
Aperçu
Le Shield Moteur OSOYOO est basé sur le L293DD (datasheet), qui est un driver à quatre canaux haute tension et haute intensité intégré monolithique conçu pour accepter des niveaux logiques DTL ou TTL standard et piloter des charges inductives (telles que des relais, des solénoïdes, des moteurs DC et pas à pas) et des transistors de puissance de commutation. Pour éviter les dommages à la carte, toutes les lignes du driver sont protégées par une diode contre les EMF de retour. La tension d’alimentation maximale prise en charge par cette carte est de 20V.
Il utilise une puce L293DD qui délivre un courant de sortie jusqu’à 1,2 A par canal. Il nécessite une alimentation électrique de 6V à 15V pour alimenter le moteur et comprend également un régulateur de tension 5V intégré pour alimenter la puce de commande. Il vous permet de piloter deux moteurs DC avec votre carte Arduino, en contrôlant la vitesse et la direction de chacun de manière indépendante.
Vous pouvez utiliser le microcontrôleur UNO R3 et ajouter des composants externes pour réaliser une variété d’expériences étonnantes, telles que la fabrication de robots intelligents. Lorsque vous fabriquez votre robot, il est nécessaire d’utiliser une carte de commande de moteur pour alimenter les moteurs à courant continu, cependant, il est parfois nécessaire de connecter la carte de commande de moteur à l’UNO en utilisant beaucoup de fils de cavalier, ce qui est assez peu pratique.
Le Shield Moteur peut être alimenté directement par l’Arduino ou par une source d’alimentation externe. Il est fortement recommandé d’utiliser une alimentation électrique externe pour alimenter le Shield Moteur.
Cette carte fournit également des indicateurs de direction LED pour les deux canaux, ce qui est très utile lors de la phase de configuration pour vérifier le comportement du firmware; les indicateurs LED fonctionnent également sans appliquer de moteur réel à la sortie.
Fonctionnalités
- Pin out standard pour le Shield UNO
- Basé sur la puce pilote de moteur L293DD
- Pilote 2 moteurs DC ou 1 moteur pas à pas
- Entrée d’alimentation externe disponible
- Interrupteur d’alimentation externe
- Bouton RST
- Interfaces d’alimentation 5V/3,3V/GND
- Cavalier interrupteur d’alimentation du pilote de moteur
- Interface uart matérielle / Interface uart logicielle
- Interfaces de capteurs
- Tous les broches gpio sont disponibles
- Câblage pratique lié au moteur via des cavaliers
- 4 indicateurs de direction lumineux
- Dissipateur de chaleur pour de meilleures performances
- Fonction d’add-on Wifi IoT lorsqu’il est utilisé avec le module WIFI OSOYOO (https://osoyoo.com/2020/12/20/osoyoo-esp8266-wi-fi-module/)
- Fonction Bluetooth lorsqu’il est utilisé avec le module Bluetooth HC-02 (https://osoyoo.store/products/hc02-bluetooth-module-for-osoyoo-robot-car?variant=22561056948342)ATTENTION :
Le CI du pilote et le dissipateur de chaleur peuvent devenir très chauds lorsqu’ils sont utilisés avec un courant supérieur à 1000mA.
Spécifications
- Tension d’entrée logique VD : 5V
- Tension d’entrée (recommandée) : 7 ~ 12V
- Tension d’entrée (limite) : 6-20V
- Courant de travail de la partie logique Iss : <36mA
- Courant de fonctionnement de la partie d’entraînement Io : 1,2A
- Dissipation de puissance maximale : 25W (T=75°C)
- Niveau d’entrée de signal de contrôle : Haut 2,3V bas -0,3V
- Température de travail : -25 + 130°C
- Prise d’alimentation à vis : bornier à pas de 5,0 mm
- Clip de ceinture et peut être contrôlé via un accès de rangée avant du signal
- Type d’entraînement : Pilote de pont en H à double alimentation
- Occupation de broche : D7 ~ D10 commande directe du moteur
- Prise en charge du mode PWM / PLL pour la vitesse du moteur
- Poids : 29 g
- Dimensions : 68,5 x 53 mm
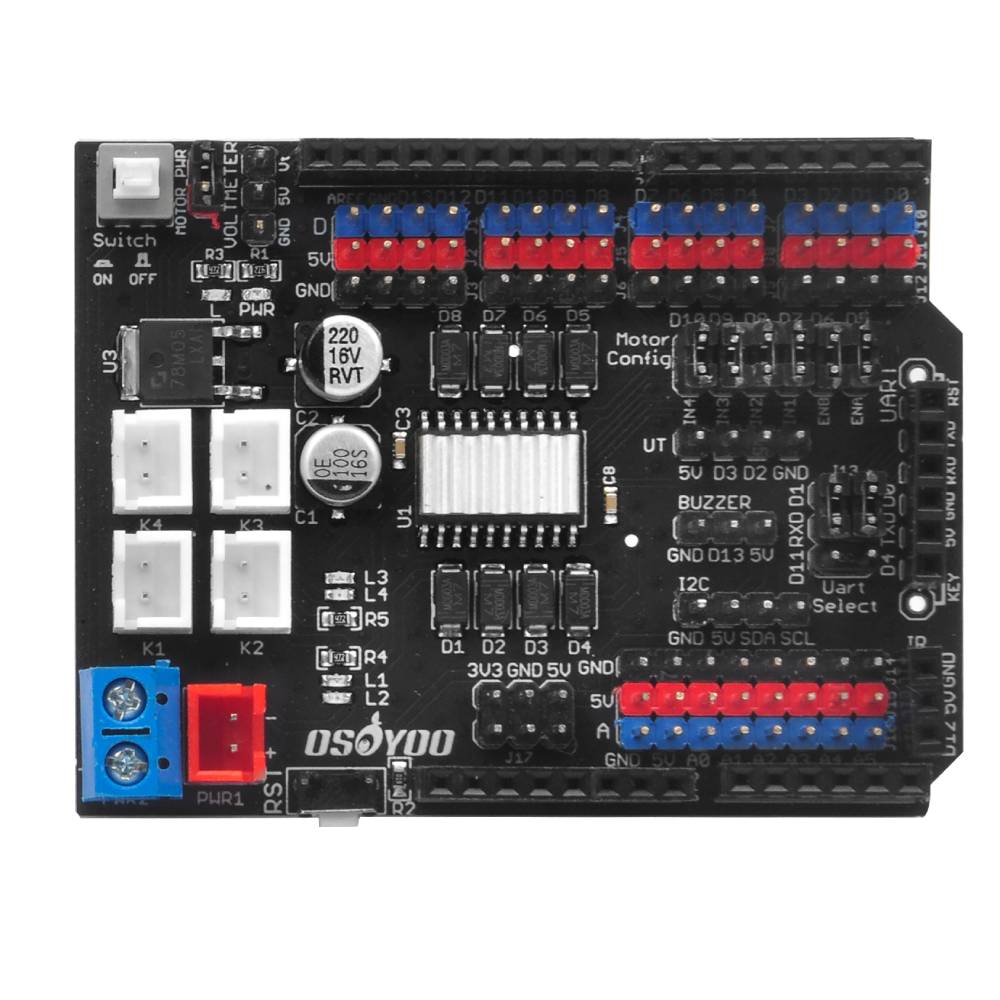
Vue d’ensemble du matériel
-
- Interrupteur d’alimentation : Contrôle l’alimentation d’entrée externe, appuyez sur l’interrupteur pour allumer l’alimentation, appuyez à nouveau pour éteindre l’alimentation
- Cavalier de puissance du moteur : Connectez le cavalier, la puce de commande du moteur fonctionne normalement, retirez le cavalier et arrêtez le fonctionnement
- Interface VOLTMETRE : Interface de voltmètre numérique à trois fils, affiche la tension d’alimentation externe
- Sortie de broche numérique : Sortie des interfaces de signal numérique
- Indicateur L : Connecté à la broche Arduino D13
- Indicateur PWR :
- Cavalier de configuration du moteur : Lorsque le cavalier est connecté, la broche de commande de la puce du moteur est connectée par défaut au port io Arduino correspondant. Si nécessaire, vous pouvez également retirer le cavalier et connecter d’autres ports io Arduino via un câble Dupont pour contrôler le moteur.
Moteur IN1-Arduino D7
Moteur IN2-Arduino D8
Moteur IN3-Arduino D9
Moteur IN4-Arduino D10
Moteur ENA-Arduino D5
Moteur ENB-Arduino D6
- Interface du moteur : K1 et K2(K3 et K4) peuvent connecter le moteur A(B) pour le moteur CC.
- Puce de commande du moteur L293DD
- Indicateurs de rotation du moteur
- Prise d’alimentation externe (prise d’alimentation bleue/prise d’alimentation XH2.54) : Alimentation externe pour le bouclier de moteur, plage 6-15V.
- Bouton de réinitialisation : Appuyez sur le bouton pour réinitialiser le bouclier et Arduino
- Sortie de broche analogique
- Interfaces de capteurs : Afin de faciliter le câblage, nous avons conçu des interfaces correspondantes pour les capteurs couramment utilisés et les avons connectées aux broches de signal d’Arduino.
- Interface IR : Vous pouvez brancher le récepteur IR sur cette interface afin que la carte puisse recevoir des signaux IR, le port de signal est connecté par défaut à D12 d’Arduino.
- Interface Uart : Connectez-vous à ces broches qui permettent la communication série sur Arduino.
- Sélecteur Uart J13 : J13 fournit un moyen pratique de configurer l’interface Uart. Vous pouvez utiliser des cavaliers pour connecter TXD et RXD du port Uart à D4 et D11, c’est-à-dire utiliser un port série souple pour communiquer avec le périphérique connecté au port Uart. Vous pouvez également le configurer comme un port série dur, il suffit de connecter les cavaliers au côté D0/D1. Le port série dur est utilisé par défaut. Si vous devez utiliser d’autres broches, vous pouvez retirer les cavaliers et utiliser des cavaliers pour connecter TXD et RXD à ces broches qui permettent la communication série sur Arduino.
- Téléchargement du fichier de pièce Fritzing :https://osoyoo.com/picture/V2.0_Model_3_Robot/Motor-shield-V1.0.fzz.zip








