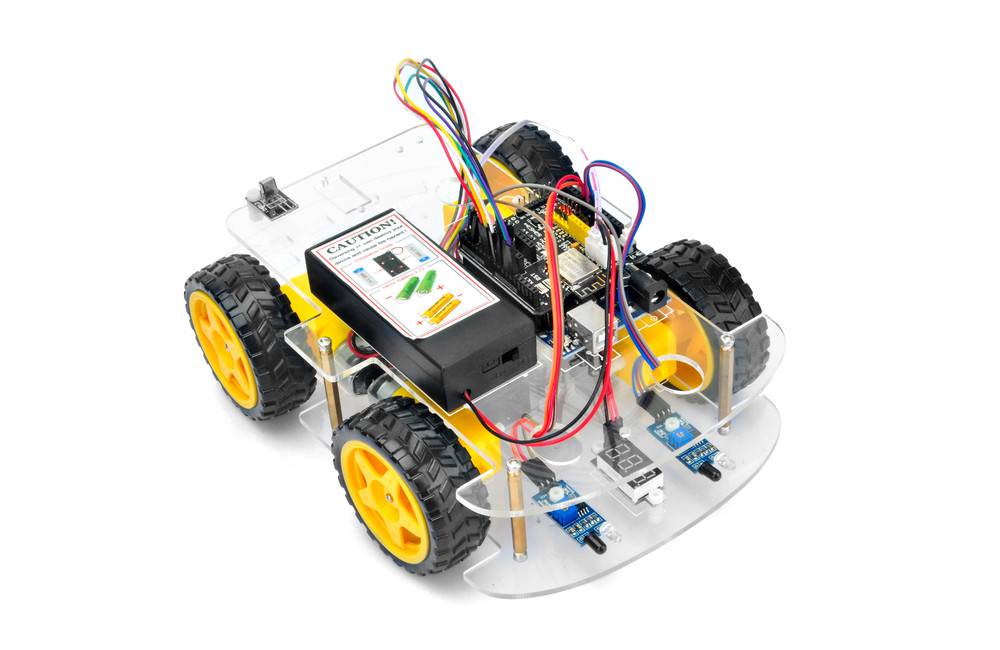
In questa lezione, installeremo 2 sensori di distanza IR sull’auto robot e programmeremo l’auto per seguire i movimenti degli oggetti. Il principio di questo esperimento si basa sul principio del rilevamento della distanza a infrarossi. L’auto riceve il segnale dai sensori di distanza a infrarossi e poi il programma la guiderà per compiere delle azioni.
È necessario completare la lezione 1 (assemblaggio dell’auto) prima di proseguire con questa lezione.
Parti e dispositivi:
Numero
Immagine
Dispositivo
Quatità
Accessori
Collegamento
1
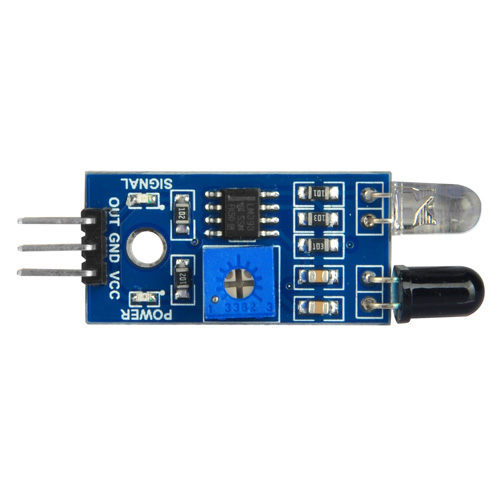
Sensore di distanza IR
2
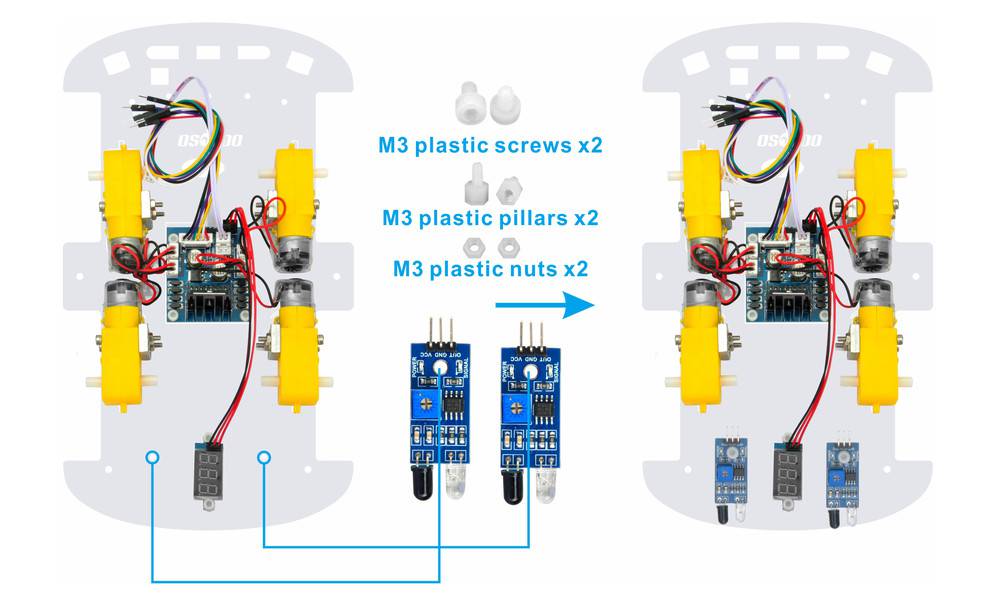
Vite M3 in plastica x 2
Pilastro in plastica M3 x 2
Dado in plastica M3 x 2
Passo 1: Installare la struttura di base della smart car come da Lezione 1 della smart car. Se avete già completato l’installazione nella Lezione 1, mantenetela così com’è.
Passo 2: Rimuovere le viti sui montanti in rame e aggiungere 2 pezzi di sensore di distanza IR sull’auto. Installare i sensori di distanza IR con 2 pezzi di viti in plastica M3, montanti in plastica M3 e dadi in plastica M3 sul retro del telaio dell’auto bassa.
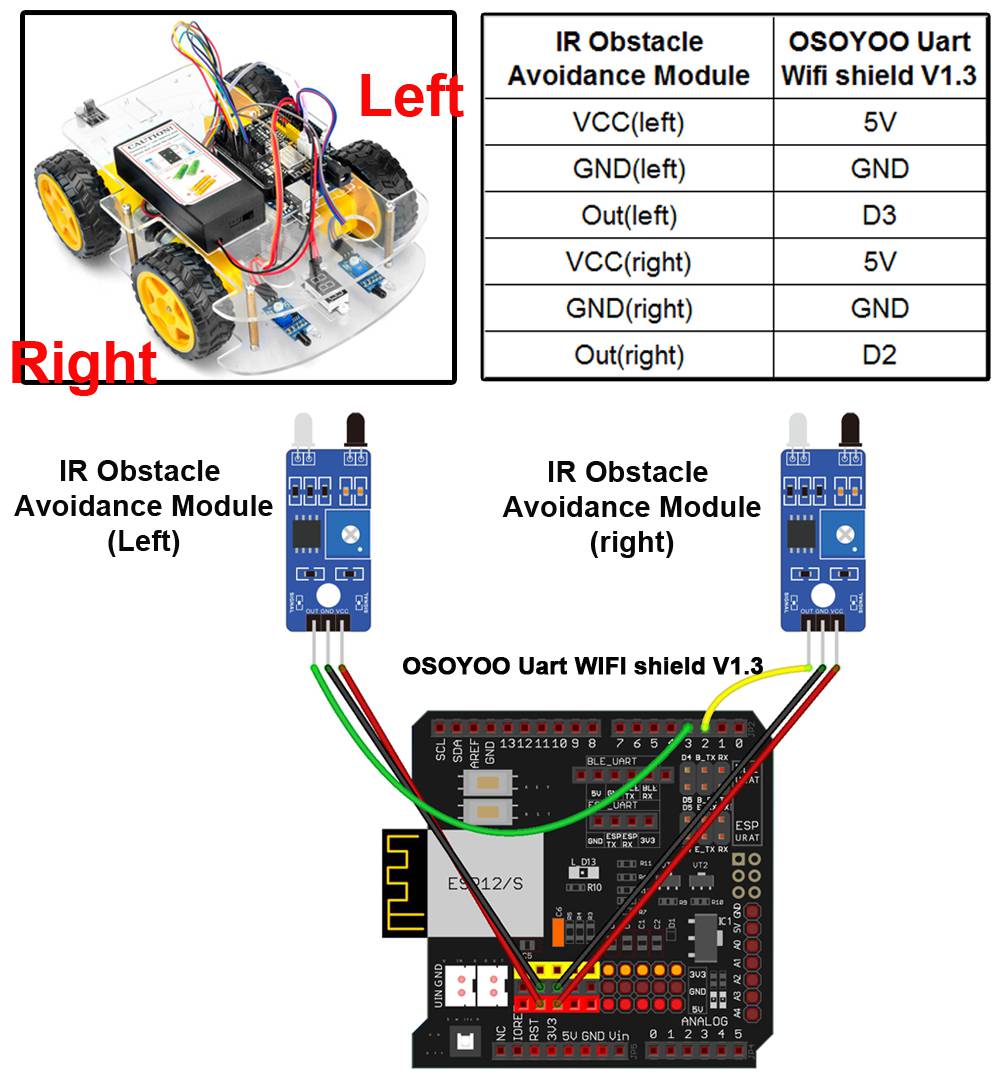
Passo 3: Collegare 2 moduli di sensori di distanza IR come indicato nel seguente schema di collegamento (Ricorda: NON rimuovere i fili esistenti installati nella Lezione 1) :
Passo 4: Fissare le viti sui pilastri in rame per collegare il telaio superiore a quello inferiore.
Passo 1: Installare l’ultimo DE (se si dispone di una versione dell’IDE successiva alla 1.1.16, saltare questo passaggio). Scaricare l’IDE da https://www.arduino.cc/en/Main/Software?setlang=en , quindi installare il software.
Passo 2: Scaricare il codice di esempio della Lezione 3 da https://osoyoo.com/driver/v2smartcar-lesson3.zip , decomprimere il file zip scaricato v2smartcar-lesson3.zip, si vedrà una cartella chiamata v2smartcar-lesson3.
Passo 3: Collegare la scheda al PC con un cavo USB, aprire Arduino IDE -> fare clic su file -> fare clic su Open -> scegliere il codice “v2smartcar-lesson3.ino” nella cartella smartcar-lesson3, caricare il codice nella scheda。
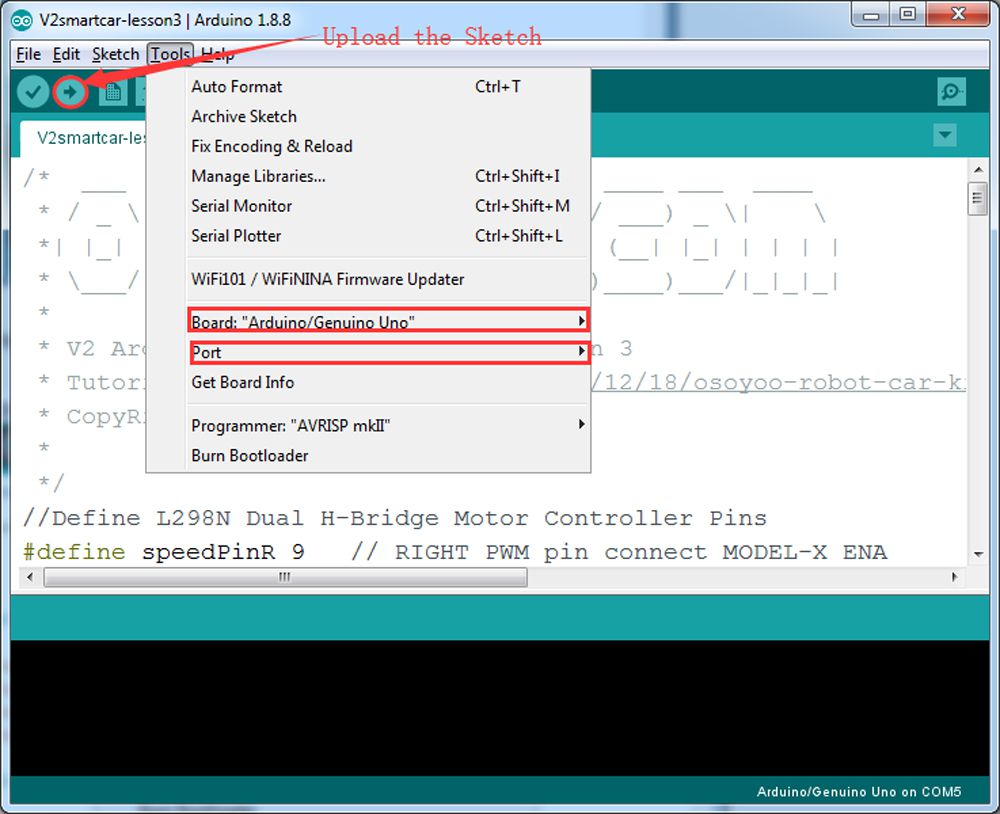
Passo 4: Scegliere la scheda/porta corrispondente al progetto, caricare lo sketch sulla scheda.
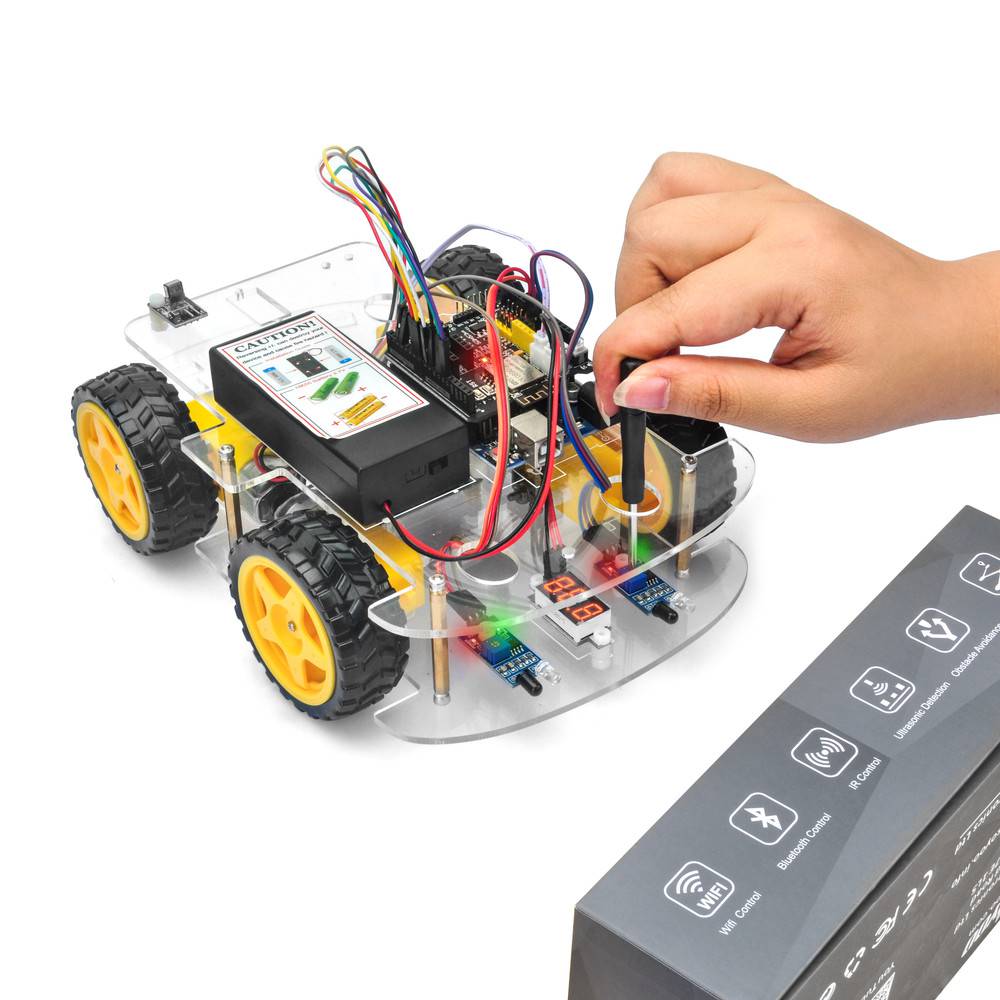
Passo 5: Accendere l’auto, posizionare l’oggetto a circa 10 cm davanti a ciascun sensore di distanza IR e regolare il potenziometro sui sensori di distanza IR per rilevare l’oggetto o la mano.
Nota: quando il modulo rileva degli oggetti, l’indicatore di alimentazione e l’indicatore di segnale sono accesi. Quando si sposta l’oggetto oltre la distanza di rilevamento, l’indicatore di alimentazione è acceso. Se l’indicatore di segnale è sempre acceso anche se l’oggetto supera la distanza di rilevamento, è necessario regolare anche il potenziometro
Test:
Accendere l’auto, spostare l’oggetto o la mano davanti all’auto e l’auto si muoverà di conseguenza: sembra che la si tiri. Va avanti quando entrambi i moduli IR per la prevenzione degli ostacoli rilevano l’oggetto o la mano; gira a destra quando i moduli IR per la prevenzione degli ostacoli rilevano l’oggetto; gira a sinistra quando i sensori di distanza IR di sinistra rilevano l’oggetto.
Quando l’oggetto o la mano si trova a più di 10 cm di distanza, si ferma.
Nota:
1) Poiché i moduli dei sensori di distanza IR sono installati sul retro dell’auto, tutte le direzioni di movimento sono contrarie agli altri percorsi.
2) L’auto può solo andare avanti, girare a destra e a sinistra, ma non può tornare indietro.
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help



















Hello, the object sensors are very weak. I have to put a paper about 2 cm to the car to detect it. Any suggestions ?
you can adjust the sensitivity potentiometer with a screwdriver. see this https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson3/3.jpg
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
Can someone please help me order replacements?
Oh, good grief. Never mind. I completely failed to notice the “click here to buy” link next to the parts list above.
OK, If you get any issue, please contact me again. Thanks.
Hi,
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
Kelvin.
Does the saftware notice successfully?
Pleas confirm you download the lesson 2 IR remote car or this commented lesson(lesson3).
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
Thank you. Your interest and support make us progress
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
Please provide your order No. and address, I’ll send the IR to you ASAP.
I have had this same problem have you managed to sort it out or is a new part needed?
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help
Is one of the sensers suppose to have gunk on it?
Why do you ask such question? Our sensors should be brand new and clean in the package.