Cette leçon utilisera l’outil de programmation —— IDE pour Arduino pour compléter le contrôle de la voiture robot par WIFI APP. Dans cette leçon, la voiture est contrôlée par téléphone APP pour avancer, reculer, tourner à droite et à gauche et ouvrir le servo du doigt pour attraper l’objet et décharger l’objet.
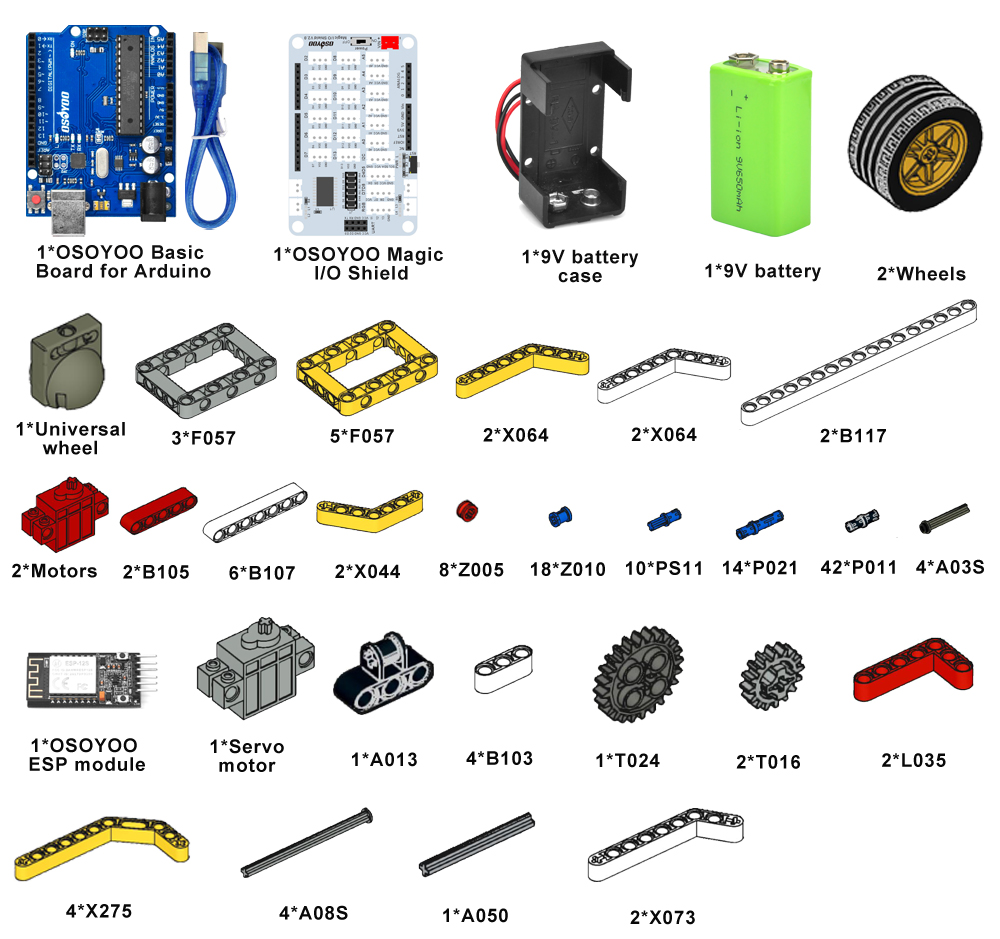
Veuillez préparer les parties suivantes pour mener à bien ce projet
REMARQUE: 1.la couleur du bloc de construction est soumise au produit réel, ce qui n’affecte pas l’utilisation. deux. TOUS LES PRODUITS OSOYOO POUR ARDUINO SONT DES CARTES TIERCES ENTIÈREMENT COMPATIBLES AVEC ARDUINO
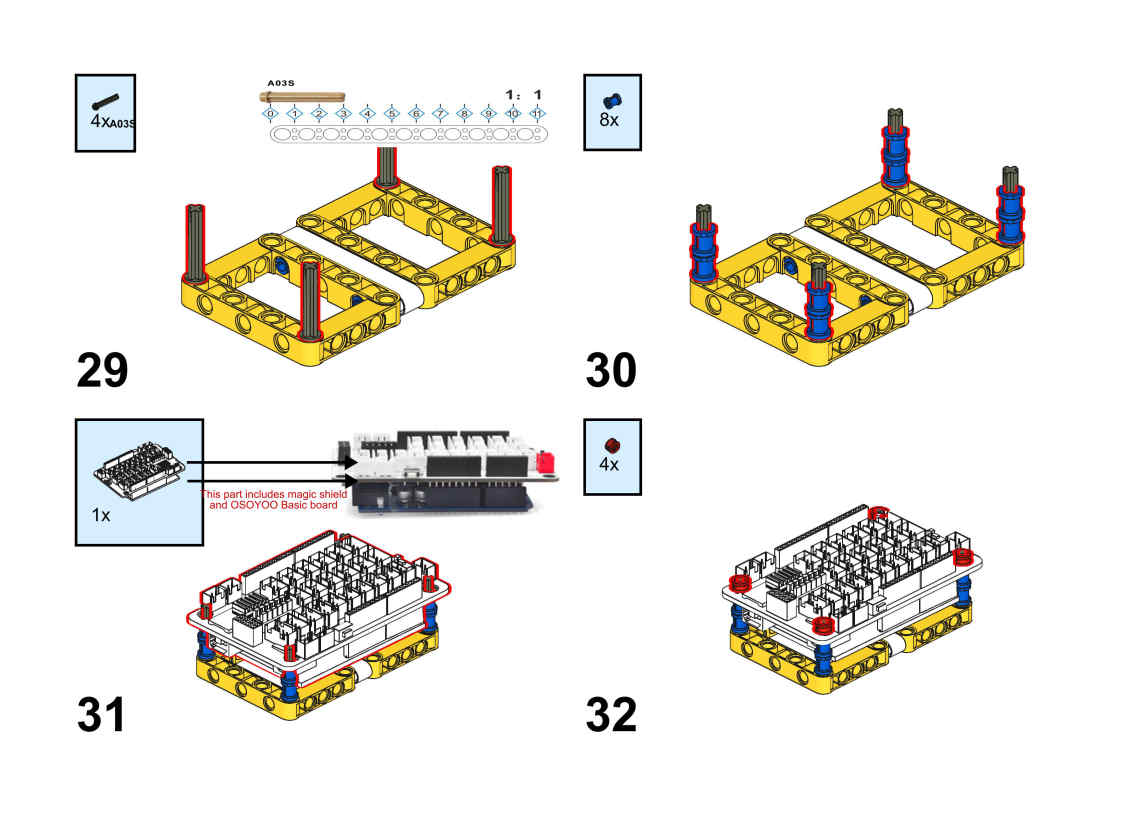
Avant de construire le robot avec des blocs, veuillez installer [OSOYOO basic board] pour Arduino sous [OSOYOO Magic I/O shield] comme suit (Attention s’il vous plaît : les broches de [I/O shield] sont alignées avec le port de base de la carte d’abord, puis appuyez fermement sur le shield sur la carte).
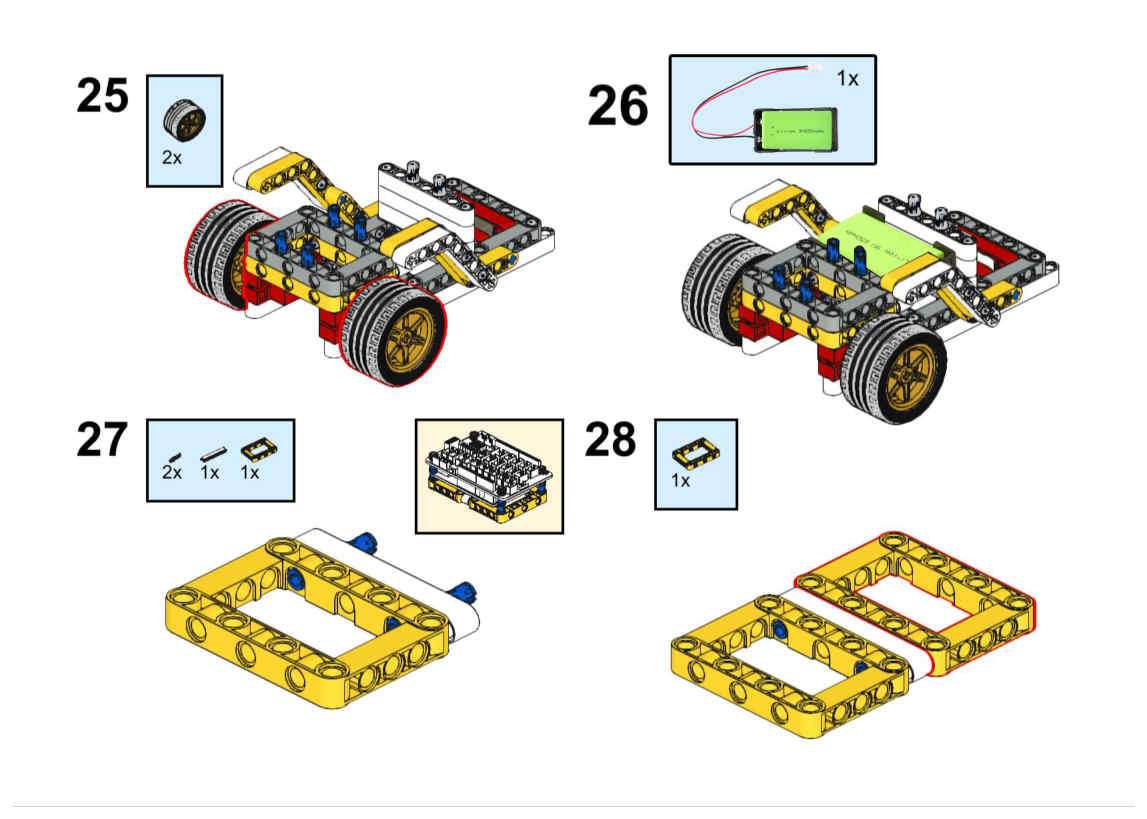
Veuillez connecter les moteurs et le boîtier de la batterie 9V comme leçon1.
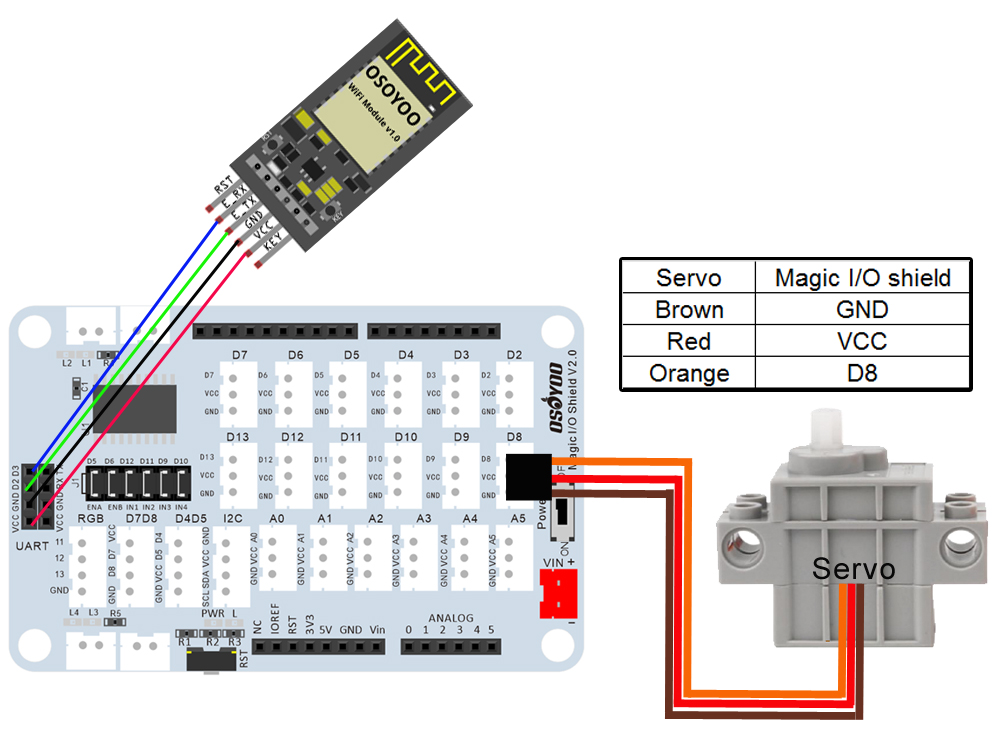
Connectez ensuite les quatre broches centrales du [OSOYOO WIFI Module] à l’emplacement VCC/GDN/D2/D3 du [Magic I/O shield], connectez le servomoteur au port D8 comme suit (Attention : il y a six cavaliers sur ENA/ENB/IN1/IN2/IN3/IN4)
Remarque: Cette leçon utilise Arduino IDE comme outil de programmation.
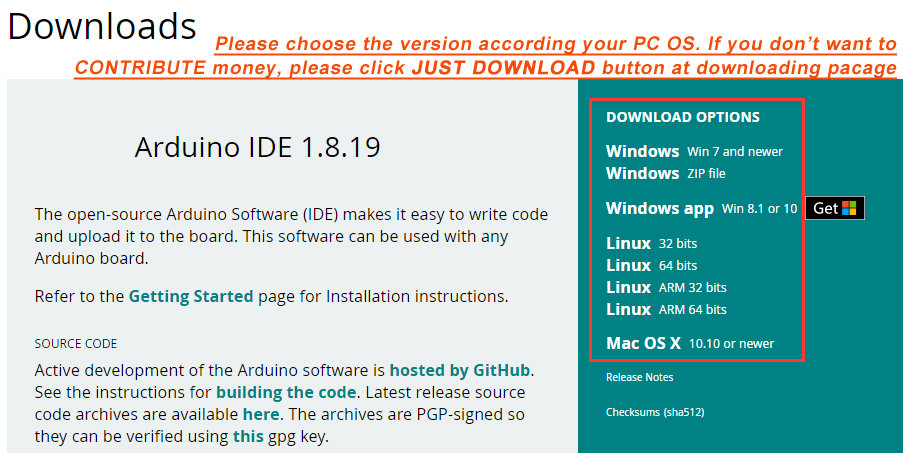
Étape 1 : Installez Arduino IDE. Téléchargez Arduino IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en , puis installez le logiciel. Si vous avez installé Arduino IDE, veuillez ignorer cette étape.
Étape 2 : Installez [WifiEsp-master library] dans IDE (Si vous avez déjà installé la bibliothèque [WifiEsp-master], veuillez ignorer cette étape)
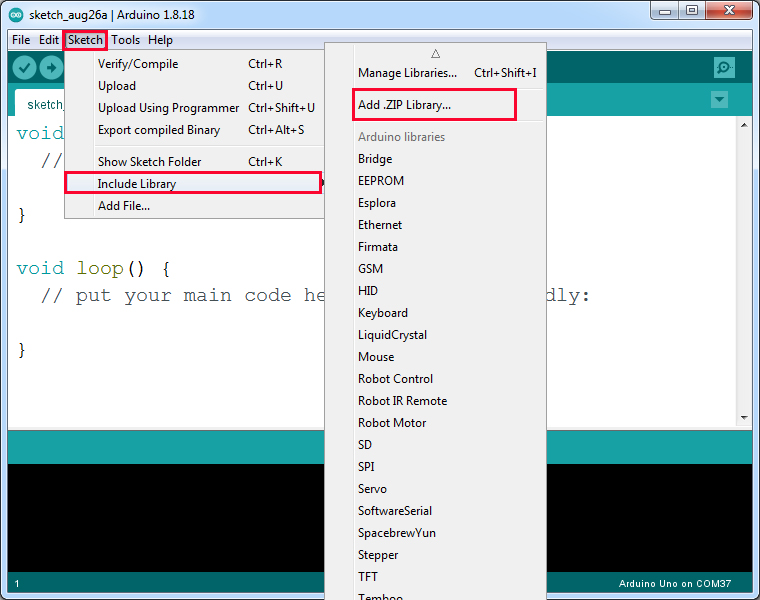
Téléchargez [WifiEsp-master library] depuis https://osoyoo.com/driver/WiFiEsp-master.zip, puis importez la bibliothèque dans IDE (Ouvrez IDE-> cliquez sur [Sketch]-> [Include Library]-> [Add .Zip Library])
Étape 3 : Installez [OsoyooIOT Library] dans IDE (Si vous avez déjà installé OsoyooIOT Library, veuillez ignorer cette étape)
Téléchargez [OsoyooIOT Library] à partir de https://osoyoo.com/driver/wifi-iot/OsoyooIOT.zip, puis importez la bibliothèque dans IDE( Ouvrez IDE-> cliquez sur [Sketch]-> [Include Library] ->[Add .Zip Library])
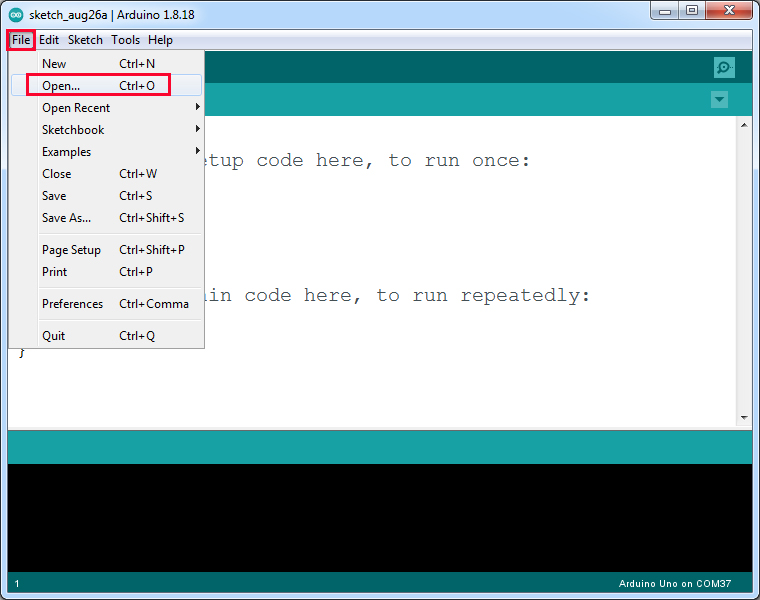
Etape 5 : Connecter la [OSOYOO basic board] pour Arduino au PC avec un câble USB, ouvrir l’IDE Arduino -> cliquer sur [file] -> cliquer sur [Open] -> choisir le code “robot-arm-car.ino” dans le dossier robot-arm-car, charger le code dans l’arduino. (Remarque : Veuillez éteindre l’alimentation lorsque votre robot est connecté à un ordinateur personnel ou portable via un câble USB).
Étape 6 : Vous devez changer le code Line 35 et Line 36 comme nom et mot de passe ssid wifi de votre routeur :
char ssid[] = “***”; // remplacez *** par votre routeur wifi SSID (nom) char pass[] = “***”; // remplacez *** par votre routeur wifi SSID (mot de passe)
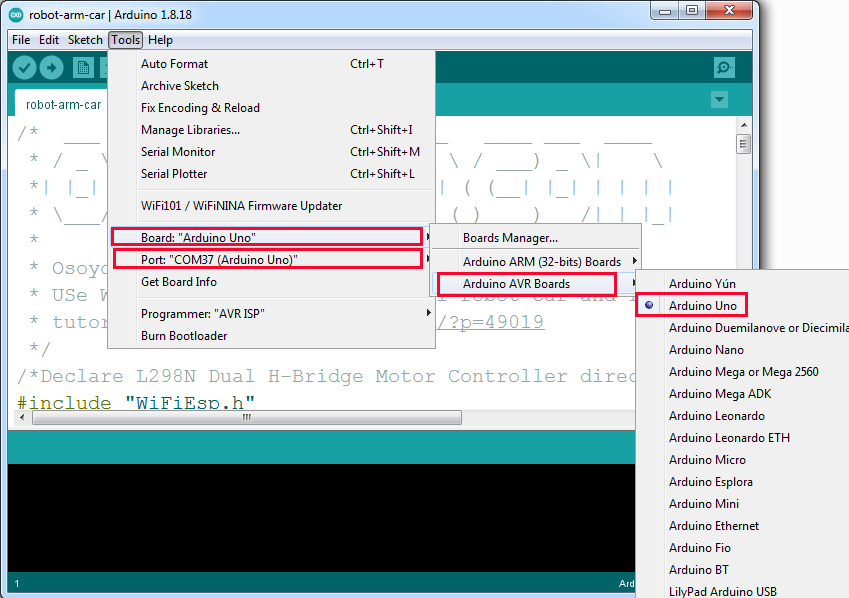
Étape 7 : Choisissez la carte et le port correspondants à votre projet, téléchargez l’esquisse sur le tableau.
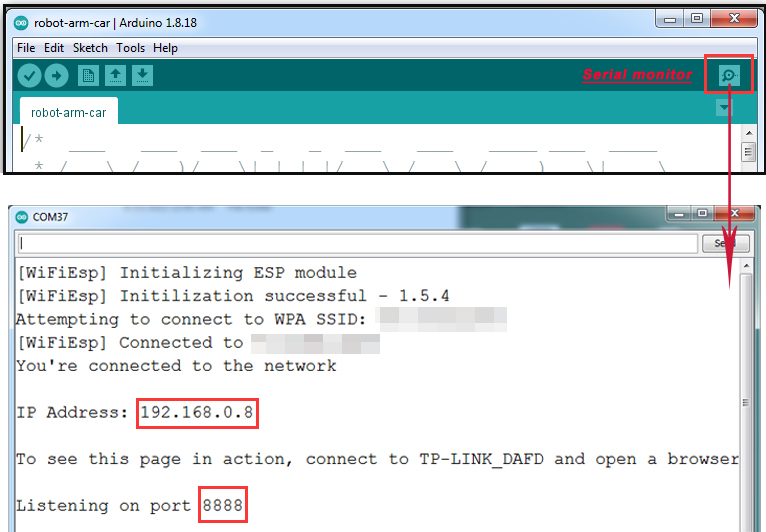
Étape 8: cliquez sur la fenêtre Moniteur série dans le coin supérieur droit de l’IDE, vous verrez le résultat suivant (Remarque: votre PC et le robot sont connectés au même réseau LAN):
CONSEILS:
Si vous trouvez que la vitesse de la voiture est lente ou rapide, veuillez ouvrir le code et changer la valeur de line31 à line33 comme suit:
Installation et configuration de l’application: Étape 1) Téléchargez [OSOYOO Iot udp APP] en recherchant [OSOYOO Iot udp APP] depuis Apple Store (iPhone / iPad) ou Google Play Store (appareil Android).(Note : Si vous ne trouvez pas cette APP dans Google Play, vous pouvez directement télécharger l’APP à partir du lien suivant : https://osoyoo.com/driver/udp-app.apk)
Étape 2): Installez le [OSOYOO Iot udp APP] dans votre téléphone et assurez-vous que votre téléphone portable est connecté au même réseau LAN de votre voiture robot pour Arduino.
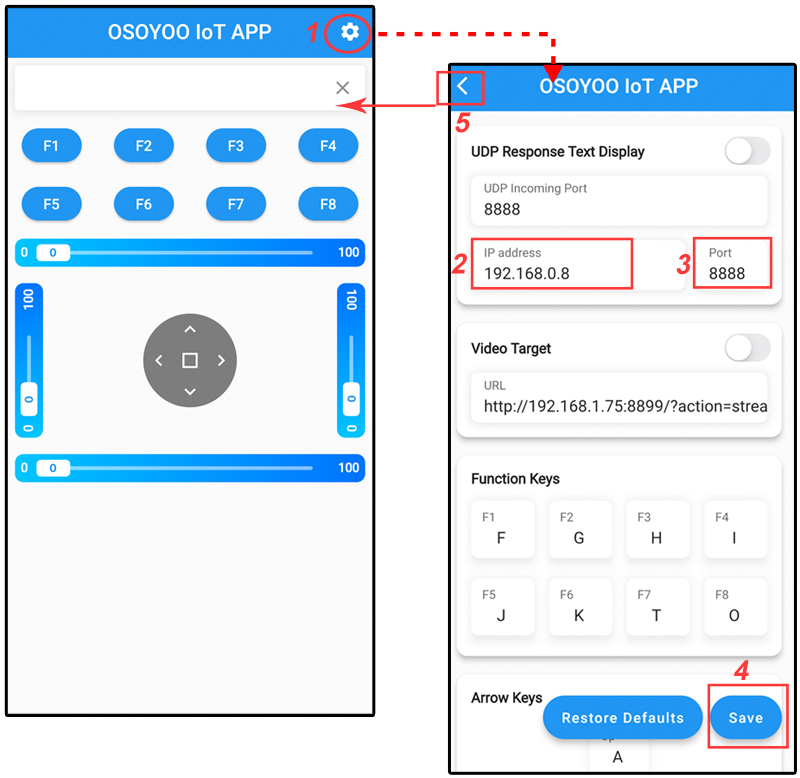
Étape 3): Définir l’adresse IP dans APP 1) Ouvrez APP, cliquez sur le bouton Réglage dans le coin supérieur droit
2) Utilisez l’adresse IP que vous obtenez dans la fenêtre du moniteur série (pour notre robot est 192.168.0.8) pour remplacer l’adresse IP par défaut 192.168.1.255
3) conservez le numéro de port par défaut 8888 sans changer
4) Cliquez sur le bouton [Save] pour enregistrer les modifications que vous venez d’apporter
5) Cliquez sur la flèche de retour pour revenir à l’interface utilisateur avant de l’application
Vous pouvez utiliser les touches fléchées pour contrôler le mouvement de la voiture. Action du bouton APP




















)