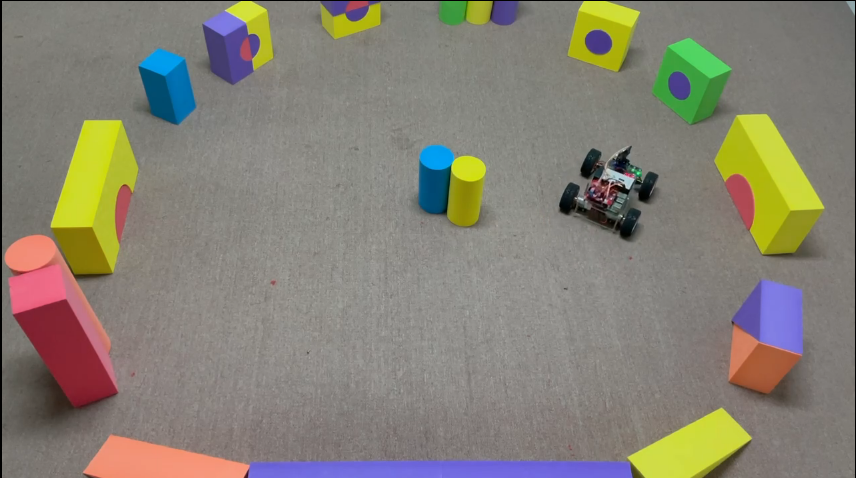
In questa lezione, la nostra auto robotica Raspberry Pi utilizzerà un sensore ad ultrasuoni per rilevare gli ostacoli e guidare in modo automatico evitando le collisioni.
Passo 2: Installa il motore servo nella parte anteriore del telaio superiore dell’auto con 2 viti autofilettanti M2.2*8.
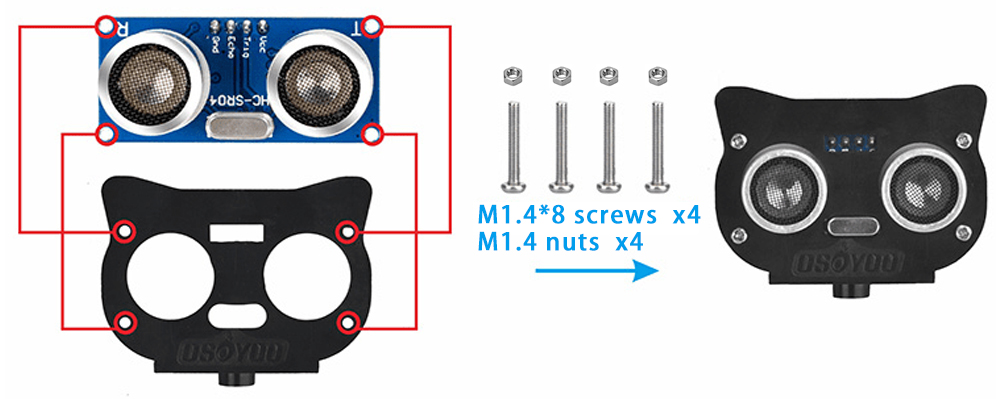
Passo 3: Installa il modulo ad ultrasuoni sul supporto di montaggio con 4 viti M1.4*8 e dadi M1.4.
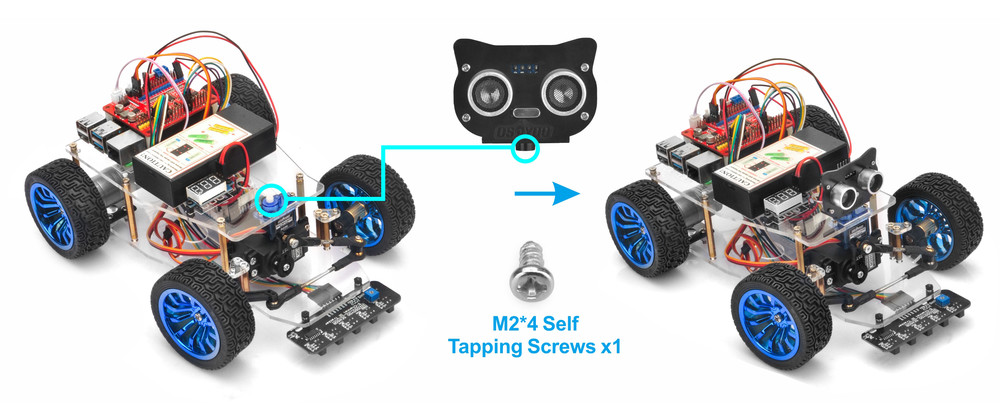
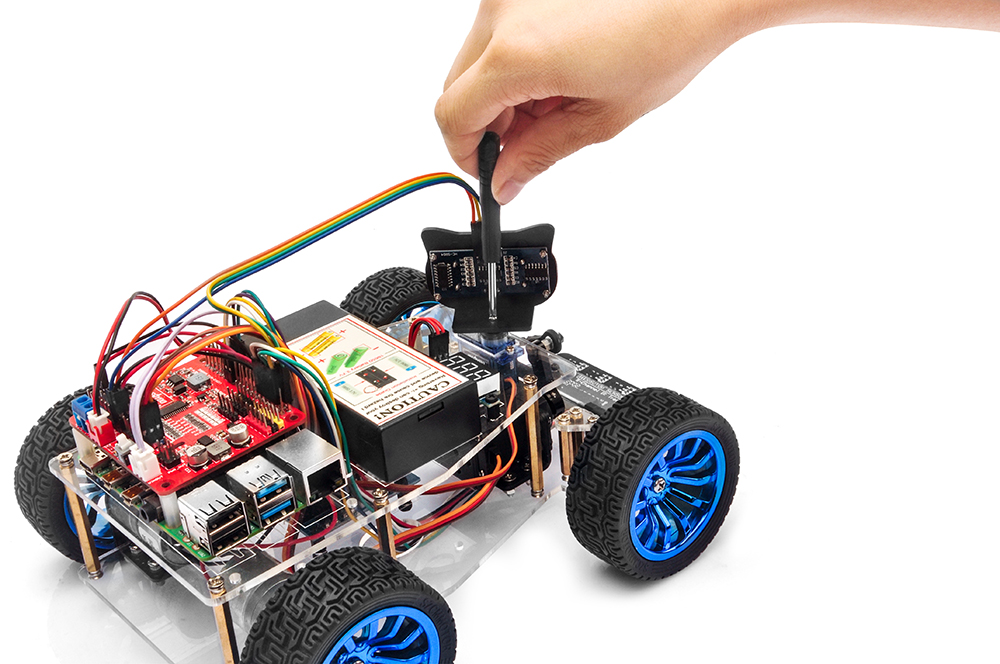
Passo 4: Installa il supporto ad ultrasuoni sul micro motore servo con 1 vite autofilettante M2*4.
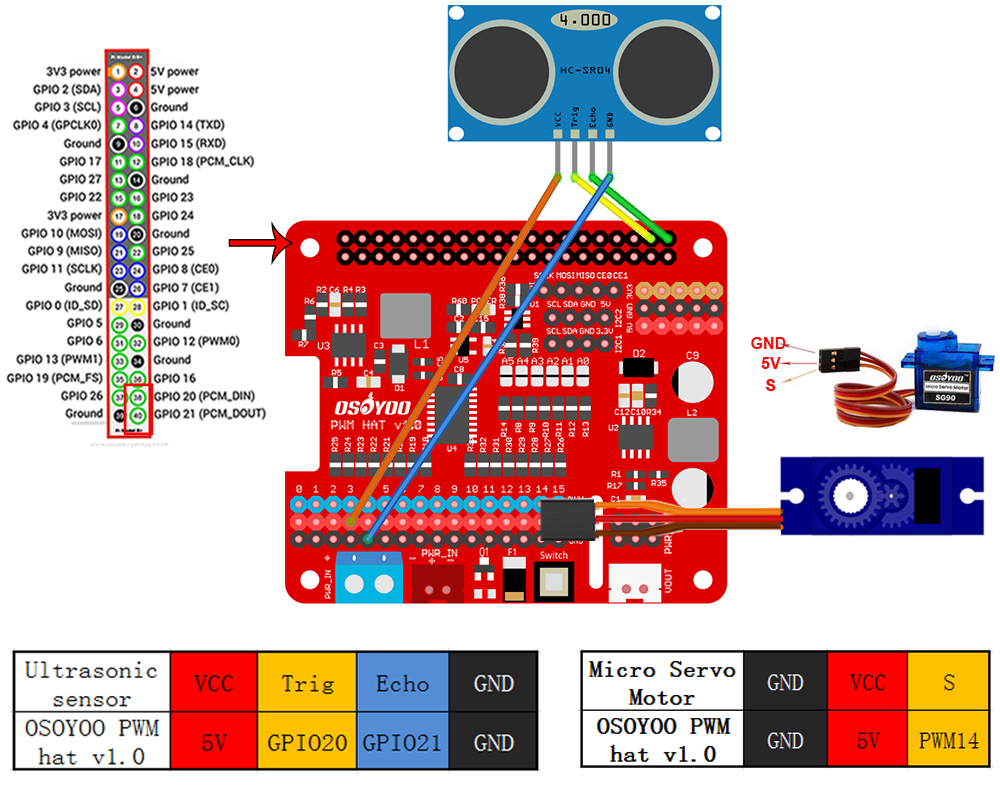
Collega il supporto del sensore ad ultrasuoni al motore servo SG90 alla porta PWM 14 della scheda OSOYOO PWM HAT e collega GND e VCC del modulo ad ultrasuoni a GND e 5V della scheda OSOYOO PWM HAT, quindi collega TRIG e ECHO del modulo ad ultrasuoni a GPIO20 e GPIO21 del Raspberry Pi come mostrato nel seguente diagramma (Ricorda: NON rimuovere i cavi esistenti installati nella Lezione 1):
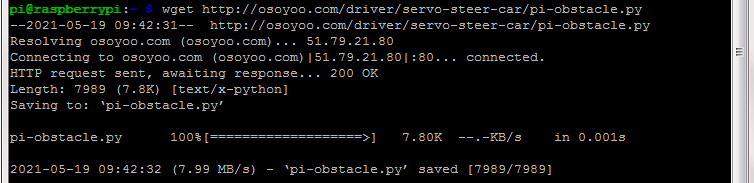
Scarica il codice Python digitando il seguente comando nel terminale del tuo Raspberry Pi:
Accendi la batteria della tua auto e del tuo servo e avvia il programma,
Se stai utilizzando Python 2 su Raspberry Pi, digita:
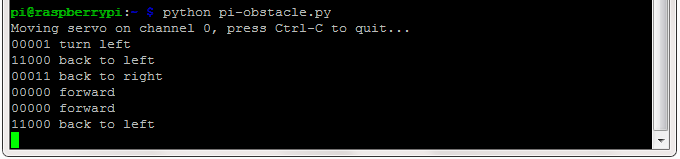
python pi-obstacle.py
Il tuo servo ruoterà il sensore ad ultrasuoni in posizione frontale per 3 secondi. Se il tuo sensore non è rivolto in direzione frontale, spegni la batteria o premi il tasto Ctrl-C per interrompere il programma. Quindi rimuovi il sensore dal servo e reinstallalo, assicurandoti che sia rivolto in avanti e fissando la posizione con la vite. Ora puoi digitare lo stesso comando python pi-obstacle.py e avviare nuovamente il programma.
Ora l’auto effettuerà automaticamente una guida autonoma evitando gli ostacoli.