Il existe de nombreuses façons de contrôler Raspberry Pi Robot Car sur Internet. Dans ce projet, nous introduisons une méthode populaire, qui consiste à installer un serveur Web sur Raspberry Pi. En d’autres termes, nous pouvons transformer notre carte Pi en site Web et utiliser la navigation ou l’application de téléphone portable pour échanger des données avec Raspberry Pi.
Non.
Image
Appareil
Qté.
Accessoires
Lien
1
Module de capteur de suivi
1
M2.5 Vis en plastique x 2
M2.5 Écrou en plastique x2
M2.5 Pilier en plastique x 2
Étape 1 : Installez le cadre de base de la voiture intelligente conformément à la leçon 2. Si vous avez terminé la leçon 3, vous pouvez simplement la conserver.
Étape 1) Assurez-vous d’avoir installé la bibliothèque rpi.gpio et adafruit-pca9685, d’activer I2C dans la leçon 1, et d’allumer la voiture robotisée.
Étape 2) Téléchargez le fichier de script shell d’installation en tapant la commande suivante:
Après avoir exécuté les commandes ci-dessus, vous allez installer la bibliothèque python Flask et créer automatiquement un répertoire appelé pi-webserver et deux sous-répertoires sous pi-webserver qui sont static et templates, la structure est la suivante:
Le répertoire pi-webserver stockera notre fichier de code python, le répertoire statique stockera le fichier CSS et le dossier templates stockera les fichiers HTML. Si vous ne savez pas ce qu’est HTML, fichier CSS, cela n’a pas d’importance.
Étape 7) Exécutez le code en tapant la commande suivante :
sudo python ~/pi-webserver/pi-webserver.py
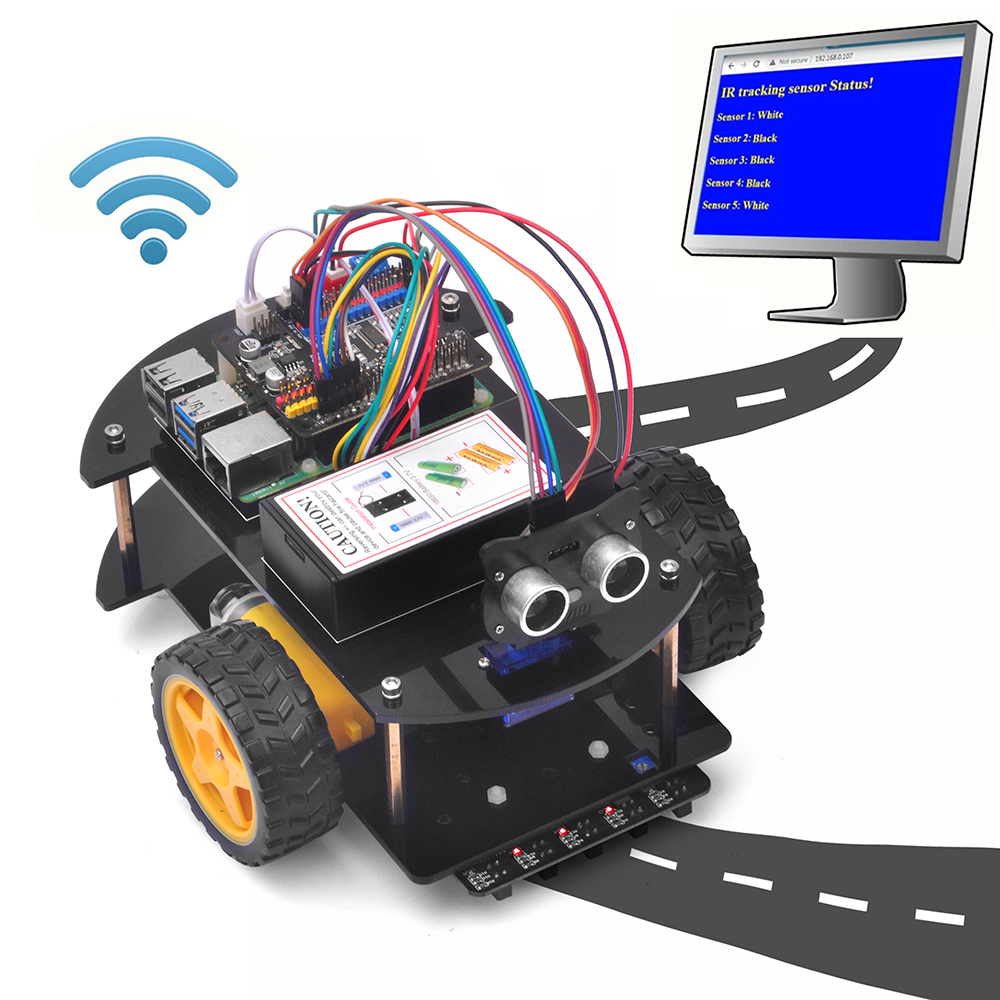
Étape 8) Votre serveur web python flask va démarrer. Maintenant, dans votre PC ou téléphone portable qui est le même réseau Wi-Fi que votre Raspberry Pi, ouvrez le navigateur et visitez http://your_raspberry_pi_ip_address:5000 (dans mon cas http://192.168.0.107:5000), vous verrez l’état de vos 5 capteurs de suivi dans votre navigateur:
L’état du capteur sera mis à jour toutes les 5 secondes, donc si vous mettez la ligne noire sous d’autres capteurs, la valeur du capteur dans la page Web ci-dessus changera après 5 secondes.