NOTA: TODOS LOS PRODUCTOS OSOYOO PARA Arduino SON PLACAS DE TERCEROS QUE SON TOTALMENTE COMPATIBLES CON ARDUINO
Comercios autorizados
Dónde comprar el kit con pilas 18650 y cargador USB
Comprar desde OSOYOO
Comprar desde US
Comprar desde UK
Comprar desde DE
Comprar desde IT
Comprar desde FR
Comprar desde ES
Comprar desde JP
Dónde comprar el kit con estuches de batería 9 V y 18650
Comprar desde OSOYOO
Compra desde US
Comprar desde UK
Comprar desde DE
Comprar desde IT
Comprar desde FR
Comprar desde ES
Comprar desde JP
Objetivo
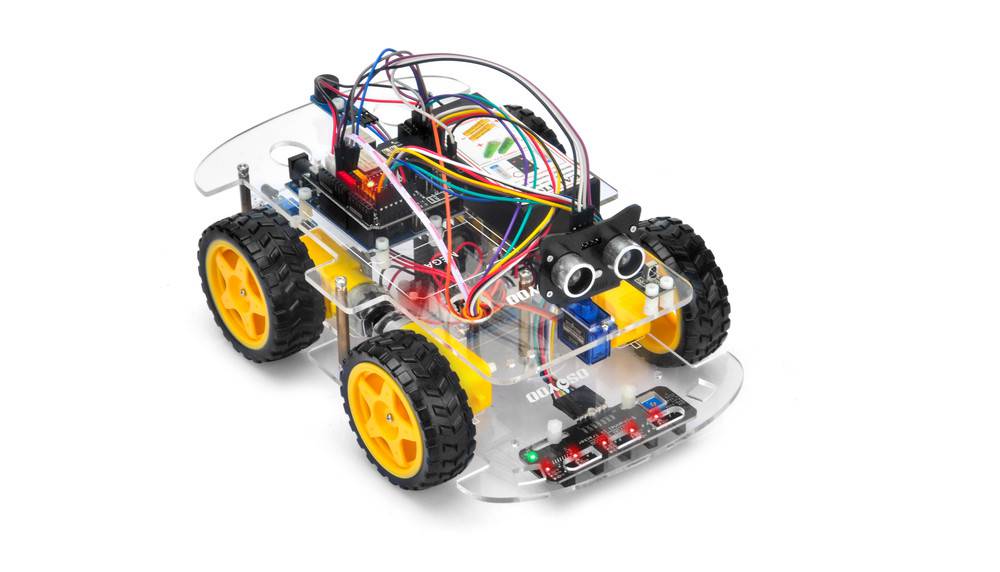
En este proyecto conectaremos el robot automáticamente a WIFI y utilizaremos una aplicación para controlar el robot a través de Internet. Esta es una aplicación típica de Internet de las cosas (IoT).
Debe completar la Lección 5 antes de continuar con esta lección.
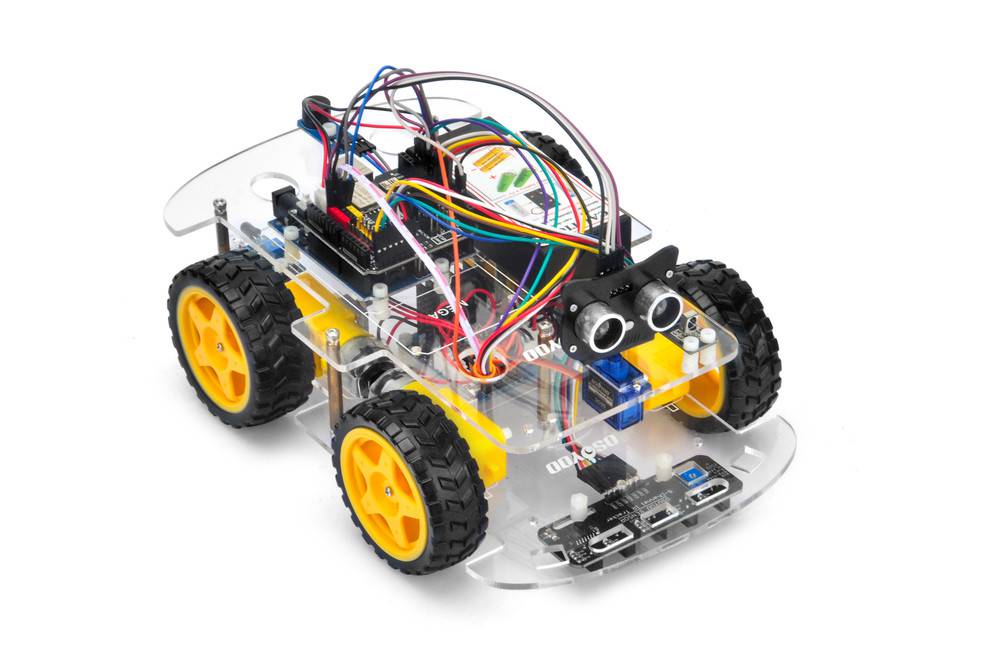
Paso 1: instale el marco básico del auto robot inteligente según la Lección 5 . Si no instaló el módulo del sensor de seguimiento, complete la instalación en la Lección 4 .
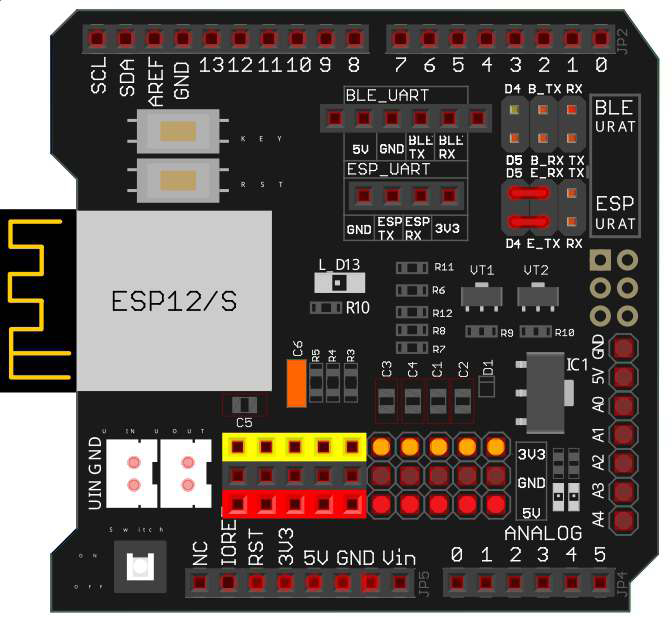
Paso 2: conecte el pin E_TX (Esp8266 TX) a D4 (software serial RX para UNO) y el pin E_RX (ESP8266_RX) a D5 (software serial TX para UNO) como se muestra en la siguiente imagen:
(Nota: Nuestro escudo OSOYOO Uart WiFi V1.3 está conectado a los puertos BLE URAT TX/RX a D4, D5 con tapas de puente de forma predeterminada. Si encuentra que los puertos BLE URAT TX/RX están conectados, debe quitar este puente y cambiar para conectar ESP URAT E-TX a D4 y E-RX a D5)
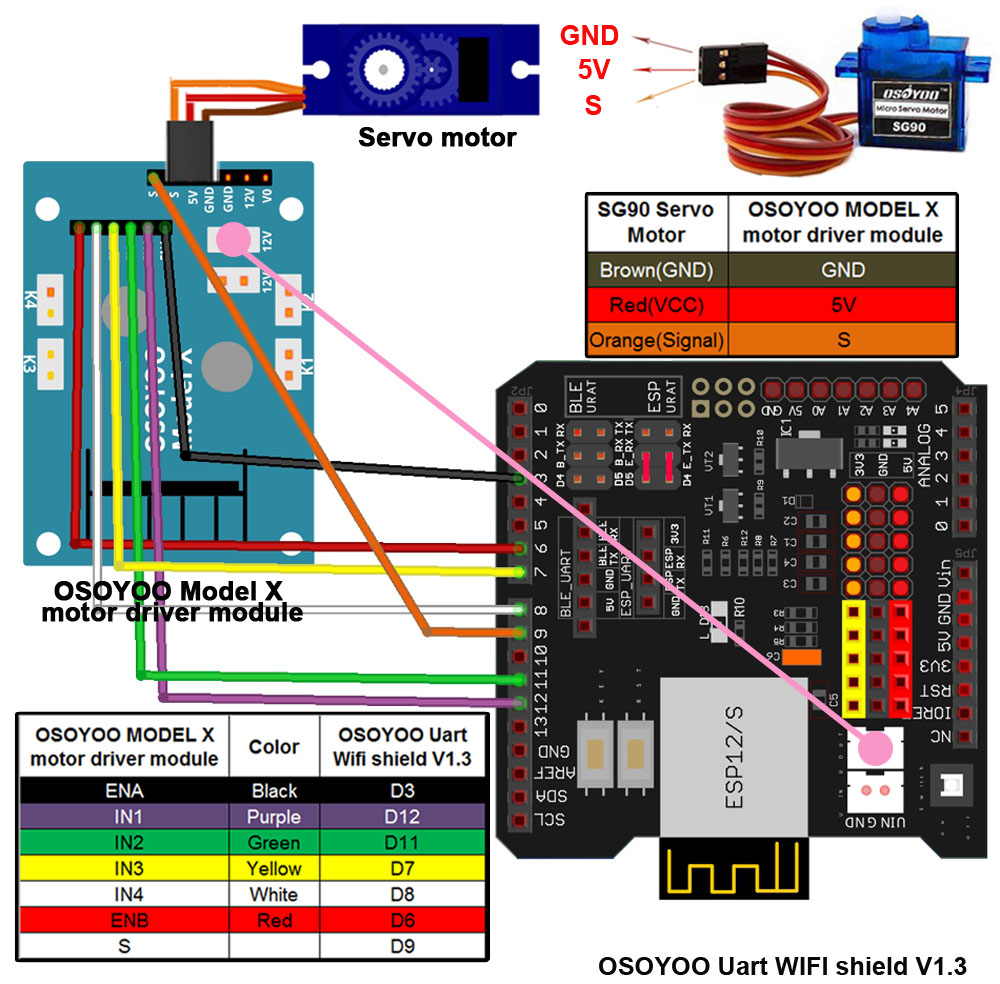
Paso 3: conecte el servomotor SG90, el módulo del controlador de motor OSOYOO modelo X y el escudo OSOYOO Uart WiFi V1.3 como se muestra en el siguiente gráfico (si conectó los cables en la lección 5, omita este paso) :
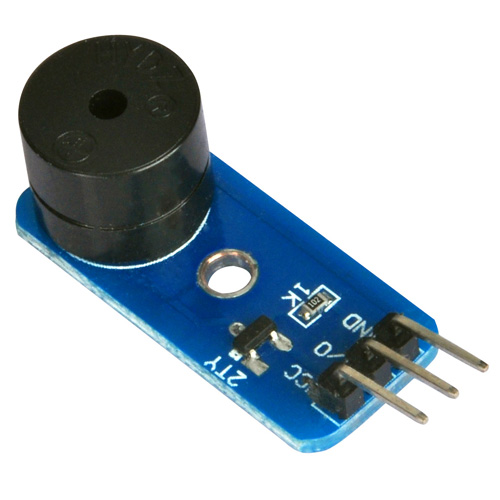
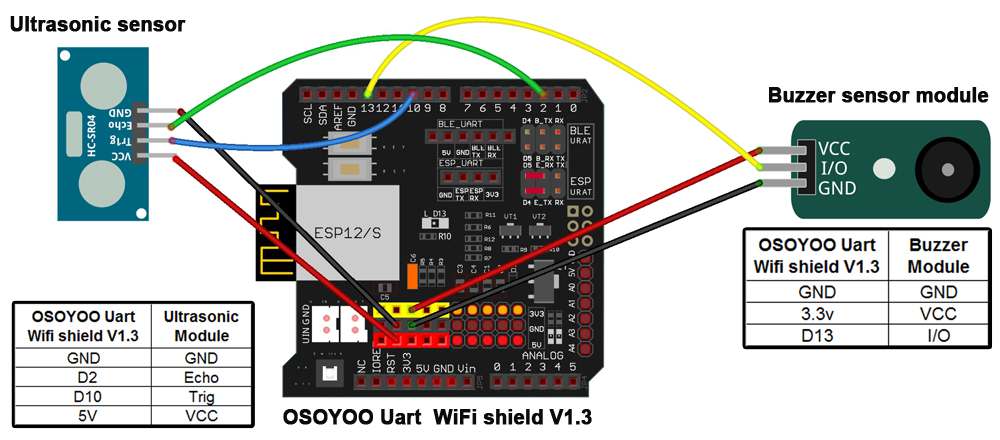
Paso 4: conecte el módulo ultrasónico, el módulo del zumbador con el escudo OSOYOO Uart WiFi V1.3 como se muestra a continuación en el diagrama de conexión (si completa los cables en la lección 5, omita este paso) :
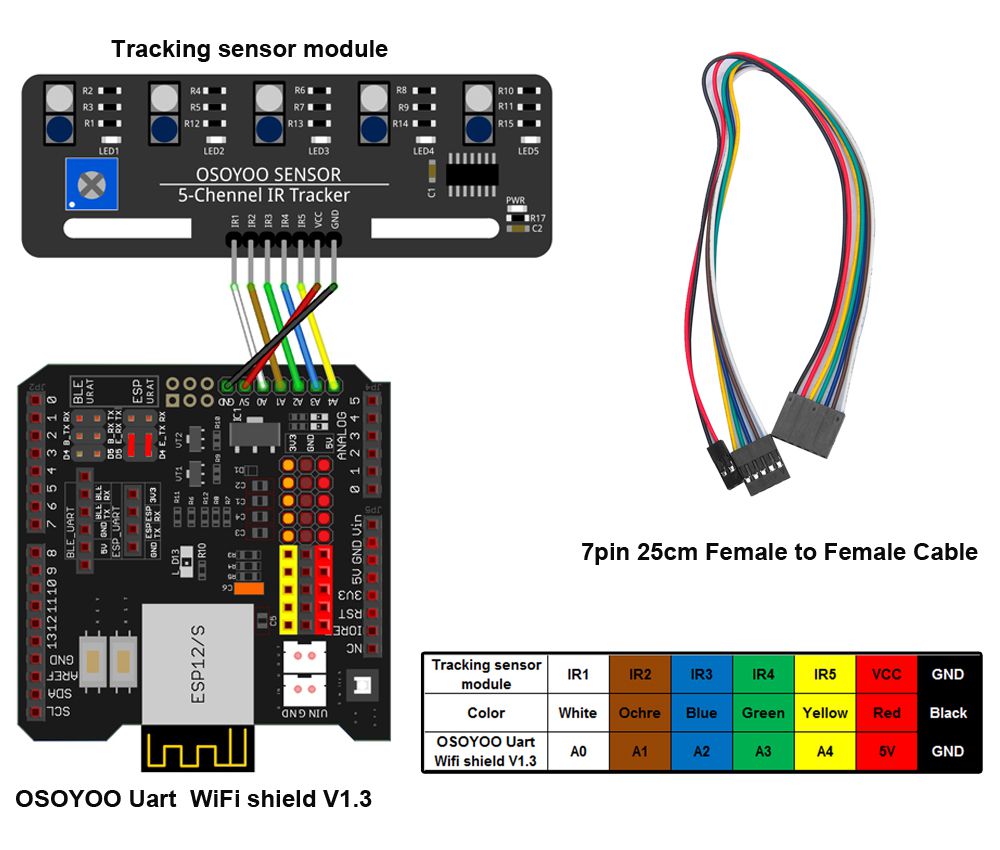
Paso 5: conecte el módulo del sensor de seguimiento con el escudo OSOYOO Uart WiFi V1.3 como se muestra a continuación en el diagrama de conexión (si completa los cables en la Lección 4, omita este paso)
Sustantivo:
1)recuerde ajustar la sensibilidad de los módulos del sensor de seguimiento según la Lección 4.
2)recuerde hacer la alineación de la dirección del sensor ultrasónico según la Lección 5.
Busque “Osoyoo WIFI UDP Robot APP” en
Google Play o Apple Store
(Si no encuentras esta APP en Google Play,
puedes descargar directamente la APP desde el siguiente enlace:https://osoyoo.com/driver/udp-app.apk)
Paso 1) descargue la Aplicación de control del auto robot UDP WIFI OSOYOO en Google Play o Apple Store, busque las palabras clave “Auto robot UDP WIFI OSOYOO”, encontrará una aplicación de ícono naranja de la siguiente manera (Nota: Si no encuentras esta APP en Google Play, puedes descargar directamente la APP desde el siguiente enlace: https://osoyoo.com/driver/udp-app.apk):
Paso 2) descargue el archivo zip de la biblioteca WifiEsp-master . Abra el IDE -> haga clic en Sketch -> Incluir biblioteca -> Agregar biblioteca .ZIP, luego cargue el archivo zip anterior en la opción Sketch .
Paso 3) Instalación del código Sketch
El auto robot OSOYOO V2.1 puede funcionar en dos modos WIFI: modo STA y modo AP. Los códigos para estos dos modos son diferentes, a continuación se explicarán estos dos modos uno por uno.
A) Modo STA
En modo STA, el autop robot V2.1 será un dispositivo cliente de su enrutador LAN. Debe guardar el nombre SSID y la contraseña de su enrutador LAN en el código.
Una vez que se ejecuta el código, el servicio DHCP de su enrutador asignará una dirección IP a su auto robot y su aplicación se detendrá esta dirección IP para acceder a su auto.
1) Descargue el código del modo STA de v2smartcar-lesson6A . Descomprima el archivo, verá una carpeta “v2smartcar-lesson6A”. Abra el IDE -> haga clic en Archivo -> haga clic en Abrir -> elija el código “v2smartcar-lesson6A.ino” en la carpeta v2smartcar-lesson6A y luego cargue el código en su placa.
2) Necesita cambiar del código:
char ssid[] = “SU_ENRUTADOR_SSID”; // reemplace esto con su identificador SSID de red WIFI
char pass[] = “SU_CONTRASEÑA_WIFI”; // reemplace con su contraseña del WIFI
3) Suba el código a su placa. Finalmente, haga clic en la ventana del monitor Serial en la esquina superior derecha de IDE y verá el siguiente resultado:
4) en este modo verá una dirección IP que es nuestra dirección LAN IP destacada por mi enrutador. Escriba esta dirección IP y haga clic en Configuración (Settings) para configurar la dirección IP del robot y establezca esta dirección IP en la sección Configuración de su aplicación y puerto en 8888 en la configuración.
B) modo AP
En ocasiones no disponemos de un Router LAN o WIFI. Para controlar el auto robot debemos usar el modo AP. Cuando trabaje en modo AP, nuestro robot se cambiará en un punto de acceso WiFi. Nuestro celular puede conectarse a un auto robot como su cliente WIFI. La dirección IP fija del robot es 192.168.4.1 y no está conectada a la WAN.
1) Descargue el código desde el siguiente enlace: v2smartcar-lesson6B . Descomprima el archivo, verá una carpeta “v2smartcar-lesson6B”. Abra el IDE -> haga clic en Archivo -> haga clic en Abrir -> elija el código “v2smartcar-lesson6B.ino” en la carpeta v2smartcar-lesson6B y luego cargue el código en su placa.
2) Abra el monitor Serial y verá un resultado similar al del modo STA. En la ventana aparecerá un nuevo SSID de la WIFI “osoyoo_robot” con la dirección IP 192.168.4.1. Esto significa que su auto robot tiene un nombre de punto de acceso WIFI “osoyoo_robot” y su dirección IP es 192.168.4.1
3) Conecte su teléfono celular al punto de acceso WIFI “osoyoo_robot”, y configure la dirección IP como “192.168.4.1” y el puerto a 8888 en la sección de Configuración (Settings) de su aplicación:
Ahora que su automóvil robot se convierte en un punto de acceso WIFI, puede usar el teléfono móvil para controlar el robot.
Pruebas
Encienda el auto robot y haga clic en Configuración para actualizar la dirección IP del robot.
A) En el modo STA necesita conectar el teléfono celular al mismo SSID de la red LAN de su auto robot y configurar la dirección IP igual que la IP del robot que se muestra en el Monitor Serial.
B) En el modo AP debe comunicarse con su teléfono celular a la punto de acceso WIFI “osoyoo_robot” y configurar la dirección IP como 192.168.4.1
puede hacer clic en las teclas de dirección ◄ ► ▲ ▼ para hacer que el auto robot se mueva. Use la tecla de pausa || para detener el movimiento del robot.
Si hace clic en la tecla F8, el robot realizará una conducción automática para evitar obstáculos similar a la Lección 5.
Si hace clic en la tecla F7, el robot realizará un seguimiento de enlace de conducción automática similar a la Lección 4.
Nota: F1 a F6 son funciones de desarrollo adicionales en el futuro.
Preguntas frecuentes sobre la aplicación WIFI UDP y el código de prueba:
P1) ¿Cómo ajustar la velocidad del auto robot? R: Si desea cambiar el rendimiento de la velocidad del auto robot modifique los parámetros de las líneas 11 a 13:
El valor SPEED determina la velocidad de movimiento hacia adelante.
El valor TURN_SPEED determina la velocidad de giro.
El valor SHIFT_SPEED determina la velocidad de cambio paralelo.
P 2) ¿Qué sucedió cuando presiona los botones en la aplicación del auto robot OSOYOO WiFi UDP? R: Cuando presiona un botón de la Aplicación , ésta enviará un mensaje de una sola letra a través del protocolo UDP al dispositivo de destino (en este ejemplo, nuestro escudo WIFI)
Botón
mensaje UDP
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
cuadrado
E
F7
O
F8
T
P3) ¿Cómo maneja la placa el comando UDP?
La sentencia switch (c) en el archivo del código v2smartcar-lesson6 está manejando el comando UDP
switch (c) // instrucciones del control serial
{
case 'A':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_ADVANCE; WorkMode="GO_ADVANCE";break;
case 'L':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_LEFT; WorkMode="GO_LEFT";break;
case 'R':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_RIGHT;WorkMode="GO_RIGHT";break;
case 'B':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_BACK;WorkMode="GO_BACK";break;
case 'E':Drive_Status=MANUAL_DRIVE; Drive_Num=STOP_STOP;WorkMode="STOP_STOP";break;
case 'O':Drive_Status=AUTO_DRIVE_UO;Serial.println("go OBSTACLE");WorkMode="OBSTACLE";break;
case 'T':Drive_Status=AUTO_DRIVE_LF;WorkMode="line follow";break;
case 'G':track_speed=track_speed+10;
if(track_speed>200) track_speed=200
;break;
case 'J':track_speed=track_speed-10;
if(track_speed<80) track_speed=80
;break;
default:break;
} //FIN DE LA SENTENCIA SWITCH
En el bloque anterior, el valor de c que está en el switch() contiene los datos UDP enviados desde la Aplicación del teléfono celular. Una vez que se presione la tecla APP ▲, entonces la línea case ‘A’ … programará el comando y hará que el robot avance.
I am trying to use the first version of the WIFI code (STA Mode). I got the code to compile and load into the robot, however, I am getting an error stating -Cannot initialize ESP module, WIFI Shield is not present.
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
3. Please confirm that the voltage is more than 7.2V.
Still waiting on answer to my question for Lesson 5. So now I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module”
“WiFi ESP TIMEOUT” “cannot initialize ESP module” “WiFi Shield not present” . I have checked the router but it does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module, W[WiFiESP] Initilization successful, W[WiFiESP] Attempting to connect to [ssid] , w[WiFiESP] failed connecting to [ssid]. etc ——-
The router does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
based on your description, you are very very very very likely to have written wrong SSID or PASSWORD in the sketch code. Please double check every letter of your SSID and password in the code include space and everything. Also make sure your robot car is connecting to a wifi router, not to a cell phone hotspot. Cell phone hotspot might block ESP8266 as STA client.
Hi,
You were correct I had missed out one of the letters in the password. The print is so small my old eyes are not so good for that.
Many thanks for your help.
Regards, Jim.
when I try to sketch lesson 6 I get the following error message
C:\Users\Steve\Desktop\v2smartcar-lesson6A\v2smartcar-lesson6A.ino:11:10: fatal error: WiFiEspUdp.h: No such file or directory
#include
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Compilation error: WiFiEspUdp.h: No such file or directory
Did I miss something?
I redownloaded the first set and sketched it now I’m getting
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
You need change the code Line 96 and Line 98 :
char ssid[] = “YOUR_ROUTER_SSID”; // replace this with your router wifi SSID
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // replace with your wifi password
3. Please confirm that the voltage is more than 7.2V.
I have uploaded this sketch ok. However how can I see the debug output in the Serial Monitor ?
When connected via a USB cable the serial monitor shows output. However, as soon as the car is untethered the connection is lost.
When connected the monitor say to open a browser window, which is where I assume I will see the monitor, however, the browser does not find a page at the location stated.
9:48:21.699 -> [WiFiEsp] Initializing ESP module
09:48:26.458 -> [WiFiEsp] Initilization successful – 1.5.4
09:48:26.525 -> Attempting to connect to WPA SSID: BT-XXXXXX
09:48:31.543 -> [WiFiEsp] Connected to BT-XXXXX
09:48:31.607 -> You’re connected to the network
09:48:31.642 ->
09:48:31.642 -> IP Address: 192.168.1.220
09:48:31.677 ->
09:48:31.677 -> To see this page in action, connect to BT-6MA89Q and open a browser to http://192.168.1.220
09:48:31.772 ->
09:48:31.772 -> Listening on port 8888
I’m running into the same problem that many others seem to have hit. I can’t get the wifi module to connect at all. I’ve swapped two different UNOs, two different Mega2560s, and all the wiring I can. I have the Arduino powered from a 12V wall wart (I had everything on the robot, but pulled it apart to make sure that wasn’t the issue).
The code stops running after the WiFi.init call returns with a WL_NO_SHIELD value, so this isn’t an issue with the network settings. I’ve even tried the network scanner example from the wifi library to see if that might be an issue.
On the UNO I leave the jumpers in place across D4/E_TX and D5/E_RX. On the 2560 I’ve various pairings of E_RX/D1[89] and E_TX/D1[89]. I’m stuck here. Do I have a bad board or is there more testing I can do?
Ok, got thru the first part. The shield starts out at 115200bps and without that there’s no communication. Now I can get the shield connected to my local wifi. But, the part that says connect a browser to http://addr:8888 doesn’t work. Shouldn’t the shield be using TCP here? I can see the device on my local network.
11:30:34:179 -> [WiFiEsp] Connected to xxxxx
11:30:34:215 -> You’re connected to the network
11:30:34:251 ->
11:30:34:251 -> IP Address: 192.168.54.36
11:30:34:280 -> 3C:E9:0E:E5:4D:44
11:30:34:301 ->
11:30:34:301 -> To see this page in action, connect to xxxxx and open a browser to http://192.168.54.36:8888
11:30:34:407 -> Listening on port 8888































I am trying to use the first version of the WIFI code (STA Mode). I got the code to compile and load into the robot, however, I am getting an error stating -Cannot initialize ESP module, WIFI Shield is not present.
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
3. Please confirm that the voltage is more than 7.2V.
Still waiting on answer to my question for Lesson 5. So now I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module”
“WiFi ESP TIMEOUT” “cannot initialize ESP module” “WiFi Shield not present” . I have checked the router but it does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module, W[WiFiESP] Initilization successful, W[WiFiESP] Attempting to connect to [ssid] , w[WiFiESP] failed connecting to [ssid]. etc ——-
The router does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I refer to my question of December 13th at 9.16pm. Have you any suggestions why my Shield will not connect to my WiFi ESP?
Regards, Jim Robb
hi, James Robb,
based on your description, you are very very very very likely to have written wrong SSID or PASSWORD in the sketch code. Please double check every letter of your SSID and password in the code include space and everything. Also make sure your robot car is connecting to a wifi router, not to a cell phone hotspot. Cell phone hotspot might block ESP8266 as STA client.
Hi,
You were correct I had missed out one of the letters in the password. The print is so small my old eyes are not so good for that.
Many thanks for your help.
Regards, Jim.
when I try to sketch lesson 6 I get the following error message
C:\Users\Steve\Desktop\v2smartcar-lesson6A\v2smartcar-lesson6A.ino:11:10: fatal error: WiFiEspUdp.h: No such file or directory
#include
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Compilation error: WiFiEspUdp.h: No such file or directory
Did I miss something?
I redownloaded the first set and sketched it now I’m getting
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
You need change the code Line 96 and Line 98 :
char ssid[] = “YOUR_ROUTER_SSID”; // replace this with your router wifi SSID
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // replace with your wifi password
3. Please confirm that the voltage is more than 7.2V.
I have uploaded this sketch ok. However how can I see the debug output in the Serial Monitor ?
When connected via a USB cable the serial monitor shows output. However, as soon as the car is untethered the connection is lost.
When connected the monitor say to open a browser window, which is where I assume I will see the monitor, however, the browser does not find a page at the location stated.
9:48:21.699 -> [WiFiEsp] Initializing ESP module
09:48:26.458 -> [WiFiEsp] Initilization successful – 1.5.4
09:48:26.525 -> Attempting to connect to WPA SSID: BT-XXXXXX
09:48:31.543 -> [WiFiEsp] Connected to BT-XXXXX
09:48:31.607 -> You’re connected to the network
09:48:31.642 ->
09:48:31.642 -> IP Address: 192.168.1.220
09:48:31.677 ->
09:48:31.677 -> To see this page in action, connect to BT-6MA89Q and open a browser to http://192.168.1.220
09:48:31.772 ->
09:48:31.772 -> Listening on port 8888
This web address just doesn’t load http://192.168.1.220 – Any Ideas ?
I’m running into the same problem that many others seem to have hit. I can’t get the wifi module to connect at all. I’ve swapped two different UNOs, two different Mega2560s, and all the wiring I can. I have the Arduino powered from a 12V wall wart (I had everything on the robot, but pulled it apart to make sure that wasn’t the issue).
The code stops running after the WiFi.init call returns with a WL_NO_SHIELD value, so this isn’t an issue with the network settings. I’ve even tried the network scanner example from the wifi library to see if that might be an issue.
On the UNO I leave the jumpers in place across D4/E_TX and D5/E_RX. On the 2560 I’ve various pairings of E_RX/D1[89] and E_TX/D1[89]. I’m stuck here. Do I have a bad board or is there more testing I can do?
[WiFiEsp] Initializing ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
Ok, got thru the first part. The shield starts out at 115200bps and without that there’s no communication. Now I can get the shield connected to my local wifi. But, the part that says connect a browser to http://addr:8888 doesn’t work. Shouldn’t the shield be using TCP here? I can see the device on my local network.
11:30:34:179 -> [WiFiEsp] Connected to xxxxx
11:30:34:215 -> You’re connected to the network
11:30:34:251 ->
11:30:34:251 -> IP Address: 192.168.54.36
11:30:34:280 -> 3C:E9:0E:E5:4D:44
11:30:34:301 ->
11:30:34:301 -> To see this page in action, connect to xxxxx and open a browser to http://192.168.54.36:8888
11:30:34:407 -> Listening on port 8888
Do you have a model for App inventor as a guide
what kind of model do you need?please email to [email protected]
Eu gostaria de replicar a app, mas estou com dificuldades. Criaram a app com o MIT Inventor; se sim, como?
Sorry, we don’t know the reason why you want to copy this APP?