Bienvenue à la première leçon d’OSOYOO Sport Car pour Arduino !
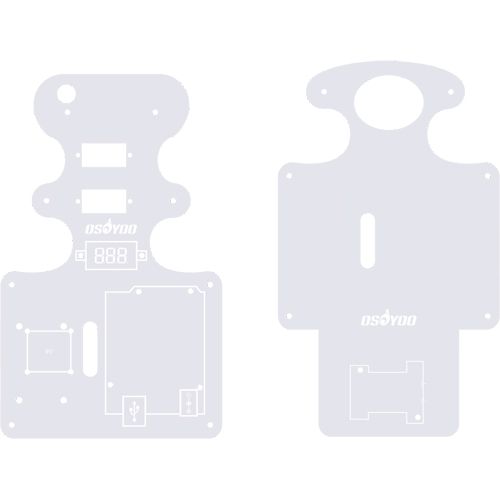
Dans cette leçon, nous allons installer le cadre de la voiture robot et aligner le servo de direction pour rendre la voiture face à l’avant
Comme vos expériences dans les leçons futures sont toutes basées sur le cadre de la leçon 1, il est très important de tester correctement l’installation et l’exemple de code de cette leçon.
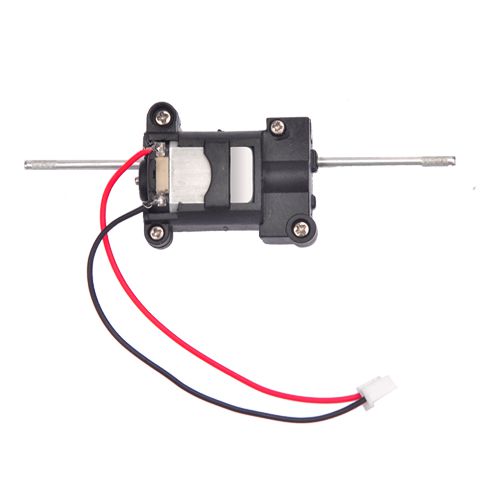
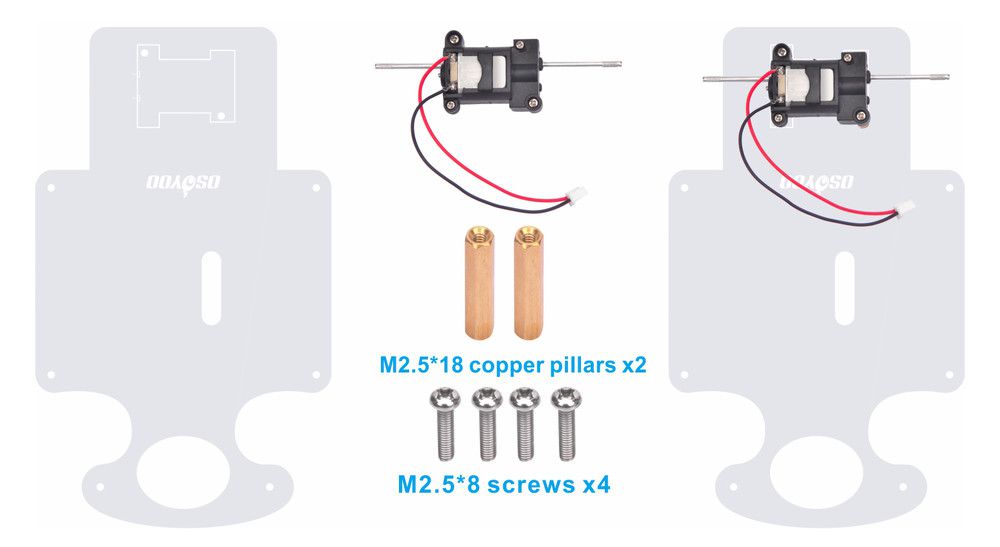
2. Fixez le moteur sur le châssis inférieur avec 2pcs M2.5 * 18 piliers en cuivre et 4pcs M2.5 * 8 vis comme suit :
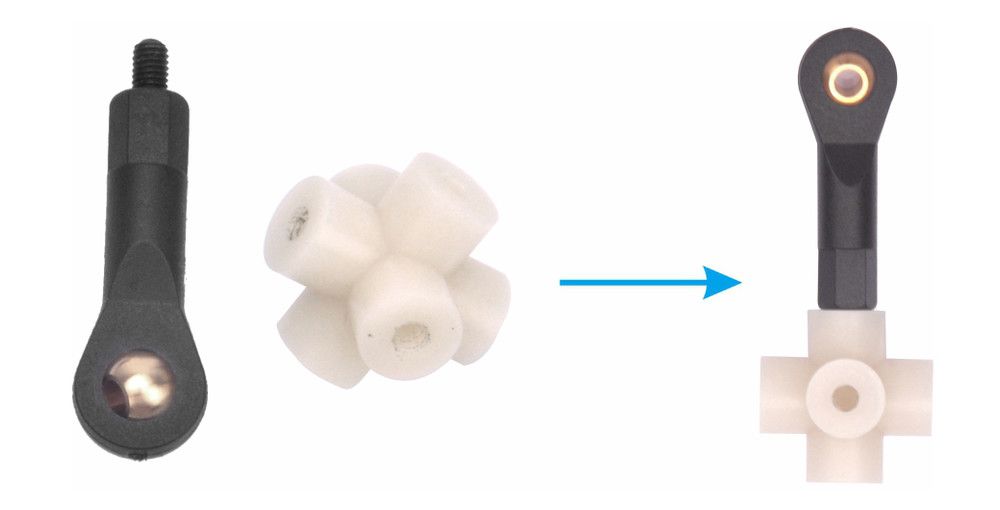
3. Connectez la ventouse avec le roulement d’extrémité de tige comme suit (Attention : Deux trous qui peuvent être croisés d’un côté à l’autre sont utilisés pour fixer la roue, veuillez ne pas installer de pièces sur ces deux trous) :
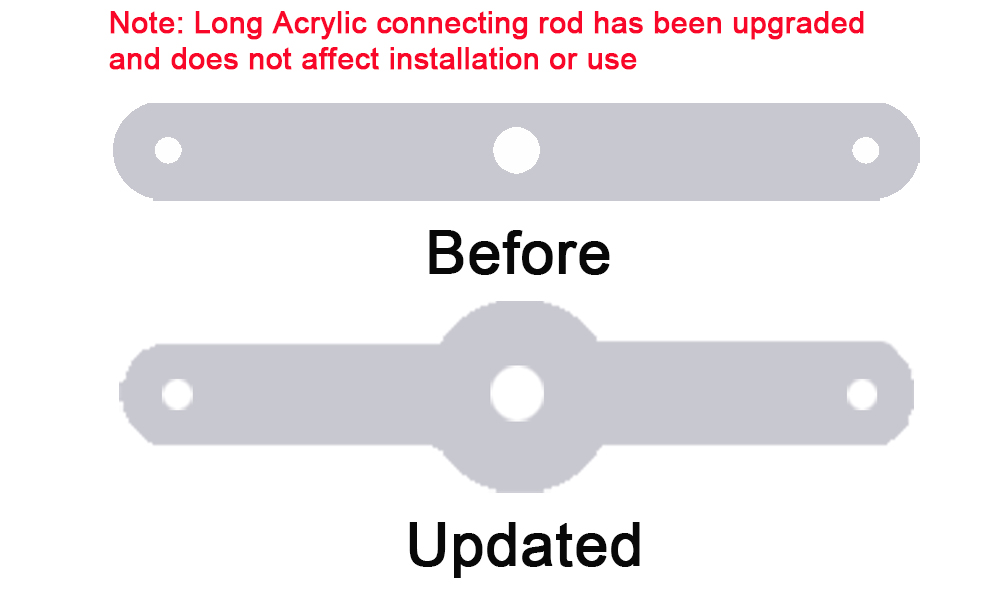
4. Installez les roulements d’extrémité de tige 2pcs sur la longue bielle en acrylique comme suit (Remarque : la bielle en acrylique long a été mise à niveau et n’affecte pas l’installation ou l’utilisation) :
5. Installez un klaxon d’asservissement noir (à partir de l’emballage du servomoteur orange) sur la courte bielle en acrylique comme suit :
6. Installez la courte bielle en acrylique sur la longue bielle en acrylique avec rivet métallique M5 * 6 comme suit :
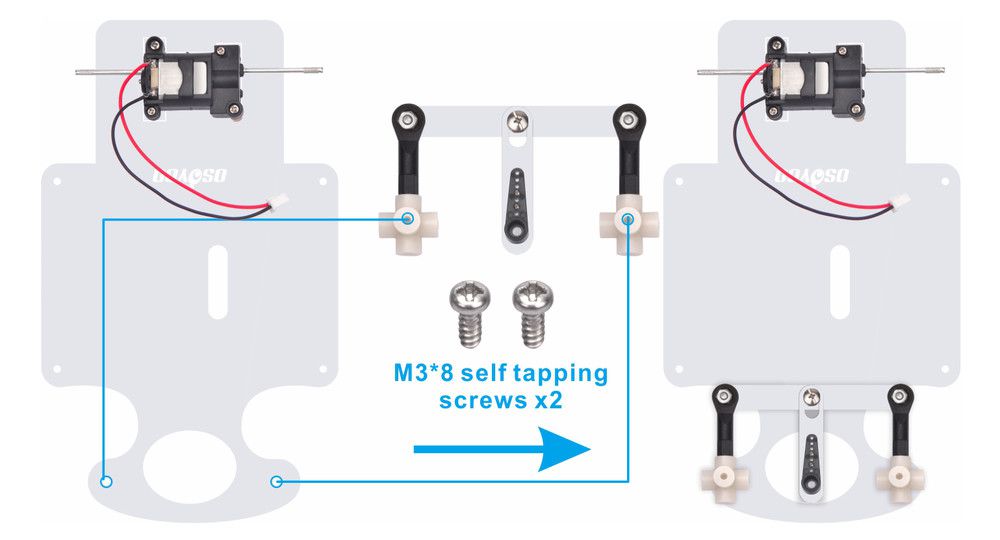
7. Fixez le bonnet de direction 2pcs sur le châssis inférieur avec 2pcs M3 * 8 auto-taraudeuses comme suit :
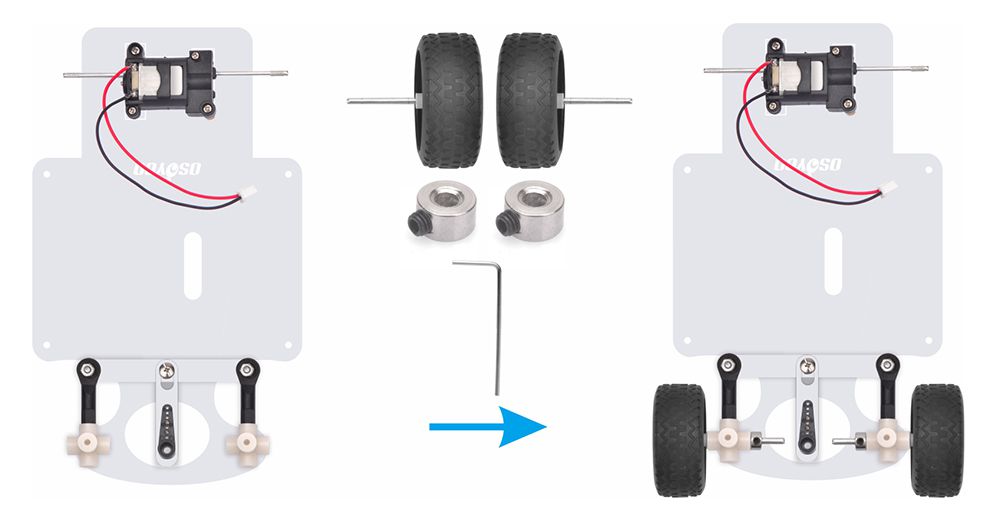
8. Installez des roues 2pcs sur la tige métallique comme suit :
9. Croisez les roues 2pcs à travers la ventouse et utilisez une clé de type L pour les fixer avec un manchon métallique comme suit :
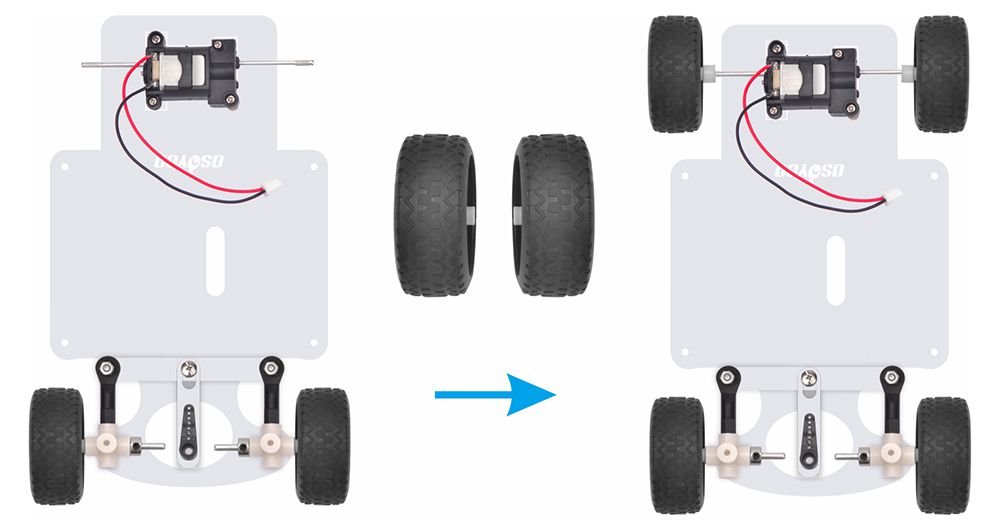
10. Installez les autres roues 2pcs sur le moteur comme suit :
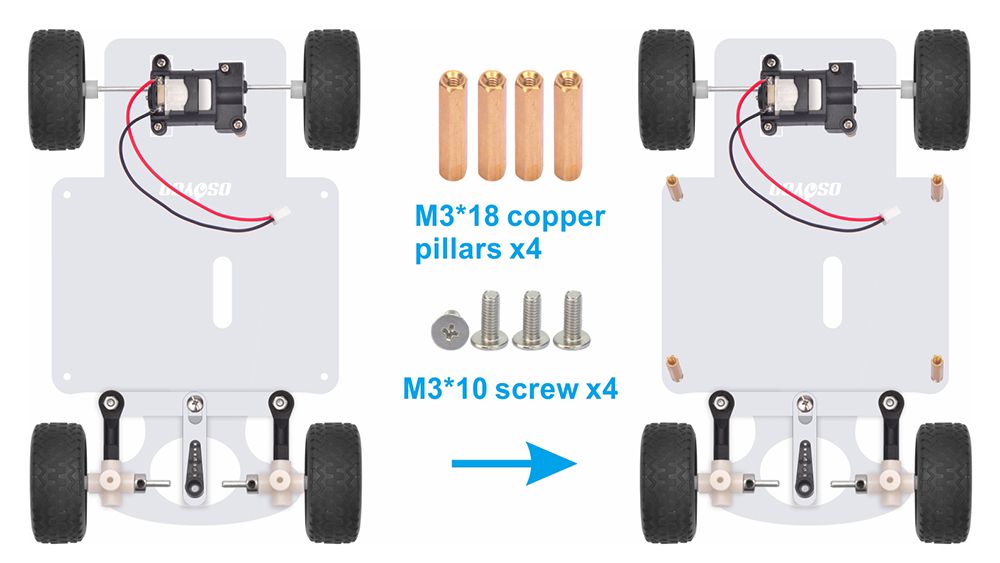
11. Installez 4pcs M3 * 18 piliers en cuivre sur le châssis inférieur de la voiture avec des vis M3 * 10 comme suit:
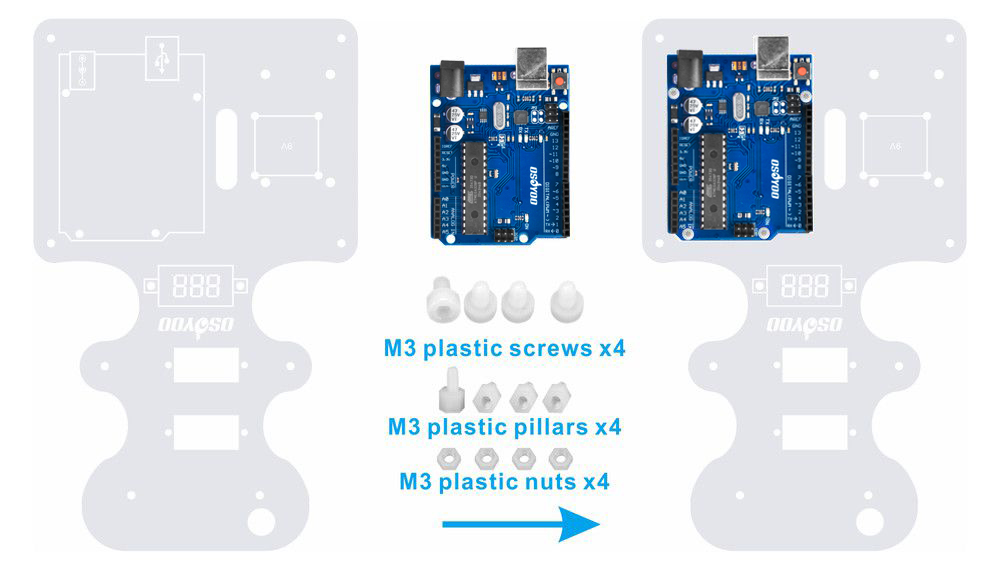
12. Utilisez un tournevis hexagonal pour installer OSOYOO UNO Board sur le châssis supérieur de la voiture avec des vis, des piliers et des écrous en plastique M3 comme suit :
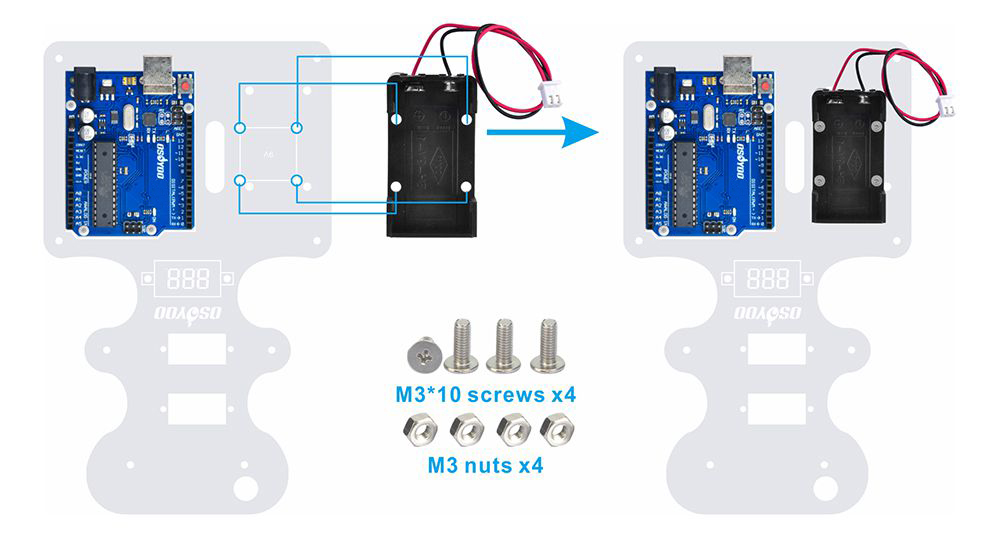
13. Installez le boîtier de batterie 9V sur le châssis avec des vis et des écrous M3 Phillips comme suit :
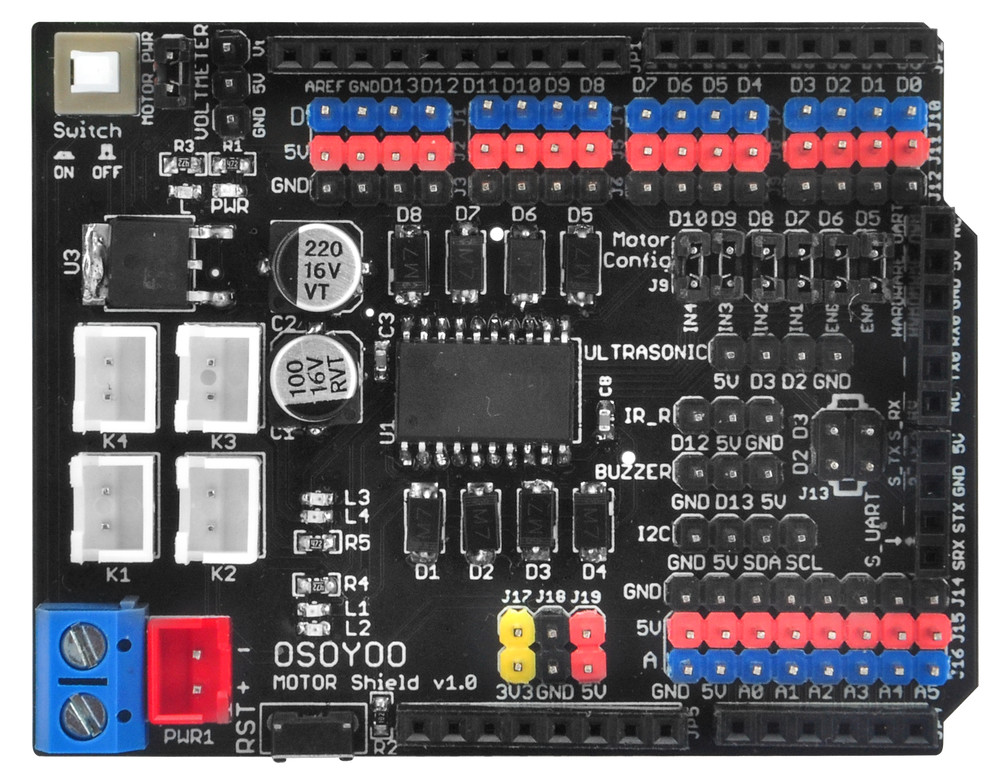
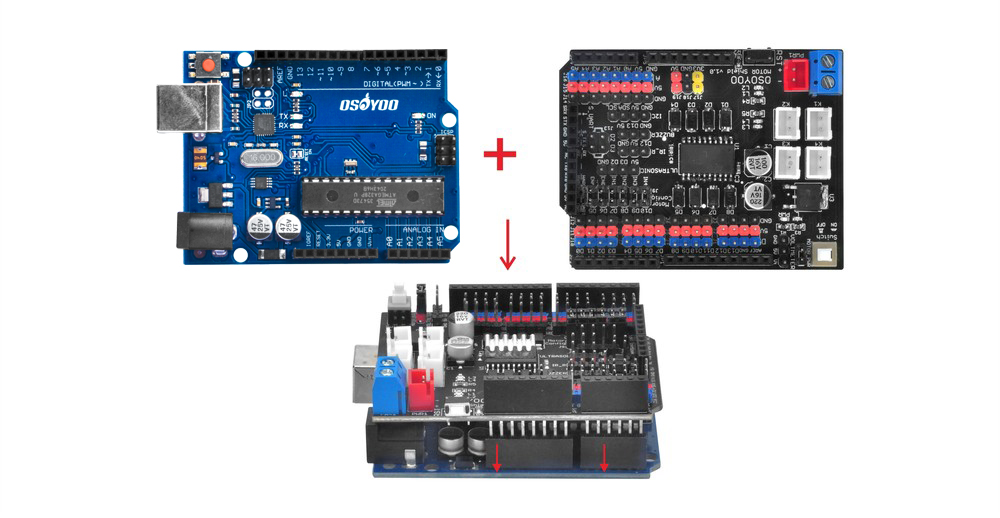
14. Branchez la carte OSOYOO Motor Shield Board dans la carte OSOYOO UNO comme suit
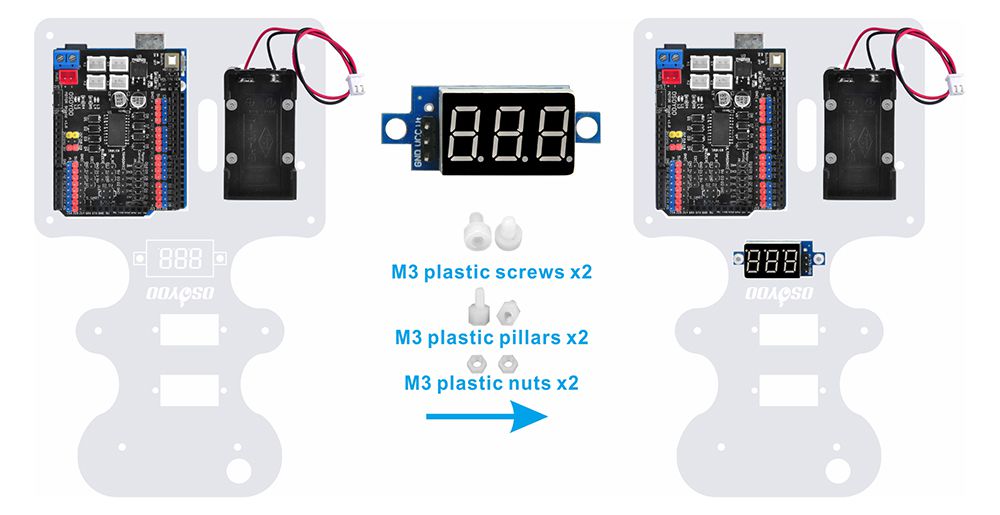
15. Installez le voltmètre sur le châssis avec des vis, des piliers et des écrous en plastique M3 comme suit :
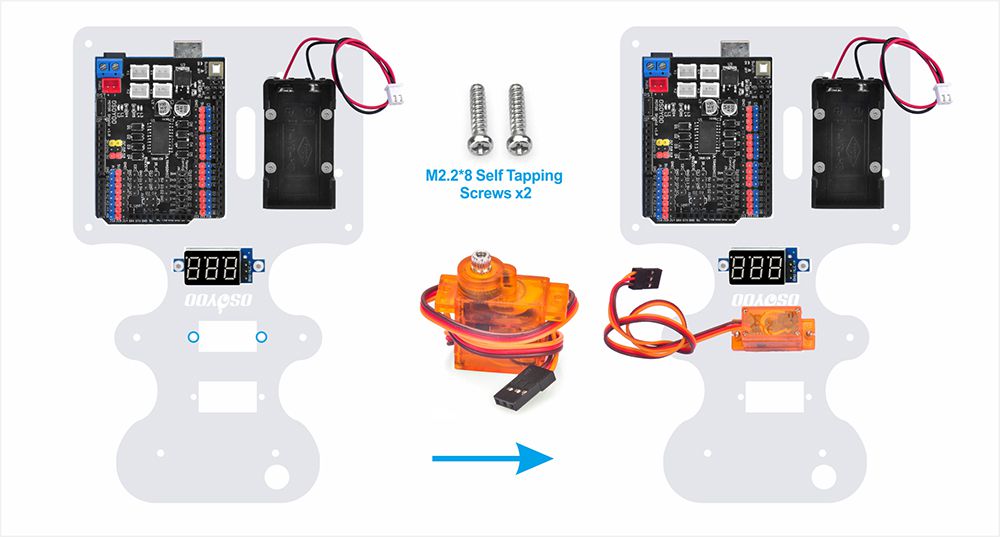
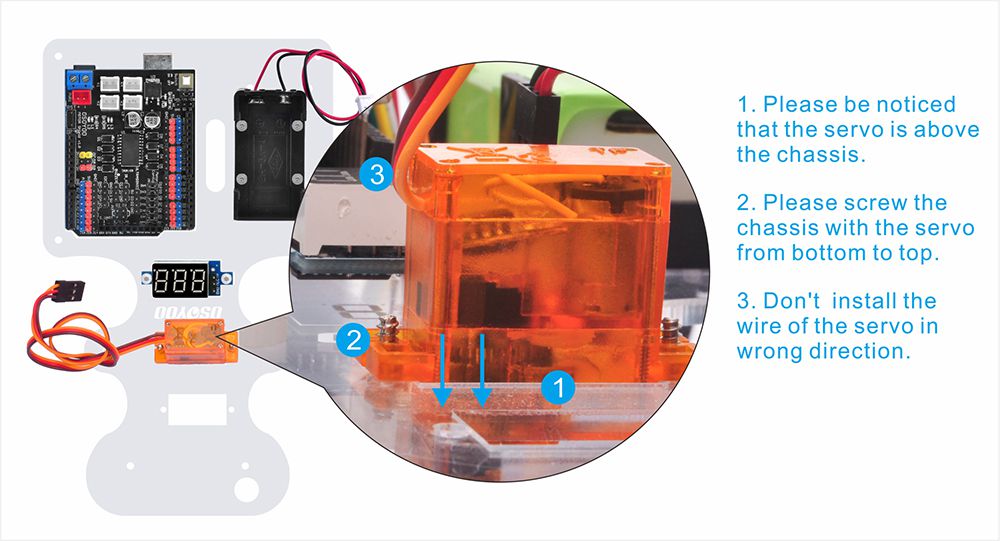
16. Installez le servomoteur MG90S (orange) sur le châssis supérieur de la voiture de haut en bas avec 2pcs M2.2 * 8 autotaraudeurs comme suit :
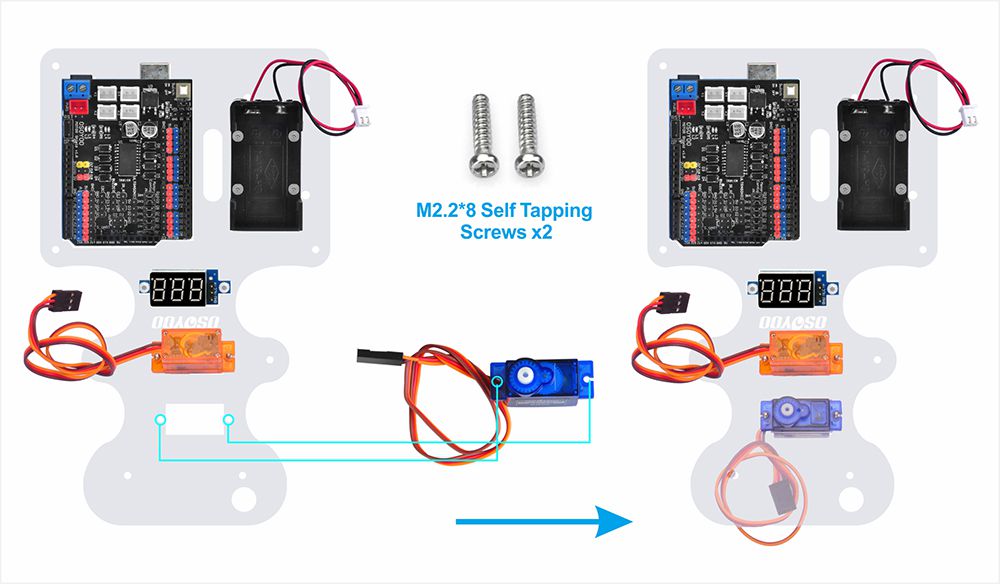
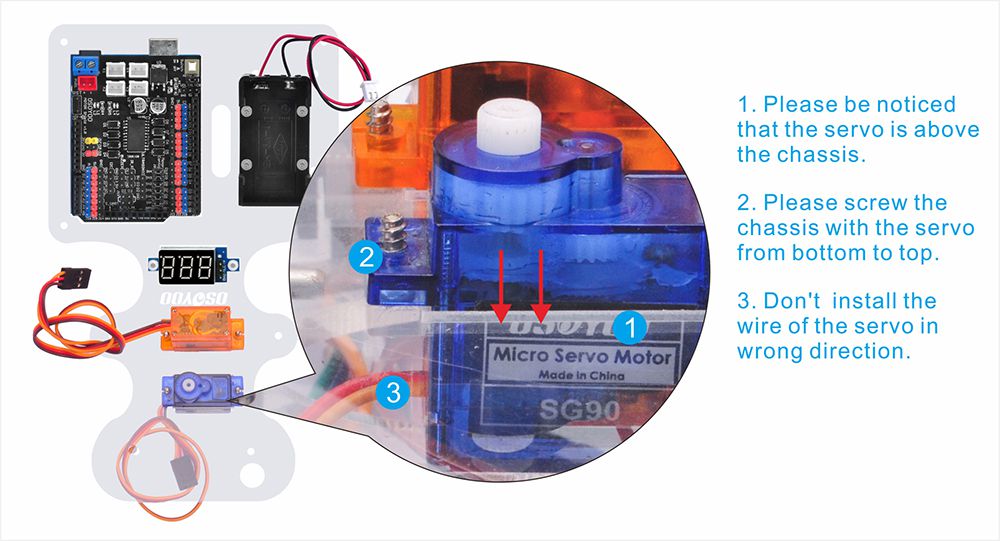
17. Installez le servomoteur (bleu) sur le châssis supérieur de la voiture de bas en haut avec 2pcs M2.2 * 8 autotaraudeurs comme suit
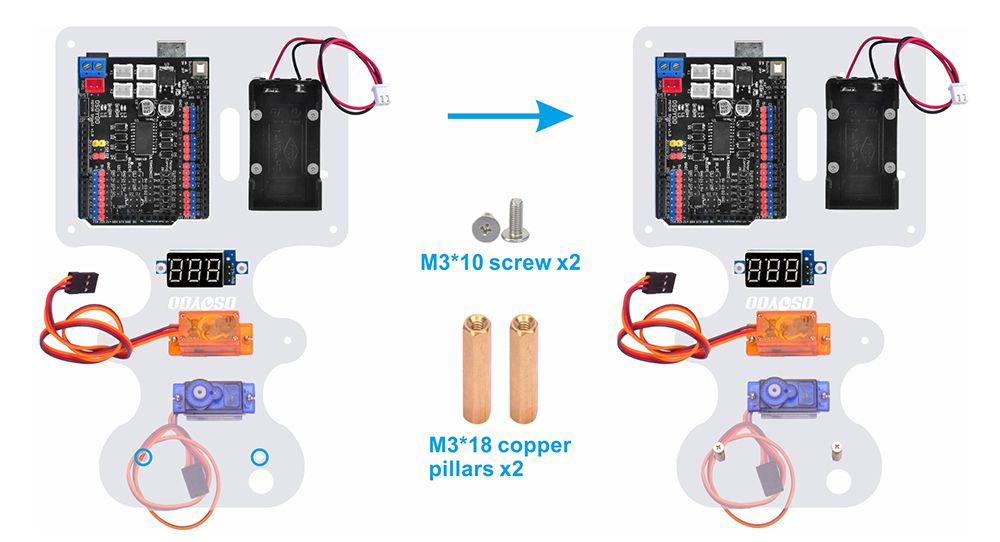
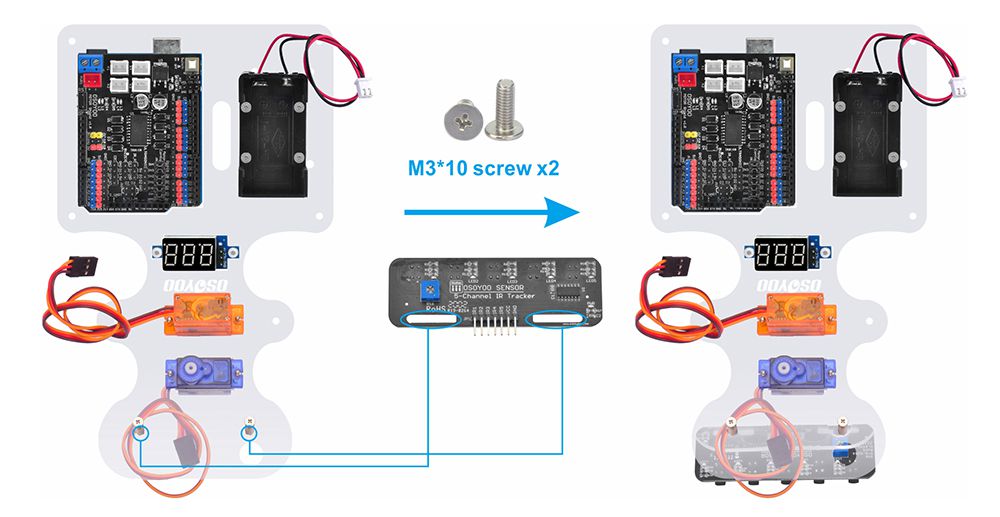
18. Installez 2pcs M3 * 18 piliers en cuivre sous le châssis supérieur de la voiture avec 2pcs M3 * 10 vis comme suit
19. Installez le module de capteur de suivi sous les piliers en cuivre M3 * 18 avec des vis M3 * 10 2pcs comme suit
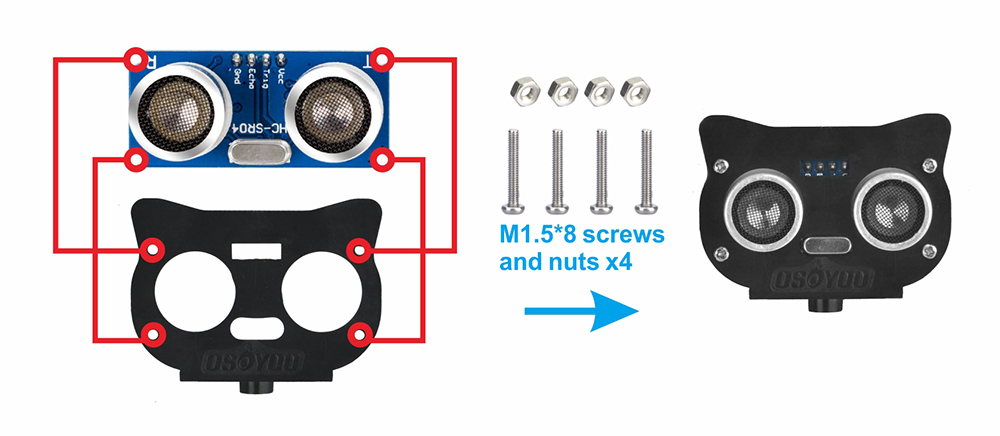
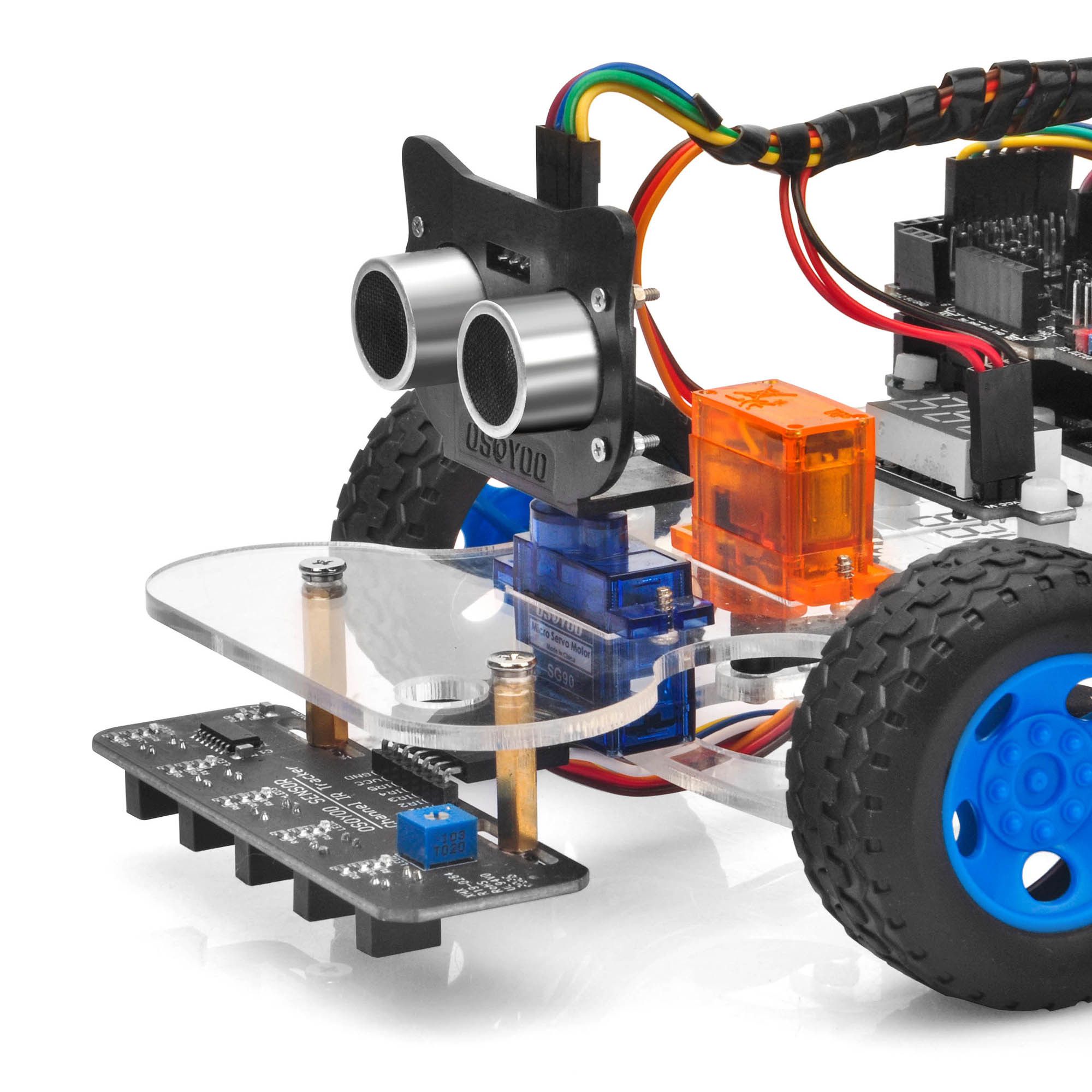
20. Installez le module à ultrasons pour monter le support avec la vis 4pcs M1.5 * 8 et les écrous M1.5 comme suit
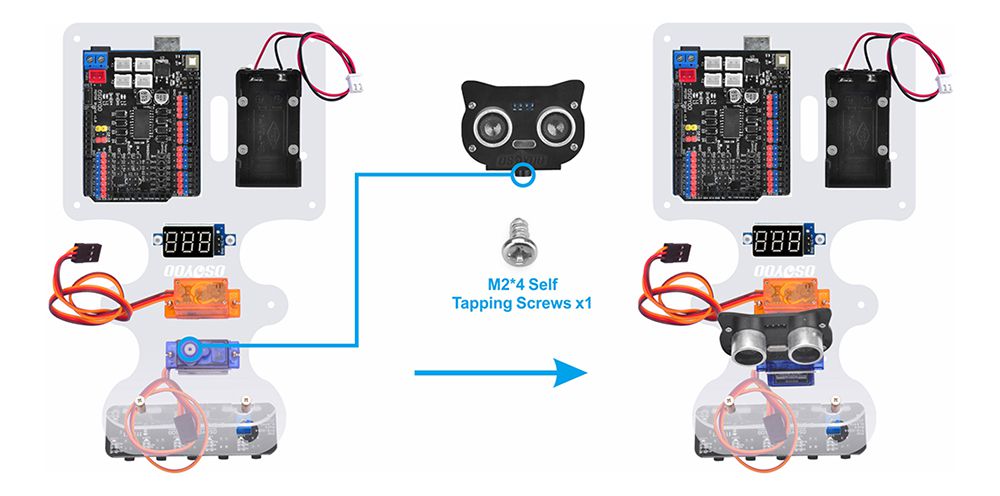
21. Installez le support de montage pour module à ultrasons sur le servomoteur avec vis autotaraudée M2 * 4 comme suit
22. Fixez la coupelle de direction sous le châssis supérieur de la voiture avec 2pcs M3 * 8 autotaraudeuses comme suit (Remarque : après avoir fixé la coupelle de direction au châssis supérieur, il doit toujours être possible de faire tourner facilement la coupelle autour de l’axe de la vis):
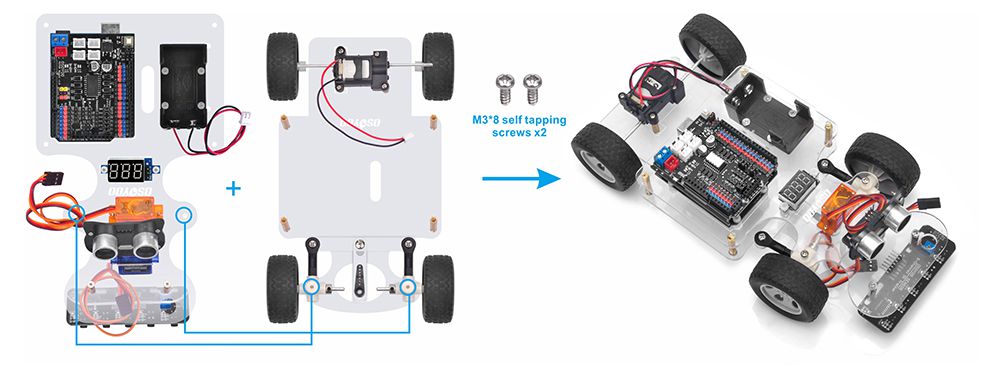
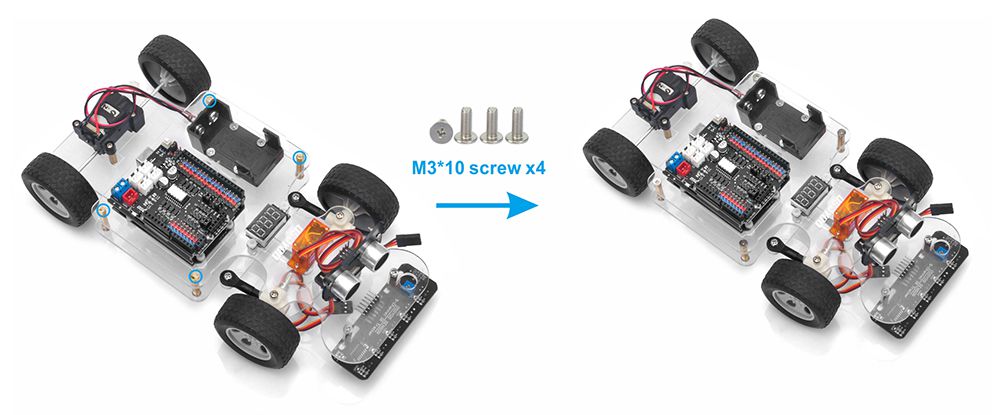
23. Fixez le châssis supérieur de la voiture et le châssis inférieur de la voiture avec 4pcs M3 * 10 vis comme suit
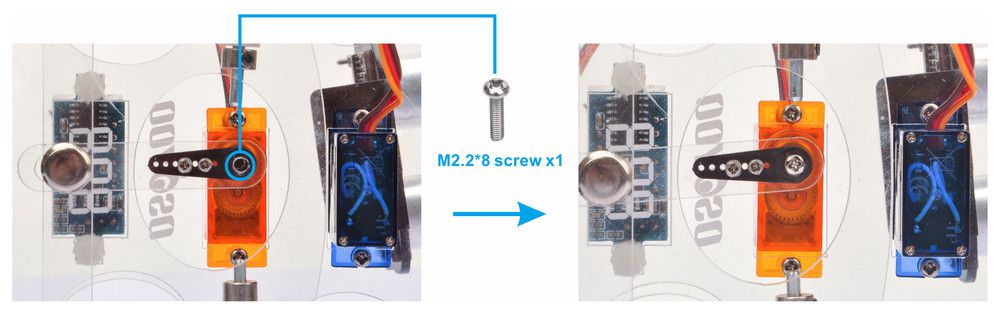
24. Correction du servomoteur MG90S (orange) sur le klaxon de servocommande noir avec 1pc M2.2 * 8 auto-taraudage vis comme suit
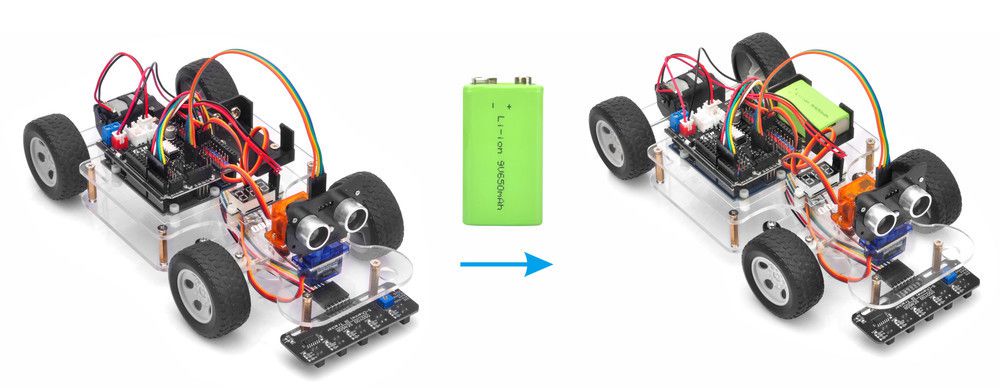
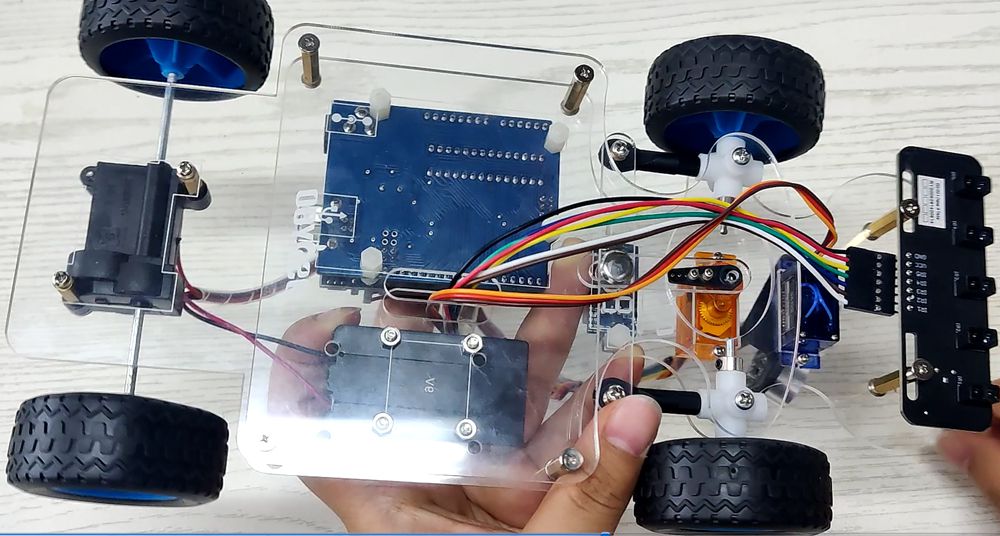
24. Installez la batterie 9V comme suit
Connexion
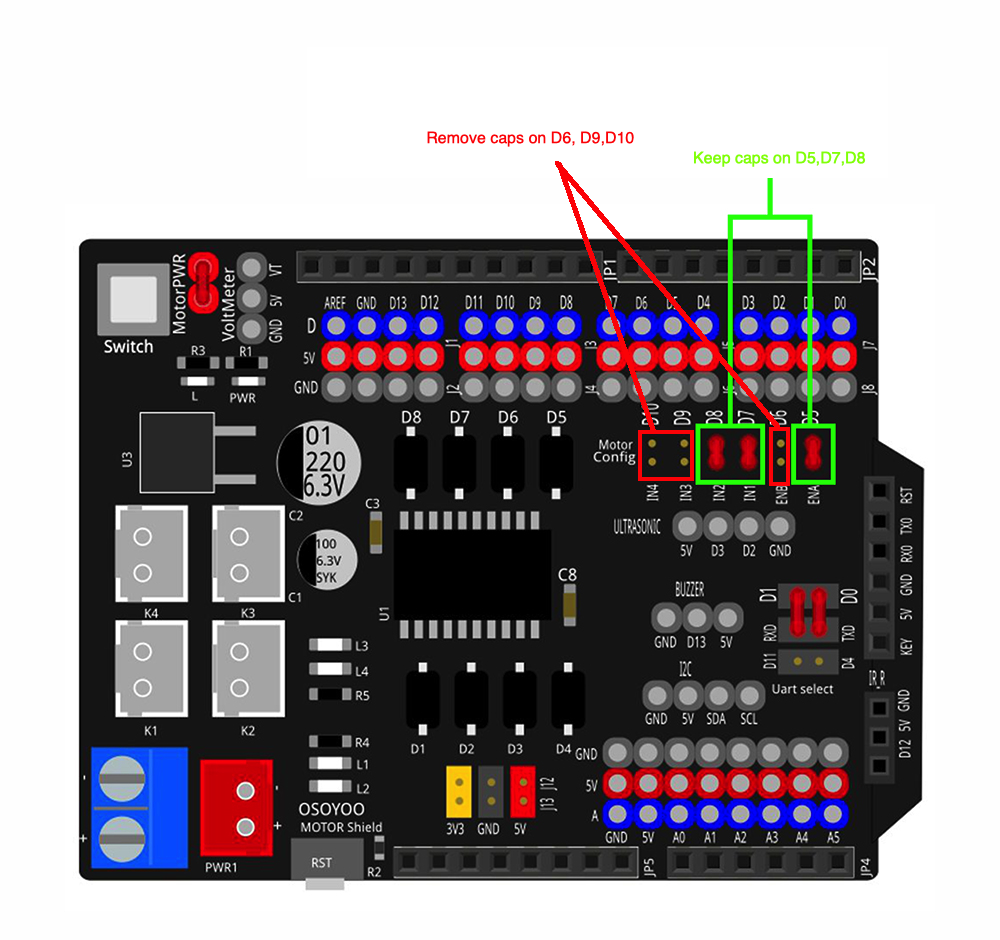
1) Retirez les capuchons de démarrage sur ENB-D6, IN3-D9, IN4-D10
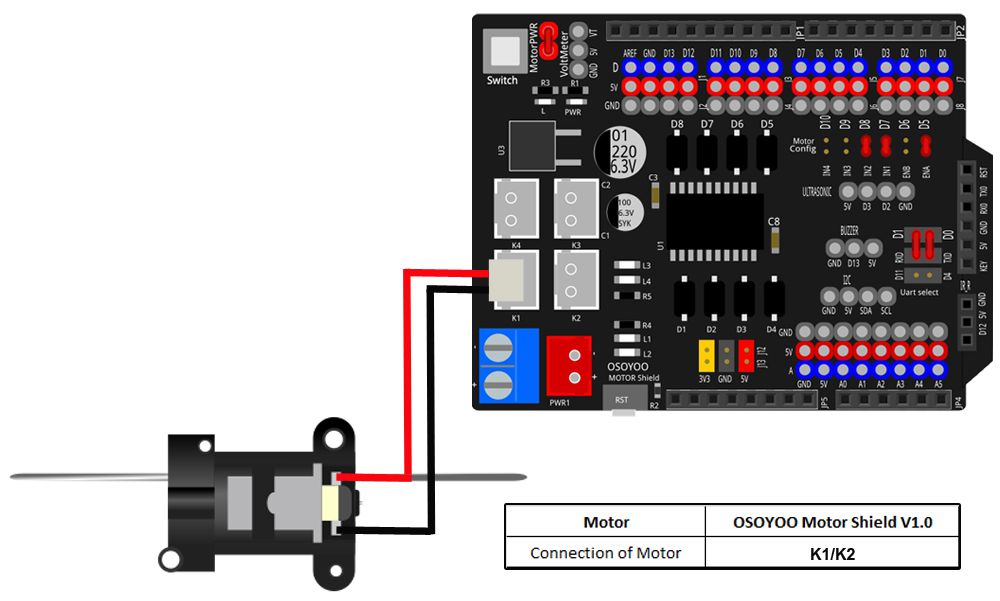
2) Connectez le moteur à K1 ou K2 d’OSOYOO Motor Shield :
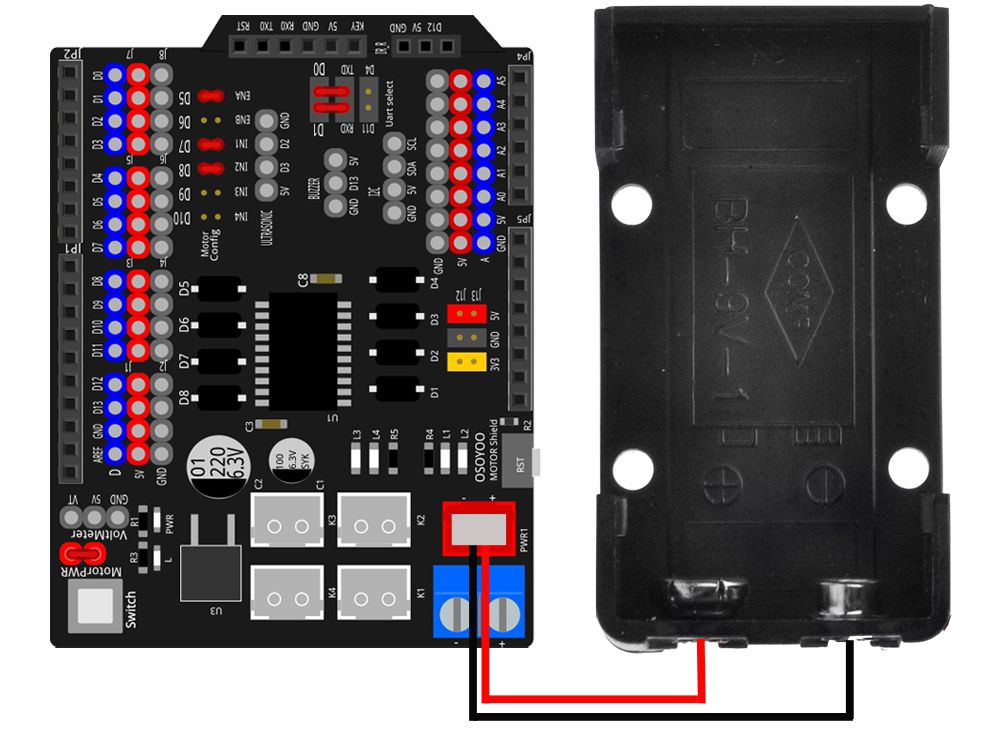
3) Connectez le boîtier de la batterie à OSOYOO Motor Shield comme suit :
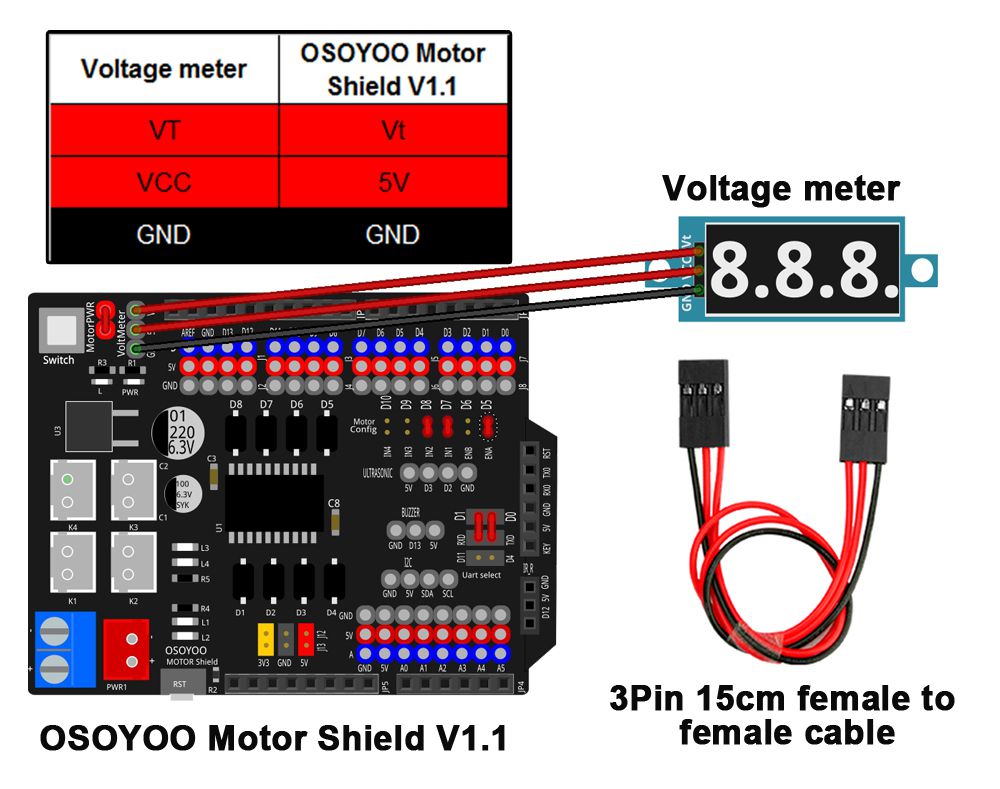
4) Connectez le voltmètre au OSOYOO Motor shield comme suit :
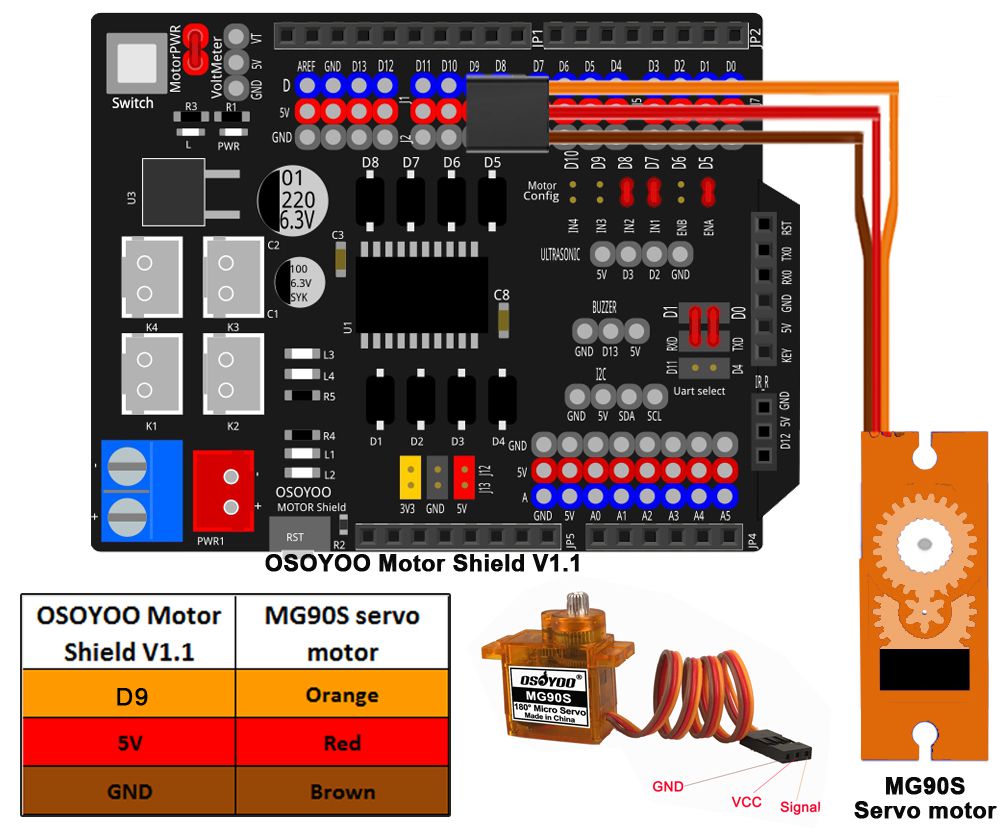
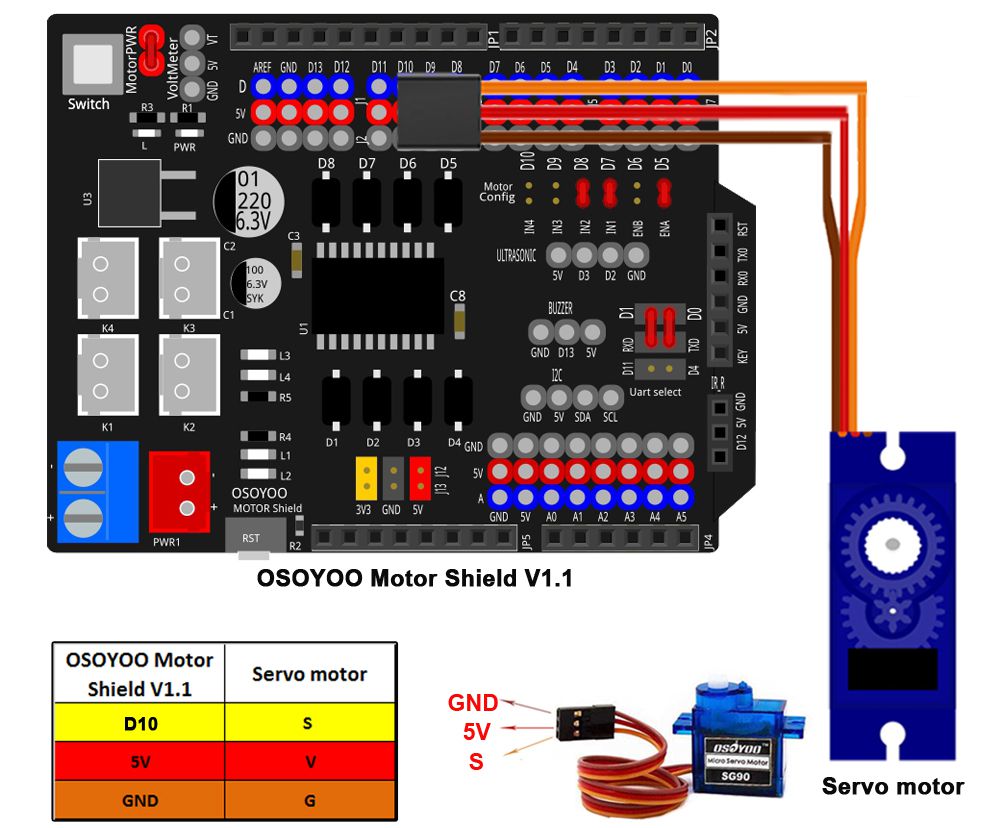
5) Connectez le servo du moteur MG90S (orange) au D9 d’OSOYOO Motor Shield comme suit :
6) Connectez le servomoteur (bleu) au D10 d’OSOYOO Motor Shield comme suit:
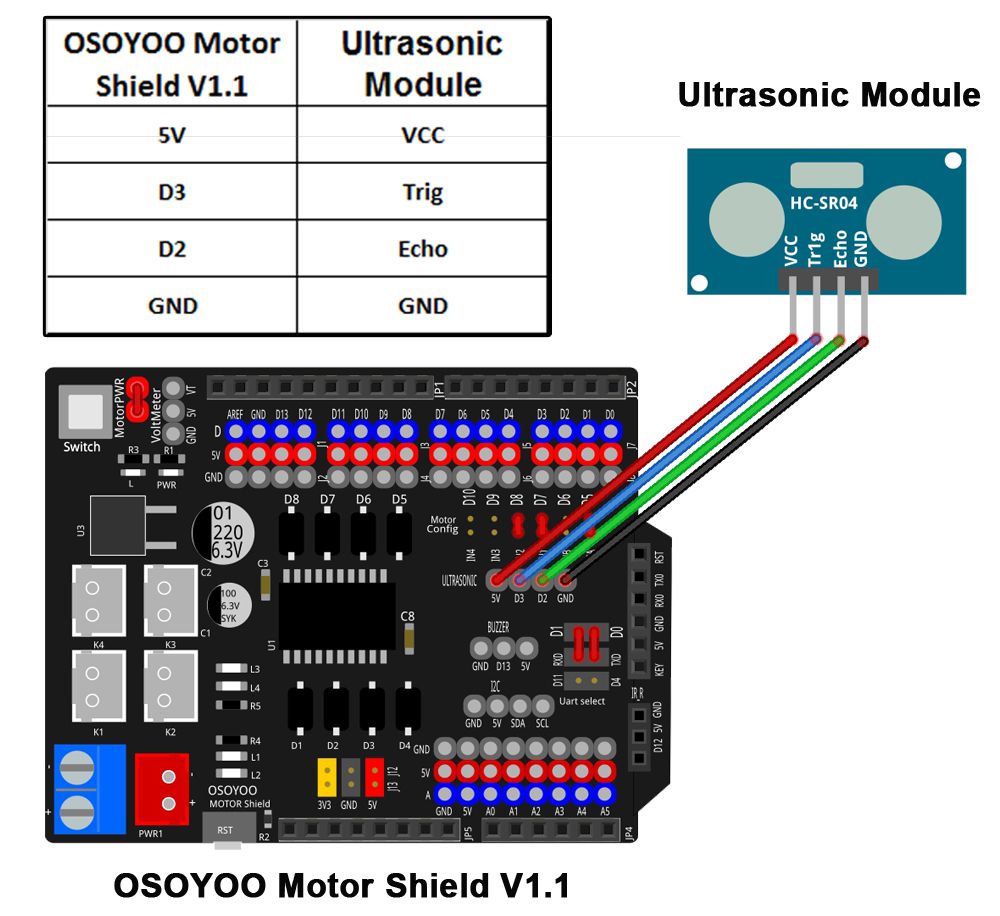
7) Connectez le capteur à ultrasons à OSOYOO Motor Shield comme suit :
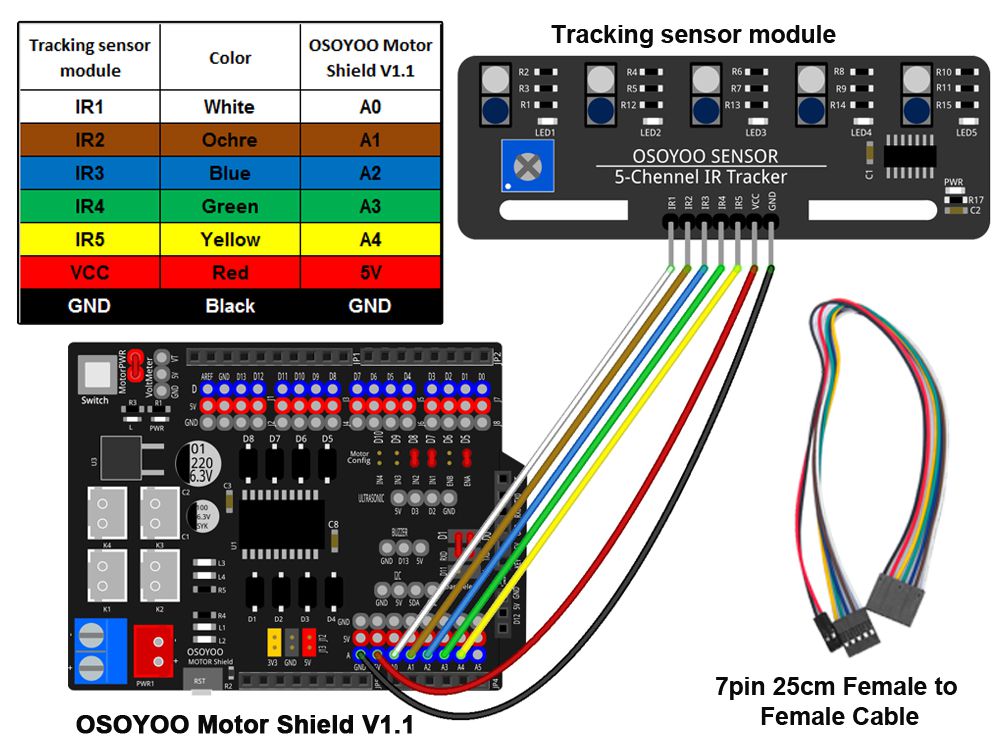
8) Connectez le module de capteur de suivi à OSOYOO Motor Shield comme suit :
Maintenant, l’installation du matériel est presque terminée. Avant d’installer la batterie dans la boîte, nous devons d’abord télécharger l’exemple de code dans Arduino.
Installez le dernier IDE Arduino (si vous avez une version Arduino IDE après 1.1.16, veuillez ignorer cette étape). Téléchargez Arduino IDE à partir de https://www.arduino.cc/en/software, puis installez le logiciel.
2. Installez un utilitaire zip pour décompresser le fichier de code, tel que 7 zip
Alignement du servo de direction
Avant d’exécuter l’exemple de code d’esquisse, testez d’abord la direction du servo de direction.
Vous pouvez maintenant télécharger et installer le fichier de croquis de test d’asservissement de la leçon 1 (steering.ino)
Étape 2. Décompressez ce fichier, vous verrez un dossier nommé servo, entrez ce dossier, vous trouverez un fichier steering.ino.
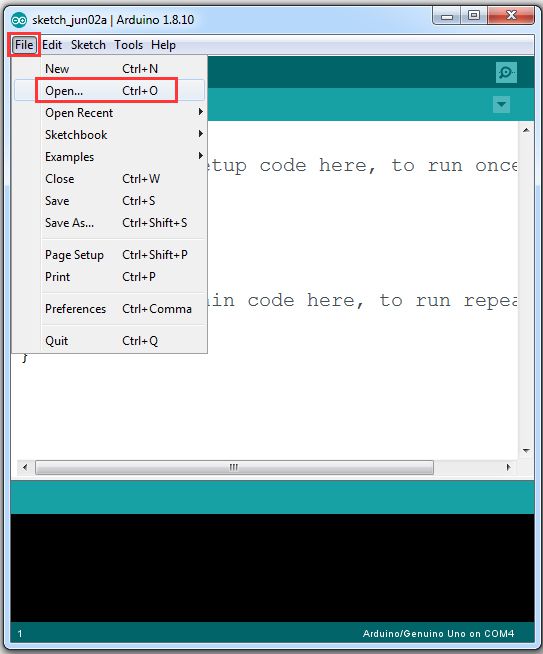
Étape 3. Connectez la carte UNO R3 au PC avec un câble USB, ouvrez Arduino IDE → cliquez sur fichier → cliquez sur Ouvrir → choisissez le code « steering.ino » dans le dossier de direction, chargez le code dans OSOYOO Basic Board for Arduino
Remarque : Coupez votre batterie ou débranchez votre adaptateur secteur lorsque vous téléchargez le code d’esquisse sur OSOYOO Basic Board for Arduino.
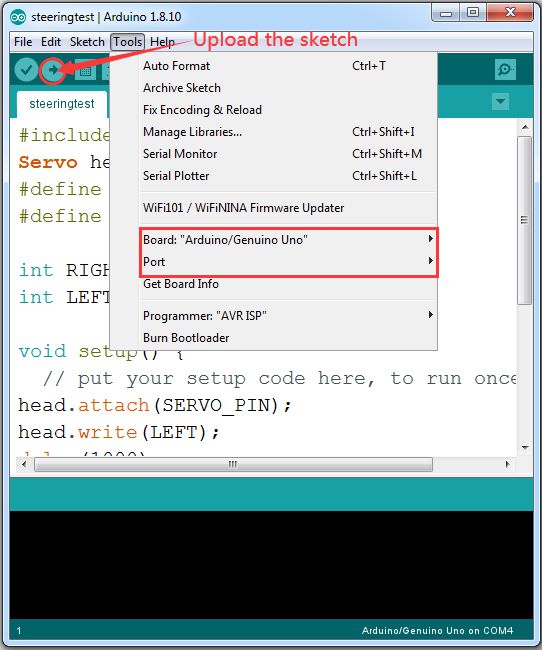
Étape 4. Choisissez la carte / port correspondant à votre projet, téléchargez l’esquisse sur le tableau.
Étape 5. Si votre servo de direction n’est pas orientée vers le centre avant, vous avez deux options : Option 1) Utilisez un tournevis pour libérer le bras de direction du servo, réalignez manuellement la direction des roues, puis fixez à nouveau le bras sur le servo.
Option 2) Vous pouvez modifier la valeur par défaut de la ligne 4
#define FRONT 90
Si vos volants ont tendance à gauche, augmentez la valeur de 90 à 95 100 105 …
Si vos volants ont tendance à être droits, diminuez la valeur de 90 à 85,80,75…
Exécutez à nouveau le croquis jusqu’à ce que vos volants soient enfin orientés vers l’avant.
Ensuite, notez la valeur FRONT, nous utiliserons cette valeur pour changer le code d’esquisse de la leçon 2, 3, 4, 5,6 et rendre le servo de direction toujours orienté vers l’avant à la valeur FRONT par défaut.
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.


































Bonjour,
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
Cordialement,
Noah
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.