In questo tutorial, ti diremo semplicemente come installare il sistema operativo Raspberry Pi per Raspberry pi e come utilizzare la console per controllare il raspberry pi. Useremo OSOYOO Servo Steer Smart Car per Raspberry Pi per fare alcuni semplici movimenti. Una volta completata l’installazione dell’auto, è molto importante testare l’installazione e il codice di esempio. Se hai superato il movimento di prova di questa lezione, significa che Raspberry pi, motori, batteria, scheda modello X, servomotore e connessioni di fili tra queste parti funzionano tutti bene e puoi passare ad altre lezioni di esempio
Se non completi il telaio dell’auto, rivedi la lezione 1
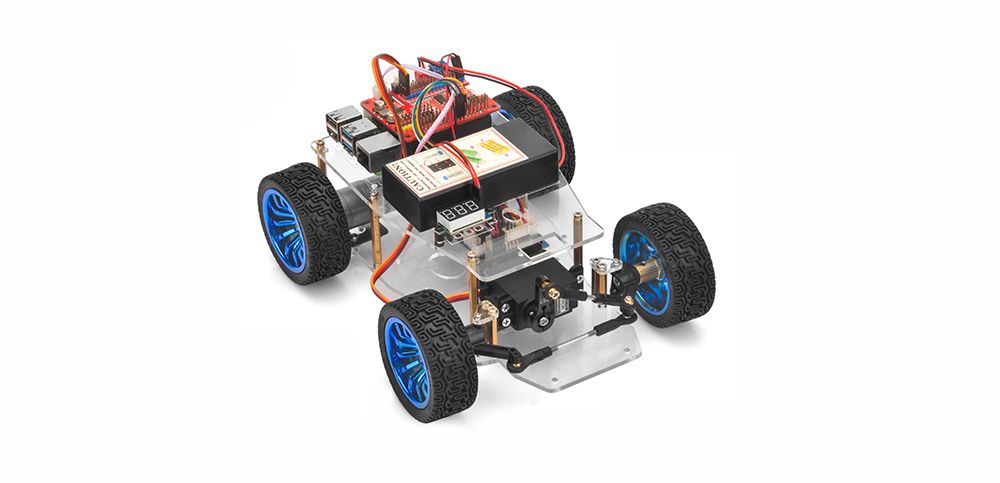
Servo Steer Smart Car per Raspberry Pi (con scheda raspberry pi) x1
Scheda Micro SD (più di 8GB) x1
Lettore di schede Micro SD x1
OSOYOO 5 pollici DSI touch screen per Raspberry Pi x1
Sistema operativo per questa auto robot:Raspberry Pi Legacy(buster). Si prega di notare che questo progetto di esempio di auto robot NON supporta Raspberry Pi New Bullseye OS. Quindi non commettere errori sul download del sistema operativo.
Ecco i passaggi per installare il sistema operativo Raspberry Pi Legacy: Passo 1: Scarica Raspberry Pi Buster Operation System (OS) e masterizzalo su scheda SD (salta questo passaggio se la tua scheda SD ha preinstallato Rpi Buster OS Image).
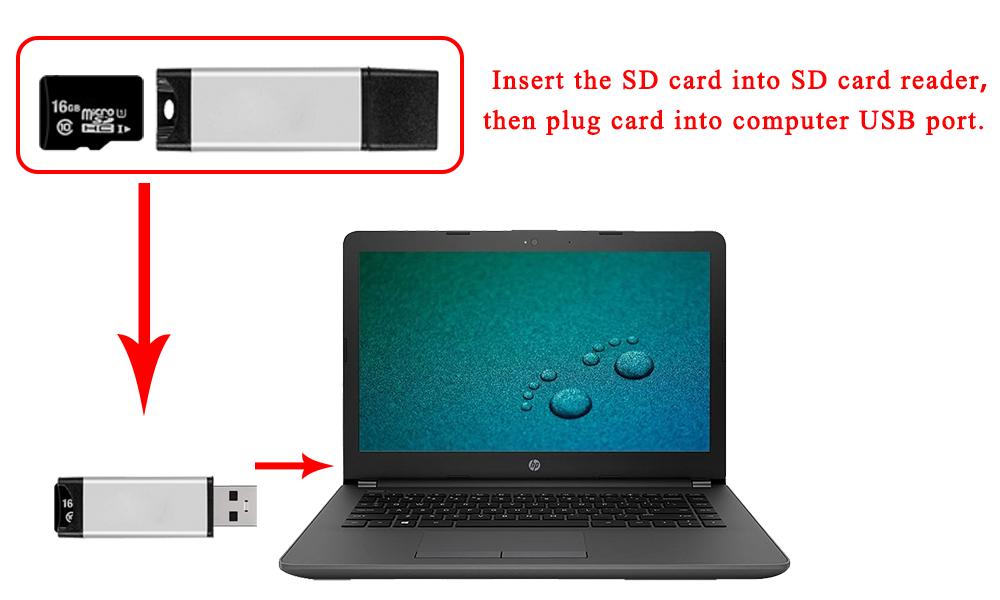
Preparare una nuova scheda Micro SD (più di 8GB) e inserirla nel lettore di schede micro SD USB, quindi collegare il lettore di schede micro SD USB al PC.
A. Utilizzo diretto della console
Nota: quando si utilizza direttamente la console è necessario un monitor dello schermo.
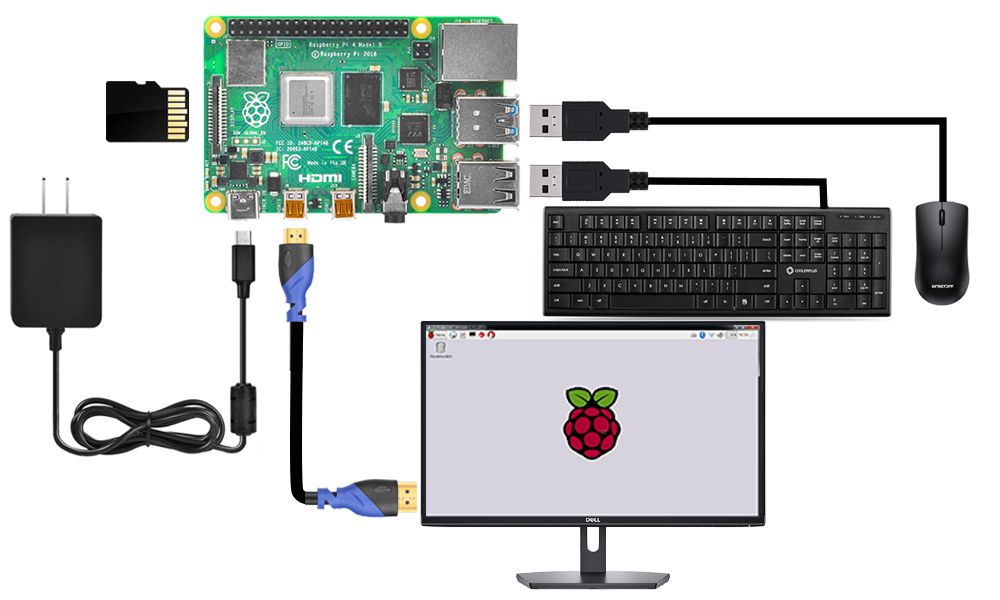
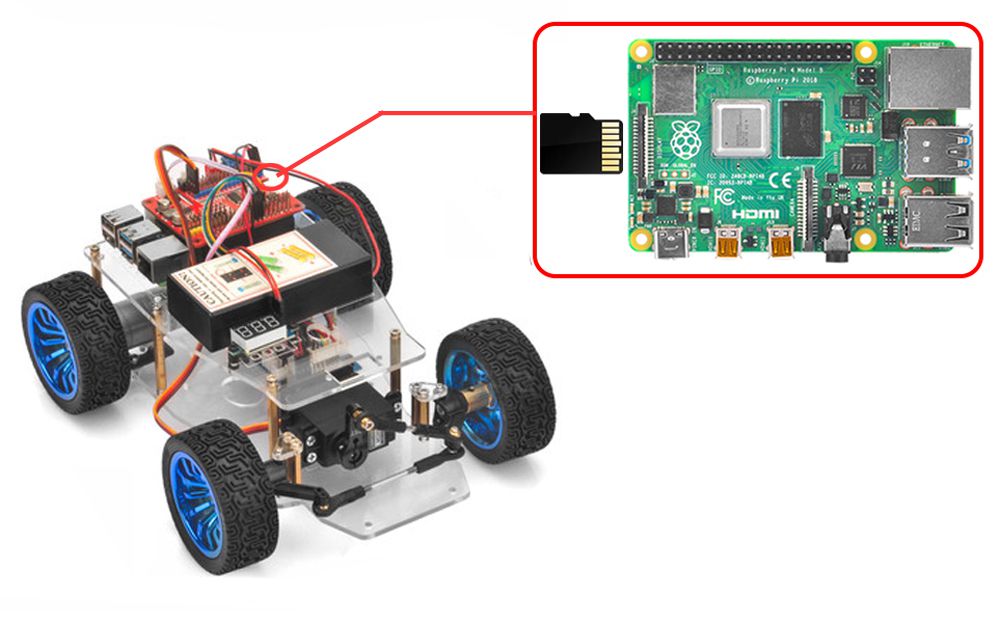
1. Collega Raspberry Pi al monitor o alla TV HDMI. Inserisci una tastiera e un mouse nelle porte USB di Raspberry Pi. Inserisci la scheda SD nello slot del tuo Raspberry Pi come segue:
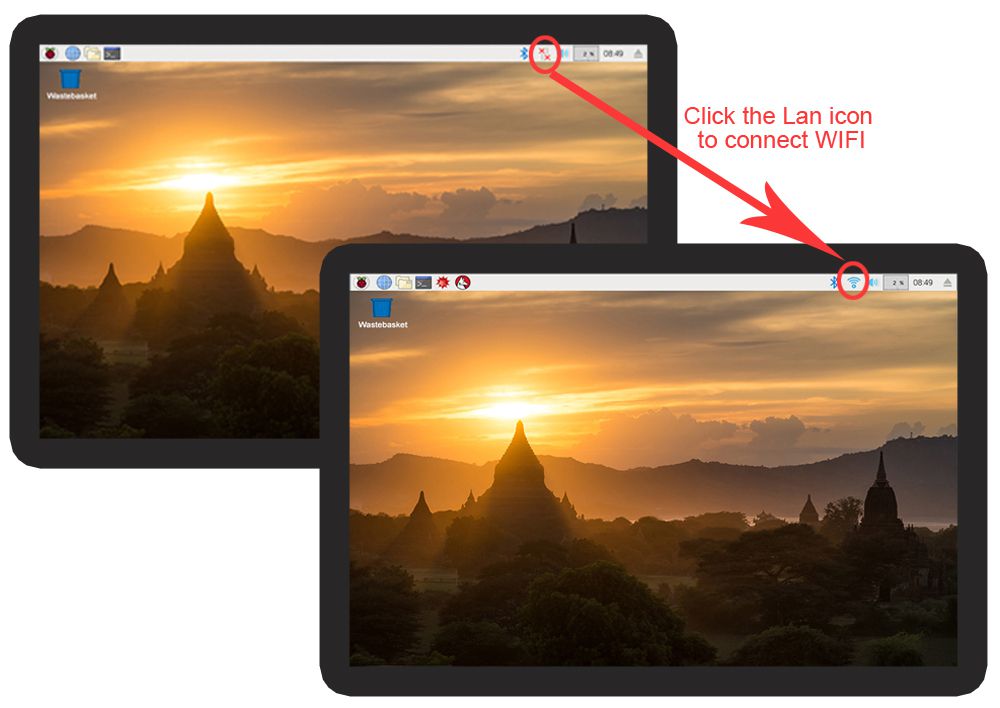
2. Fare clic sull’icona Lan nel conner in alto a destra e selezionare l’SSID WIFI e inserire la parola d’accesso del wifi per connettere l’hotspot wifi. Quindi puoi vedere la console a schermo intero.
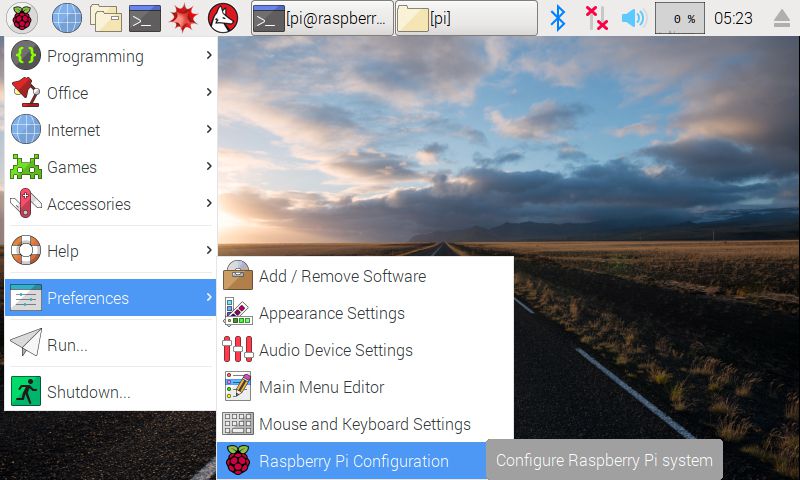
3. Se si sposta sull’icona Lan e viene visualizzato l’avviso come segue:
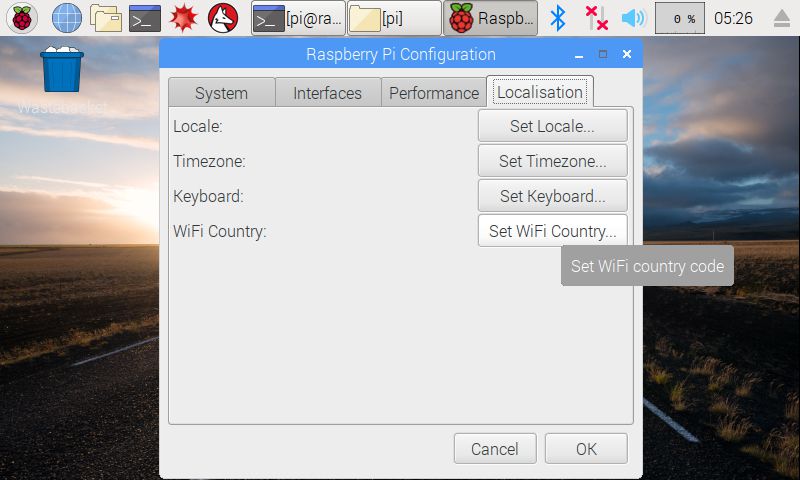
4. Fare clic su configura la localizzazione WIFI come segue:
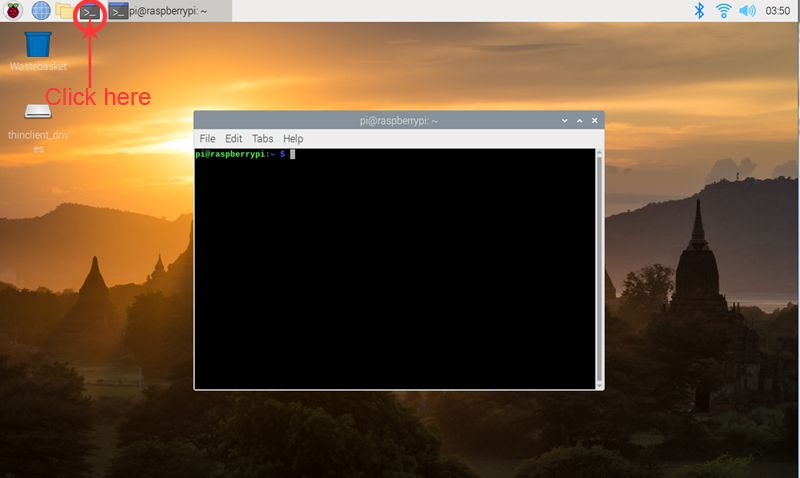
5. Fare clic sull’icona di Terminale sullo schermo o premere CTRL + ALT + T contemporaneamente, quindi verrà visualizzato un terminale come segue:
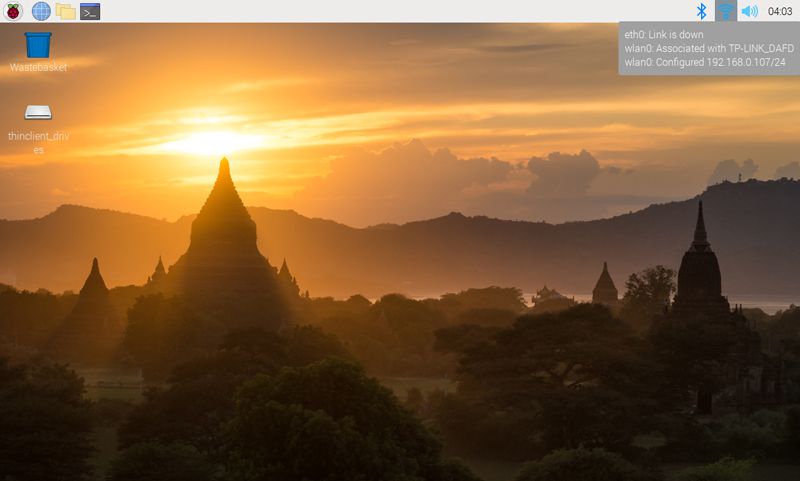
6. Scopri l’indirizzo IP dell’RPi. Metodo A: collega il tuo Pi al monitor e al mouse, fai clic sull’icona LAN o WIFI per ottenere l’indirizzo IP come nella foto seguente
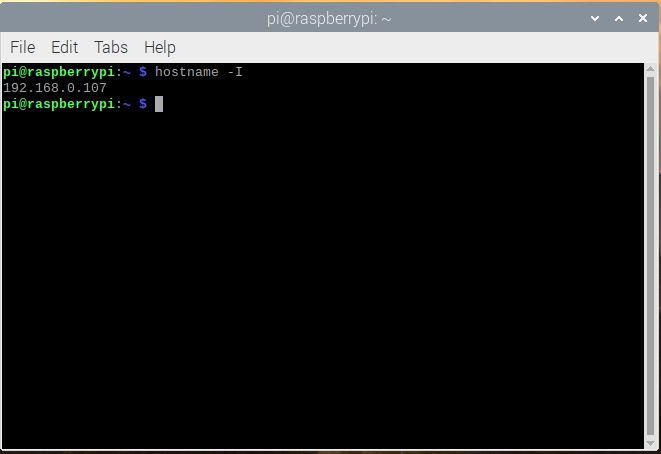
Metodo B: è anche possibile trovare l’indirizzo IP digitando il comando del terminale:
hostname -I
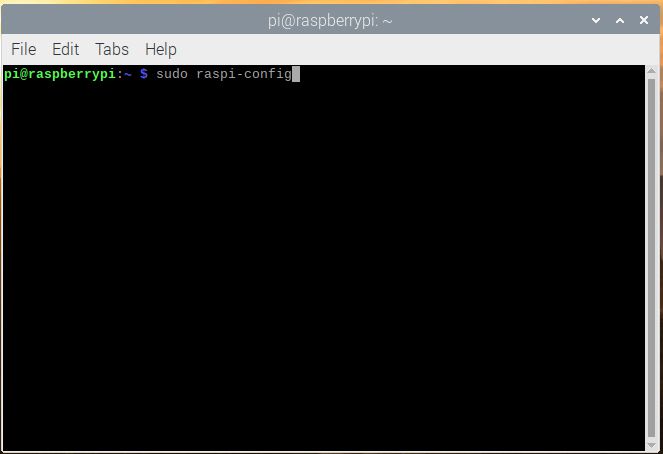
7. Abilita SSH
Digitando il comando del terminale :
sudo raspi-config
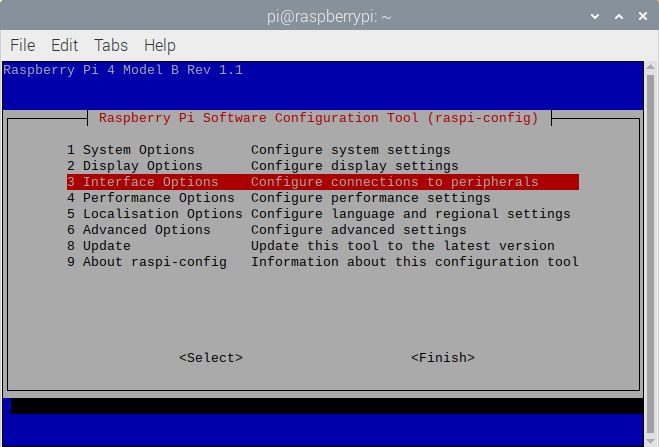
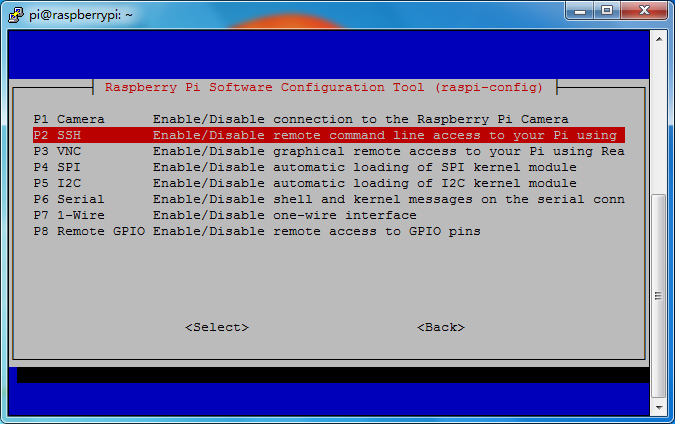
Vai al menu di configurazione, vai su Interface Options ->SSH -> Select -> Yes ->Finish (Nota: si prega di utilizzare “frecce” sulla tastieraper posizionare il cursore dove si desidera andare e premere “invio” per confermare la selezione)
B. Utilizzo della console in remoto
Nota: per la versione 2016-11-25 o successiva, SSH (un protocollo che protegge la sessione di accesso remoto e altri servizi di rete) è disabilitato per impostazione predefinita. Pertanto, quando è necessario accedere in remoto, è necessario abilitare prima ssh.
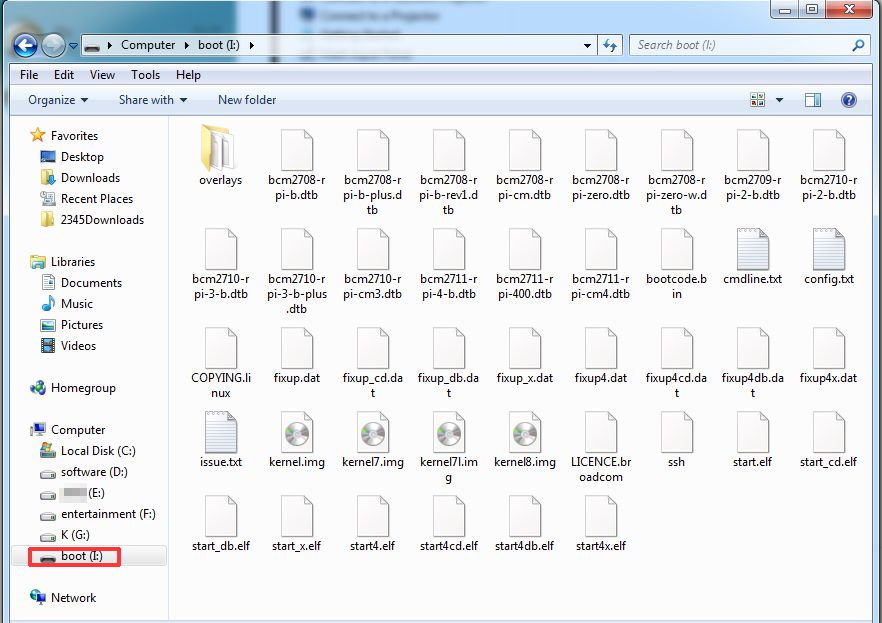
1. Inserire la scheda Micro SD che viene masterizzata con Raspberry Pi OS nel lettore di schede micro SD USB e collegare il lettore di schede micro SD USB al PC.
2. Apri questa scheda micro SD nel tuo computer
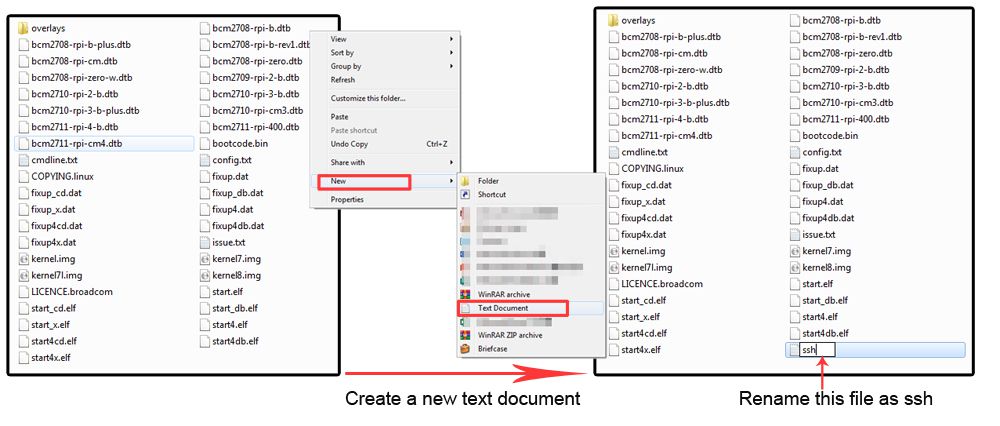
3. Crea un txt. e rinominato “ssh” sotto /boot/ per abilitarlo.
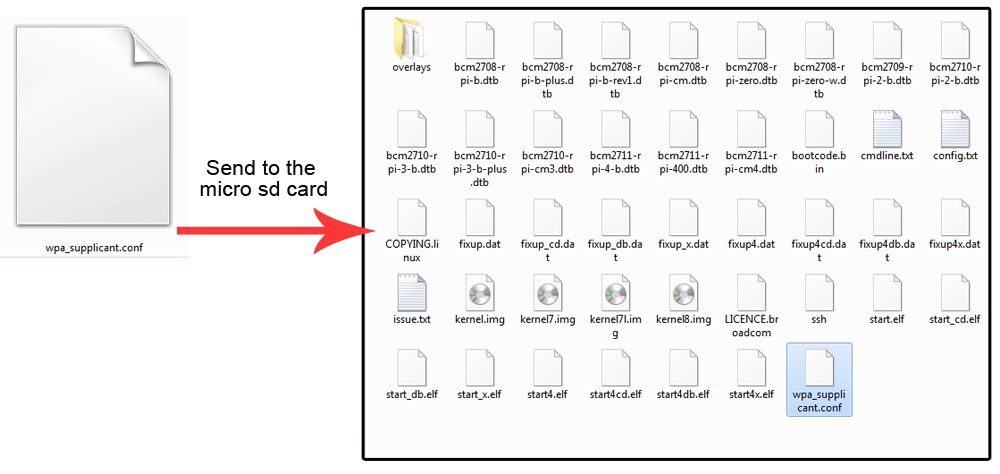
4. Scaricare il file “wpa_supplicant.conf” e quindi utilizzare Notepad ++ per aprire questo file, e modificare l’SSID e PSK sul proprio SSID wifi e password e salvare questo file:
5.Inviare il file “wpa_supplicant.conf” dal PC alla scheda micro SD
6. Collegare la scheda MicroSD al Raspberry Pi e quindi accendere il Raspberry Pi.
7. Accedi al router WIFI e controlla l’indirizzo IP del tuo Raspberry Pi (oppure puoi utilizzare alcune APP di scansione dell’indirizzo IP per scansionare l’indirizzo IP)
8. Utilizzare lo strumento ssh per controllare Raspberry Pi da remoto
Nota: per tre piattaforme: Windows, Mac e Linux, potrebbe essere un po ‘diverso farlo.
(1) Gli utenti Linux e Mac possono facilmente accedere al Raspberry Pi tramite ssh. Su Linux o Mac, trova Terminale e aprilo.
Digitare ssh pi@IP indirizzo (ssh è lo strumento per il login remoto; pi è il nome utente e, come suggerisce il nome, l’indirizzo IP dell’RPi) e quindi premere Invio per confermare. Ad esempio:
ssh [email protected]
Se ricevi un messaggio che non viene trovato ssh, devi installare uno strumento ssh come Ubuntu e Debian da solo:
sudo apt-get install ssh
(2) Per gli utenti Windows, è possibile utilizzare uno strumento ssh per accedere a Raspberry Pi da remoto, come PuTTY.
Passo 1. Scarica PuTTY da: https://www.chiark.greenend.org.uk/~sgtatham/putty/ e installa questo exe. nel tuo PC Windows
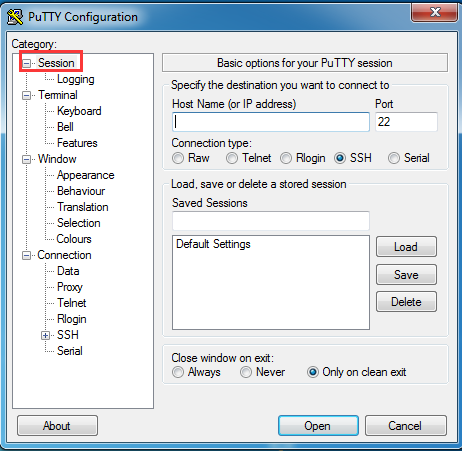
Passo 2. Apri PuTTY e fai clic su Sessione sulla struttura ad albero a sinistra (generalmente è collassata all’avvio di PuTTY):
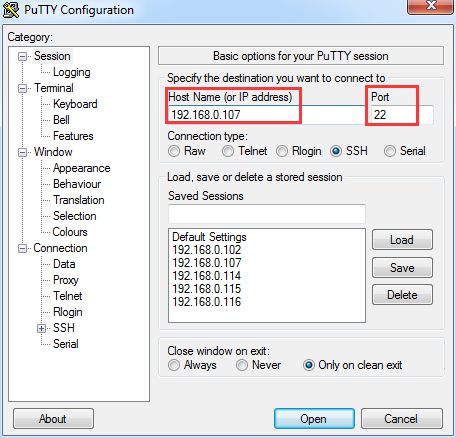
Passo 3. Inserisci l’indirizzo IP che hai ottenuto nella casella di testo sotto Nome host (o indirizzo IP) e 22 sotto Porta (per impostazione predefinita è 22), quindi fai clic su Apri.
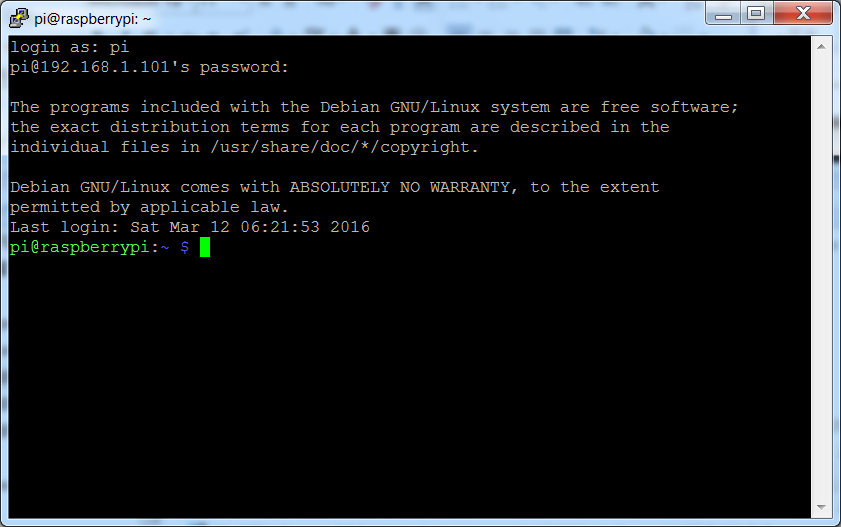
Passo 4. Si noti che quando si accede per la prima volta a Raspberry Pi con l’indirizzo IP, verrà richiesto un promemoria di sicurezza. Basta fare clic su Sì. Quando la finestra PuTTY richiede login come: digitare il nome utente: pi greco, e password: raspberry (quello predefinito, se non l’hai modificato). Nota: quando stai digitando la password, la finestra non mostra nulla di nullo, ma in realtà stai digitando le cose. Quindi concentrati sulla digitazione giusta e premi Invio. Dopo aver effettuato correttamente l’accesso all’RPi, la finestra verrà visualizzata come segue:
Per altre piattaforme, contatta il tuo fornitore.
Dopo aver appreso come installare Raspberry Pi OS e utilizzare la console di Raspberry Pi, è possibile seguire i passaggi successivi per testare il telaio dell’auto robot nella lezione1.
Nota: nelle nostre lezioni di esempio, usiamo PC Windows come dispositivo console remota e PuTTY come strumento ssh
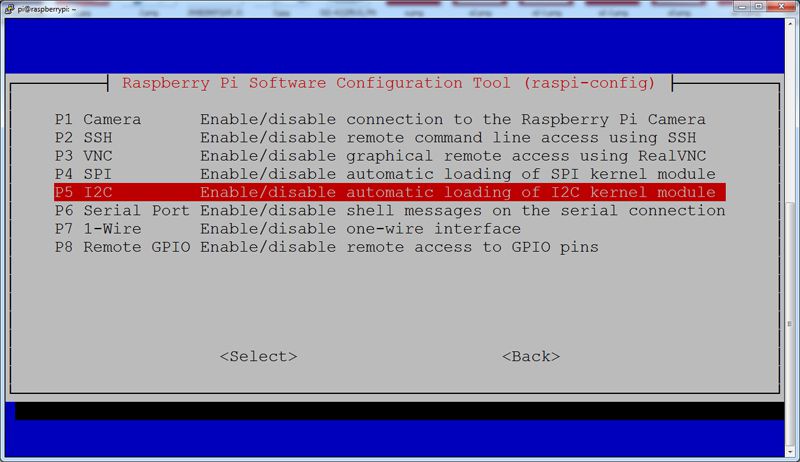
Passo 1: Accendi l’auto ed esegui il seguente comando e abilita I2C (I2C è un protocollo che verrà utilizzato per scambiare dati con il dispositivo I2C)
sudo raspi-config
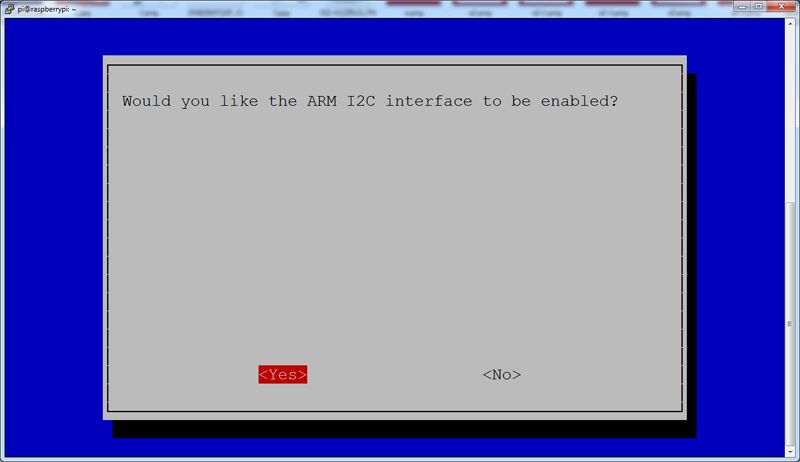
Quindi selezionare Interface Options->I2C->Select->Yes->Finish
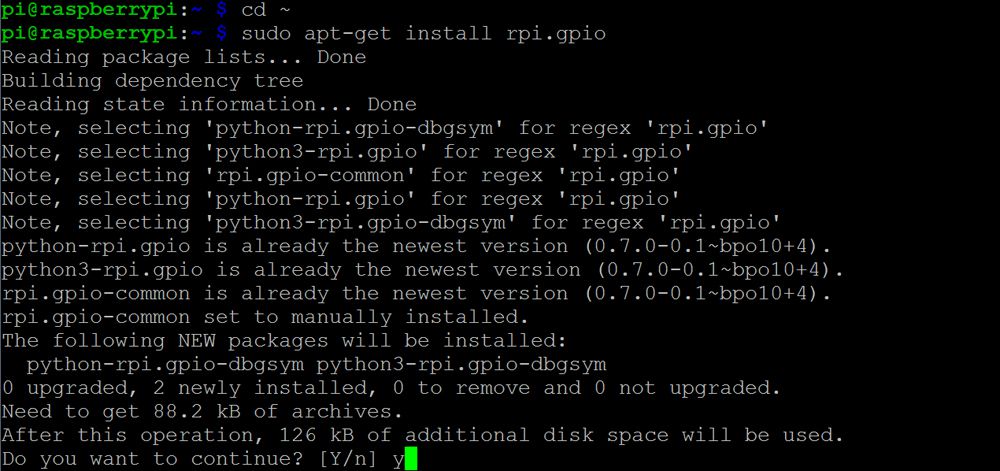
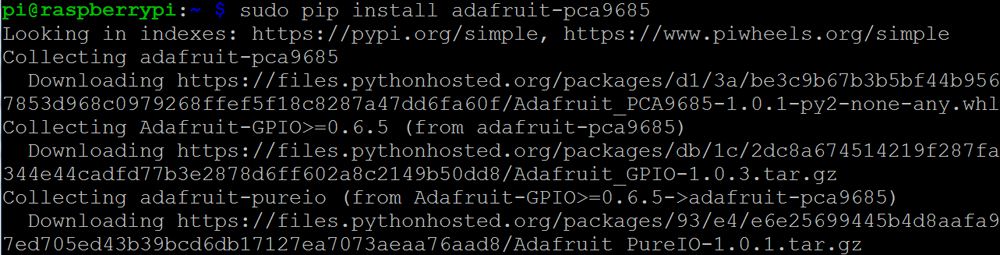
Passo 2: installare GPIO e la libreria PWM pca9685 eseguendo i seguenti tre comandi:
cd ~ sudo apt-get install rpi.gpiosudo pip install adafruit-pca9685
Nota: supponiamo che tu stia utilizzando l’ultimo sistema operativo Raspbian che viene fornito con pip e Flask, se stai utilizzando altri sistemi operativi, ti preghiamo di google solution per installare prima pip e Flask
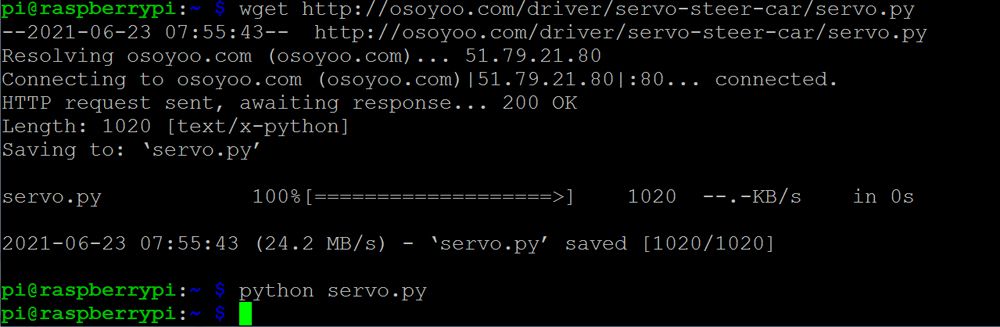
Passo 3: Eseguire i seguenti due comandi per trovare il valore anteriore del servo :
Passo 4: Se il servosterzo non è rivolto verso la direzione anteriore centrale, sono disponibili due opzioni:
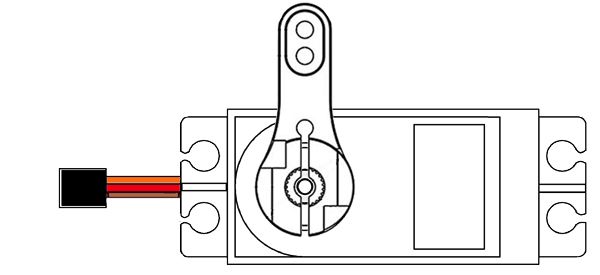
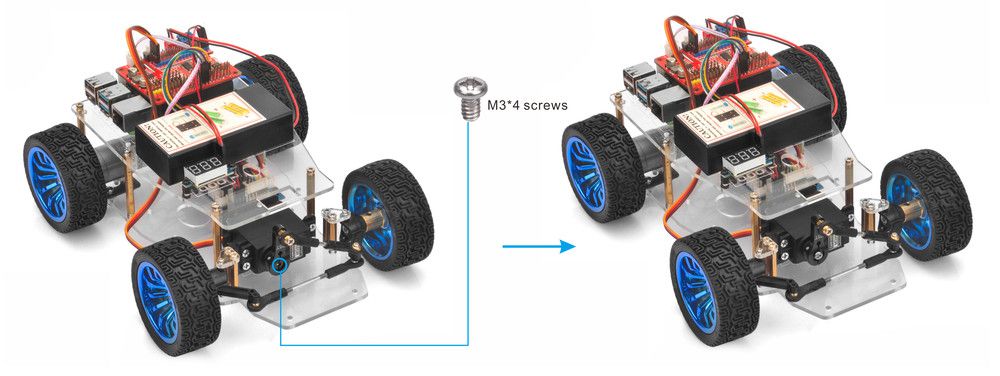
Opzione 1 ) Spegnere l’alimentazione e rimuovere la tromba dal servomotore. Installare il braccio come illustrato di seguito. e quindi installare le viti M3 * 4 al centro del corno per fissare il corno.
Opzione 2) Installare le viti M3 * 4 al centro del corno per fissare il clacson e inserire il seguente comando nel terminale:
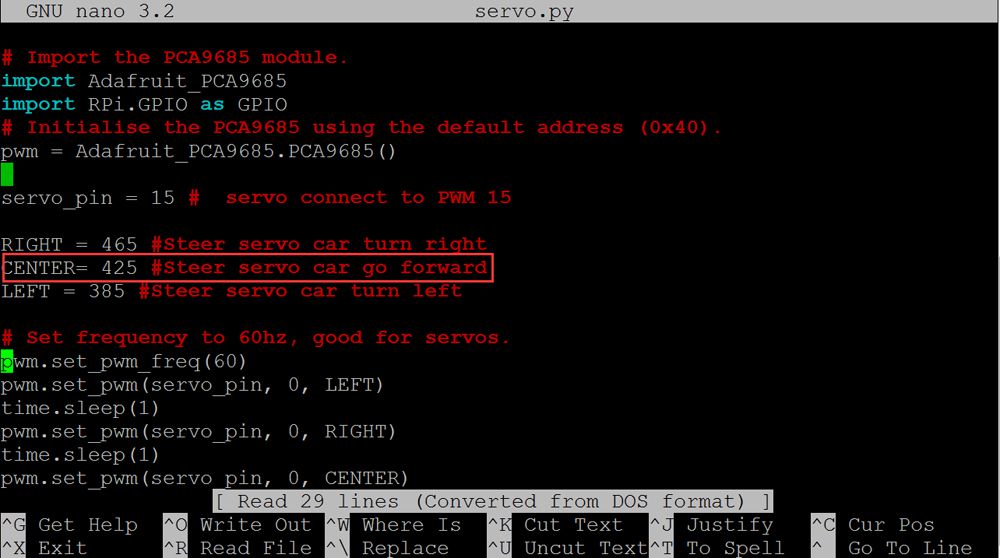
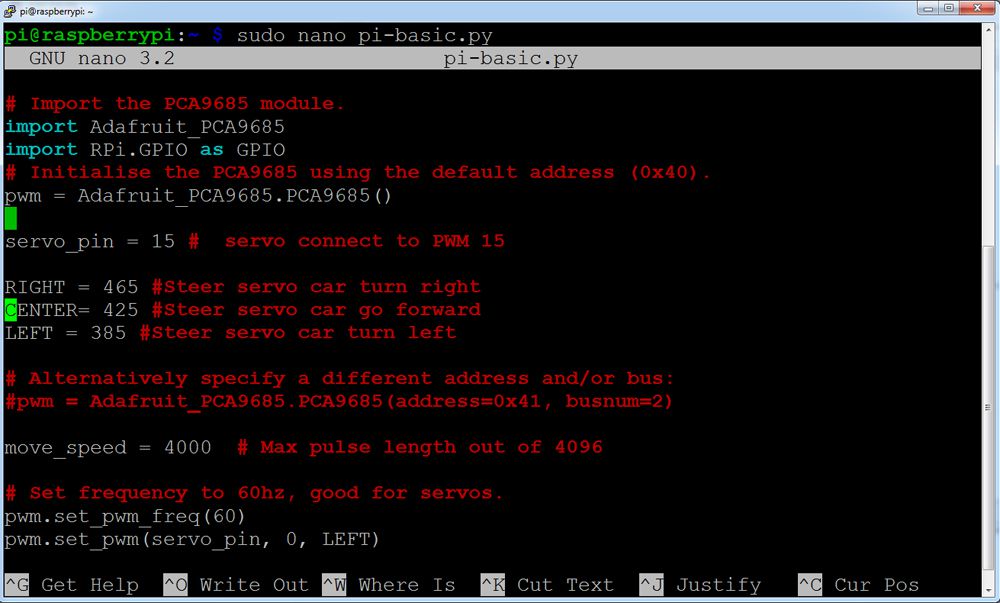
sudo nano servo.py
È possibile modificare il valore predefinito della riga 20
CENTER= 425 #Steer servo car go forward
Se il tuo volante tende a sinistra, aumenta il valore da 425 a 430, 435, 440 …
Se il tuo volante tende a destra, diminuisci il valore da 425 a 420, 415, 410 …
Quindi fare clic su “ctrl” + “x”, quindi su Y per salvare questo file ed eseguire nuovamente il comando: python servo.py. Ripeti questi passaggi fino a quando il tuo volante è finalmente rivolto verso la parte anteriore e annota questo valore per modificare il codice della lezione2,3,4,5,6 e rendere il servosterzo sempre rivolto verso la parte anteriore al valore
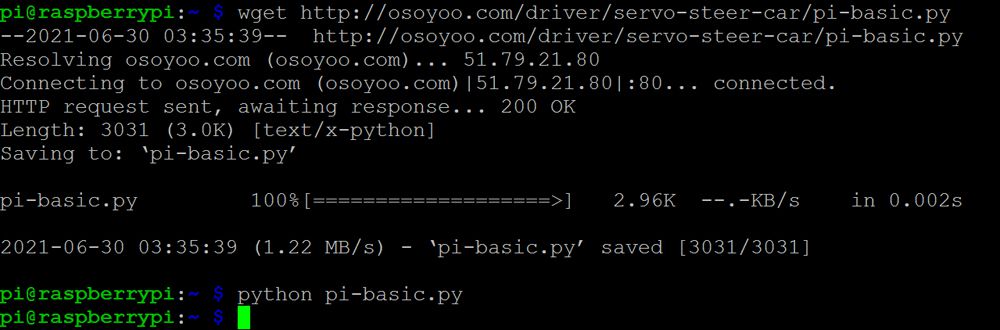
ANTERIORE predefinito 1. Alimenta l’auto e digita i seguenti due comandi nel terminale:
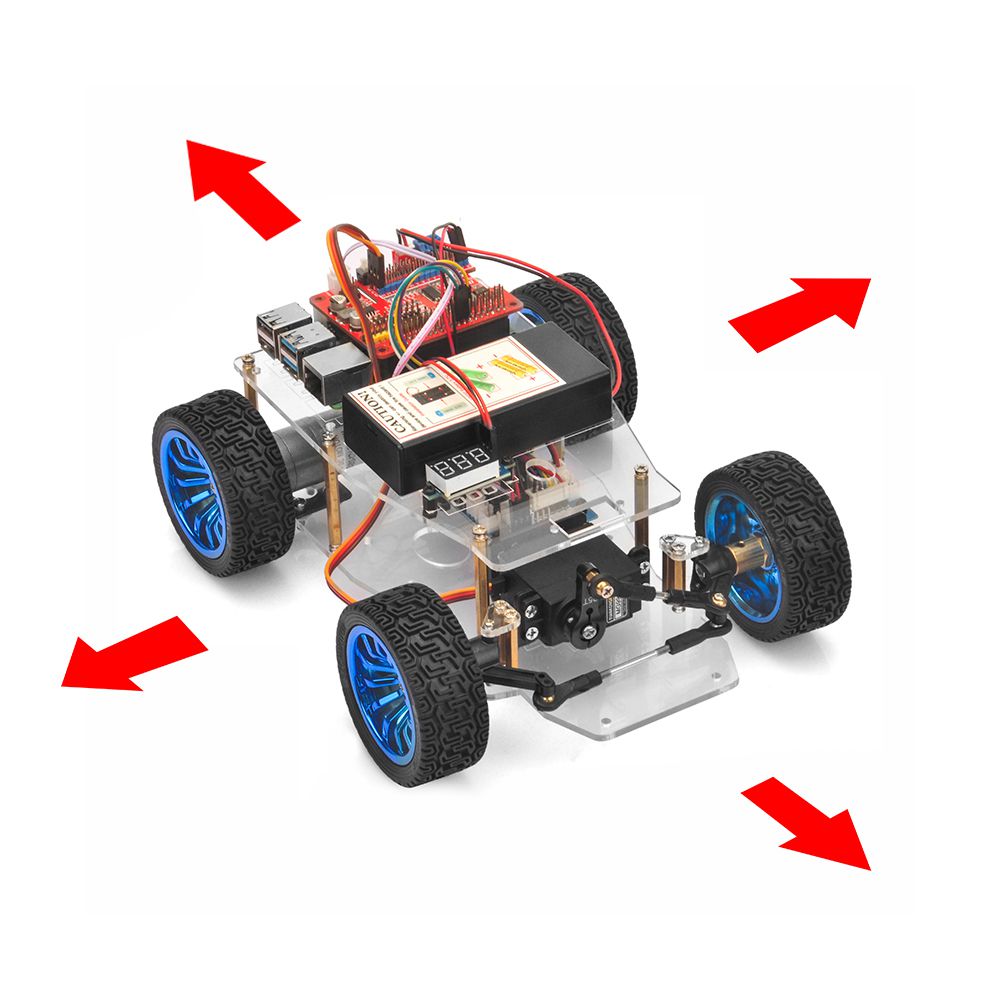
2. Dopo che sopra python è in esecuzione, i motori si muoveranno in avanti e poi si sposteranno indietro, e gireranno a sinistra per poi girare a destra, poi di nuovo a destra e infine di nuovo a sinistra.
3. Eseguire il seguente comando per modificare il valore predefinito 425 nella riga 20 come valore FRONT. Se si allinea manualmente la direzione della ruota, saltare questo passaggio.
sudo nano pi-basic.py
È possibile scaricare il codice python di esempio da https://osoyoo.com/driver/p3-car/v3car-basic.py e leggerlo tramite Notepad ++. Se si dispone di alcune conoscenze di base di Python, è possibile capire facilmente come personalizzare il codice per la propria applicazione.


















 3. Se
3. Se 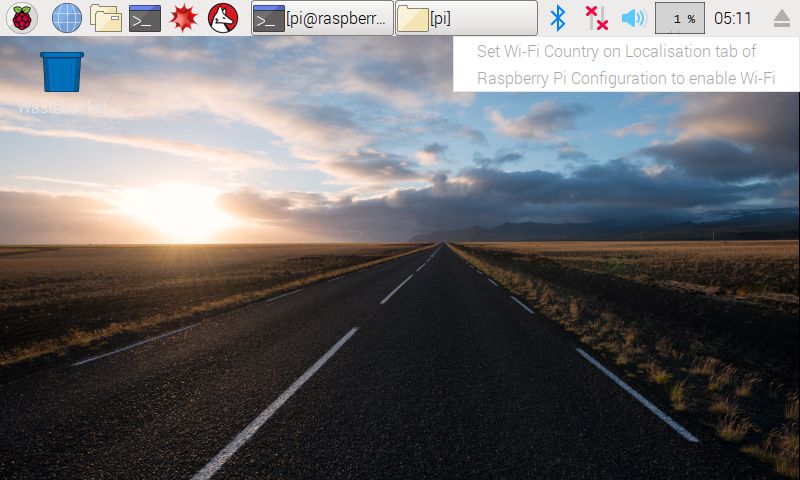



 Dopo aver appreso come installare Raspberry Pi OS e utilizzare la console di Raspberry Pi, è possibile seguire i passaggi successivi per testare il telaio dell’auto robot nella lezione1.
Dopo aver appreso come installare Raspberry Pi OS e utilizzare la console di Raspberry Pi, è possibile seguire i passaggi successivi per testare il telaio dell’auto robot nella lezione1.