Dans ce projet, nous utilisons deux capteurs de suivi IR pour concevoir une voiture robot de suivi de ligne simple. Un robot de suivi de ligne, comme son nom l’indique, est un véhicule à conduite automatique qui suit une ligne de piste noire imprimée sur fond blanc. Les capteurs de suivi dans le robot continuent de vérifier si l’emplacement actuel de la voiture est hors de la piste. Si oui, la voiture fera un mouvement négatif pour ramener la voiture robot sur la piste.
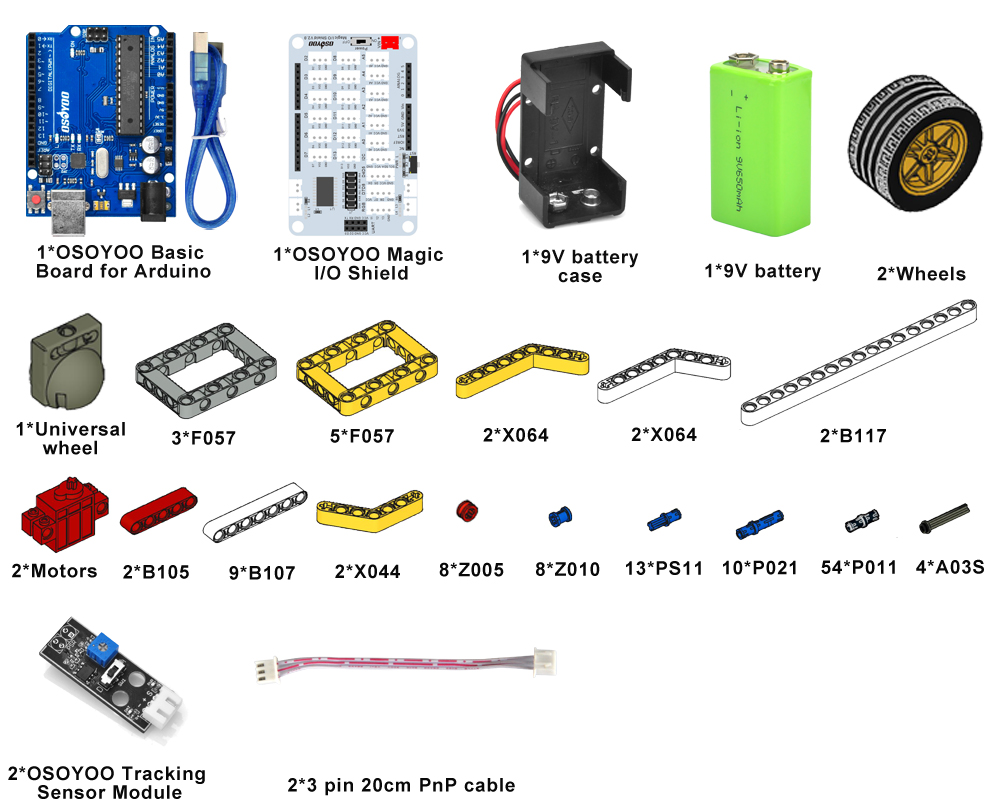
Veuillez préparer les parties suivantes pour mener à bien ce projet REMARQUE:
1..La couleur du bloc de construction est soumise au produit réel, ce qui n’affecte pas l’utilisation.
2. TOUS LES PRODUITS OSOYOO POUR ARDUINO SONT DES CARTES TIERCES ENTIÈREMENT COMPATIBLES AVEC ARDUINO
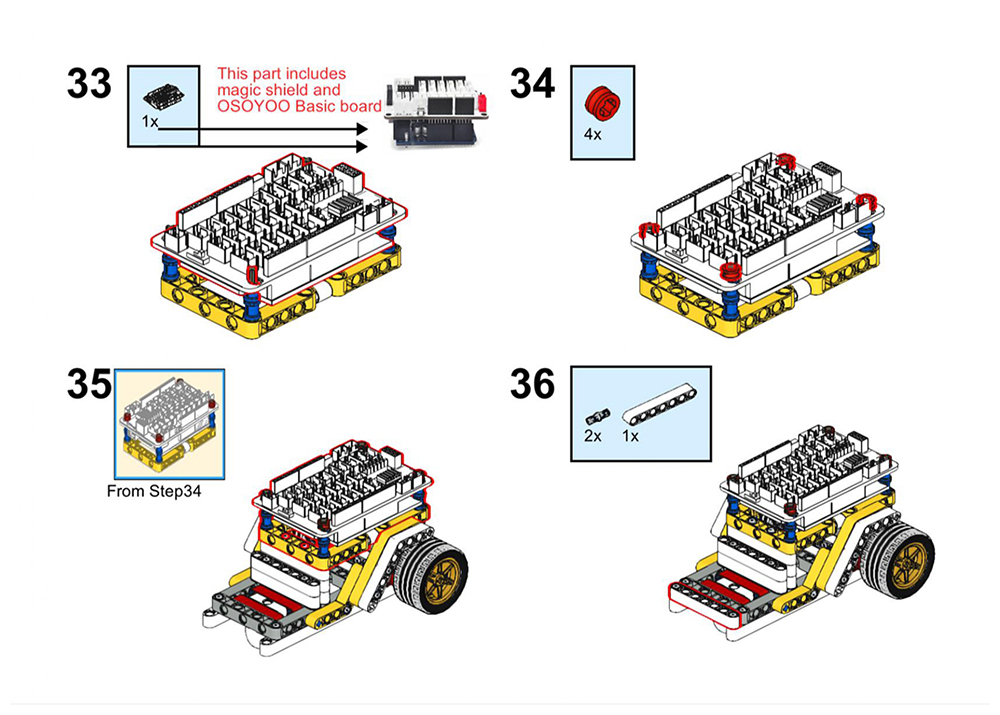
Avant de construire le robot avec des blocs, veuillez installer la carte de base OSOYOO pour Arduino sous le shield OSOYOO Magic I/O comme suit (Attention s’il vous plaît : les broches du shield d’E/S sont alignées avec le port de base de la carte d’abord, puis appuyez fermement sur le shield sur la carte.)
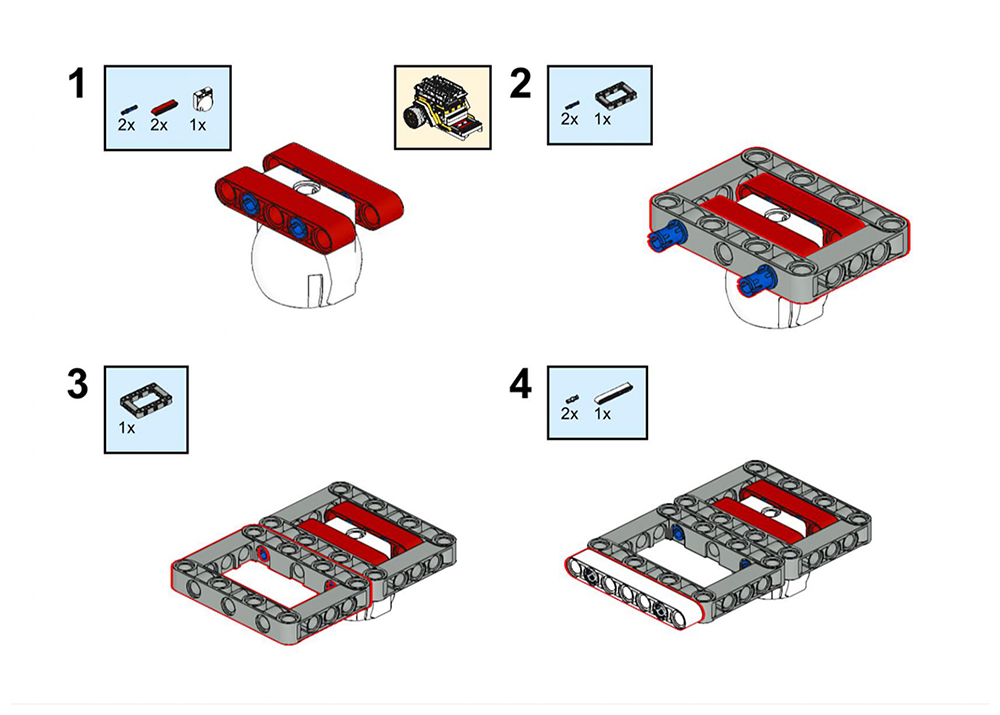
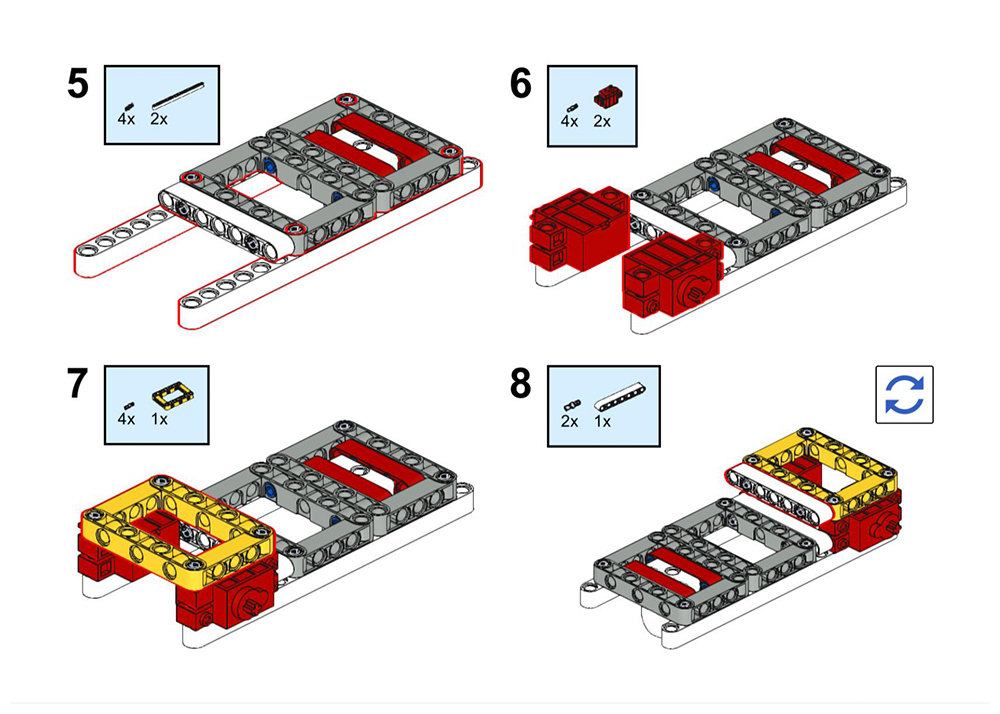
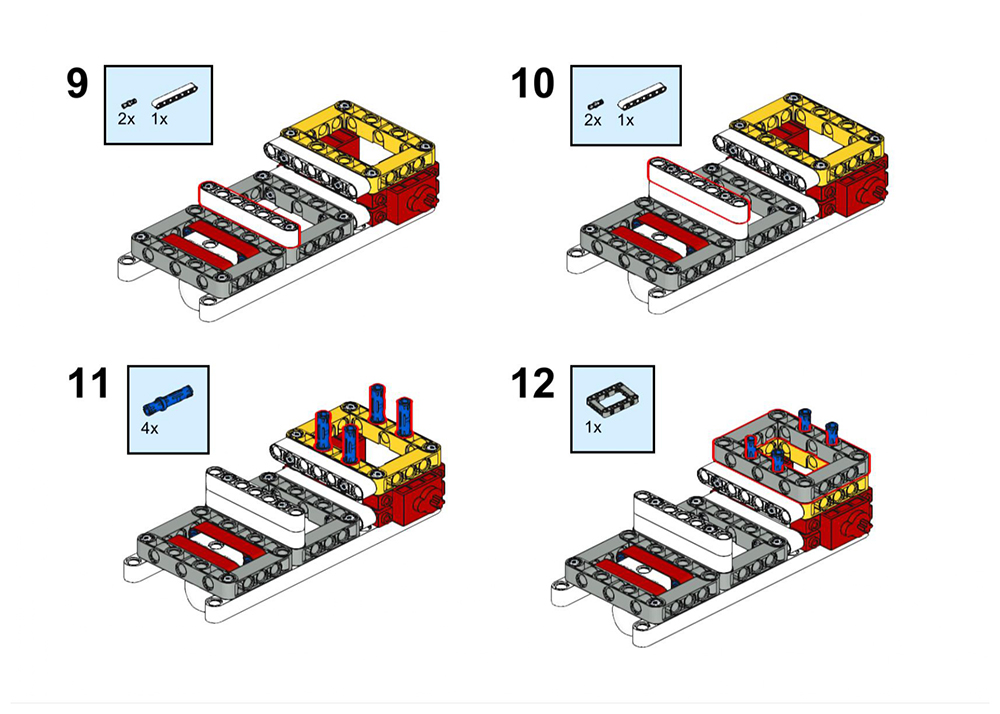
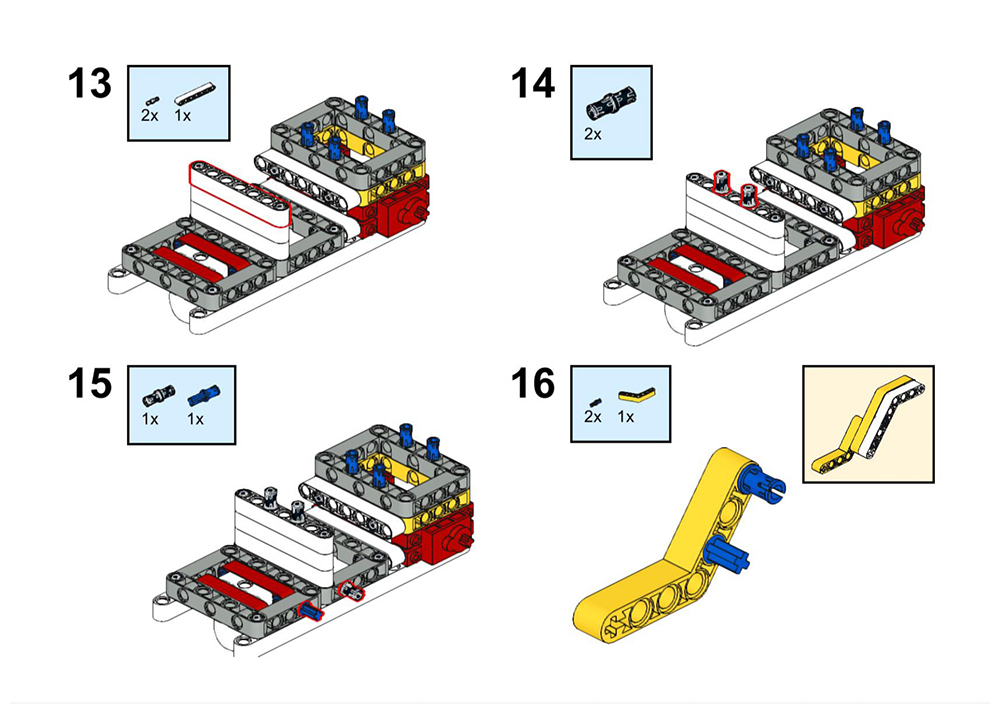
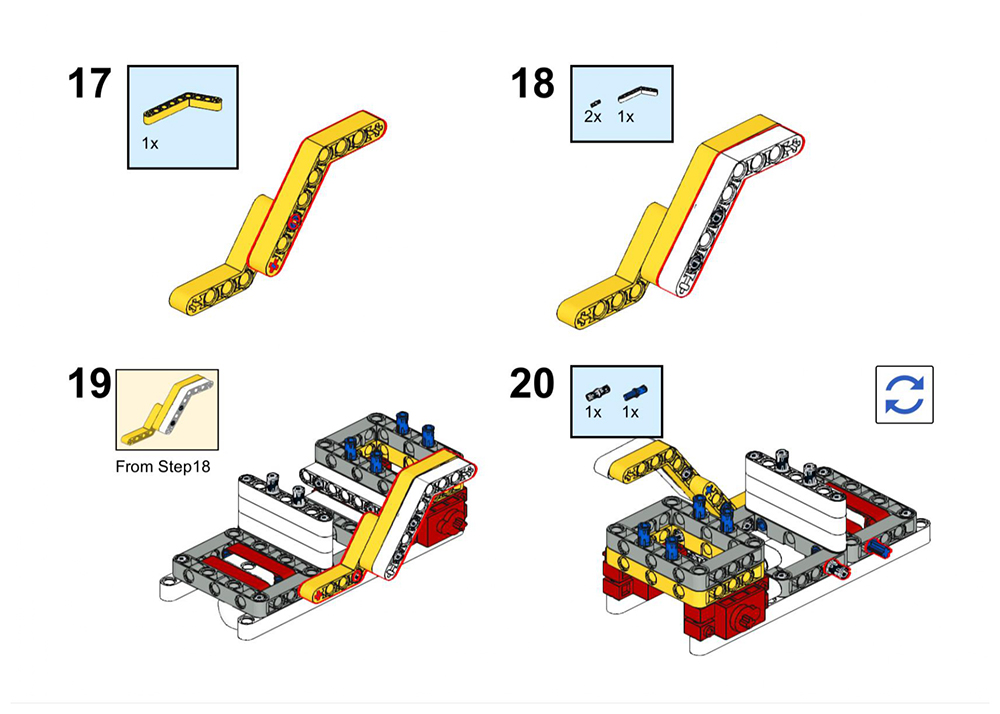
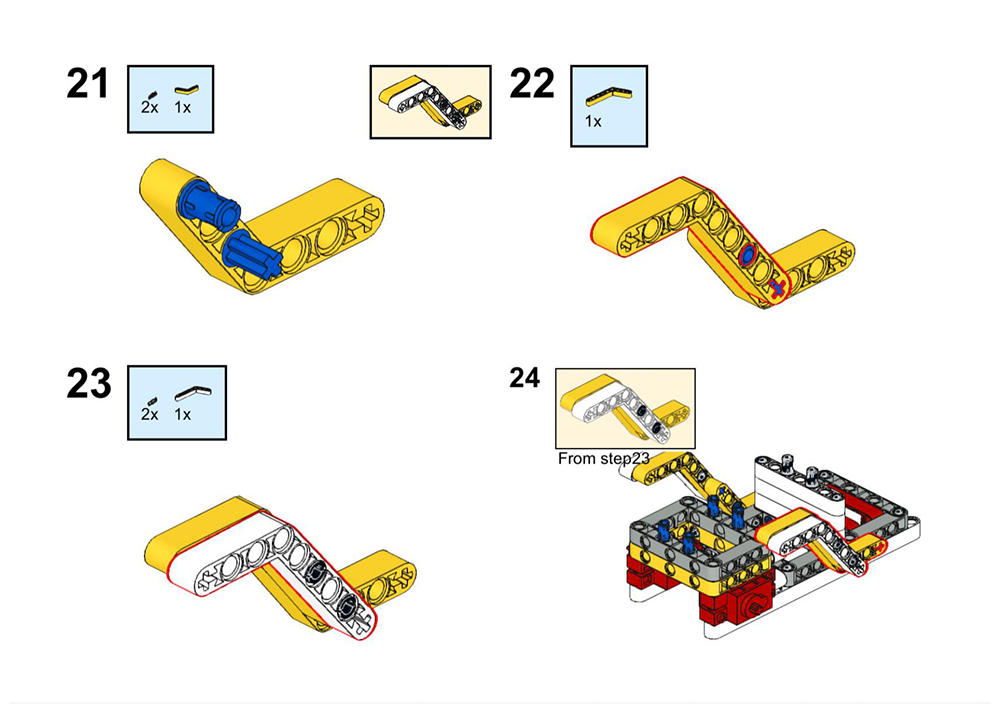
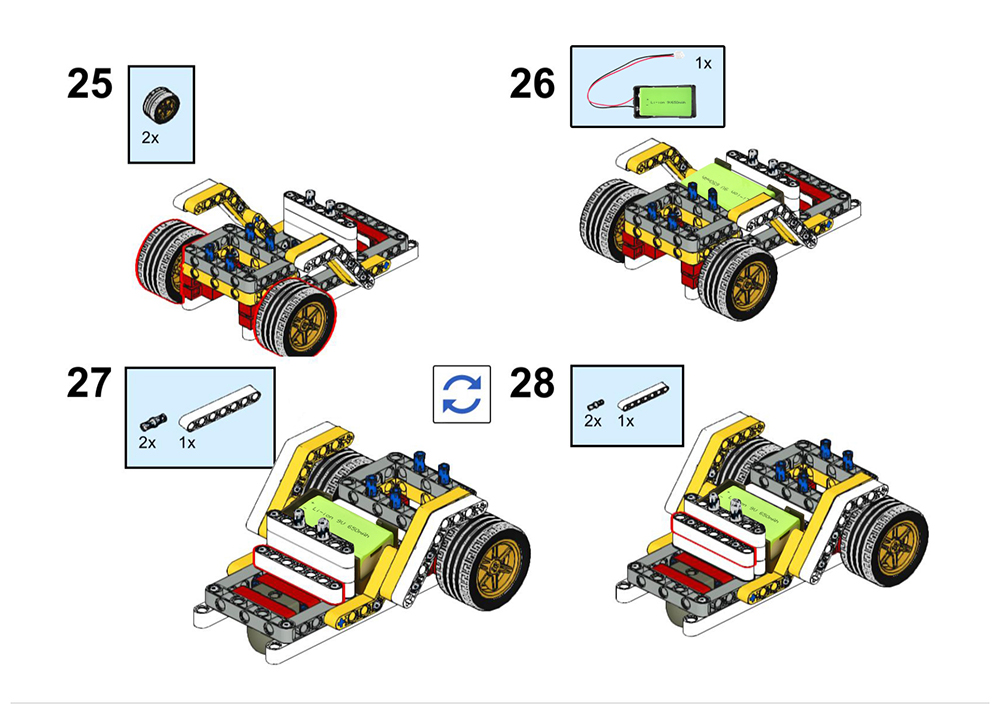
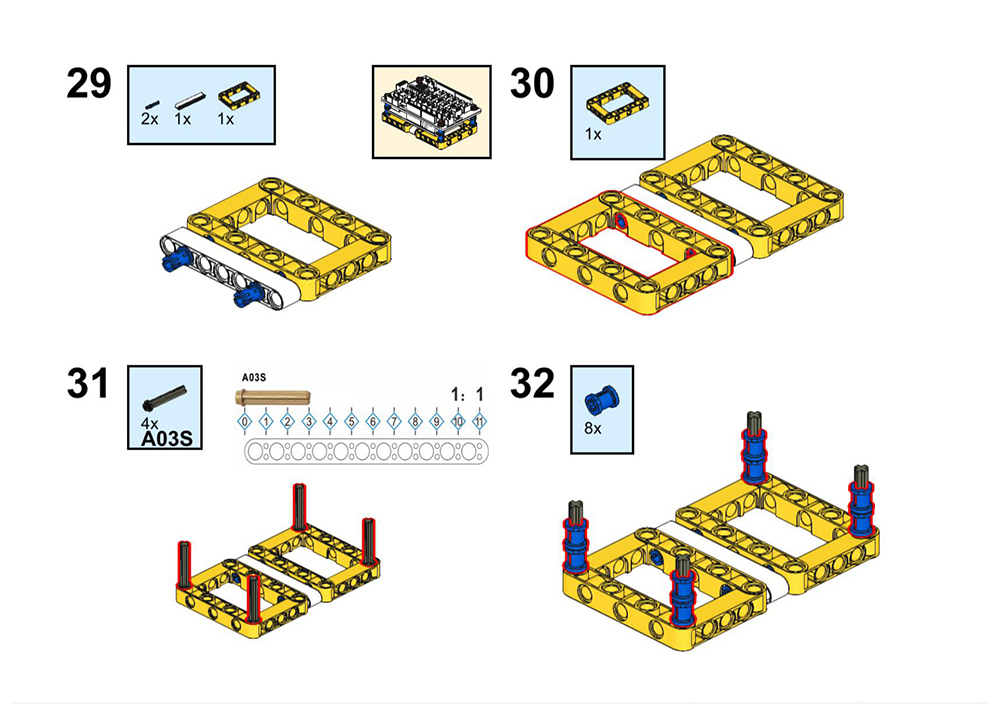
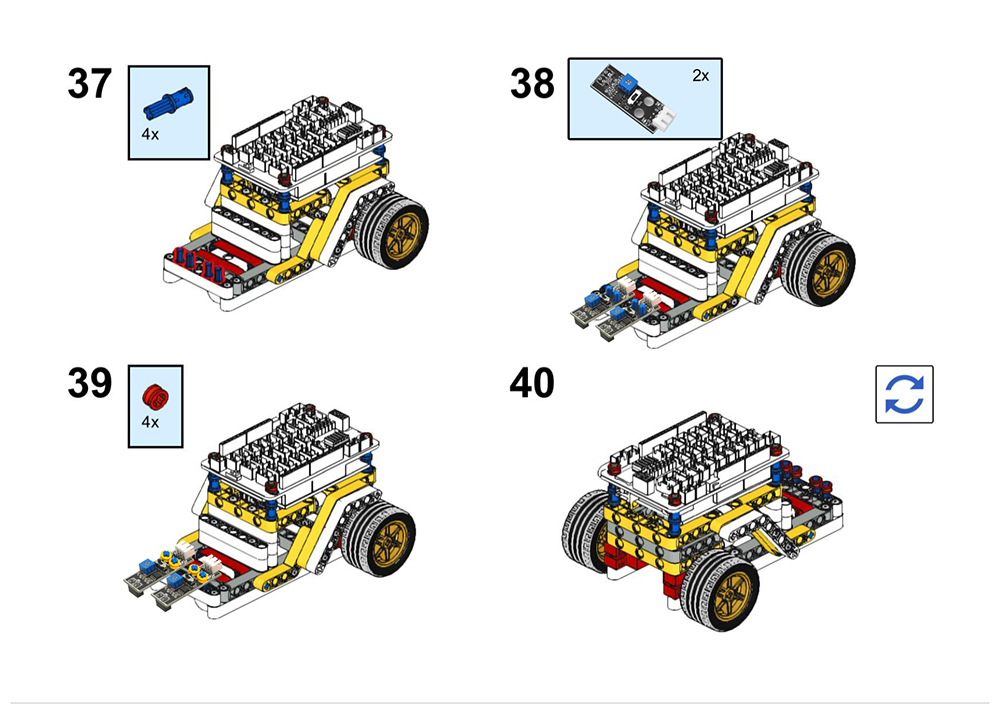
Veuillez suivre les étapes de construction pour construire cette voiture robotisée, Si vous souhaitez obtenir des étapes de construction PDF claires, veuillez télécharger à partir de https://osoyoo.com/picture/Building_Robot_Car/lesson2/LESSON2.pdf Remarque: Si vous avez construit la voiture robot pour leçon1, veuillez passer à l’étape35 de ce PDF.
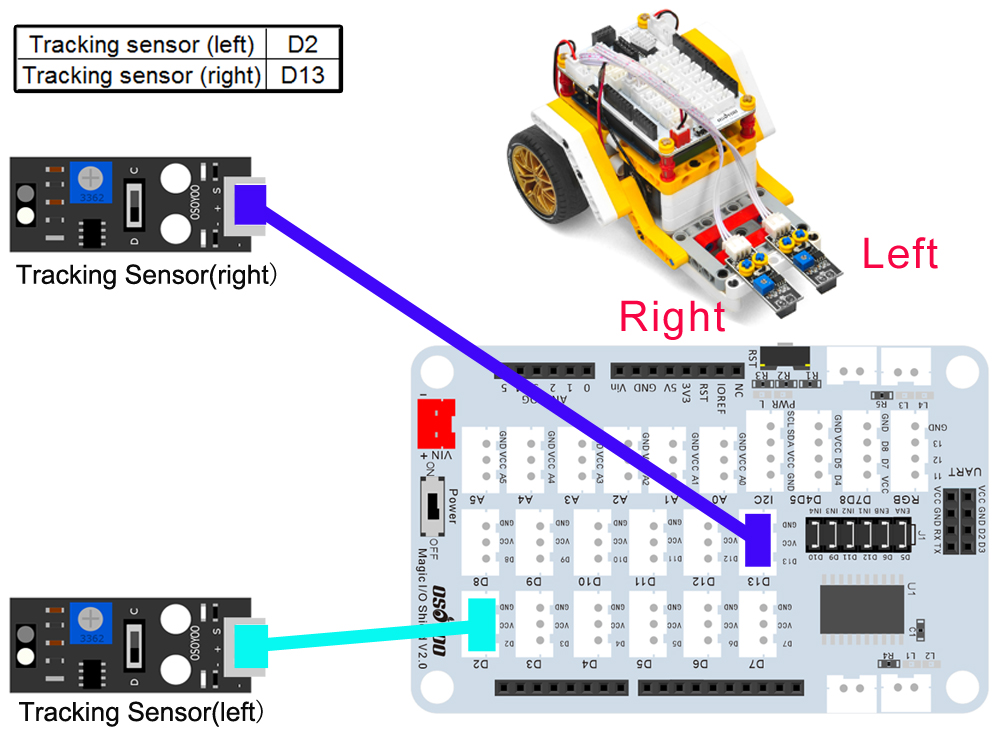
Veuillez connecter les moteurs et le boîtier de la batterie 9V comme leçon1. Ensuite, connectez le capteur de suivi gauche au D2 du shield Magic I/O, à droite au port D13 avec des câbles PNP à 3 broches comme ci-dessous (attention s’il vous plaît: il y a six capuchons de cavalier sur ENA / ENB / IN1 / IN2 / IN3 / IN4):
Remarque: Dans ce kit, nous utilisons mblock comme outil de programmation, si vous voulez en savoir plus sur mblock, veuillez visiter la préparation avant la classe 1: https://osoyoo.com/2021/12/01/preparation-before-class-1
Étape 1) Téléchargez la version PC de mBlock à partir de https://mblock.makeblock.com/en-us/download/, sélectionnez le fichier de téléchargement selon le type de système d’exploitation de votre ordinateur (veuillez ne pas utiliser la version du navigateur):
Étape 2) Téléchargez le fichier de périphérique OSOYOO_UNO.mext à partir de https://osoyoo.com/driver/mblock/osoyoo_uno.mext
Étape 3) Exécutez le logiciel mBlock PC en double-cliquant sur la belle icône Panda. Vous semblerez Bloquer l’interface utilisateur comme l’image suivante. Veuillez supprimer l’appareil par défaut CyberPi en cliquant sur la croix dans le cercle rouge.
Étape 4) Faites glisser et déposez osoyoo_uno_mext fichier (téléchargé à l’étape 2) vers le logiciel mBlock comme suit:
Vous verrez maintenant un nouveau firmware dans mBlock, voir l’image suivante :
Maintenant, le logiciel mBlock et le firmware de l’appareil OSOYOO_UNO ont été installés avec succès sur notre PC !
Nous allons maintenant vous montrer comment utiliser les blocs pour transformer l’idée ci-dessus en réalité.
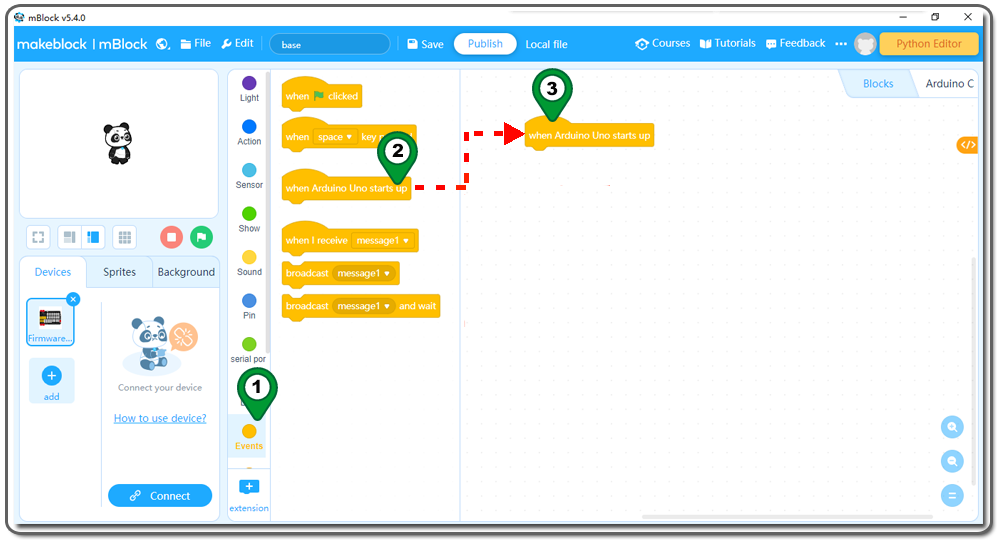
Étape 5 : Cliquez sur Events, ajoutez le bloc when Arduino UNO starts up en haut :
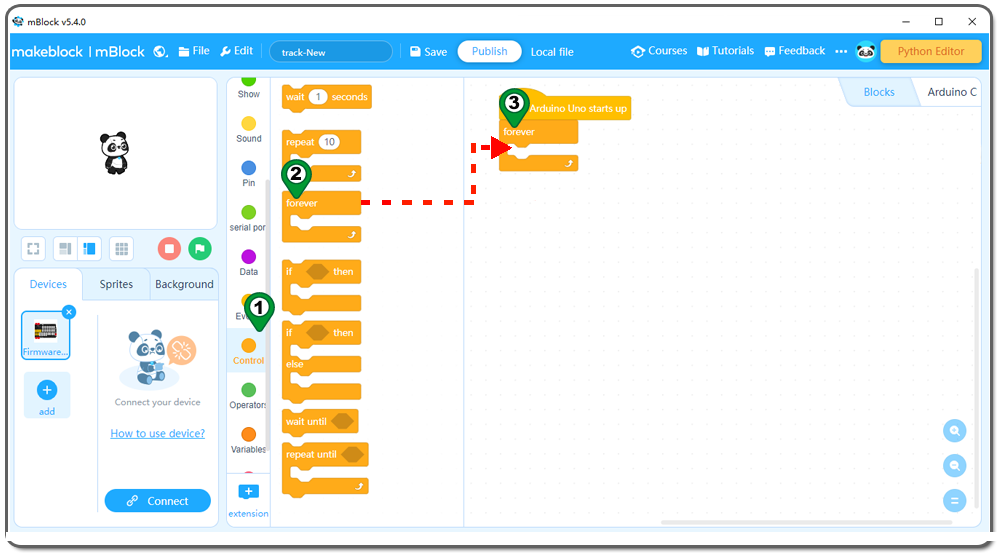
Étape 6 : Cliquez sur Control, puis faites glisser et déposez le bloc Forever dans la zone de programmation comme indiqué ci-dessous :
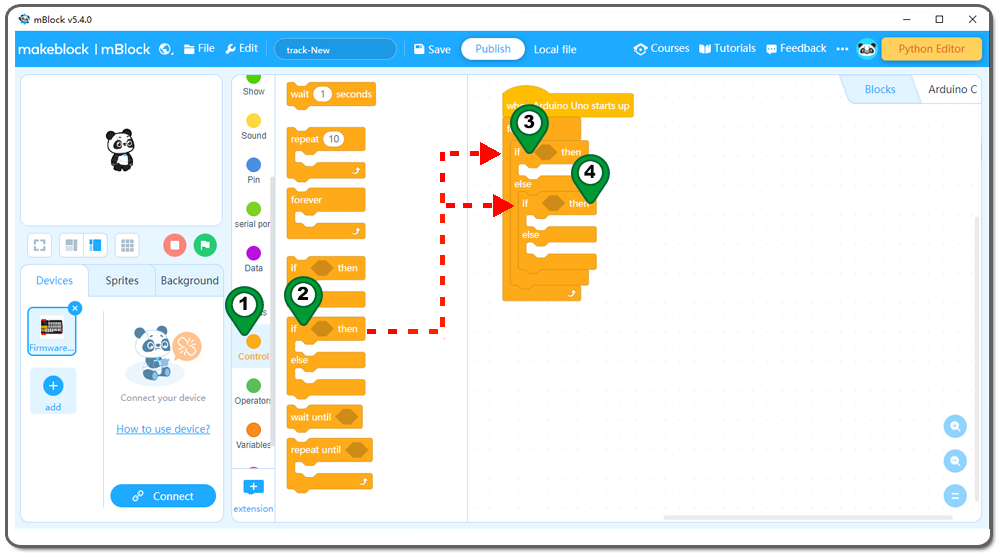
Étape 7 : Cliquez sur Control, ajoutez un bloc if else à l’intérieur de la boucle forever, puis ajoutez un autre bloc if else à l’intérieur de la zone else du premier bloc if else :
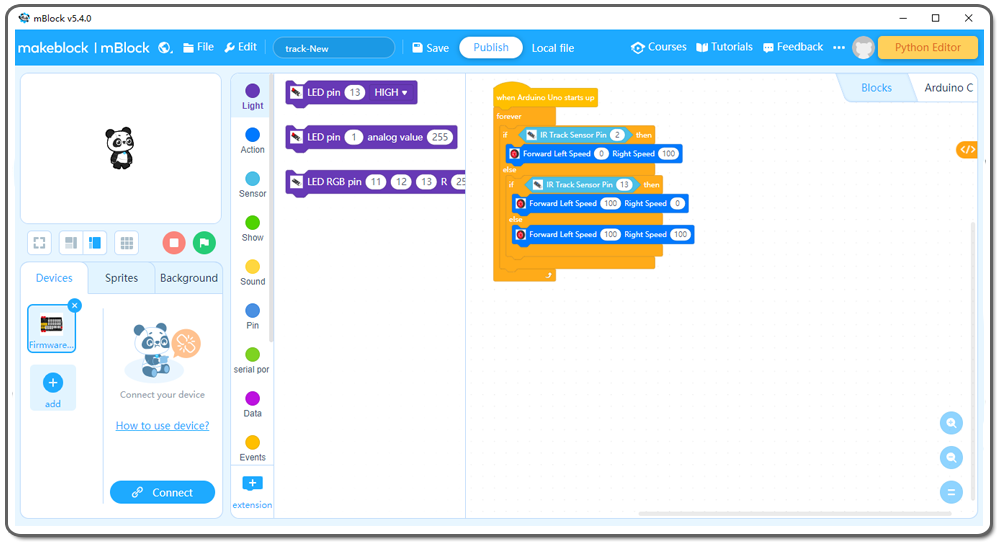
Étape 8 : Cliquez sur Sensor,, ajoutez 2 pièces de la broche IR Tracking Sensor Pin 2, 2 blocs à l’intérieur de la zone de condition, modifiez la deuxième broche de 2 à 13 comme suit :
Étape 9 : Cliquez sur la catégorie Action, ajoutez 3 blocs Backward Left Speed 100 Right Speed 100 à l’intérieur des blocs if else, modifiez la première vitesse Right de 100 à 0, modifiez la deuxième vitesse Left de 100 à 0 :
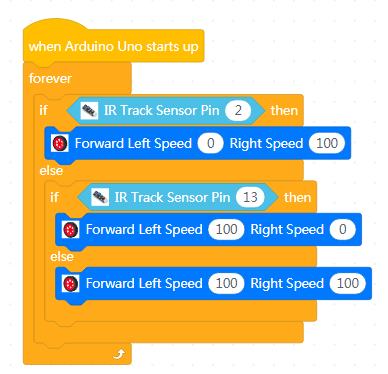
Nous avons maintenant terminé la programmation par blocs. Les derniers blocs ressemblent à ce qui suit :
Étape 10) Téléchargez le programme sur la carte de base OSOYOO
1) Veuillez d’abord connecter votre carte de base OSOYOO à votre PC avec un câble USB. Cliquez ensuite sur le bouton Connecter en bas du logiciel mBlock, vous verrez une fenêtre USB apparaître,
2) sélectionnez la case à cocher Afficher tous les périphériques connectables, puis un menu déroulant de périphérique apparaîtra,
3) sélectionnez votre port dans le menu déroulant du périphérique
4) cliquez sur le bouton Connecter pour connecter votre PC à la carte de base OSOYOO.
5) Une fois votre PC connecté à la carte de base OSOYOO, cliquez sur le bouton Télécharger en bas de votre logiciel, puis le code sera téléchargé sur la carte de base OSOYOO:
Dans la leçon 1, nous avons appris un bloc de programme Event jaune et quelques blocs Action bleus.
Dans cette leçon, nous verrons quelques nouveaux blocs de programme de la catégorie Control i)Forever Loop
Ce bloc comme une tête de crocodile qui en a à l’intérieur bloque sa souris. Ces blocs intérieurs seront exécutés dans l’ordre, après l’exécution du dernier bloc intérieur, il reviendra au premier bloc intérieur et répétera la procédure encore et encore comme une boucle.
ii) IR tracking sensor bleu Un bloc de la catégorie Sensor
Le bloc ci-dessus est un bloc hexagonal, ce qui signifie qu’il renverra la valeur Vrai ou Faux aux blocs Control.
Prenons l’exemple du bloc ci-dessus, ce bloc lira le capteur de suivi dans la broche D2 (capteur gauche), si le capteur détecte du noir, il renverra VRAI, s’il détecte du blanc, il renverra FAUX.
iii) Bloc If Else en catégorie Control
Le bloc ci-dessus comporte deux souris, ainsi qu’un bloc de condition dans la partie supérieure. Lorsque le bloc de condition renvoie la valeur True, il exécute les blocs à l’intérieur de la zone if (souris supérieure), si le bloc de condition renvoie la valeur False, il exécute les blocs à l’intérieur de la zone else (souris inférieure). iv) Un autre bloc Action qui peut contrôler la vitesse de la roue gauche et de la roue droite
Le bloc ci-dessus peut contrôler la roue gauche et la roue droite qui fonctionnent à des vitesses différentes. Dans l’exemple ci-dessus, la vitesse de la roue gauche est de 0 et celle de la roue droite de 100. Cela permet à la voiture de tourner à gauche. v)Nous pouvons maintenant revoir la fonctionnalité de l’ensemble du bloc dans cette leçon :
Les blocs de programme ci-dessus fonctionnent en boucle permanente, ce qui signifie qu’ils ne s’arrêteront jamais à moins que vous ne coupiez l’alimentation.
Le programme commence par tester le capteur gauche (broche D2) et vérifie s’il détecte une ligne noire ; si c’est le cas, il tourne à gauche.
Si le capteur gauche détecte une ligne blanche, il détectera le capteur droit (D13). Si le capteur droit renvoie la valeur True, cela signifie que la ligne noire se trouve du côté droit et que la voiture tournera à droite.
Si les deux capteurs ne détectent pas de ligne noire, cela signifie que la ligne noire se trouve au milieu et que la voiture avance.
Déconnectez Arduino du PC, mettez une batterie 9V dans la variole de la batterie (assurez-vous que la direction polaire est correcte, sinon cela peut détruire votre appareil et causer un risque d’incendie).
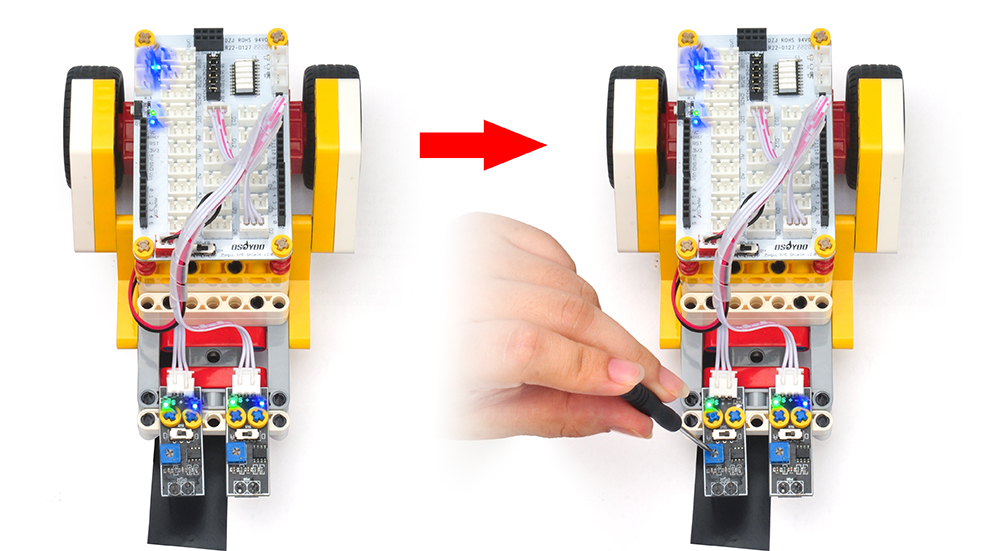
Régler la sensibilité du capteur de suivi :
Mettez la voiture en marche, maintenez-la en place et réglez la vis de sensibilité du capteur de suivi à l’aide d’un tournevis jusqu’à ce que vous obteniez la meilleure sensibilité possible : la LED indiquant le signal s’allume lorsque le capteur se trouve au-dessus d’un sol blanc et s’éteint lorsque le capteur se trouve au-dessus d’une piste noire.
Préparez une piste noire (la largeur de la piste noire est supérieure à 30 mm et inférieure à 60 mm) sur fond blanc. Veuillez noter que l’angle de braquage ((courbe de flexion) de la voie ne peut pas être deux aigus (plus de 90 degrés). Si le virage est trop brusque, la voiture sortira de la piste. Allumez la voiture et placez le milieu du module de capteur de suivi face à la piste noire, puis la voiture se déplacera le long de la piste noire































 Préparez une piste noire (la largeur de la piste noire est supérieure à 30 mm et inférieure à 60 mm) sur fond blanc. Veuillez noter que l’angle de braquage ((courbe de flexion) de la voie ne peut pas être deux aigus (plus de 90 degrés). Si le virage est trop brusque, la voiture sortira de la piste. Allumez la voiture et placez le milieu du module de capteur de suivi face à la piste noire, puis la voiture se déplacera le long de la piste noire
Préparez une piste noire (la largeur de la piste noire est supérieure à 30 mm et inférieure à 60 mm) sur fond blanc. Veuillez noter que l’angle de braquage ((courbe de flexion) de la voie ne peut pas être deux aigus (plus de 90 degrés). Si le virage est trop brusque, la voiture sortira de la piste. Allumez la voiture et placez le milieu du module de capteur de suivi face à la piste noire, puis la voiture se déplacera le long de la piste noire























































