Dans cette leçon, vous devez compléter la leçon 4 avant de continuer avec cette leçon. Nous utilisons le module ultrasonique pour “voir” les obstacles et mesurer la distance. Si la distance est inférieure à une valeur seuil prédéfinie, le buzzer émettra un bip et la voiture se retournera automatiquement depuis l’obstacle.
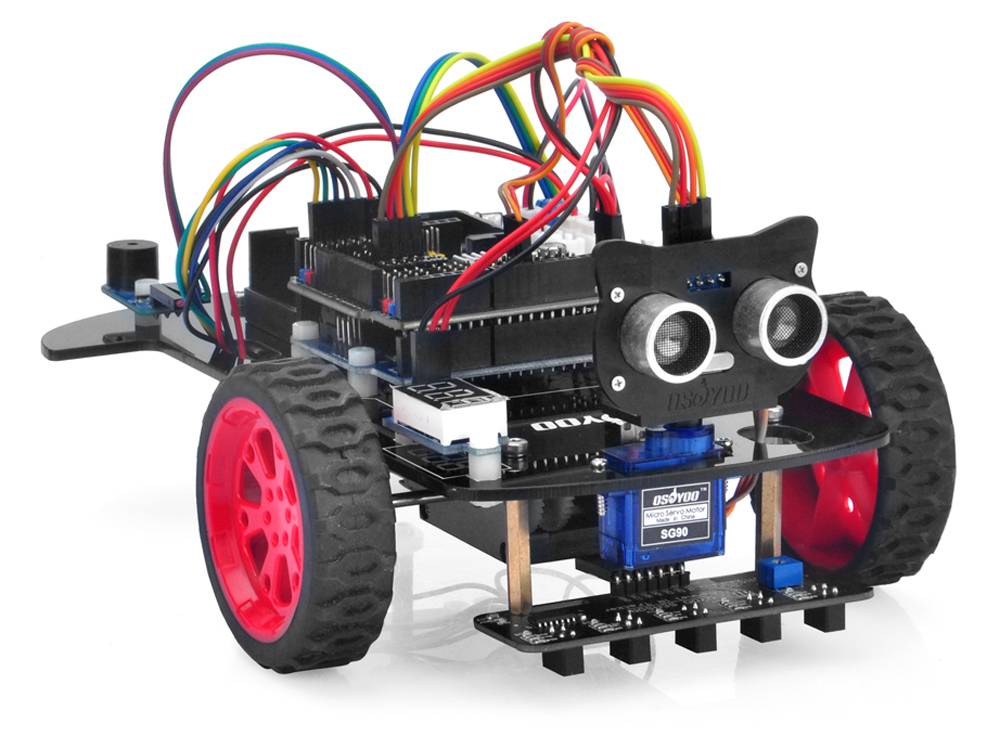
Installation Matérielle
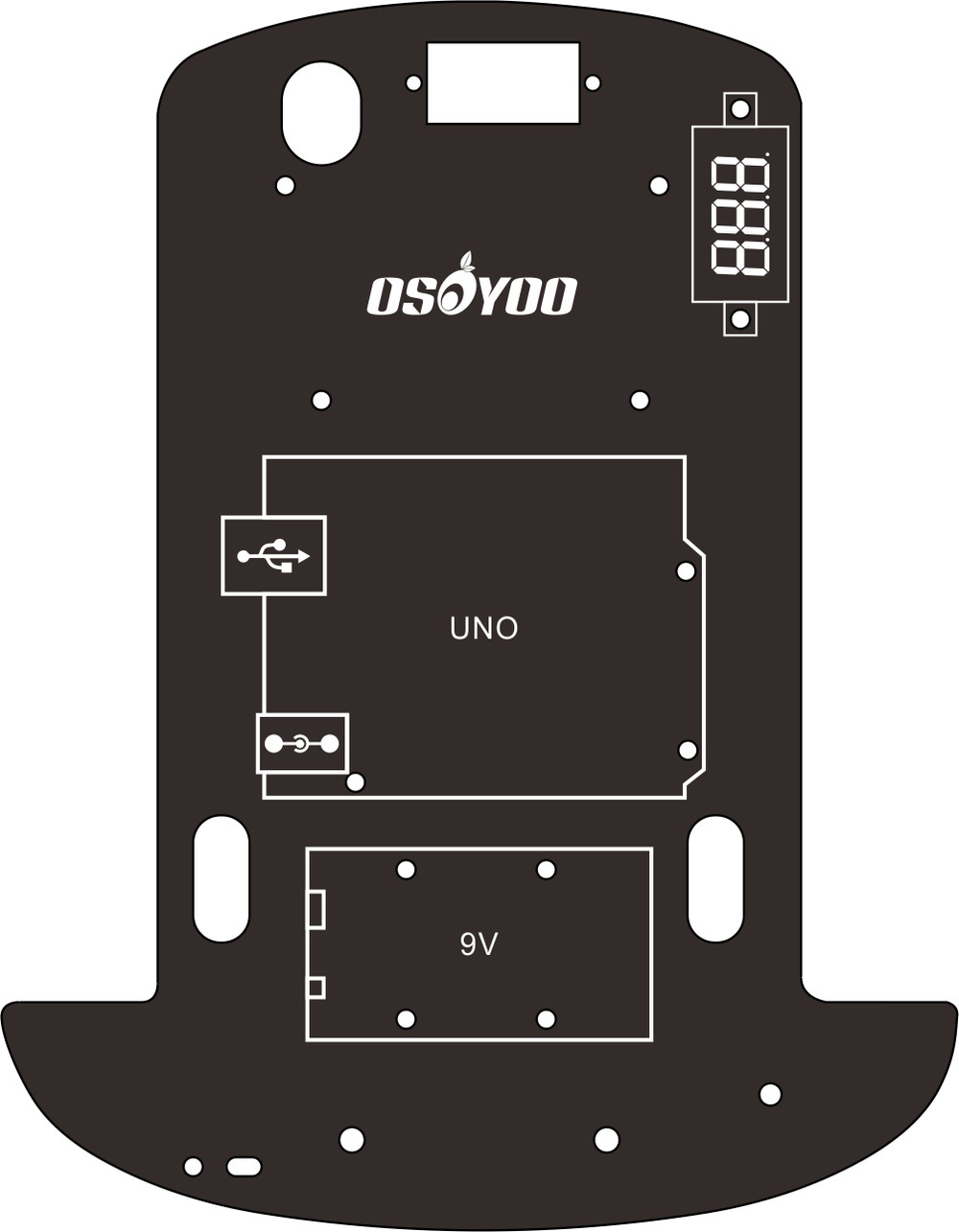
Installez le cadre de base de la voiture intelligente tel que décrit dans la leçon 4. Si vous avez déjà effectué l’installation dans la leçon 4, laissez-la telle quelle.
Connectez la carte de base OSOYOO pour Arduino à votre PC à l’aide d’un câble USB, ouvrez l’IDE -> cliquez sur Fichier -> cliquez sur Ouvrir -> choisissez le code “lesson5.ino” dans le dossier lesson5, chargez le code dans la carte.
Remarque : éteignez votre batterie ou débranchez votre adaptateur d’alimentation lorsque vous téléchargez le code de croquis sur la carte OSOYOO Basic Board for Arduino.
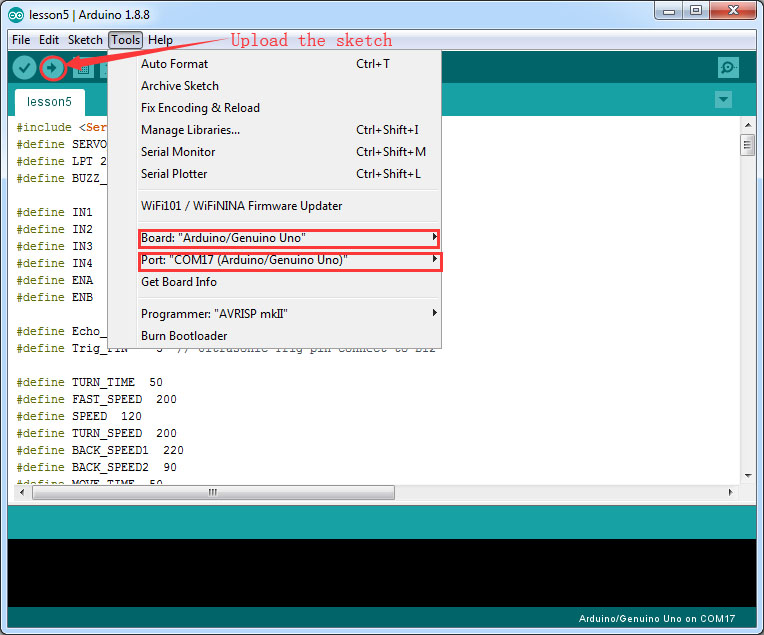
Étape 4:
Choisissez la carte et le port correspondants à votre projet, téléversez le croquis sur la carte.
Étape 5:
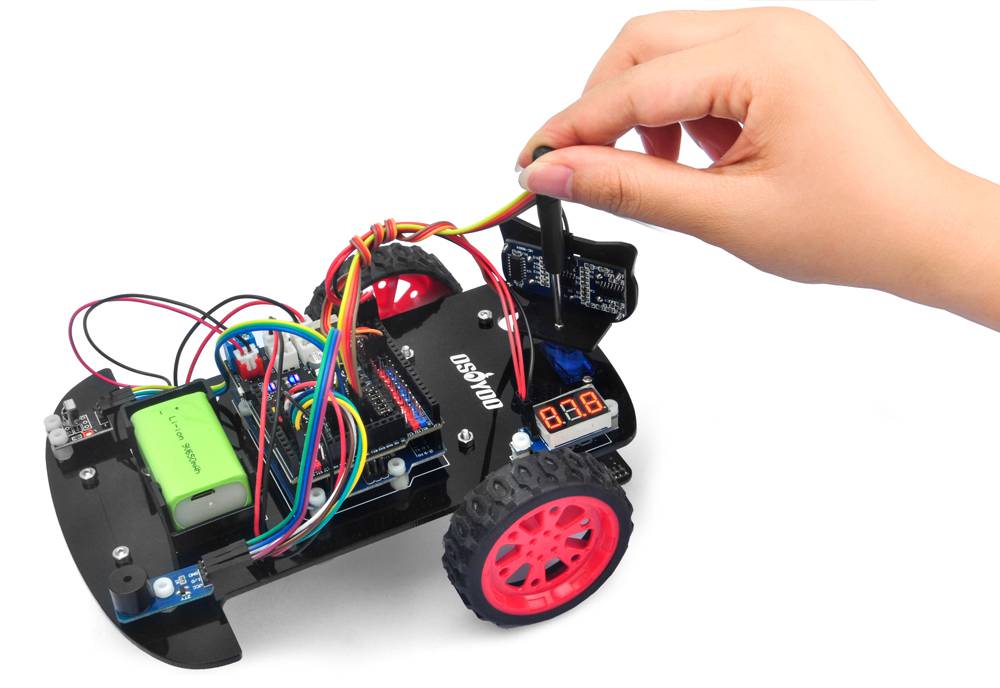
Alignement de la direction initiale du capteur ultrasonique
Après avoir allumé la voiture, vous entendrez un long bip, puis le servo effectuera un mouvement et finalement s’arrêtera dans une direction pendant 5 secondes.
Pendant ces cinq premières secondes, vous devez vous assurer que le capteur ultrasonique (deux yeux) est orienté droit devant.
Si ce n’est pas droit devant, vous devez immédiatement éteindre la voiture et retirer le capteur du servo, le réinstaller et le faire face à la direction droite comme indiqué sur l’image ci-dessous. Sinon, le programme d’évitement d’obstacles ne fonctionnera pas correctement.
Après avoir ajusté la direction du capteur, rallumez la voiture. Après avoir entendu le long bip, le capteur doit faire face à l’avant, comme sur l’image ci-dessous. Si sa direction n’est pas droite devant, éteignez la voiture et réalisez à nouveau l’alignement de la direction.
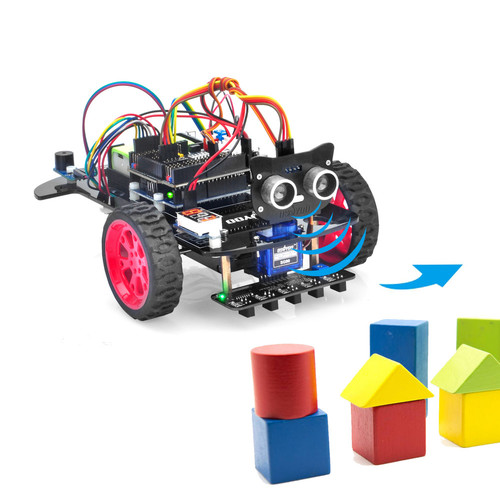
Test:
Allumez la voiture, si le module ultrasonique se tourne vers la position de vue avant, cela signifie que vous n’avez plus besoin d’ajuster la position du capteur. Attendez simplement 5 secondes. Si aucun obstacle n’est détecté, la voiture avancera. Si un obstacle est détecté, la voiture s’arrêtera, le module ultrasonique se tournera de droite à gauche pour détecter les obstacles environnants. La voiture robot décidera de tourner à gauche, à droite ou en arrière en fonction des données de détection d’obstacles et de notre algorithme d’évitement d’obstacles.
Parfois, votre voiture peut entrer en collision et modifier la position de votre capteur ultrasonique. Vous devez alors vous rappeler de réaliser à nouveau l’alignement de la direction du capteur, comme indiqué dans le lien Alignement de la direction initiale du capteur ultrasonique.
Pièces et dispositifs:
N°
Dispositif
Image
Qté
Accessories
1
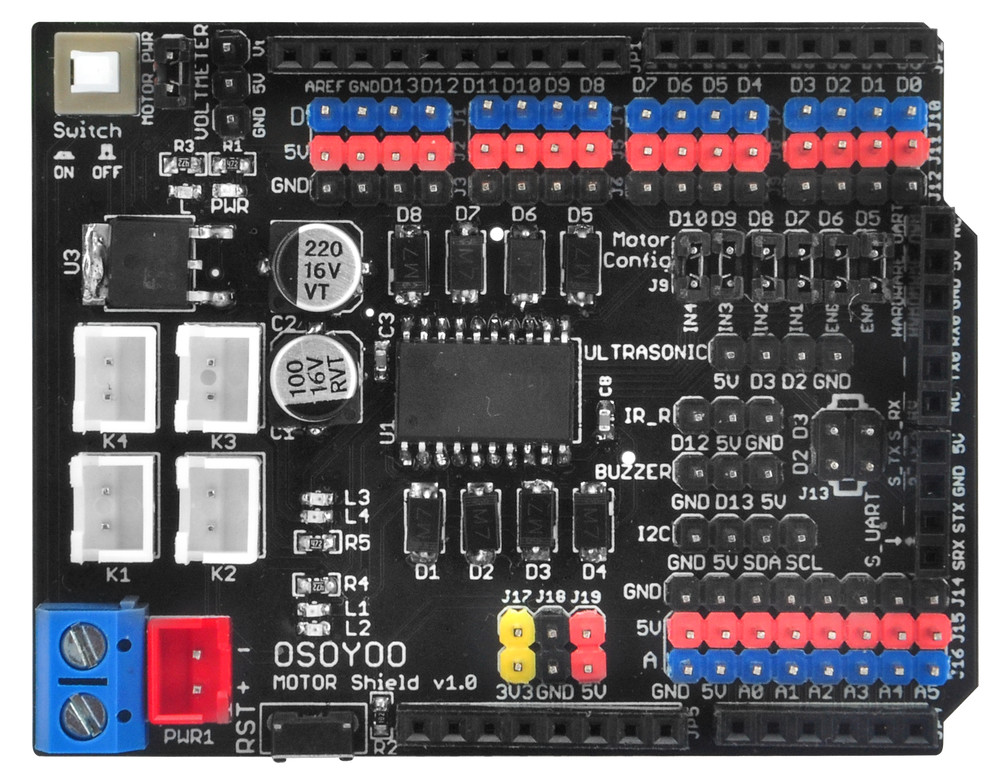
Carte de base OSOYOO (entièrement compatible avec Arduino UNO R3)
Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
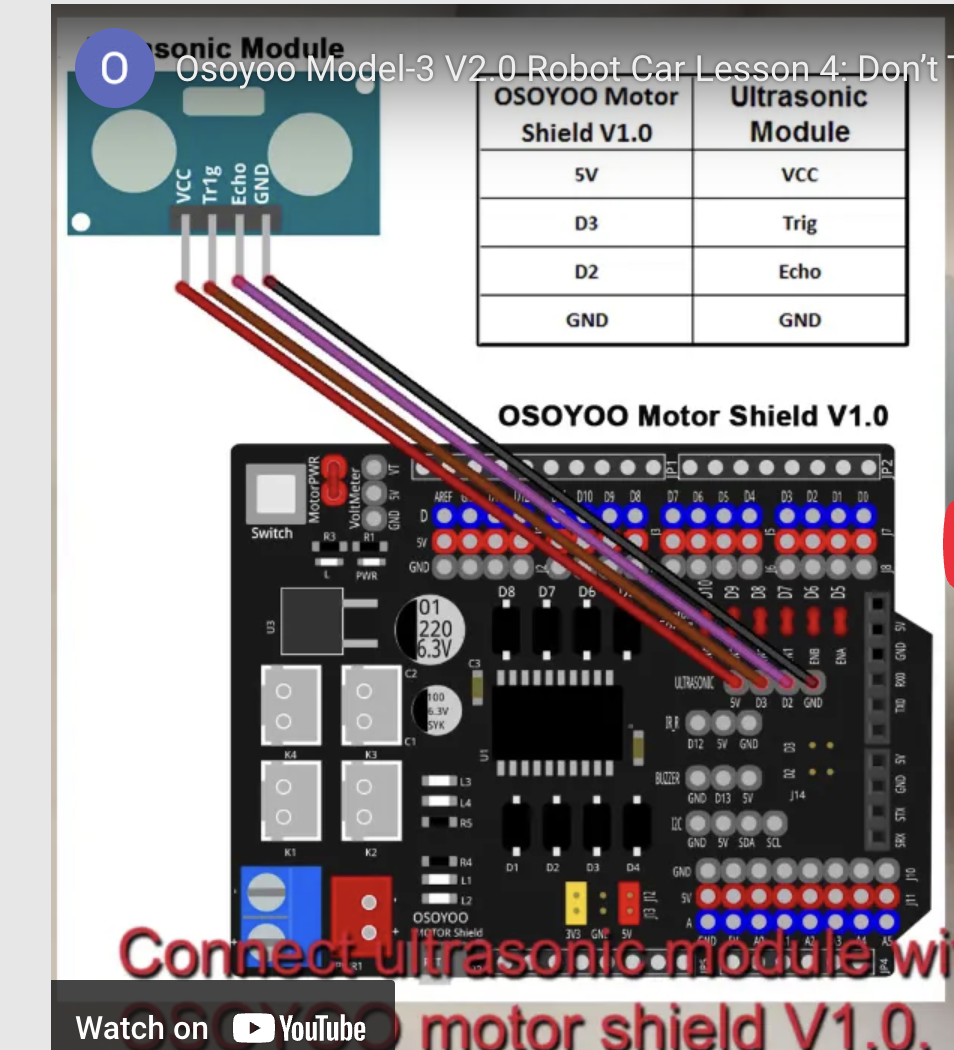
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.





























Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
bonjour je ne comprend pas la voiture tourne sa tête mais au lieu d’avancer, elle recule de plus elle ne répond plus a la télécomande Merci
If you meet this problem in the lesson Obstacle avoidance, please check the wires on Ultrosonic Sensor or change another Ultrosonic Sensor
Hi, when i did this lesson the car kept on moving back without doing anything and the car when i plug it in my computer it trys to move back
Hi, the robot is just seeing obstacles everywhere? So it scans around, then turns 90 degrees eternally – what’s wrong here?
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
Don’t you guys have a mblock graphic programming for this one like the one for the Model T. Would be very didactic for the little kids.
Thanks
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.