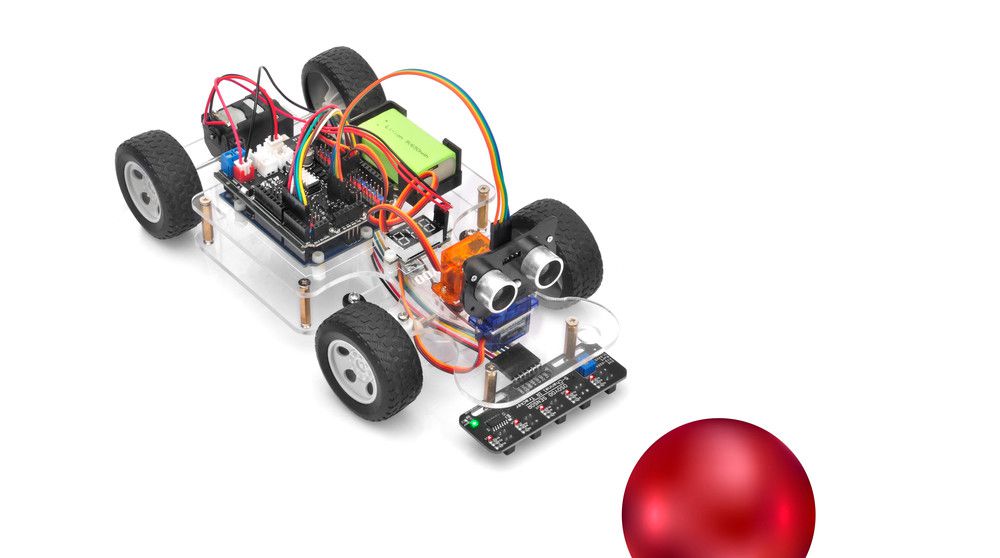
En este tutorial, usaremos el módulo ultrasónico para “ver” obstáculos y medir la distancia. Si la distancia es menor que el valor de umbral predefinido, el Robot deportivo dará la vuelta al obstáculo automáticamente.
Si no completó el trabajo del Robot, revise la Lección 1
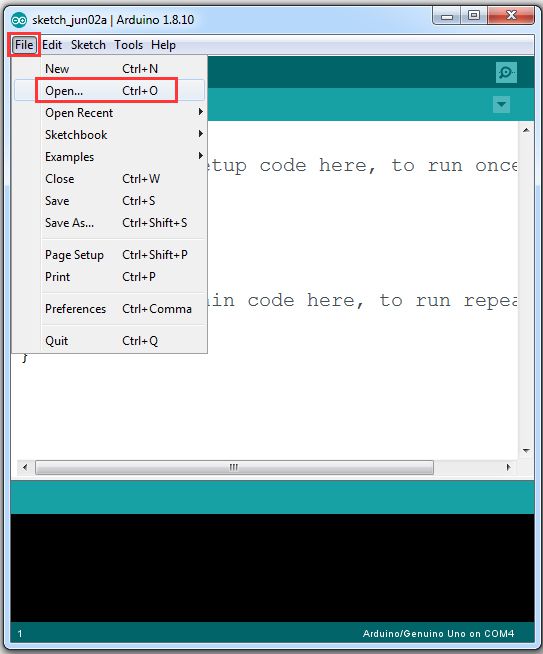
Paso 1: instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.8.19, omita este paso). Descargue Arduino el IDE desde https://www.arduino.cc/en/software, luego instale el software. Paso 2: descargue el código de muestra de la lección 4 , descomprima el archivo zip de descarga sg90car-lesson4.zip, luego verá una carpeta llamada sg90car-lesson4. Paso 3: conecte la placa UNO R3 a la PC con un cable USB, abra el IDE Arduino -> haga clic en Archivo -> haga clic en Abrir -> elija el código “sg90car-lesson4.ino” en la carpeta sg90car-lesson4 y luego cargue el código en la placa básica OSOYOO para Arduino. Aviso: apague la batería o desconecte el adaptador de corriente cuando cargue el código en la placa básica OSOYOO para Arduino.
Paso 4: cambie el valor predeterminado 90 en la línea 19 como el valor FRONT en la Lección 1. Si alinea la dirección de la rueda manualmente como la opción 1 en el Paso 5 de la Lección 1 , omita este paso.
#define FRONT 90 //grado cuando la dirección mira hacia adelante
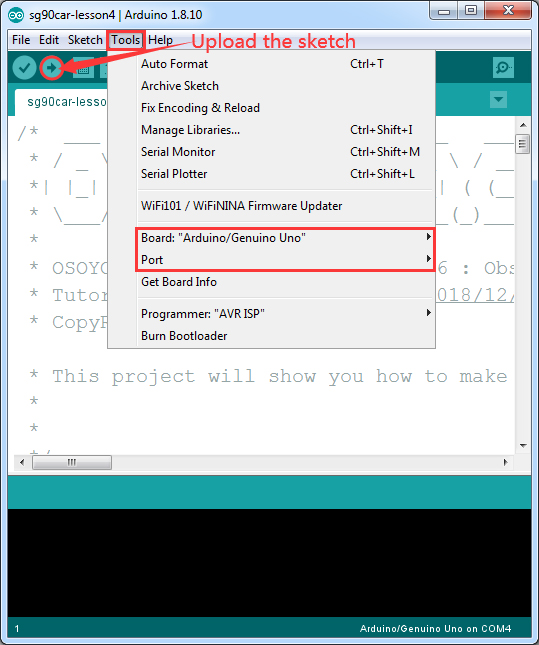
Paso 5: elija la placa/puerto correspondiente para su proyecto, cargue el código en la placa.
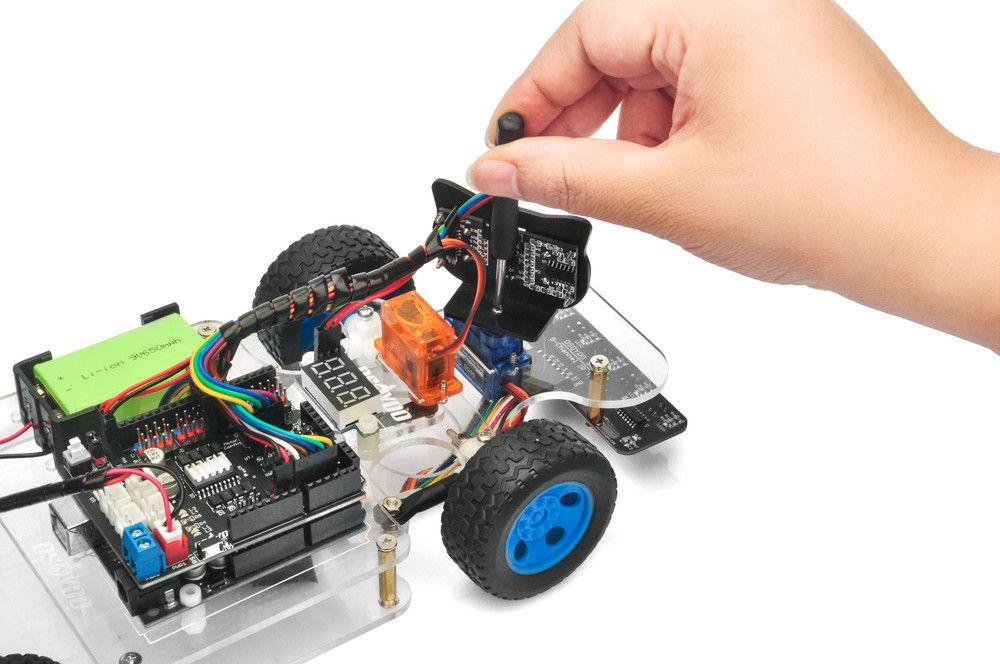
Paso 6: Alineación de la dirección inicial del servo del sensor ultrasónico
Después de encender el Robot, el sensor ultrasónico se moverá y finalmente se detendrá en una dirección durante 2 segundos. Durante estos primeros 2 segundos, debe asegurarse de que el sensor ultrasónico (dos ojos) esté orientado hacia adelante. Si no es sencillo, debe apagar el Robot de inmediato y quitar el sensor del servo, volver a instalarlo y hacer que mire hacia adelante como se muestra en la siguiente imagen. De lo contrario, el programa para evitar obstáculos no funcionará correctamente.
Pruebas finales
1. Desconecte la placa básica OSOYOO para Arduino de la PC y confirme que el interruptor de encendido del escudo OSOYOO Motor V1.1 esté apagado, luego coloque una batería de 9V en la caja de la batería. (Nota: asegúrese de que la dirección de la batería sea la correcta, de lo contrario, puede destruir su dispositivo y provocar un riesgo de incendio) .
2. Coloque el automóvil en el suelo y encienda el interruptor de OSOYOO Motor Shield V1.1. Si no se detecta ningún obstáculo, el coche avanzará. Si se detecta algún obstáculo, el automóvil se detendrá, el módulo ultrasónico girará de derecha a izquierda para detectar el obstáculo circundante. El automóvil robot decidirá girar a la izquierda, a la derecha o hacia atrás de acuerdo con los datos del sensor de obstáculos y nuestro algoritmo para evitar obstáculos.
A veces, su automóvil puede tener una colisión y hacer que la posición de su sensor ultrasónico cambie, debe recordar hacer la alineación de la dirección del sensor nuevamente según el enlace Paso 6 . Nota: Si el Robot no se mueve según el resultado mencionado anteriormente, debe verificar la conexión del cable del sensor de seguimiento y el voltaje de la batería (debe ser superior a 7,2 V).
4. Si desea cambiar el giro de la derecha o la izquierda, edite la línea 20 a 23 del código y vuelva a cargar el código: (Nota: el giro no se puede configurar en más de 35)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Si desea cambiar la velocidad del Robot, revise el siguiente código ( Nota: el valor máximo es 255 )
I have a problem with my ultrasonic sensor not facing straight forward like it used to. I tried to reinstall it and it did not work… I need help with this. I need a solution. I tried changing codes, and redoing the code all over again but did not work. I’m new to this so any answer to my problem is greatly appreciated. Thank you.












I have a problem with my ultrasonic sensor not facing straight forward like it used to. I tried to reinstall it and it did not work… I need help with this. I need a solution. I tried changing codes, and redoing the code all over again but did not work. I’m new to this so any answer to my problem is greatly appreciated. Thank you.
-TheNewBeggining