


I. Obiettivo
II. Parti e Dispositivi
III.Installazione Hardware
IV.Installazione Software
VI.Come Utilizzare
VI. Risoluzione Problemi

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

In questa lezione realizzeremo un progetto di guida autonoma con evitamento ostacoli. Utilizzeremo un modulo ultrasonico per “vedere” l’ostacolo, e l’auto svolterà automaticamente per evitarlo.
È necessario completare la Lezione 1 prima di proseguire con questa lezione.

Componenti:
Chassis auto robotica con ruote Mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistra x2 / ruote destra x2)
Scheda Raspberry Pi 4/5 (non inclusa nel kit)
Shield OSOYOO PWM HAT x1
Scheda di controllo OSOYOO Model Y x1
Voltmetro OSOYOO x1
Servomotore MG90 OSOYOO x1
Modulo sensore ultrasonico OSOYOO x1
Supporto di montaggio OSOYOO x1
Portabatterie OSOYOO x1
Cavo jumper femmina-femmina a 3 pin OSOYOO x1
Cavi jumper femmina-femmina a 6 pin OSOYOO x2
Cavo jumper femmina-femmina a 10 pin OSOYOO x1
Cavo XH2.54 femmina-femmina a 2 pin OSOYOO x1
Batterie 18650 (3,7V) x2
Caricabatterie x1

Passo 1. Montare il modulo ultrasonico sul supporto utilizzando quattro viti M1.5×8 mm e quattro dadi M1.5.

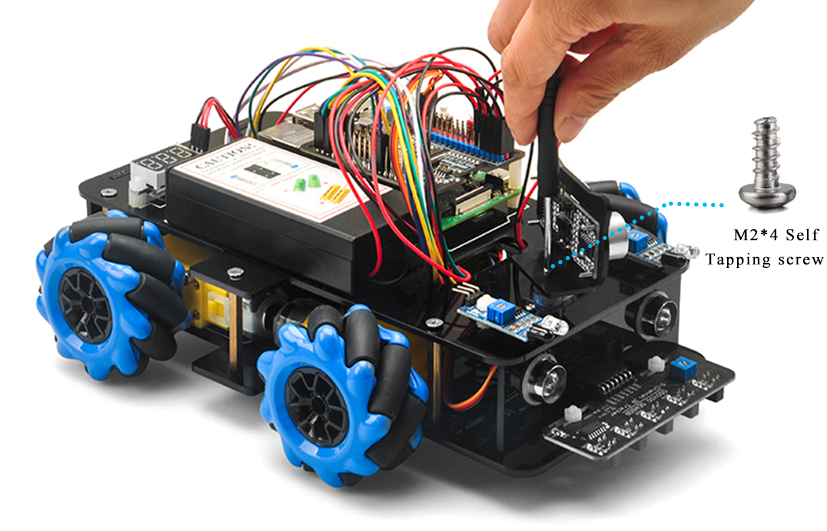
Passo 2. Installare il supporto per il modulo ultrasonico sul servomotore SG90 con viti autofilettanti M2*4 o le viti fornite nel kit del servomotore SG90.
Passo 3. Mantenere tutte le connessioni della Lezione 1 invariate.
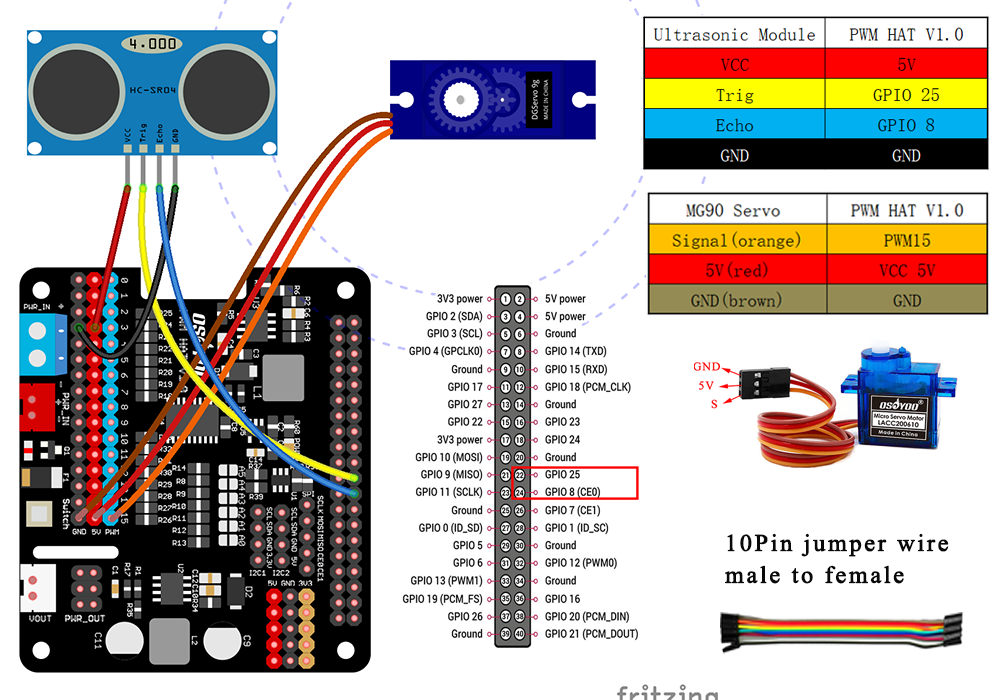
Collegare il servomotore SG90 e il modulo ultrasonico allo shield OSOYOO PWM HAT come segue.
Nota: È necessario separare 4 cavi jumper femmina-femmina dal bundle da 10 cavi. Qualsiasi colore del bundle va bene. I cavi rimanenti fungono da pezzi di ricambio per eventuali cavi rotti o danneggiati.

Collegare il Raspberry Pi 4 tramite cavo USB-C al PC. Aprire PuTTY e inserire l’indirizzo IP (o Nome Host “pi”) e 22 sotto Porta (predefinito è 22), quindi fare clic su Apri.
Utilizzare lo strumento SSH per controllare il Raspberry Pi da remoto su un altro PC con sistema operativo. Eseguire il Codice di Esempio con il seguente comando:
wget https://osoyoo.com/driver/mecanum/mecanum_oa5.py
python mecanum_oa5.py
Allineamento Iniziale del Servo del Sensore Ultrasonico
Il servo compirà alcuni movimenti e infine si fermerà in direzione frontale per 3 secondi.
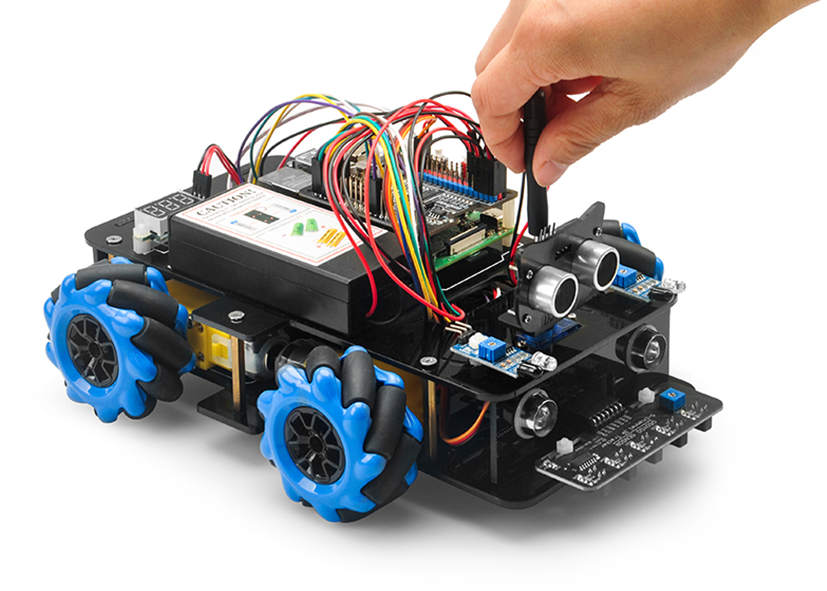
Se il sensore ultrasonico non è rivolto in avanti durante questi primi 3 secondi, spegnere immediatamente la batteria e rimuovere il sensore dal servo. Reinstallarlo orientandolo diritto in avanti come nella seguente immagine. Altrimenti, il programma di evitamento ostacoli non funzionerà correttamente.
Dopo aver regolato la direzione del sensore, riaccendere la batteria. Il sensore dovrebbe essere rivolto in avanti come nell’immagine seguente. Se la direzione non è diritto in avanti, spegnere la batteria e ripetere l’allineamento.
Test Finale:
Dopo aver acceso l’interruttore della batteria, se il modulo ultrasonico ruota in posizione frontale, significa che non è necessario regolare ulteriormente la posizione del sensore. Attendere 3 secondi. Se non viene rilevato alcun ostacolo, l’auto avanzerà. Se vengono rilevati ostacoli, l’auto si fermerà e il modulo ultrasonico ruoterà da destra a sinistra per rilevare gli ostacoli circostanti. Il robot deciderà di svoltare a sinistra, a destra o retrocedere in base ai dati del sensore e al nostro algoritmo di evitamento ostacoli.
A volte, una collisione potrebbe spostare la posizione del sensore ultrasonico. In tal caso, è necessario ripetere l’allineamento della direzione come descritto nella sezione “Allineamento Iniziale del Servo del Sensore Ultrasonico”.

Per eseguire il codice di esempio da remoto tramite SSH, utilizzare il comando::
python mecanum_oa5.py








