Vous pouvez télécharger le manuel de l’utilisateur à partir de :

Dans ce tutoriel, nous utiliserons deux capteurs de suivi OSOYOO pour guider la voiture afin qu’elle se déplace automatiquement le long de la ligne de piste noire sur le sol blanc. Le logiciel de cette leçon lira les données des capteurs de suivi et guidera automatiquement la voiture pour qu’elle se déplace le long de la ligne noire sur le sol blanc.
Un robot suiveur de ligne, comme son nom l’indique, est un véhicule autopiloté qui suit une ligne noire imprimée sur un sol blanc. Les capteurs de suivi du robot vérifient en permanence si la position actuelle de la voiture est en dehors de la ligne. Si c’est le cas, la voiture effectue un mouvement négatif pour ramener la voiture du robot sur la piste.
Si vous n’arrivez pas à compléter le cadre de la voiture, veuillez revoir les points suivants leçon 1


Si vous n’avez pas terminé la connexion des fils de base, veuillez revoir la leçon 2
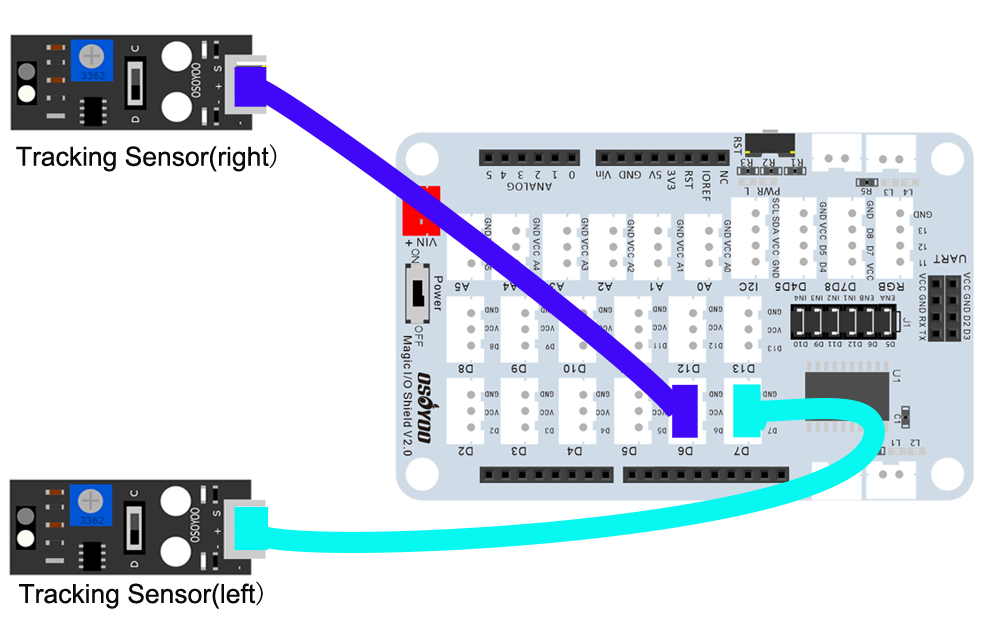
Connexion :
Capteur de suivi gauche à D7
Capteur de suivi droit à D6

ETAPE 1:
Téléchargez https://osoyoo.com/driver/2022008400/lesson3.zip , décompressez-le, vous verrez un dossier appelé lesson3
ETAPE 2:
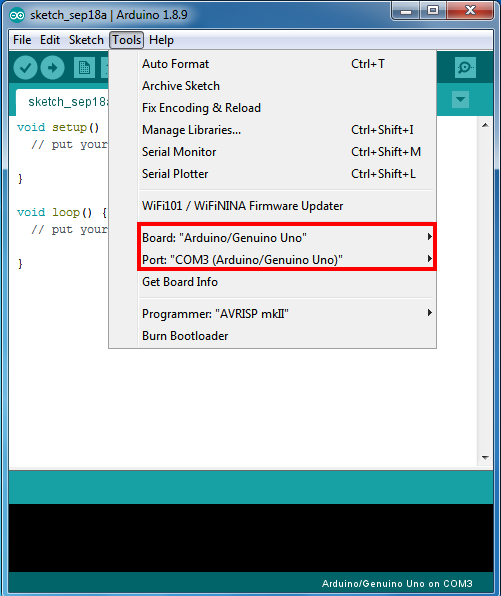
Connectez la carte UNO R3 au PC avec un câble USB, ouvrez l’IDE, choisissez la carte/le port correspondant à votre projet.
Remarque : éteignez la batterie ou débranchez la prise : Eteignez votre batterie ou débranchez votre adaptateur d’alimentation lorsque vous téléchargez le code de l’esquisse sur la carte OSOYOO Basic Board pour Arduino.
ETAPE 3:
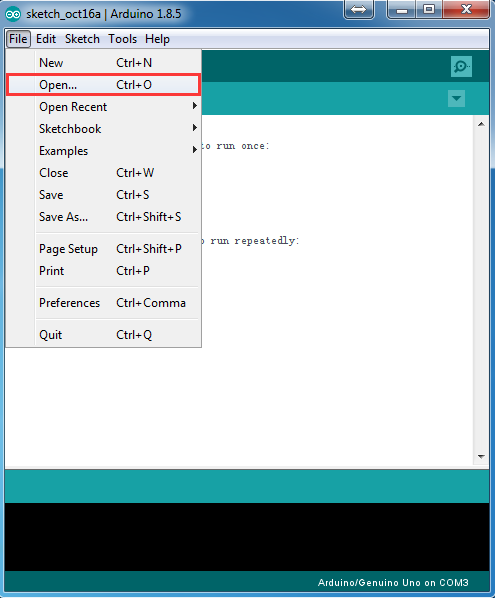
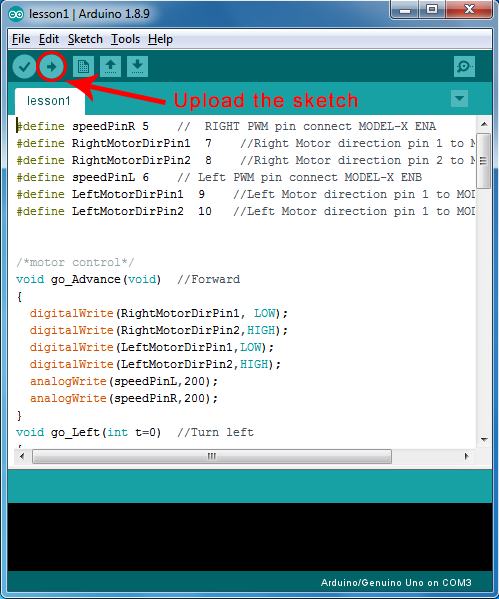
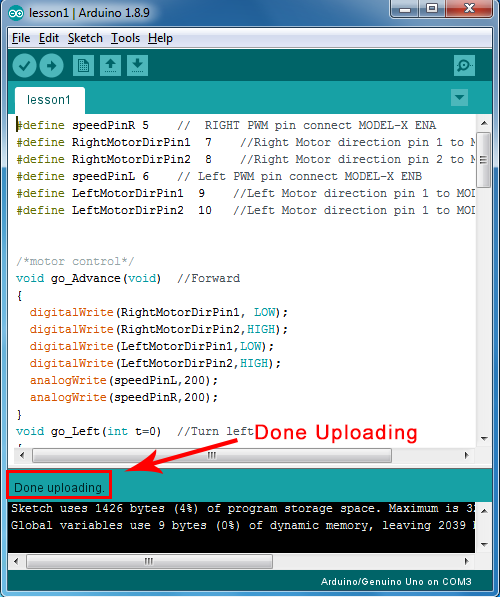
Cliquez sur file -> cliquez sur Open -> choisissez le code “lesson3.ino”, chargez le code dans OSOYOO Basic Board for Arduino, puis téléchargez le sketch sur la carte.
Remarque : Alignement du servo
Veuillez changer la valeur par défaut 90 dans la ligne suivante pour la valeur FRONT dans l’option 2 de l’étape 5 de la leçon 2. Si vous alignez la direction des roues manuellement comme dans l’option 1 de l’étape 5 de la leçon 2, veuillez sauter cette étape.
#define FRONT 90 // steering to front
ETAPE 4:
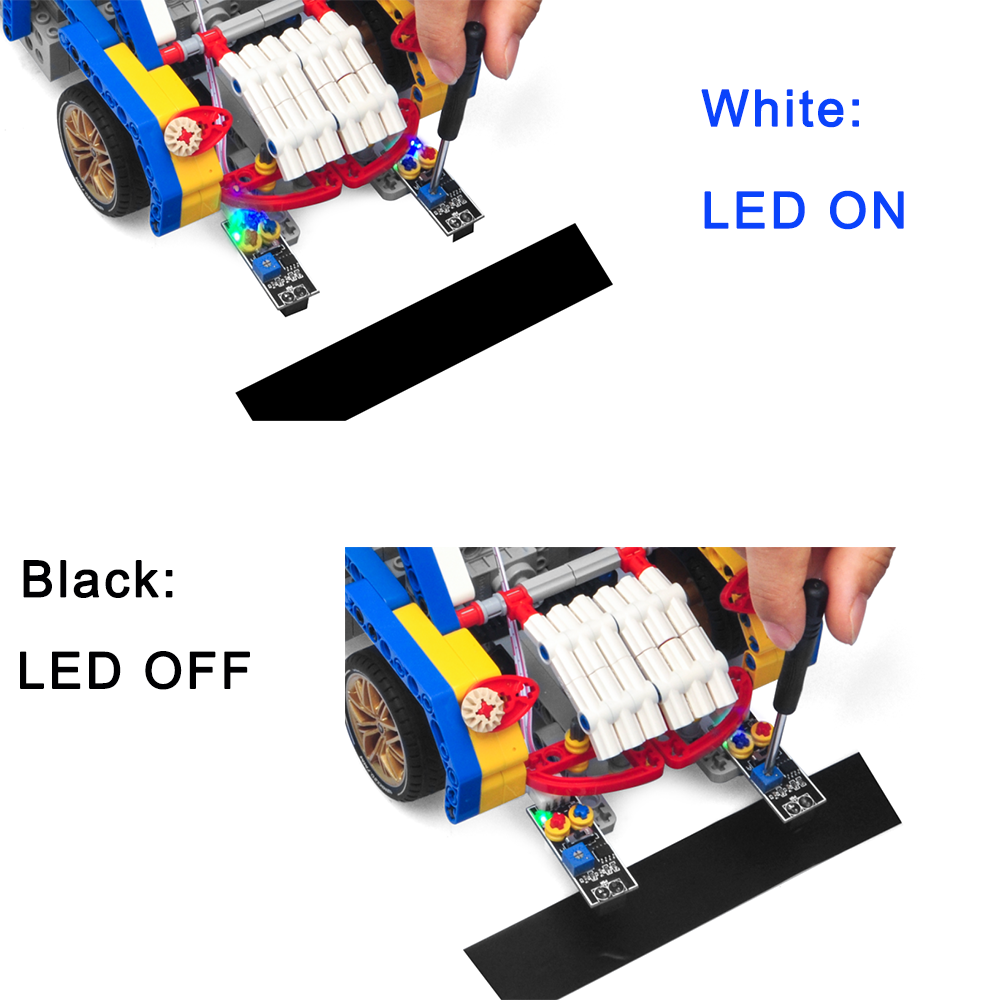
Ajustez la sensibilité des modules de capteurs de suivi.
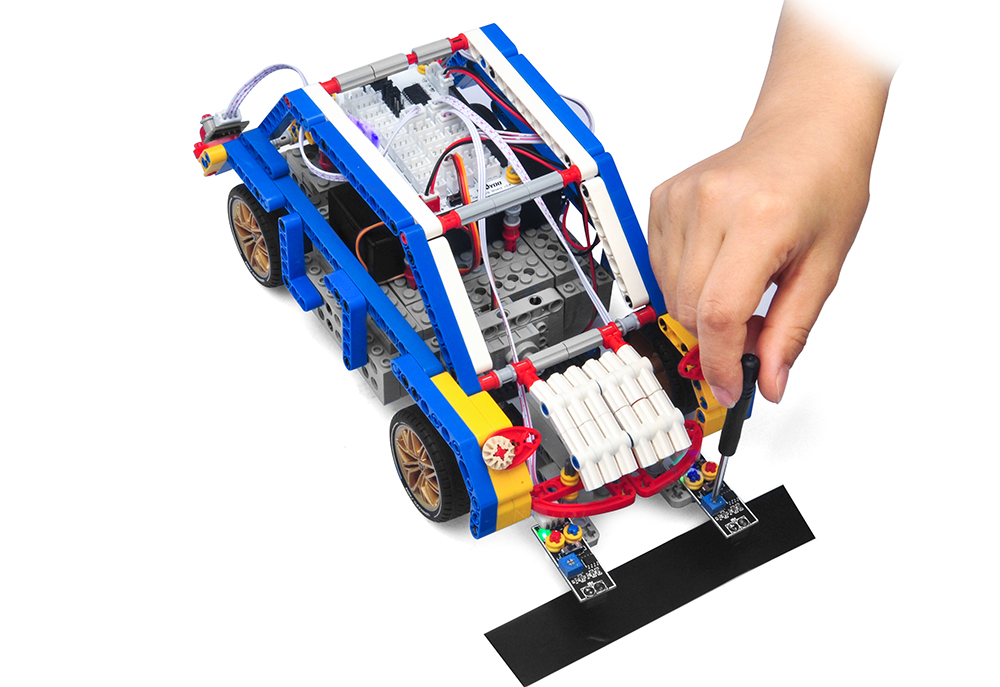
Allumez et maintenez la voiture et ajustez le potentiomètre du capteur de suivi à l’aide d’un tournevis en croix jusqu’à ce que vous obteniez le meilleur état de sensibilité : la LED indiquant le signal s’éteint lorsque le capteur est au-dessus du sol blanc, et la LED indiquant le signal s’allume lorsque le capteur est au-dessus d’une piste noire.

1. préparez une piste noire (la largeur de la piste noire est supérieure à 20 mm et inférieure à 30 mm) dans un sol blanc. Veuillez noter que l’angle de courbure du rail ne peut être supérieur à 30 degrés. Si l’angle est trop grand, la voiture sortira de la piste.
2. Placez la voiture sur la piste, allumez l’interrupteur du bouclier moteur OSOYOO et l’interrupteur de la boîte à piles, la voiture se déplacera le long de la piste noire.
Note : Si la voiture ne se déplace pas comme indiqué ci-dessus, vous devez vérifier la connexion des fils du capteur de suivi, la tension de la batterie (qui doit être supérieure à 7.2v).
3. Si vous voulez changer l’ange de droite ou de gauche, veuillez éditer la ligne suivante du code et télécharger à nouveau le sketch :
int RIGHT=FRONT-70;
int LEFT=FRONT+70;
4. Si vous voulez changer la vitesse de la voiture, veuillez réviser le code suivant de l’esquisse (Note: la valeur maximale est 255)
#define SPEED 190
#define HI_SPEED 220