NOTA: TUTTI I PRODOTTI OSOYOO PER ARDUINO SONO SCHEDE DI TERZE PARTI COMPLETAMENTE COMPATIBILI CON ARDUINO
Rivenditori online autorizzati
Dove acquistare il set con batterie 18650 e caricatore USB
Acquista dagli OSOYOO
Acquista dagli US
Acquista dagli UK
Acquista dagli DE
Acquista dagli IT
Acquista dagli FR
Acquista dagli ES
Acquista dagli JP
Dove acquistare il set con custodie batteria 9V e 18650
Acquista dagli OSOYOO
Acquista dagli US
Acquista dagli UK
Acquista dagli DE
Acquista dagli IT
Acquista dagli FR
Acquista dagli ES
Acquista dagli JP
Obiettivo:
In questo progetto collegheremo l’auto robot al WiFi e utilizzeremo un’app per controllarla tramite Internet. Questa è un’applicazione tipica dell’Internet of Things (IoT).
Prima di iniziare questa lezione, è necessario aver completato la lezione 5.
Passo 1: Assemblare il telaio base dell’auto intelligente come descritto nellalezione 5. Se il sensore di tracciamento non è ancora installato, completare prima la lezione 5.
Passo 2: Collegare:
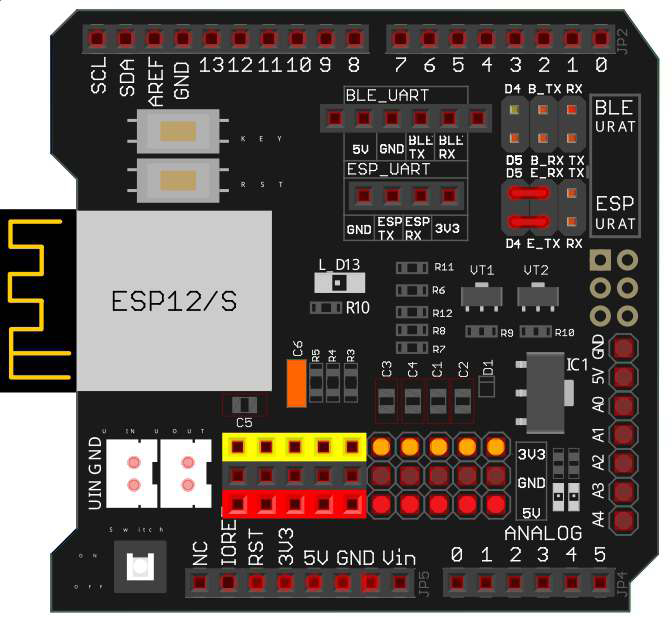
E_TX (TX ESP8266) → D4 (RX seriale software)
E_RX (RX ESP8266) → D5 (TX seriale software)
⚠️ Nota: per impostazione predefinita, sullo OSOYOO UART WiFi Shield V1.3 i pin TX/RX BLE UART sono collegati a D4/D5 tramite jumper.
.
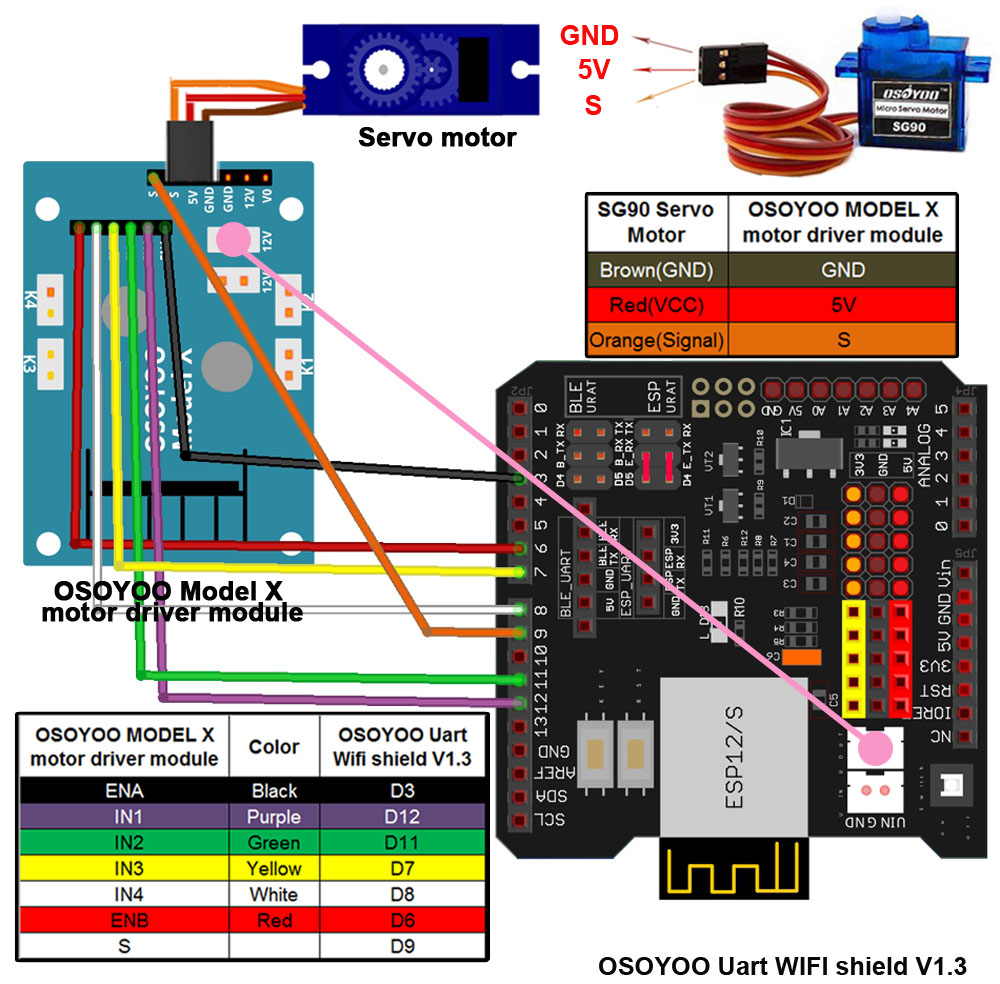
Passo 3: Collegare il servo SG90, il modulo driver motore OSOYOO e lo UART WiFi Shield seguendo lo schema elettrico:
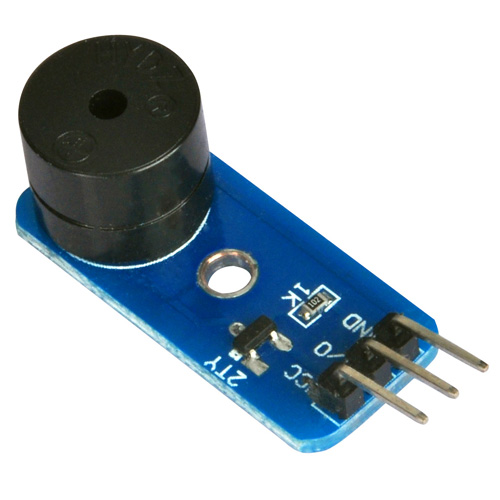
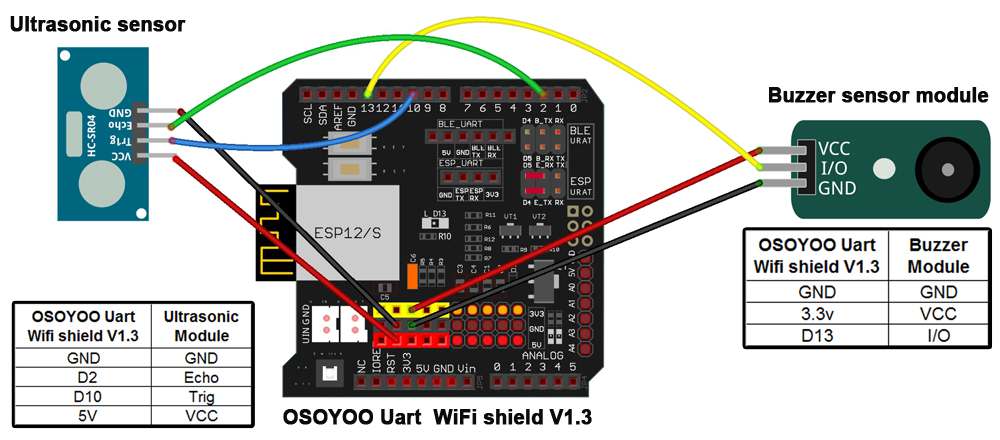
Passo 4: Collegare il sensore a ultrasuoni e il buzzer allo WiFi Shield
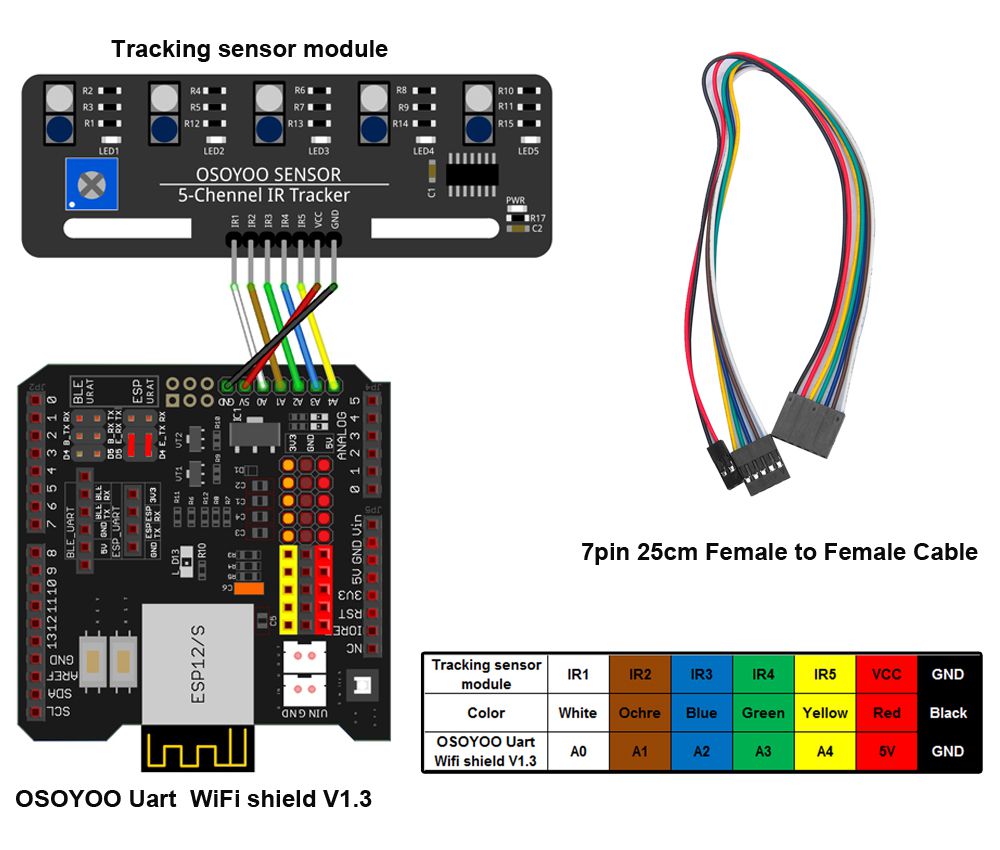
Passo 5: Collegare il sensore di tracking allo WiFi Shield come spiegato nella Lezione 4
Note:
1)Ricordarsi di regolare la sensibilità dei moduli del sensore di tracciamento come per la lezione del link 4 2)Ricordarsi di effettuare l’allineamento della direzione del sensore a ultrasuoni come da lezione 5 del link
ricerca “Osoyoo WIFI UDP Robot APP” in
Google Play o Apple Store (se non riuscite a trovare questa APP in Google Play,
potete scaricare direttamente l’APP dal seguente link: https://osoyoo.com/driver/udp-app.apk)
Passo 2) Scaricare il file zip della libreria da WiFiEsp-master .Aprire l’IDE ->fare clic su Sketch ->Includere la libreria ->Aggiungere la libreria .ZIP, quindi caricare il file zip di cui sopra in sketch.
Passo 3) Codice di schizzo Installazione:
Osoyoo V2 Robot Car può funzionare in due modalità WIFI: Modalità STA e modalità AP. I disegni di queste due modalità sono diversi. Spieghiamo queste due modalità una per una
A)Modalità STA In modalità STA, V2.1 Robot Car sarà un dispositivo client del router LAN. È necessario salvare il nome SSID e la password del router LAN nello schizzo.
Una volta eseguito lo sketch, il servizio DHCP del router assegnerà un indirizzo IP all’auto robot e l’APP utilizzerà questo indirizzo IP per accedere all’auto.
1) Scaricare il codice dello schizzo in modalità STA da v2smartcar-lesson6A . Decomprimere il file e vedere la cartella “v2smartcar-lesson6A”. Aprire l’IDE -> fare clic su file -> fare clic su Open -> scegliere il codice “v2smartcar-lesson6A.ino” nella cartella v2smartcar-lesson6A, caricare il codice nella scheda.
2) Modificare nel codice i parametri WiFi::
char ssid[] = “YOUR_ROUTER_SSID”; // sostituirlo con l’SSID del router
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // sostituire con la password del wifi
3) Caricare lo sketch sulla scheda. Infine, fate clic sulla finestra Monitor seriale nell’angolo in alto a destra dell’IDE; vedrete il seguente risultato:
4) In questa modalità, si vedrà un indirizzo IP che è il nostro indirizzo IP LAN assegnato dal mio router. Annotare questo indirizzo IP e fare clic su Impostazione per impostare l’indirizzo IP del robot e impostare questo indirizzo IP nella sezione Impostazione APP e Port su 8888 nelle impostazioni.
B)Modalità AP
A volte non disponiamo di un router LAN o WIFI. Per controllare l’auto, è necessario utilizzare la modalità AP.
Quando funziona in modalità AP, l’auto robot diventa un hot spot WIFI. Il nostro telefono cellulare può connettersi all’auto robot come client WIFI. L’indirizzo IP del robot è fissato a 192.168.4.1 e non è connesso alla rete WAN.
1) Scaricare lo schizzo dal seguente link: v2smartcar-lesson6B. Decomprimete il file e vedrete una cartella “v2smartcar-lesson6B”. Aprire l’IDE -> fare clic su file -> fare clic su Open -> scegliere il codice “v2smartcar-lesson6B.ino” nella cartella v2smartcar-lesson6B, caricare il codice nella scheda.
2) Aprite Serial monitor e vedrete un risultato simile a quello della modalità STA. Nella finestra verrà visualizzato un nuovo SSID WIFI “osoyoo_robot” con indirizzo IP 192.168.4.1. Ciò significa che l’auto robot ha un hot spot WIFI denominato “osoyoo_robot”, il cui indirizzo IP è 192.168.4.1.
3) Collegare il telefono cellulare all’hot_spot wifi “osoyoo_robot” e impostare l’indirizzo IP come “192.168.4.1” e la porta a 8888 nella sezione Impostazioni APP
Ora la vostra auto robot diventa un hot spot WIFI, è possibile utilizzare il controllo del telefono cellulare l’auto robot.
Final Testing:
Accendere la macchina. Ora fare clic su Impostazione per impostare l’indirizzo IP del robot.
A) In modalità STA, è necessario collegare il telefono cellulare allo stesso ssid LAN dell’auto robot e impostare l’indirizzo IP come l’IP del robot visualizzato in Serial Monitor.
B) In modalità AP, è necessario contattare il telefono cellulare con l’hot_spot wifi “osoyoo_robot” e impostare l’indirizzo IP come 192.168.4.1.
è possibile fare clic sui tasti di direzione ◄ ► ▲ ▼ per far muovere l’auto. Utilizzare il tasto || pause per fermare il movimento dell’auto.
Se si fa clic sul tasto F8, l’auto eseguirà una guida automatica per evitare gli ostacoli, come nella Lezione 5
Se si fa clic sul tasto F7, l’auto eseguirà una guida automatica con tracciamento dei collegamenti simile a la lezione 4.
Nota: F1~F6 sono funzioni che verranno sviluppate in futuro.
FAQ sull’APP UDP WIFI e sul codice di schizzo:
Q1)Come regolare la velocità dell’auto robot? A: Se si desidera modificare le prestazioni di velocità dell’automobile robotica, si consiglia di inserire i seguenti parametri nelle righe da 11 a 13:
SPEED valore determina la velocità di avanzamento
TURN_SPEED valore determina la velocità di rotazione
SHIFT_SPEED velocità di spostamento in parallelo
Q 2)Cosa succede quando si premono i pulsanti in OSOYOO WiFi UDP Robot Car APP? A: Quando si preme un pulsante dell’APP, l’APP invia un messaggio di una sola lettera attraverso il protocollo UDP al dispositivo di destinazione (in questo esempio, il nostro scudo WIFI)
Pulsante
Messaggio UDP
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
square
E
F7
O
F8
T
Q3)Come la scheda gestisce il comando UDP?
Following switch(c) statements in v2smartcar-lesson6 sketch file are handling the UDP command
switch (c) //serial control instructions
{
case 'A':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_ADVANCE; WorkMode="GO_ADVANCE";break;
case 'L':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_LEFT; WorkMode="GO_LEFT";break;
case 'R':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_RIGHT;WorkMode="GO_RIGHT";break;
case 'B':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_BACK;WorkMode="GO_BACK";break;
case 'E':Drive_Status=MANUAL_DRIVE; Drive_Num=STOP_STOP;WorkMode="STOP_STOP";break;
case 'O':Drive_Status=AUTO_DRIVE_UO;Serial.println("go OBSTACLE");WorkMode="OBSTACLE";break;
case 'T':Drive_Status=AUTO_DRIVE_LF;WorkMode="line follow";break;
case 'G':track_speed=track_speed+10;
if(track_speed>200) track_speed=200
;break;
case 'J':track_speed=track_speed-10;
if(track_speed<80) track_speed=80
;break;
default:break;
} //END OF ACTION SWITCH
Nel codice precedente, c nelle parentesi switch() è il dato UDP inviato dall’APP del telefono cellulare. Una volta premuto il tasto ▲ dell’APP, la riga case ‘A’ … gestirà il comando e farà avanzare l’automobile.
I am trying to use the first version of the WIFI code (STA Mode). I got the code to compile and load into the robot, however, I am getting an error stating -Cannot initialize ESP module, WIFI Shield is not present.
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
3. Please confirm that the voltage is more than 7.2V.
Still waiting on answer to my question for Lesson 5. So now I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module”
“WiFi ESP TIMEOUT” “cannot initialize ESP module” “WiFi Shield not present” . I have checked the router but it does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module, W[WiFiESP] Initilization successful, W[WiFiESP] Attempting to connect to [ssid] , w[WiFiESP] failed connecting to [ssid]. etc ——-
The router does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
based on your description, you are very very very very likely to have written wrong SSID or PASSWORD in the sketch code. Please double check every letter of your SSID and password in the code include space and everything. Also make sure your robot car is connecting to a wifi router, not to a cell phone hotspot. Cell phone hotspot might block ESP8266 as STA client.
Hi,
You were correct I had missed out one of the letters in the password. The print is so small my old eyes are not so good for that.
Many thanks for your help.
Regards, Jim.
when I try to sketch lesson 6 I get the following error message
C:\Users\Steve\Desktop\v2smartcar-lesson6A\v2smartcar-lesson6A.ino:11:10: fatal error: WiFiEspUdp.h: No such file or directory
#include
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Compilation error: WiFiEspUdp.h: No such file or directory
Did I miss something?
I redownloaded the first set and sketched it now I’m getting
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
You need change the code Line 96 and Line 98 :
char ssid[] = “YOUR_ROUTER_SSID”; // replace this with your router wifi SSID
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // replace with your wifi password
3. Please confirm that the voltage is more than 7.2V.
I have uploaded this sketch ok. However how can I see the debug output in the Serial Monitor ?
When connected via a USB cable the serial monitor shows output. However, as soon as the car is untethered the connection is lost.
When connected the monitor say to open a browser window, which is where I assume I will see the monitor, however, the browser does not find a page at the location stated.
9:48:21.699 -> [WiFiEsp] Initializing ESP module
09:48:26.458 -> [WiFiEsp] Initilization successful – 1.5.4
09:48:26.525 -> Attempting to connect to WPA SSID: BT-XXXXXX
09:48:31.543 -> [WiFiEsp] Connected to BT-XXXXX
09:48:31.607 -> You’re connected to the network
09:48:31.642 ->
09:48:31.642 -> IP Address: 192.168.1.220
09:48:31.677 ->
09:48:31.677 -> To see this page in action, connect to BT-6MA89Q and open a browser to http://192.168.1.220
09:48:31.772 ->
09:48:31.772 -> Listening on port 8888
I’m running into the same problem that many others seem to have hit. I can’t get the wifi module to connect at all. I’ve swapped two different UNOs, two different Mega2560s, and all the wiring I can. I have the Arduino powered from a 12V wall wart (I had everything on the robot, but pulled it apart to make sure that wasn’t the issue).
The code stops running after the WiFi.init call returns with a WL_NO_SHIELD value, so this isn’t an issue with the network settings. I’ve even tried the network scanner example from the wifi library to see if that might be an issue.
On the UNO I leave the jumpers in place across D4/E_TX and D5/E_RX. On the 2560 I’ve various pairings of E_RX/D1[89] and E_TX/D1[89]. I’m stuck here. Do I have a bad board or is there more testing I can do?
Ok, got thru the first part. The shield starts out at 115200bps and without that there’s no communication. Now I can get the shield connected to my local wifi. But, the part that says connect a browser to http://addr:8888 doesn’t work. Shouldn’t the shield be using TCP here? I can see the device on my local network.
11:30:34:179 -> [WiFiEsp] Connected to xxxxx
11:30:34:215 -> You’re connected to the network
11:30:34:251 ->
11:30:34:251 -> IP Address: 192.168.54.36
11:30:34:280 -> 3C:E9:0E:E5:4D:44
11:30:34:301 ->
11:30:34:301 -> To see this page in action, connect to xxxxx and open a browser to http://192.168.54.36:8888
11:30:34:407 -> Listening on port 8888































I am trying to use the first version of the WIFI code (STA Mode). I got the code to compile and load into the robot, however, I am getting an error stating -Cannot initialize ESP module, WIFI Shield is not present.
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
3. Please confirm that the voltage is more than 7.2V.
Still waiting on answer to my question for Lesson 5. So now I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module”
“WiFi ESP TIMEOUT” “cannot initialize ESP module” “WiFi Shield not present” . I have checked the router but it does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module, W[WiFiESP] Initilization successful, W[WiFiESP] Attempting to connect to [ssid] , w[WiFiESP] failed connecting to [ssid]. etc ——-
The router does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I refer to my question of December 13th at 9.16pm. Have you any suggestions why my Shield will not connect to my WiFi ESP?
Regards, Jim Robb
hi, James Robb,
based on your description, you are very very very very likely to have written wrong SSID or PASSWORD in the sketch code. Please double check every letter of your SSID and password in the code include space and everything. Also make sure your robot car is connecting to a wifi router, not to a cell phone hotspot. Cell phone hotspot might block ESP8266 as STA client.
Hi,
You were correct I had missed out one of the letters in the password. The print is so small my old eyes are not so good for that.
Many thanks for your help.
Regards, Jim.
when I try to sketch lesson 6 I get the following error message
C:\Users\Steve\Desktop\v2smartcar-lesson6A\v2smartcar-lesson6A.ino:11:10: fatal error: WiFiEspUdp.h: No such file or directory
#include
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Compilation error: WiFiEspUdp.h: No such file or directory
Did I miss something?
I redownloaded the first set and sketched it now I’m getting
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
You need change the code Line 96 and Line 98 :
char ssid[] = “YOUR_ROUTER_SSID”; // replace this with your router wifi SSID
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // replace with your wifi password
3. Please confirm that the voltage is more than 7.2V.
I have uploaded this sketch ok. However how can I see the debug output in the Serial Monitor ?
When connected via a USB cable the serial monitor shows output. However, as soon as the car is untethered the connection is lost.
When connected the monitor say to open a browser window, which is where I assume I will see the monitor, however, the browser does not find a page at the location stated.
9:48:21.699 -> [WiFiEsp] Initializing ESP module
09:48:26.458 -> [WiFiEsp] Initilization successful – 1.5.4
09:48:26.525 -> Attempting to connect to WPA SSID: BT-XXXXXX
09:48:31.543 -> [WiFiEsp] Connected to BT-XXXXX
09:48:31.607 -> You’re connected to the network
09:48:31.642 ->
09:48:31.642 -> IP Address: 192.168.1.220
09:48:31.677 ->
09:48:31.677 -> To see this page in action, connect to BT-6MA89Q and open a browser to http://192.168.1.220
09:48:31.772 ->
09:48:31.772 -> Listening on port 8888
This web address just doesn’t load http://192.168.1.220 – Any Ideas ?
I’m running into the same problem that many others seem to have hit. I can’t get the wifi module to connect at all. I’ve swapped two different UNOs, two different Mega2560s, and all the wiring I can. I have the Arduino powered from a 12V wall wart (I had everything on the robot, but pulled it apart to make sure that wasn’t the issue).
The code stops running after the WiFi.init call returns with a WL_NO_SHIELD value, so this isn’t an issue with the network settings. I’ve even tried the network scanner example from the wifi library to see if that might be an issue.
On the UNO I leave the jumpers in place across D4/E_TX and D5/E_RX. On the 2560 I’ve various pairings of E_RX/D1[89] and E_TX/D1[89]. I’m stuck here. Do I have a bad board or is there more testing I can do?
[WiFiEsp] Initializing ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
Ok, got thru the first part. The shield starts out at 115200bps and without that there’s no communication. Now I can get the shield connected to my local wifi. But, the part that says connect a browser to http://addr:8888 doesn’t work. Shouldn’t the shield be using TCP here? I can see the device on my local network.
11:30:34:179 -> [WiFiEsp] Connected to xxxxx
11:30:34:215 -> You’re connected to the network
11:30:34:251 ->
11:30:34:251 -> IP Address: 192.168.54.36
11:30:34:280 -> 3C:E9:0E:E5:4D:44
11:30:34:301 ->
11:30:34:301 -> To see this page in action, connect to xxxxx and open a browser to http://192.168.54.36:8888
11:30:34:407 -> Listening on port 8888
Do you have a model for App inventor as a guide
what kind of model do you need?please email to [email protected]
Eu gostaria de replicar a app, mas estou com dificuldades. Criaram a app com o MIT Inventor; se sim, como?
Sorry, we don’t know the reason why you want to copy this APP?