Dans cette leçon, nous allons vous apprendre à utiliser une application mobile pour contrôler une voiture robot via le protocole UDP. Le Raspberry Pi exécutera un programme Python pour obtenir un paquet UDP de l’APP.
Vous apprendrez à utiliser Python pour obtenir des données distantes (paquet UDP) à partir d’une application mobile.
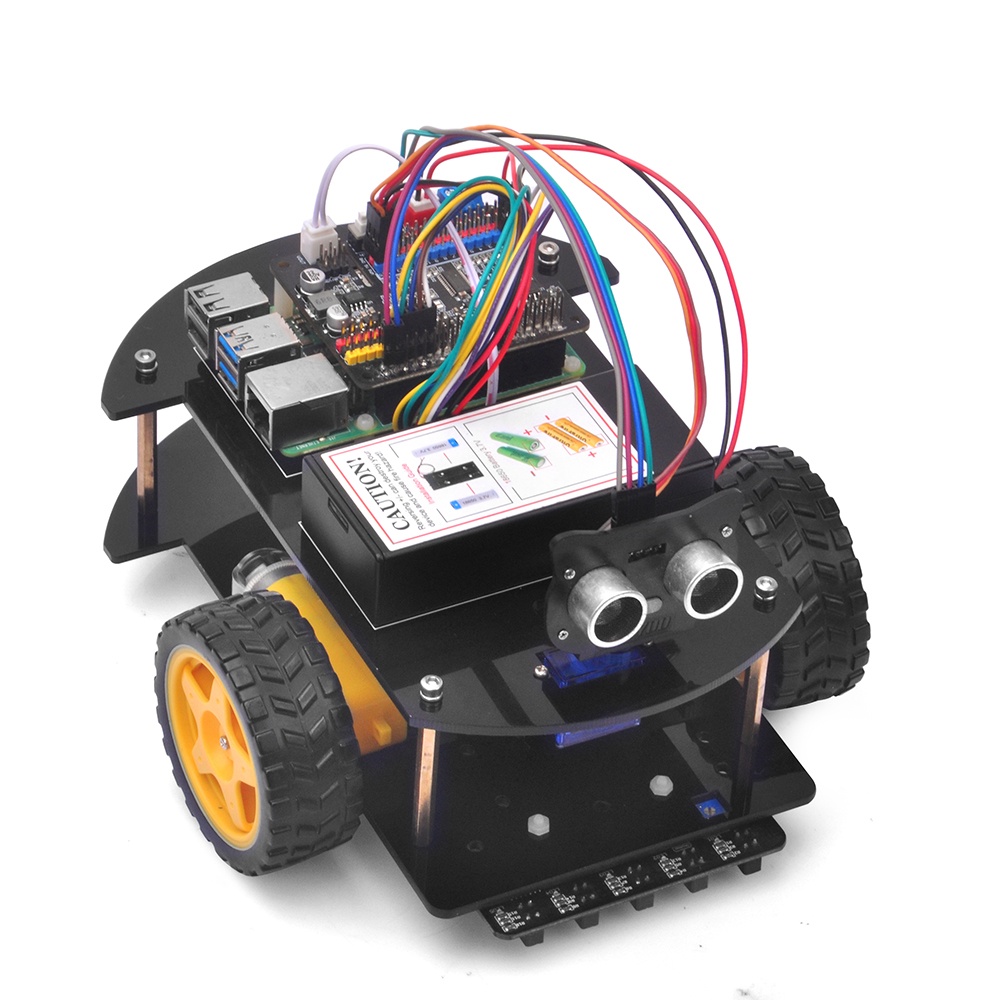
Étape 1 : Installez le cadre de base de la voiture intelligente conformément à la leçon 3. Si vous n’installez pas le module de capteur de suivi, veuillez terminer l’installation dans la leçon 2.
Étape 1) Assurez-vous d’avoir installé rpi.gpio et la bibliothèque adafruit-pca9685, et activez I2C dans la leçon 1.
Étape 2) Allumez la voiture robot et tapez la commande suivante pour télécharger l’exemple de code :
Étape 3) Tapez la commande suivante pour exécuter l’exemple de code :
python picar-udp-control4.py
Une fois que le python ci-dessus est en cours d’exécution, votre voiture attend la commande de votre téléphone portable.
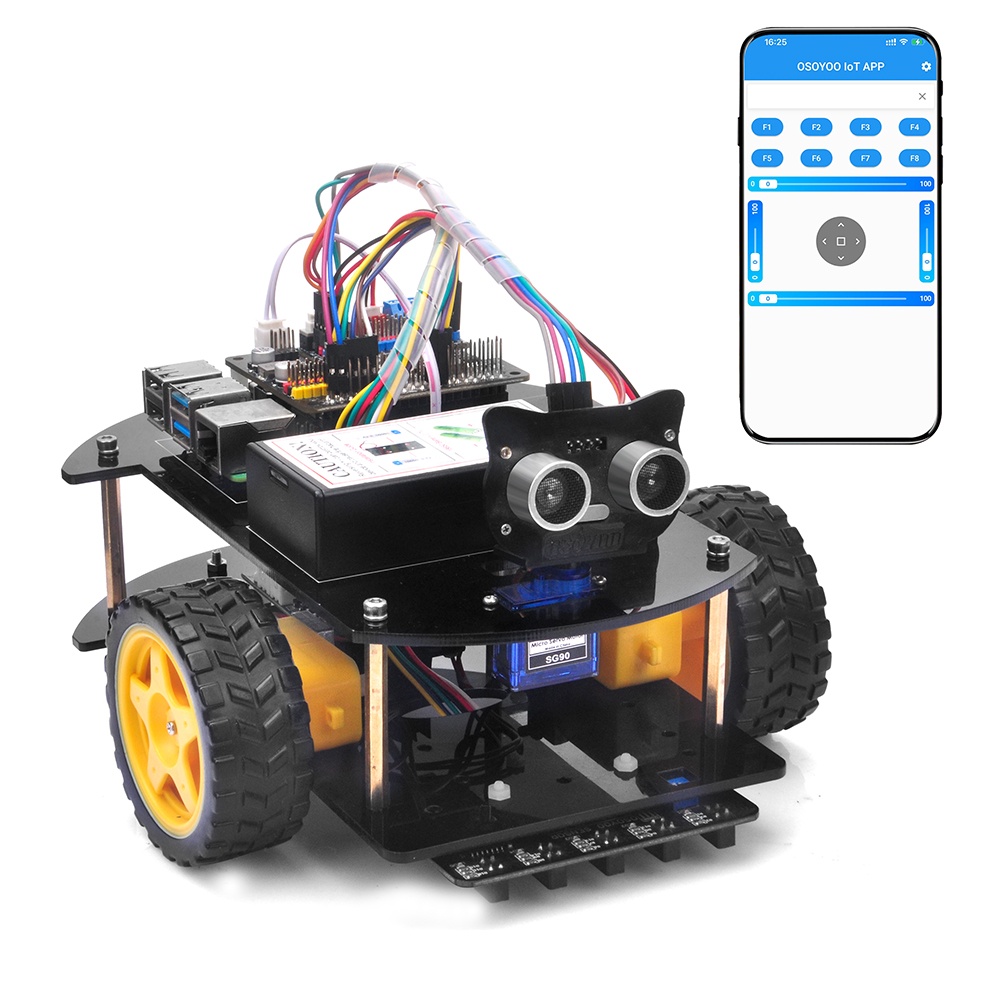
Étape 4) Télécharger OSOYOO Wi-Fi UDP Robot Car control APP Dans Google Play ou Apple Store, veuillez rechercher les mots-clés « OSOYOO IoT UDP Robot APP», vous trouverez une icône rouge APP comme suit (Note : Si vous ne trouvez pas cette APP dans Google Play, vous pouvez directement télécharger l’APP à partir du lien suivant : https://osoyoo.com/driver/udp-app.apk):
Étape 5) Connectez votre téléphone au même routeur Wi-Fi SSID que celui utilisé par le Raspberry Pi. Ouvrez l’APP, cliquez sur “settings icon(1)” pour entrer dans l’interface de configuration, entrez votre [Raspberry Pi IP address] et [Port] à [8888], cliquez sur [Save], puis cliquez sur back icon(5) pour revenir à l’interface de contrôle comme suit :
Étape 6)
Maintenant, mettez la voiture sur le sol, et vous pouvez cliquer sur les touches de direction < > ^ v pour faire bouger la voiture. Utilisation || touche pause pour arrêter le mouvement de la voiture.
Si vous cliquez sur Touche d’obstacle (F8), la voiture effectuera une conduite automatique d’évitement d’obstacles similaire à la leçon 3
Si vous cliquez sur Touche de suivi (F7), la voiture effectuera un suivi de liaison de conduite automatique similaire à la leçon 2
Remarque: F1 ~ F6 sont d’autres fonctions de développement à l’avenir.
FAQ sur l’application IoT UDP et le code sketch :
Q1)Comment régler la vitesse de la voiture robotisée? R: Si vous souhaitez modifier les performances de vitesse de la voiture robotisée, veuillez modifier les valeurs suivantes dans les paramètres de la ligne 19-21 dans picar-udp-control.py fichier:
high_speed = 4000 # Max pulse length out of 4096
mid_speed = 2000 # Max pulse length out of 4096
low_speed = 1000 # Max pulse length out of 4096
Q 2)Que s’est-il passé lorsque vous appuyez sur des boutons dans OSOYOO IoT UDP Robot APP ? R: Lorsque vous appuyez sur un bouton de l’APP, l’APP enverra un message d’une seule lettre via le protocole UDP à l’appareil cible Raspberry Pi
Bouton
Message UDP
F1
/
F2
/
F3
/
F4
/
F5
/
F6
/
▲
Avance
▼
Précédent
►
Droite
◄
Gauche
carré
Arrêter
F7
Pistage
F8
obstacle
Q3)Comment le programme python Raspberry Pi gère-t-il la commande UDP?
Ligne 290 à 318 tandis que la boucle reçoit les données UDP de l’APP et les donne à des cur_status viables, la fonction ticker dans la ligne 266 – 280 gère le cur_status :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Par exemple, lorsque la touche APP ▲ est enfoncée, cur_status valeur est A, puis la fonction ticker() appelle la fonction forward(mid_speed,mid_speed) pour faire avancer la voiture.