehalterung x1
OSOYOO Batteriebox x1
OSOYOO 3-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO 6-polige Jumperkabel (weiblich-weiblich) x2
OSOYOO 10-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO XH2.54 2-poliges Kabel (weiblich-weiblich) x1
18650-Batterien (3,7 V) x2
Batterieladegerät x1

Schritt 1. Montieren Sie das Ultraschallmodul mit vier M1,5×8 mm Schrauben und vier M1,5 Muttern auf der Halterung.

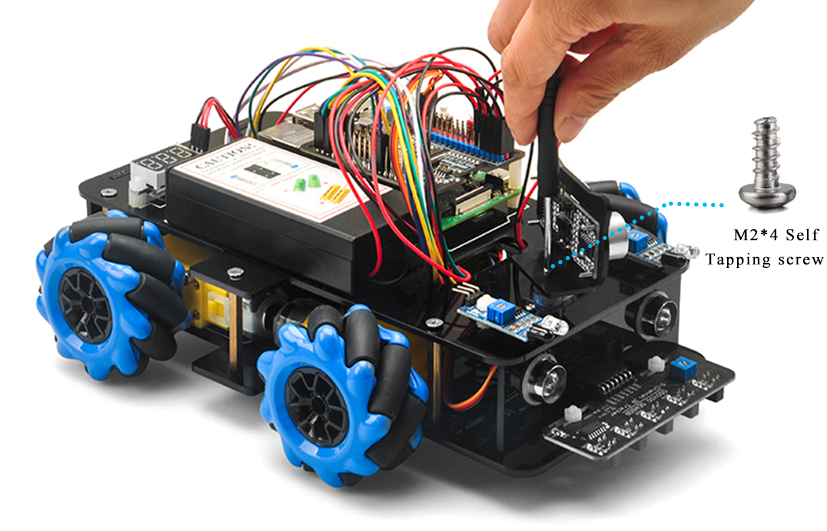
Schritt 2. Installieren Sie die Halterung für das Ultraschallmodul am SG90-Servomotor mit M2*4 Selbstschneidschrauben oder den Schrauben aus dem SG90-Servo-Schraubensatz.
Schritt 3. Belassen Sie alle Verbindungen aus Lektion 1 unverändert.
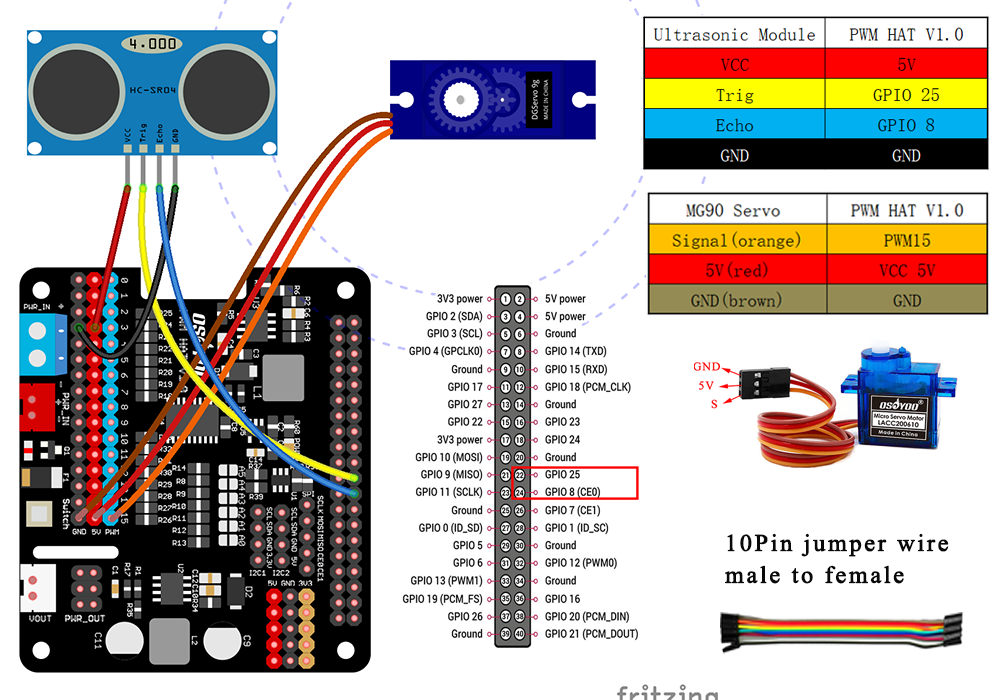
Verbinden Sie den SG90-Servomotor und das Ultraschallmodul wie folgt mit dem OSOYOO PWM HAT Shield.
Hinweis: Sie müssen 4 einzelne Jumperkabel (weiblich-weiblich) aus unserem 10-teiligen Kabelbündel entnehmen. Jede Farbe aus dem Bündel ist geeignet. Die restlichen Kabel dienen als Ersatz für mögliche beschädigte Kabel..

Verbinden Sie den Raspberry Pi 4 über ein USB-C-Kabel mit dem PC. Öffnen Sie PuTTY und geben Sie die IP-Adresse (oder den Hostnamen “pi”) und unter Port 22 (Standard ist 22) ein, klicken Sie dann auf Öffnen.
Verwenden Sie das SSH-Tool, um den Raspberry Pi aus der Ferne auf einem anderen PC mit Betriebssystem zu steuern. Führen Sie den Beispielcode mit dem folgenden Befehl aus:
wget https://osoyoo.com/driver/mecanum/mecanum_oa5.py python mecanum_oa5.py
Anfängliche Servoausrichtung des Ultraschallsensors
Der Servo führt einige Bewegungen aus und stoppt schließlich für 3 Sekunden in Vorwärtsrichtung.
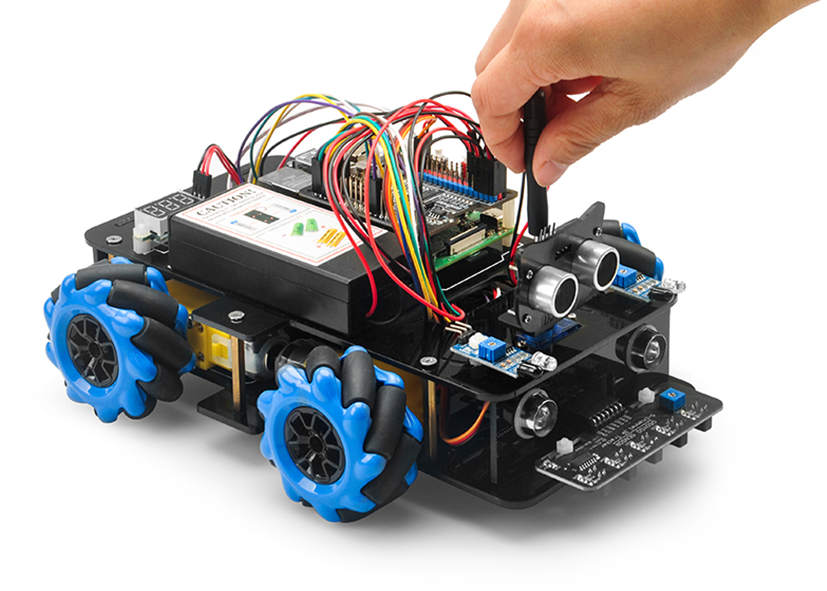
Wenn der Ultraschallsensor in den ersten 3 Sekunden nicht nach vorne zeigt, schalten Sie sofort die Batterie aus und entfernen Sie den Sensor vom Servo. Installieren Sie ihn neu und richten Sie ihn geradeaus wie im folgenden Bild aus. Andernfalls funktioniert das Hindernisvermeidungsprogramm nicht richtig.
Nach dem Einstellen der Sensorrichtung schalten Sie die Batterie wieder ein. Der Sensor sollte wie im folgenden Bild nach vorne zeigen. Falls die Richtung nicht geradeaus ist, schalten Sie die Batterie aus und wiederholen Sie die Ausrichtung.
Endgültiger Test: :
Nach dem Einschalten des Batterieschalters: Wenn sich das Ultraschallmodul in die vordere Blickposition dreht, bedeutet dies, dass Sie die Sensorposition nicht weiter anpassen müssen. Warten Sie einfach 3 Sekunden. Wenn kein Hindernis erkannt wird, fährt das Auto vorwärts. Bei Hinderniserkennung stoppt das Auto, und das Ultraschallmodul dreht von rechts nach links, um umgebende Hindernisse zu erfassen. Das Roboterauto entscheidet basierend auf den Sensordaten und unserem Hindernisvermeidungsalgorithmus, ob es links abbiegt, rechts abbiegt oder rückwärts fährt.
Bei Kollisionen kann sich die Position des Ultraschallsensors verschieben. Vergessen Sie in diesem Fall nicht, die Sensorausrichtung gemäß der Anleitung “Anfängliche Servoausrichtung des Ultraschallsensors” erneut durchzuführen.

Zum Ausführen des Beispielcodes aus der Ferne über SSH verwenden Sie den Befehl:
python mecanum_oa5.py








