Dans ce projet, nous utilisons deux capteurs photorésistants pour concevoir une voiture robot suiveuse de lumière simple. À l’aide d’une lampe de poche pour briller sur les modules de résistance photo, la voiture robot suivra la lumière pour avancer, tourner la lumière ou tourner à gauche comme un chat mignon joue avec la lumière. Les modules photorésistants sont constitués de capteurs à l’avant de la voiture; Vous pouvez le programmer pour suivre la lumière plus forte.
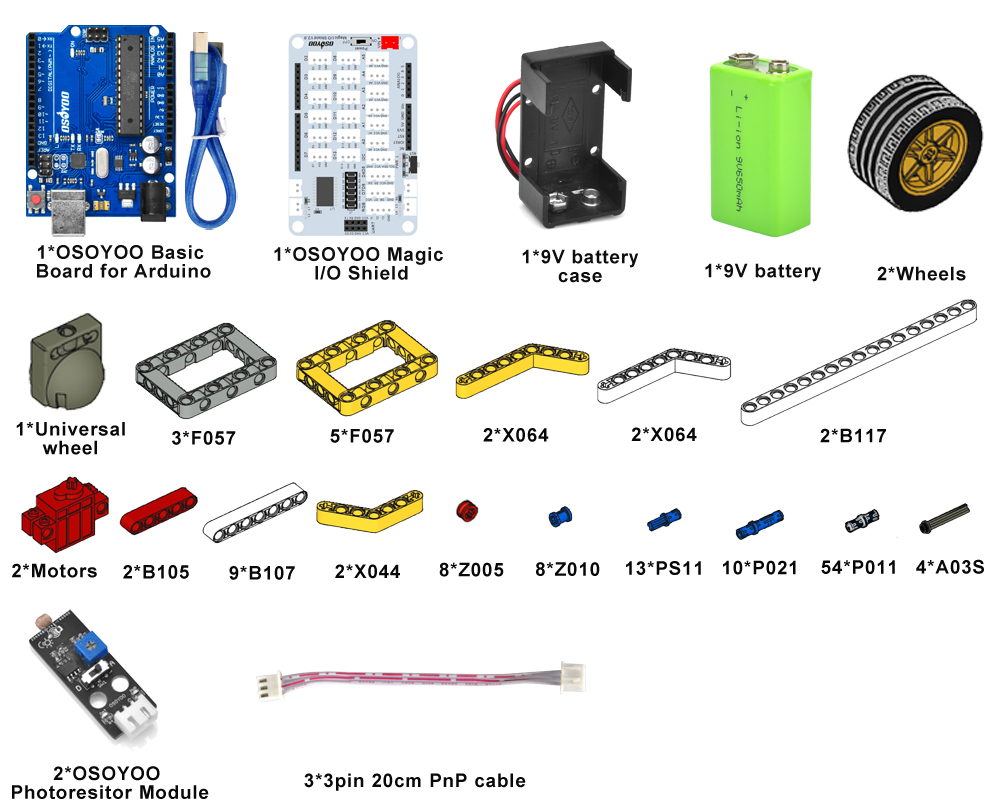
Veuillez préparer les parties suivantes pour mener à bien ce projet REMARQUE:
1.La couleur du bloc de construction est soumise au produit réel, ce qui n’affecte pas l’utilisation.
2. TOUS LES PRODUITS OSOYOO POUR ARDUINO SONT DES CARTES TIERCES ENTIÈREMENT COMPATIBLES AVEC ARDUINO
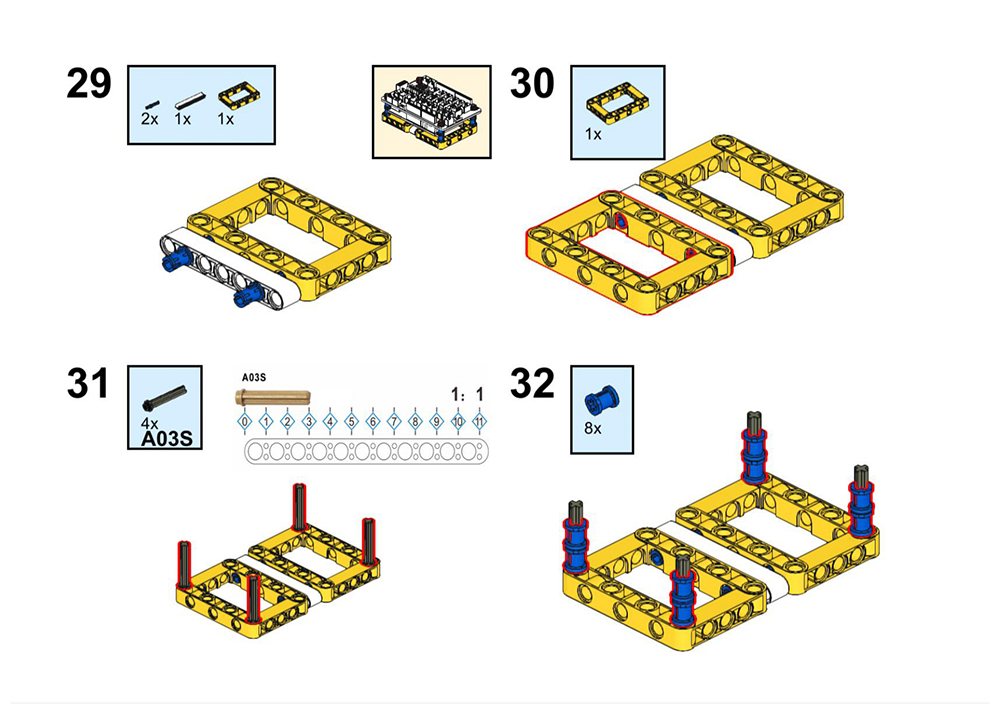
Avant de construire le robot avec des blocs, veuillez installer la carte de base OSOYOO pour Arduino sous le shield OSOYOO Magic I/O comme suit(Attention s’il vous plaît : les broches du shield d’E/S sont alignées avec le port de base de la carte d’abord, puis appuyez fermement sur le shield sur la carte).
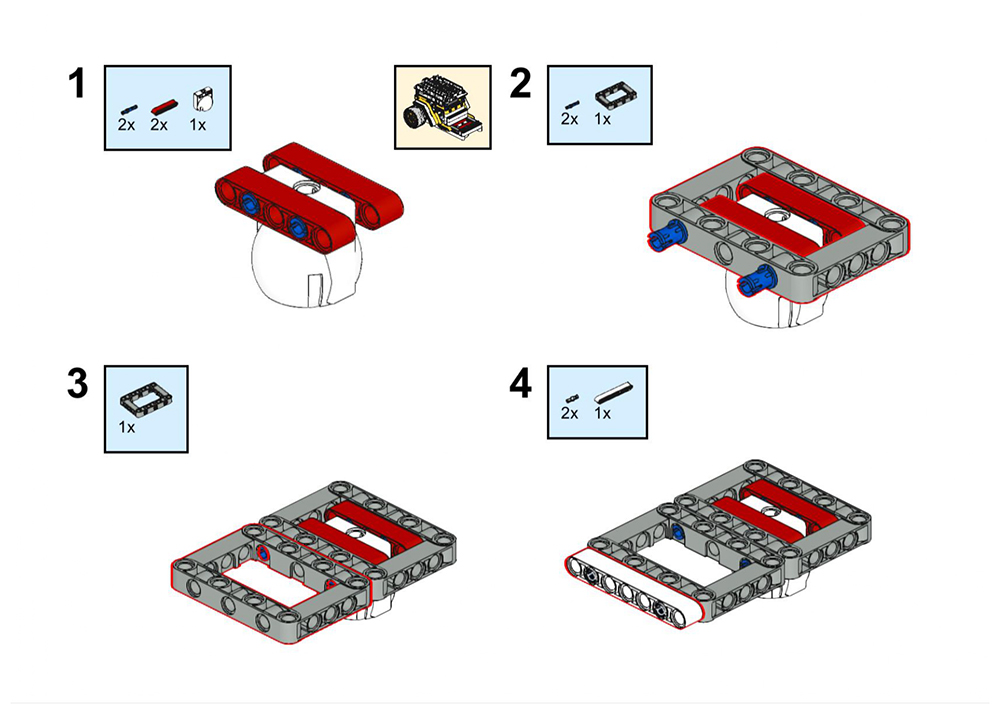
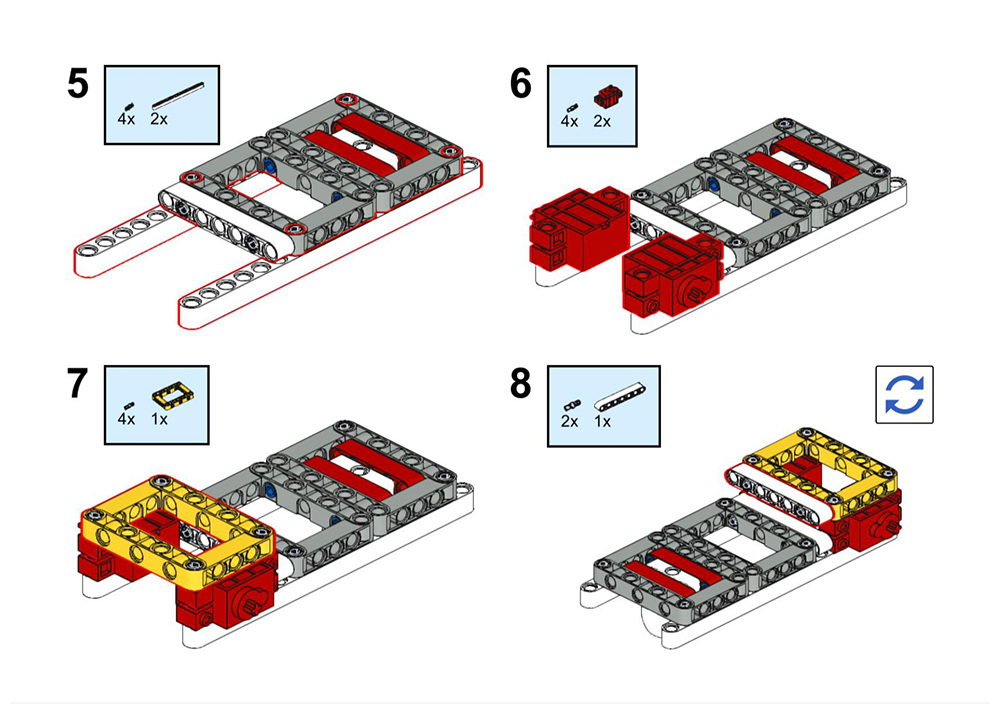
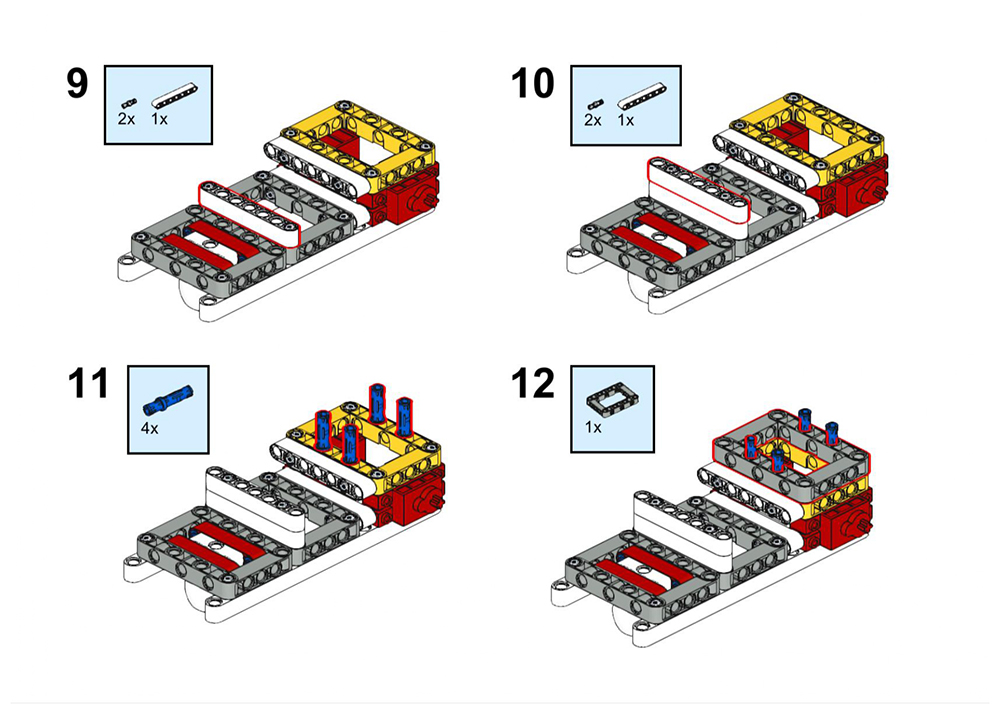
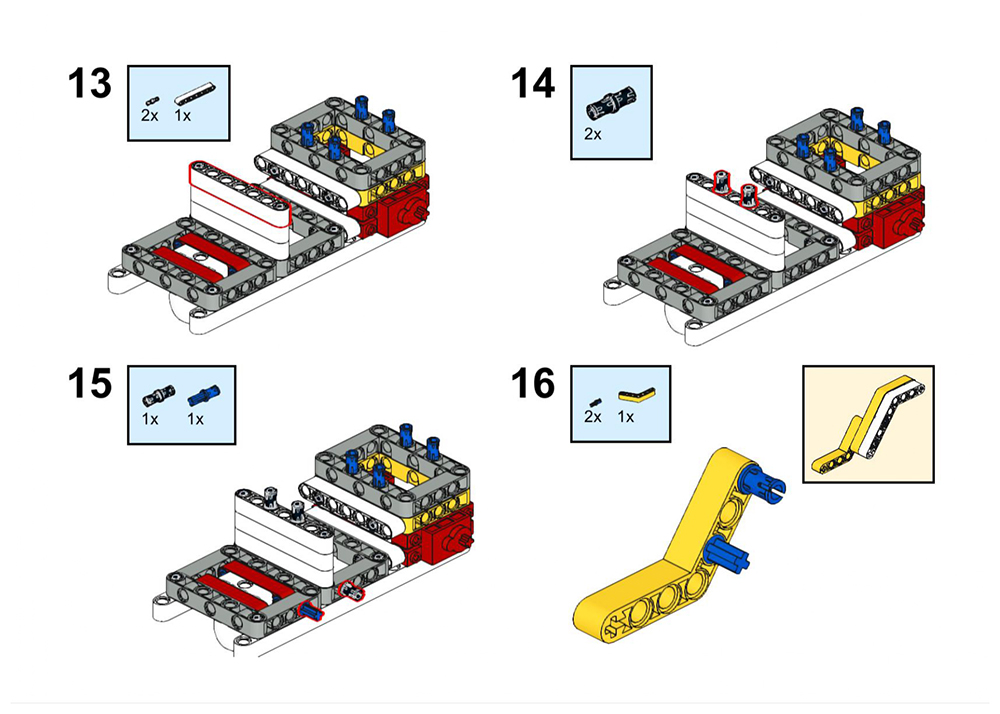
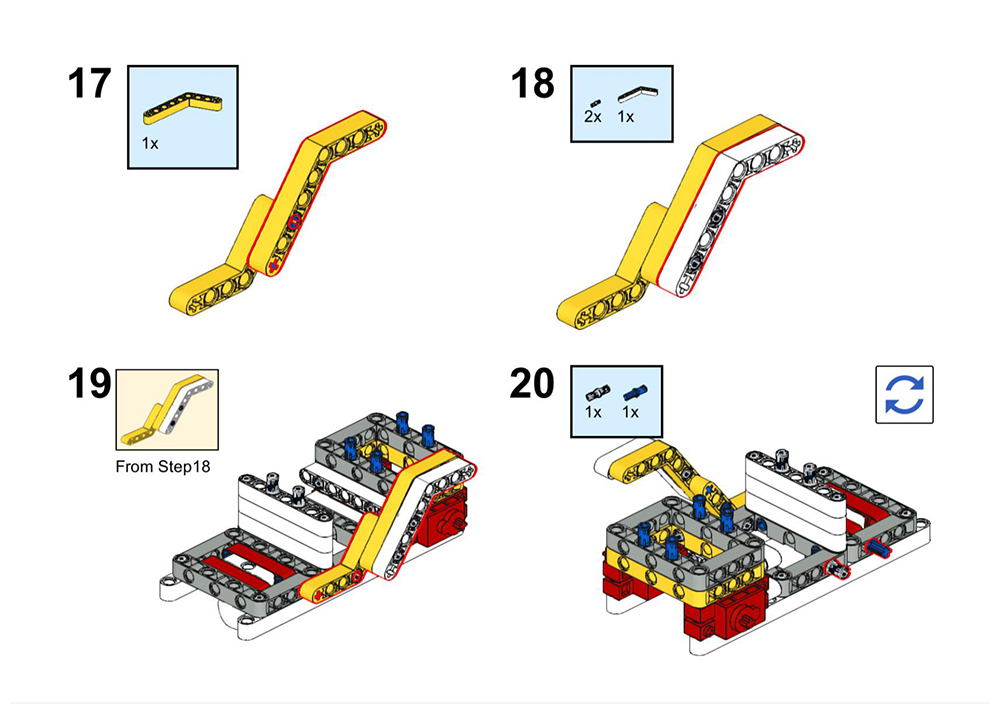
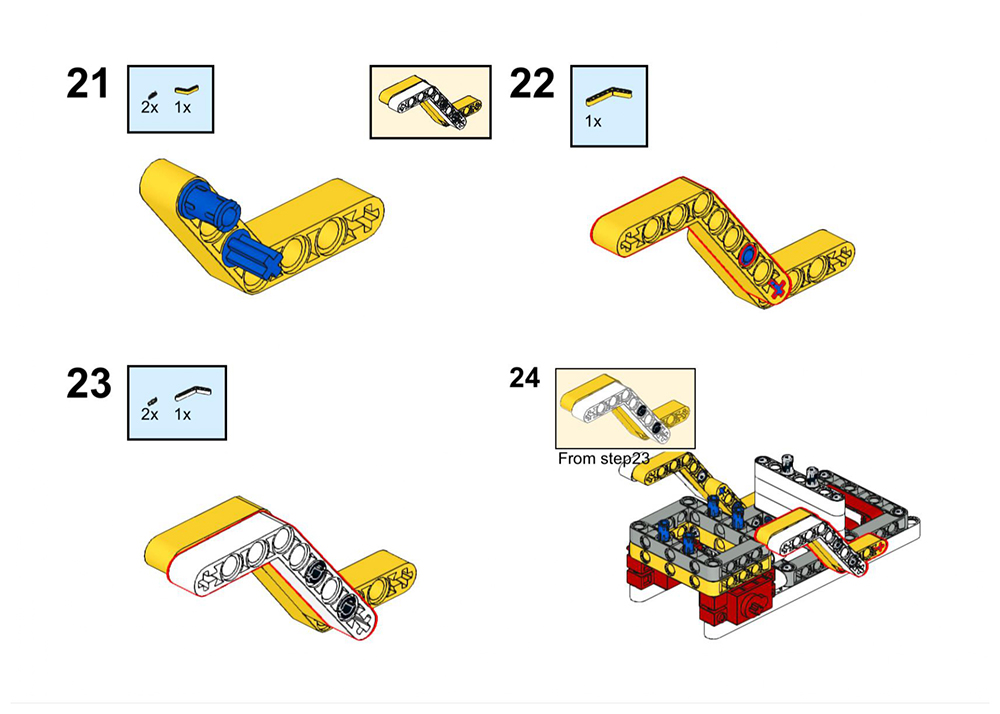
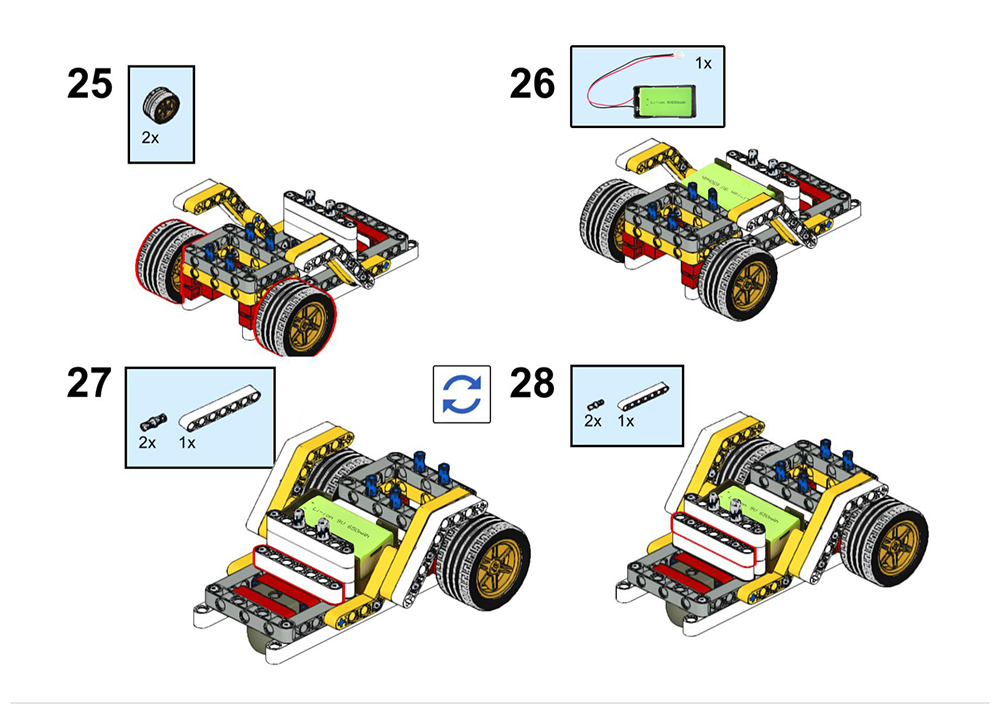
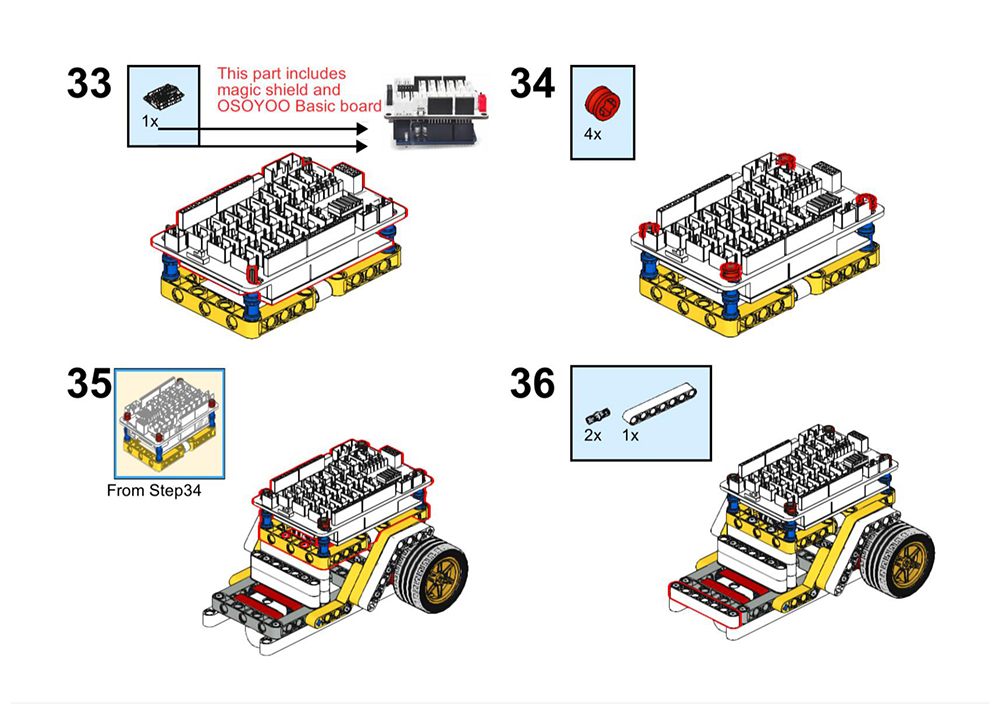
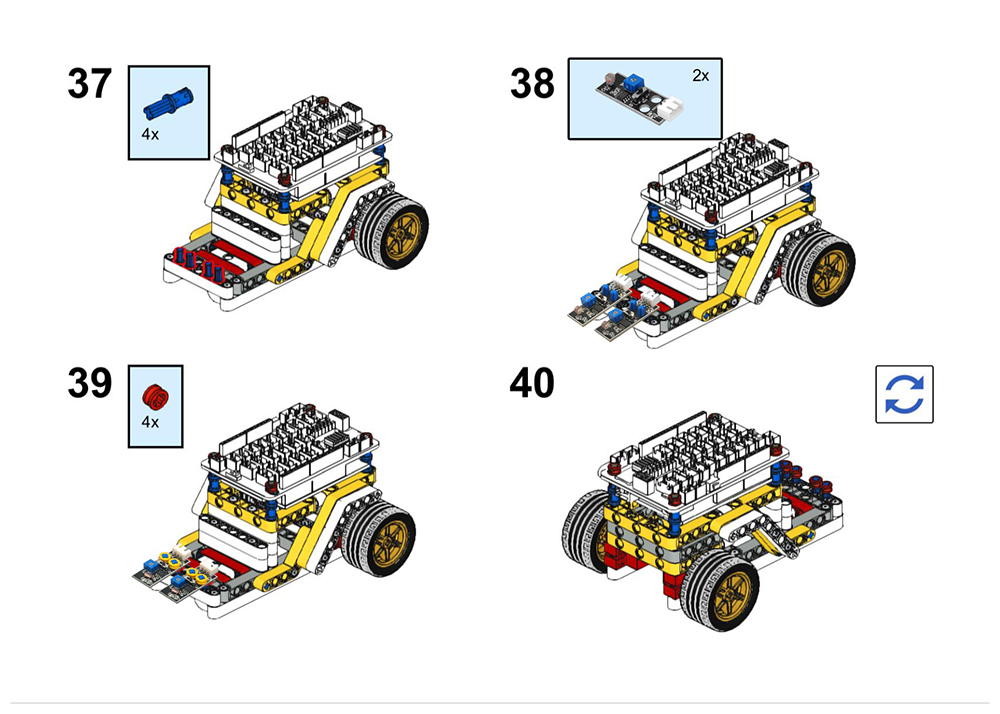
Veuillez suivre les étapes de construction pour construire cette voiture robot, Si vous souhaitez obtenir des étapes de construction PDF claires, veuillez télécharger à partir de https://osoyoo.com/picture/Building_Robot_Car/lesson3/LESSON3.pdf
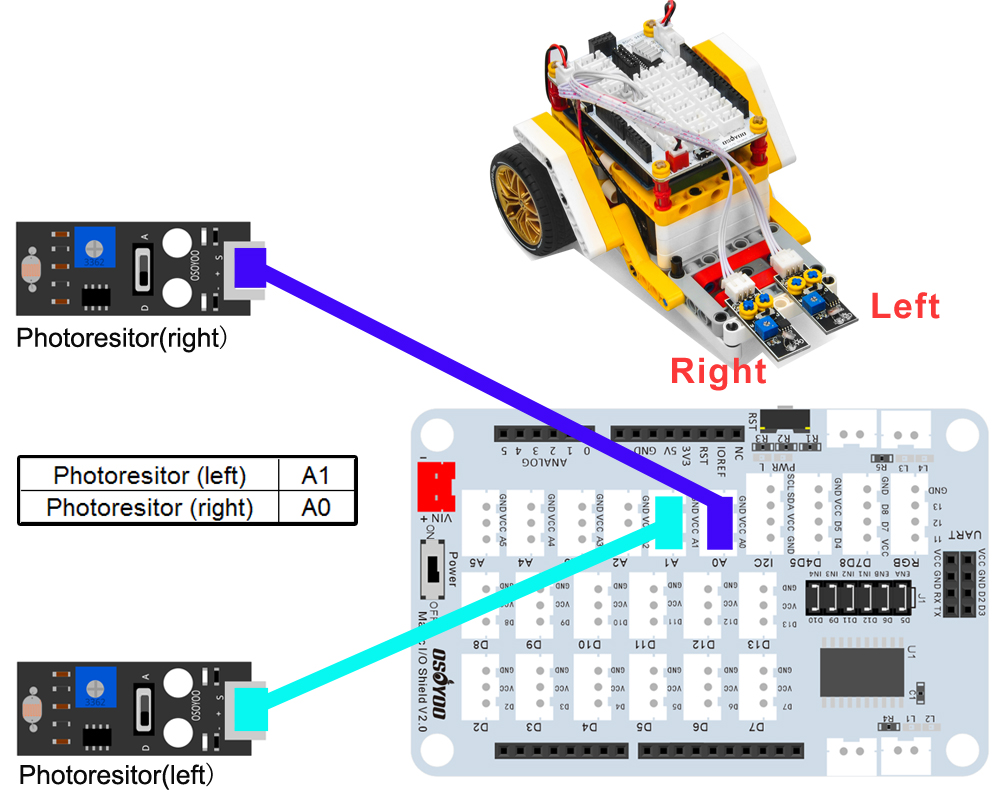
Veuillez connecter les moteurs et le boîtier de la batterie 9V comme leçon1. Ensuite, connectez la photorésistance gauche à A1 du shiel Magic I/O, à droite au port A0 avec des câbles PNP à 3 broches comme ci-dessous (Attention s’il vous plaît: il y a six capuchons de cavalier sur ENA / ENB / IN1 / IN2 / IN3 / IN4):
Remarque: Dans ce kit, nous utilisons mblock comme outil de programmation, si vous voulez en savoir plus sur mblock, veuillez visiter la préparation avant la classe 1: https://osoyoo.com/2021/12/01/preparation-before-class-1
Étape 1) Téléchargez la version PC de mBlock à partir de https://mblock.makeblock.com/en-us/download/, sélectionnez le fichier de téléchargement selon le type de système d’exploitation de votre ordinateur (veuillez ne pas utiliser la version du navigateur): Étape 2) Téléchargez le fichier de périphérique OSOYOO_UNO.mext à partir de https://osoyoo.com/driver/mblock/osoyoo_uno.mext
Étape 3) Exécutez le logiciel mBlock PC en double-cliquant sur la belle icône Panda. vous verrez mBlock UI comme image suivante. Veuillez supprimer l’appareil par défaut CyberPi en cliquant sur la croix dans le cercle rouge.
Étape 4) Faites glisser et déposez osoyoo_uno_mext fichier (téléchargé à l’étape 2) vers le logiciel mBlock comme suit:
Maintenant, vous verrez un nouveau firmware de périphérique dans mBlock, voir l’image suivante: Maintenant,
le logiciel mBlock et OSOYOO_UNO firmware de l’appareil ont été installés avec succès sur notre PC!
Maintenant, nous allons vous montrer comment utiliser des blocs pour transformer l’idée ci-dessus en réalité.
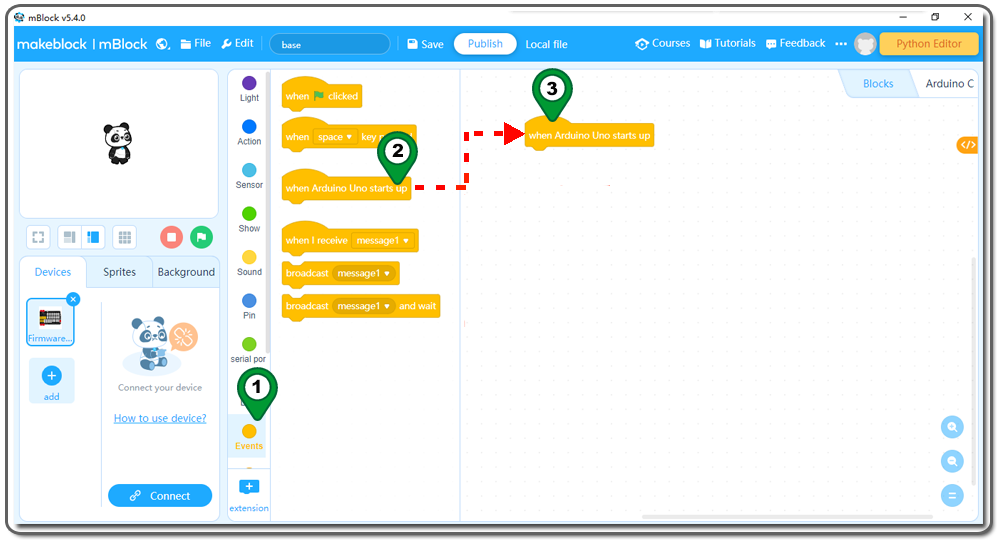
Étape 5) Cliquez sur Events, ajoutez le bloc when Arduino Uno starts up en haut :
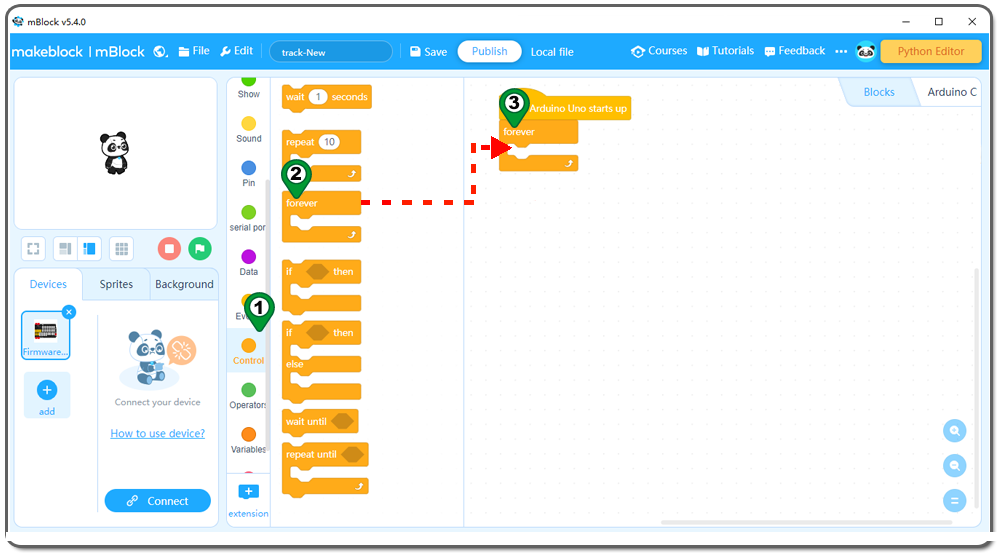
Étape 6) : Cliquez sur Control, puis faites glisser et déposez le bloc Forever dans la zone de programmation comme suit :
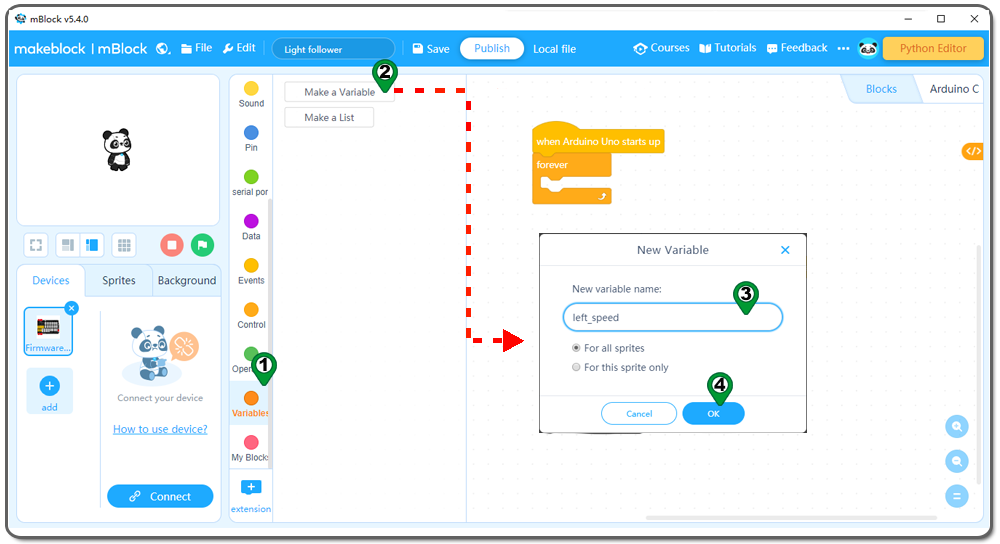
Étape 7) : Cliquez sur Variable, puis sur Make a Variable ,Une nouvelle boîte de dialogue s’ouvre, écrivez “left_speed” ,puis cliquez sur OK, vous aurez une nouvelle variable “left_speed” ;Utilisez la même méthode pour créer une variable “right_speed” ;
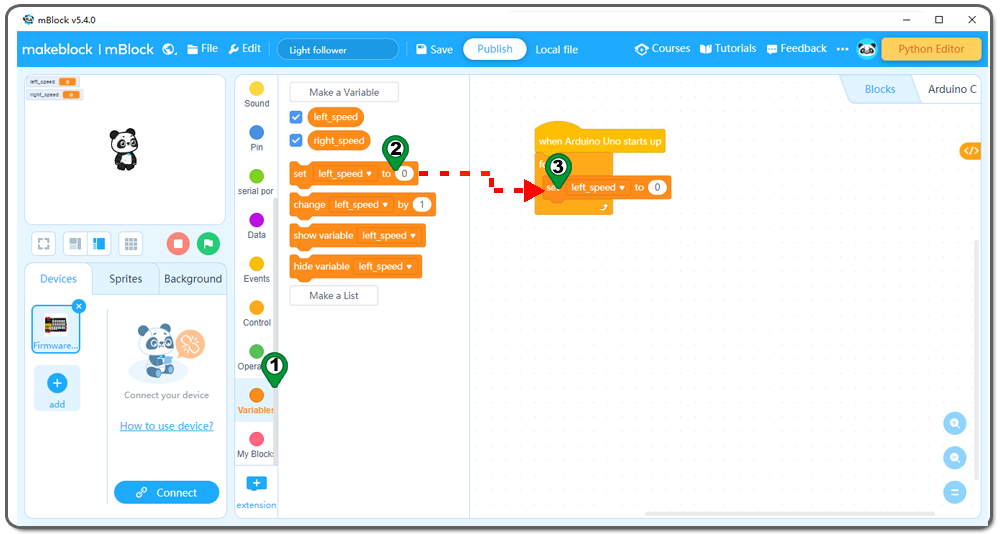
Étape 8) : Cliquez à nouveau sur Variable, puis faites glisser et déposez le bloc set left_speed to dans la zone de programmation comme suit :
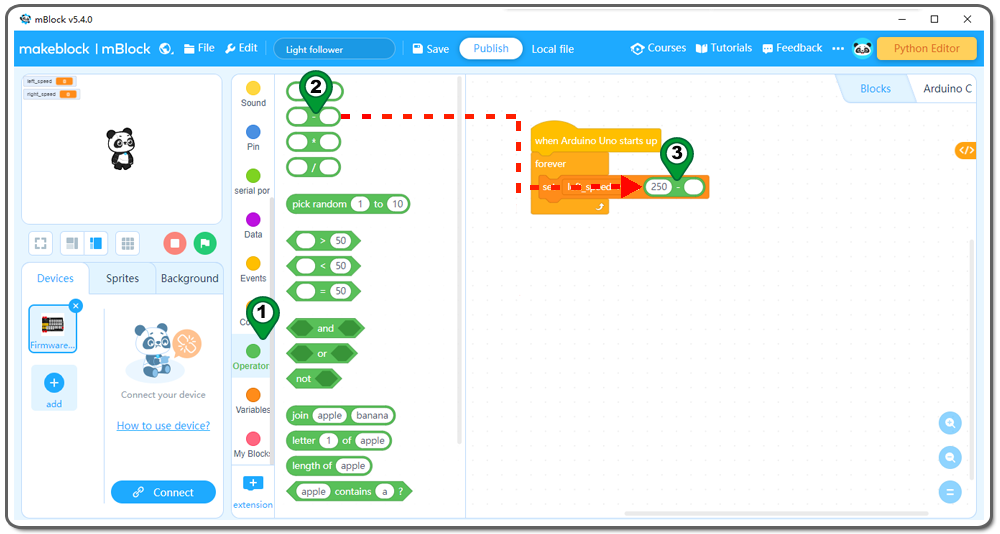
Etape 9):Cliquer sur Operation, puis glisser-déposer le bloc 0-0 dans la zone de programmation, écrire 250 dans la première zone comme suit;
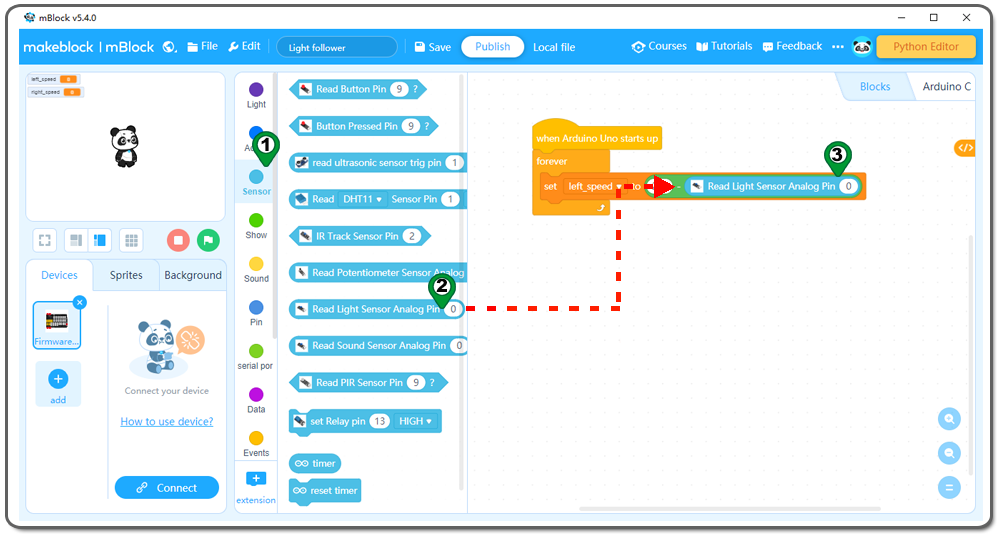
Etape 10) : Cliquer sur Sensor, puis glisser et déposer le bloc Read Light Sensor Analog Pin dans la zone de programmation comme suit;
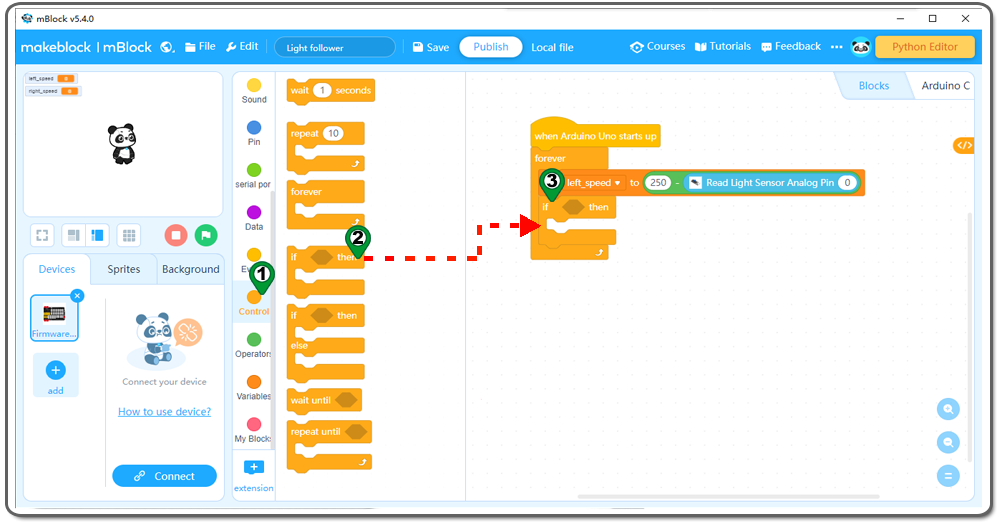
Étape 11) : Cliquez sur Control, ajoutez un bloc if then à l’intérieur de la boucle forever comme suit :
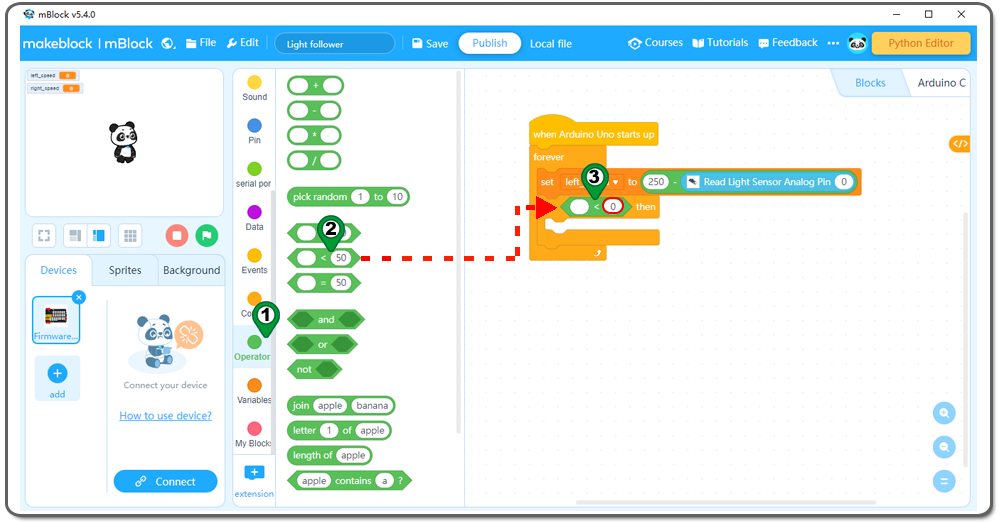
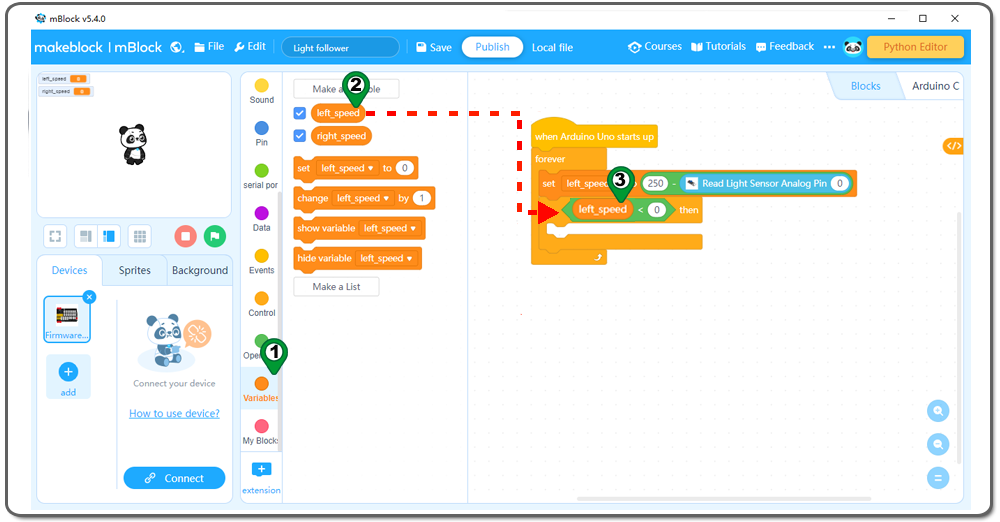
Etape 12) : Cliquer sur Operation, puis glisser-déposer le bloc 0<0 dans la zone de programmation, écrire 0 dans la deuxième zone comme suit;
Étape 13) : Cliquez sur Variable, puis faites glisser et déposez le bloc left_speed dans la zone de programmation comme suit :
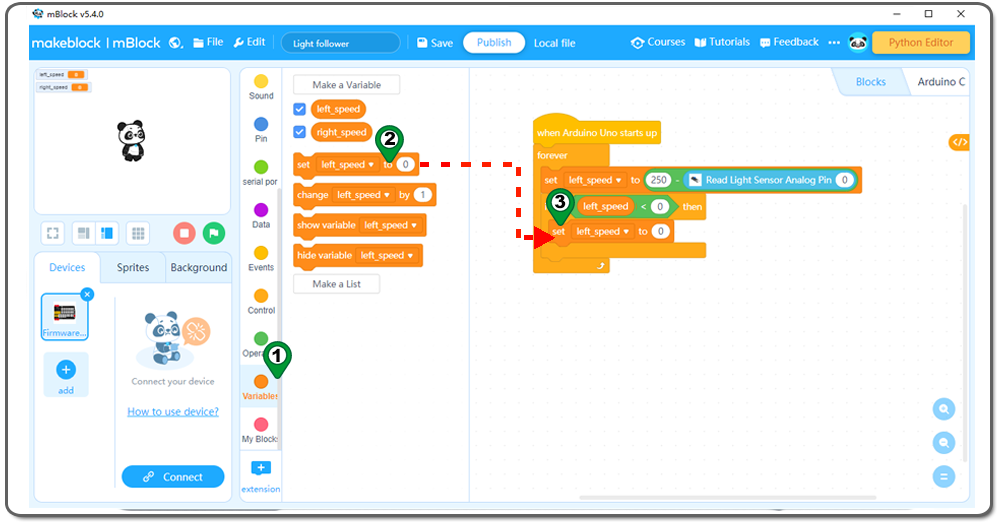
Étape 14) : Cliquez à nouveau sur Variable, puis faites glisser et déposez le bloc set left_speed to dans la zone de programmation comme suit :
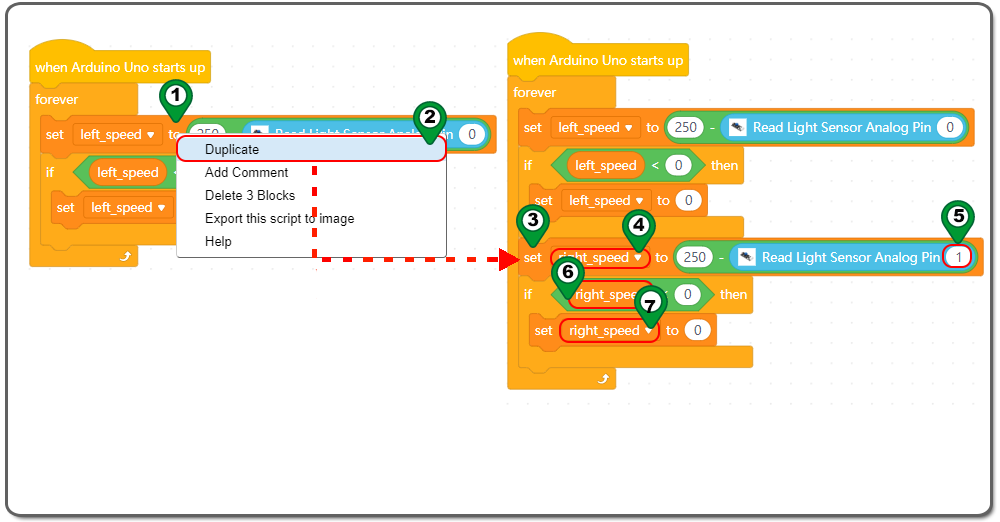
Etape 15) : Cliquez avec le bouton droit de la souris sur le bloc set left_speed to , puis glissez et déposez ce bloc derrière le bloc if then , modifiez la “left_speed ” en “right_speed” comme suit :
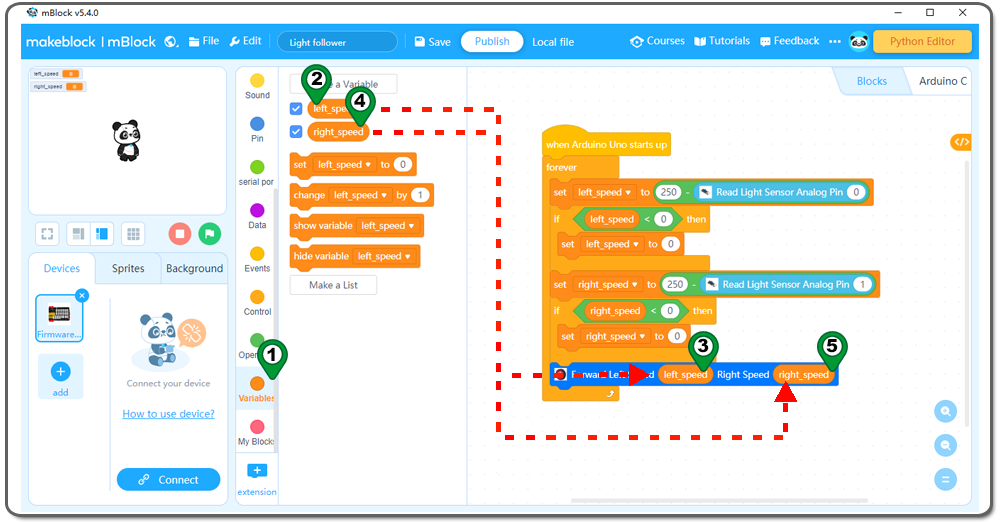
Étape 16 ): Cliquez à nouveau sur Action , puis faites glisser et déposez le bloc Forward Left Speed 100 Right Speed 100 dans la zone de programmation comme suit :
Étape 17):Cliquez sur Variable, puis sur le bloc left_speed et le bloc right_speed pour accéder à la zone de programmation comme suit :
Nous avons maintenant terminé la programmation des blocs. Les blocs finaux ressemblent à ce qui suit :
Tous les blocs de programmation sont maintenant terminés ! D’après l’image ci-dessus, la logique est assez simple :
Lorsque l’Arduino est démarré, l’ordinateur entre dans une boucle morte qui vérifie l’état du bouton, lorsque le bouton n’est pas pressé, le servo s’arrête à sa position d’origine (dans mon servo 0 degré) et l’ascenseur est au sol, lorsque le bouton est pressé, le bras du servo tourne de la position 0 degré à la position 180 degrés et l’ascenseur s’élève dans les airs.
Étape 18) Téléchargez le programme sur la carte de base OSOYOO
1) Veuillez d’abord connecter votre carte de base OSOYOO à votre PC avec un câble USB. Cliquez ensuite sur le bouton Connecter en bas du logiciel mBlock, vous verrez une fenêtre USB apparaître,
2) sélectionnez la case à cocher Show all connectable device, puis un menu déroulant de périphérique apparaîtra,
3)sélectionnez votre port dans le menu déroulant du périphérique
4) cliquez sur le bouton Connect pour connecter votre PC à la carte de base OSOYOO.
5)Une fois que votre PC est connecté à la carte de base OSOYOO, veuillez cliquer sur le bouton Télécharger en bas de votre logiciel, puis le code sera téléchargé sur la carte de base OSOYOO:
Dans les leçons 1 et 2 précédentes, nous avons appris quelques blocs de programme de contrôle et d’action de base. Dans cette leçon, nous allons apprendre quelques nouveaux blocs de programme: i) Read Light Sensor de Analog Pin Bloc de la catégorie Sensor
Ce bloc est de forme ovale, ce qui signifie qu’il renvoie une valeur numérique comprise entre 0 et 255. Le chiffre zéro dans la partie droite signifie que le capteur lit la valeur de la lumière sur la broche A0 (capteur de lumière gauche).
ii) Bloc Minus calculation de la catégorie Operator
Le bloc ci-dessus calcule le résultat de 250 moins la valeur du capteur A0.
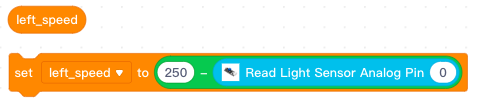
iii) Bloc Variable et bloc Set Variable to dans la catégorie Variable :
Le bloc Variable est souvent défini pour enregistrer un résultat de calcul en vue d’une utilisation ultérieure.
Le bloc ci-dessus définit un bloc variable “left_speed”, puis fixe sa valeur au calcul de 250 moins la valeur de retour du capteur de lumière A0. Si la valeur de la lumière est plus élevée, la vitesse_de_gauche est plus petite, et la voiture tournera donc à gauche.
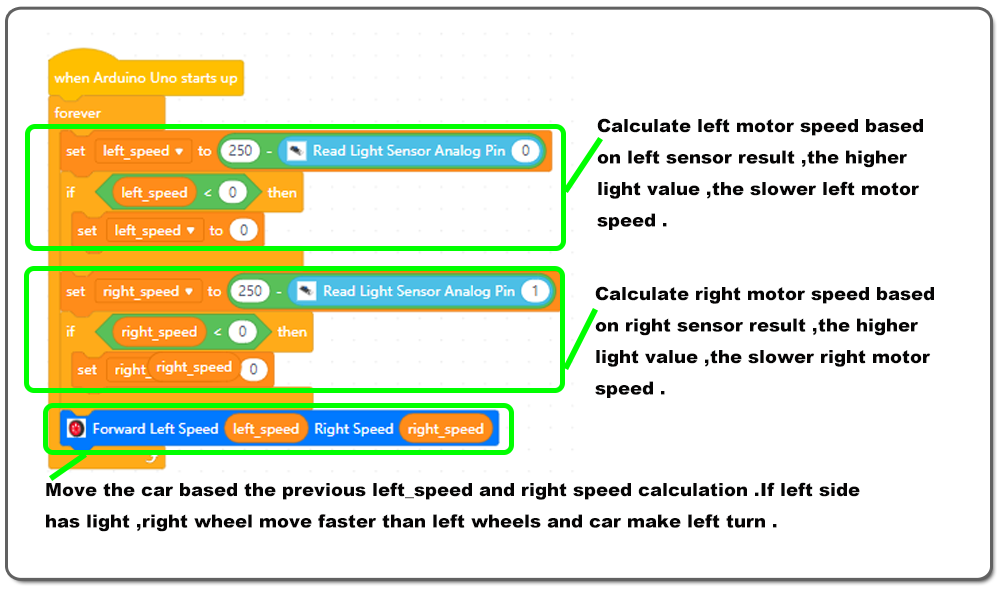
Voici l’explication du bloc de programme complet :
Le principe de fonctionnement de la photorésistance est le suivant : plus la lumière détectée par la photorésistance est forte, plus la valeur de la lecture de la photorésistance est faible. La valeur de la lecture de la photorésistance est supérieure à 0.
Dans le programme, nous définissons la vitesse du moteur gauche comme une variable de left_speed, la vitesse du moteur droit comme une variable de right_speed. La vitesse du moteur est comprise entre 0 et 255.
La variable left_speed est égale à 250 moins la valeur de la photorésistance gauche (A0), et la variable right_speed est égale à 250 moins la valeur de la photorésistance droite (A1). Si les variables sont inférieures à 0, le programme fixe ces variables à 0。
Si la valeur du capteur gauche (A0) est inférieure à 250, le moteur gauche avance ;
Si la valeur de la lecture du capteur gauche (A0) est supérieure à 250, le moteur gauche s’arrête ;
Si la valeur du capteur droit (A1) est inférieure à 250, le moteur droit avance ;
Si la valeur du capteur droit (A1) est supérieure à 250, le moteur droit s’arrête ;
Si la valeur de la lecture des deux capteurs est inférieure à 250, les deux moteurs avancent.
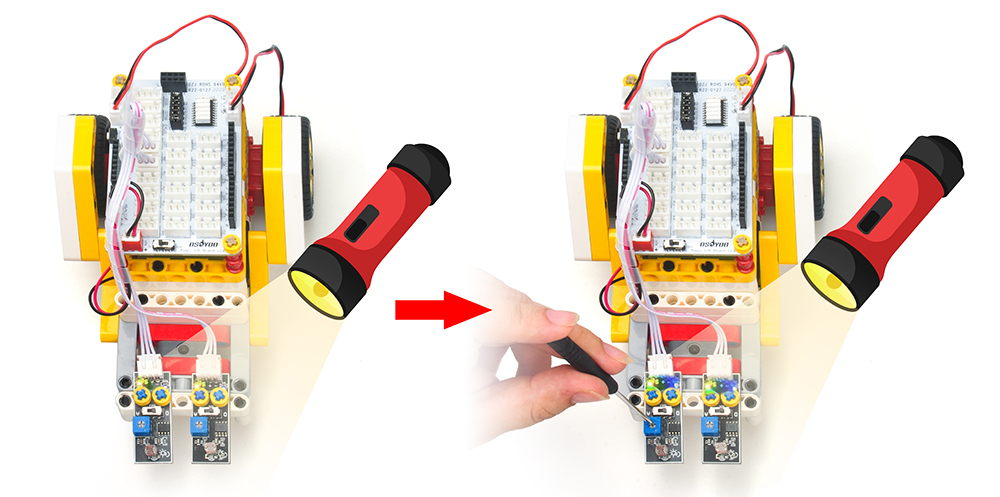
Téléchargez le code de croquis followlight.ino sur Arduino. Allumez la voiture.
Illuminez le capteur de photorésistance avant avec une lampe de poche. Ensuite, la voiture suivra la lampe de poche pour faire du mouvement.
Si la torche brille sur le capteur de photorésistance, mais que la voiture ne bouge pas. Veuillez ajuster le réglage comme indiqué sur l’image. Dans des circonstances normales, la lumière jaune et la lumière bleue seront allumées en même temps lorsque la torche est allumée.