Mecanum Wheel Robot Car Full Package (with 18650 batteries)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
The above robot cars are controlled by Arduino. If you have Raspberry Pi board, actually the robot car can also be controlled by Raspberry Pi. You can visit the following link to learn basic movement with Raspberry Pi.
link- https://osoyoo.com/?p=31428
In questo progetto, collegheremo l’auto robotica Mecanum al Wi-Fi e utilizzeremo un’APP per controllare l’auto tramite Internet. Questa è una tipica applicazione Internet of Things (IoT).
OSOYOO Ruote Mecanum telaio per auto robotica x 1 (2x ruote sinistre / 2x ruote destre e motore x 4)
Scheda OSOYOO Mega2560, completamente compatibile con la scheda Arduino MEGA2560 x 1
Schermatura Wi-Fi OSOYOO x 1
Driver del motore OSOYOO modello Y x 1
Servomotore OSOYOO MG90 x 1
Modulo sensore ad ultrasuoni OSOYOO x1
OSOYOO Supporto per montaggio ad ultrasuoni
OSOYOO Modulo sensore di tracciamento a 5 punti
OSOYOO ponticello da 3 pin femmina a femmina x1
OSOYOO 6 pin maschio a ponticello femmina x2
OSOYOO ponticello da 7 pin femmina a femmina x1
OSOYOO 2 pin XH.25 da femmina a femmina x1
Scatola batteria OSOYOO x 1
18650 batterie (3,7 V) x 2
If you just finish all lesson 1 (assembling the car) and lesson 4 (Bluetooth imitation driver), please keep all lesson connections same as it is. Then plug out Bluetooth from Wi-Fi Shield.
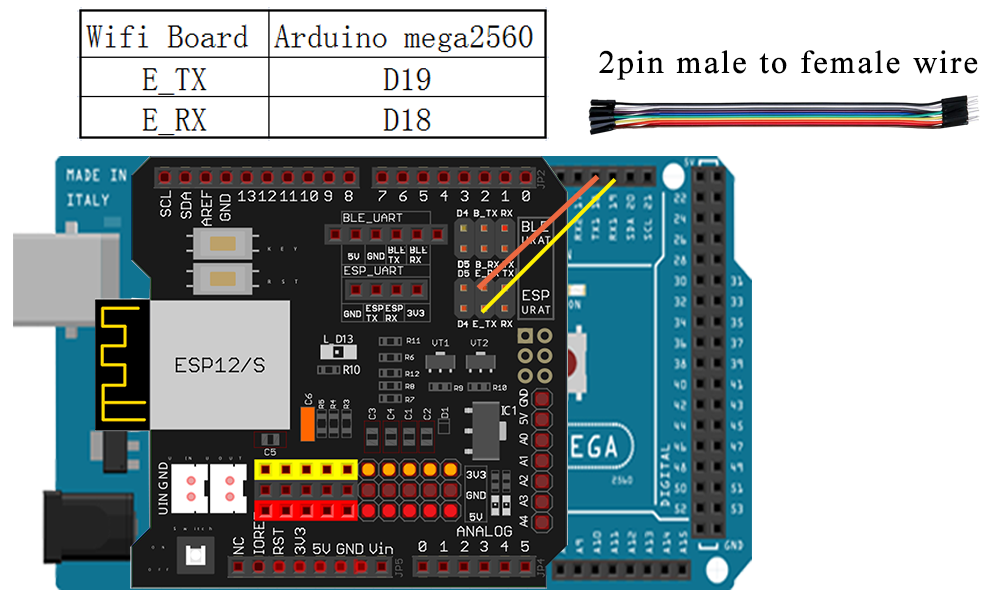
Passaggio 1. Rimuovere la connessione B_TX a D18 e B_RX a D19.
Passaggio 2. Collegare E_RX a D18(TX1) e E_TX a D19(RX1).
(Nota: è necessario dividere 2 pezzi di cavi jumper maschio-femmina dal nostro fascio di cavi jumper da 10 pezzi. Qualsiasi colore del pacchetto andrà bene. Il resto dei fili da 8 pezzi sono pezzi di ricambio per potenziali fili rotti o danneggiati.)
Passaggio 1: installare l’ultimo IDE di Arduino (se si dispone di una versione dell’IDE di Arduino successiva alla 1.1.16, saltare questo passaggio). Scarica Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installare il software.
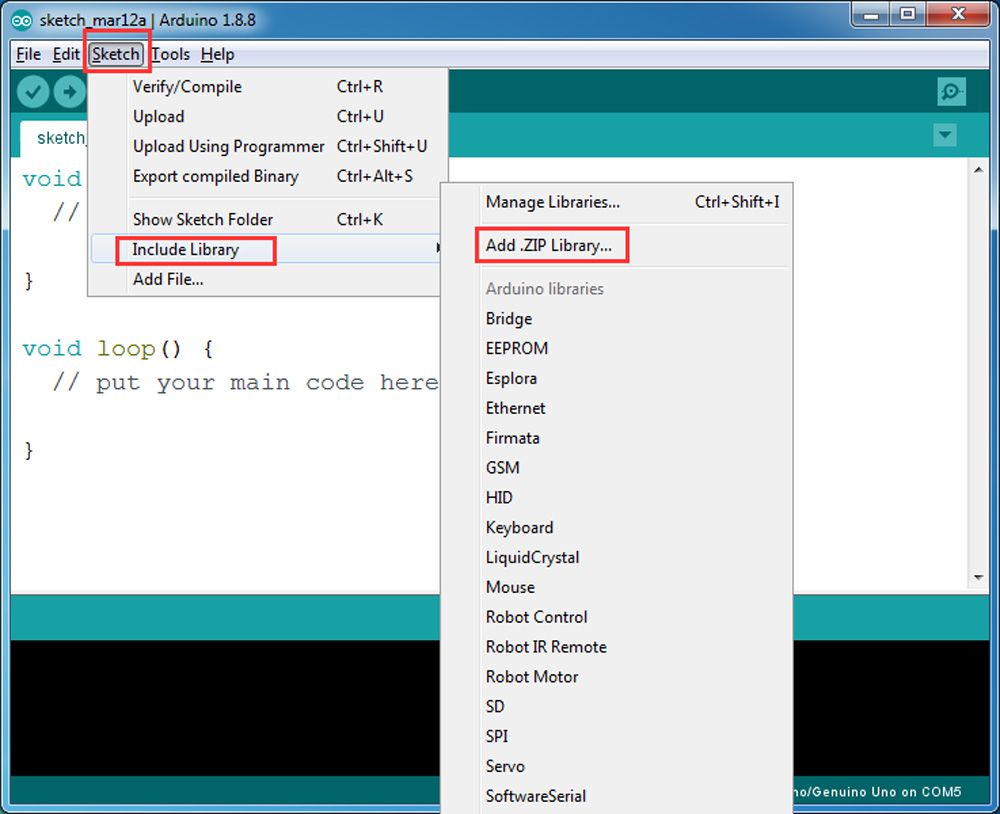
Passaggio 2: scaricare il file zip della libreria da WiFiEsp-master.zip. Apri l’IDE di Arduino → fai clic su Schizzo → Includi libreria → Aggiungi libreria .ZIP, quindi carica sopra il file zip in Arduino.
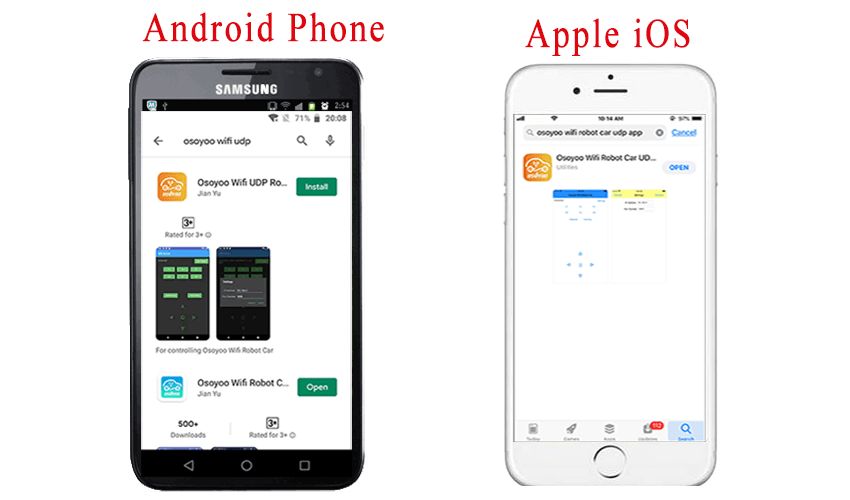
Passaggio 3: installazione dell’APP: è necessario cercare “OSOYOO Wi-Fi UDP Robot Car Controller” in Google Play o Apple Store, quindi installare questa APP.
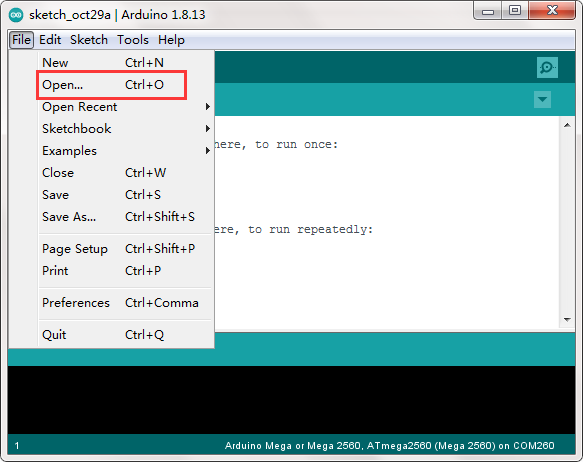
Decomprimi il file scaricato, entra nella cartella m2-lesson5, vedrai due sottocartelle : m2-lesson5A and m2-lesson5B
Queste due cartelle hanno un programma per due modalità Wi-Fi: modalità AP e modalità STA. Gli schizzi di Arduino per queste due modalità sono diversi. Spieghiamo queste due modalità una per una.
Quando si lavora in modalità AP, la nostra stessa auto robotica diventerà un hot spot Wi-Fi. Il nostro telefono cellulare può connettersi a Robot Car come client Wi-Fi. L’indirizzo IP di Robot è fisso su 192.168.4.1. In tale situazione, sia l’auto robotica che il telefono cellulare non sono collegati alla WAN.
(1) Decomprimi il file m2-lesson5 e vedrai una cartella chiamata m2-lesson5a, carica il codice in Arduino.
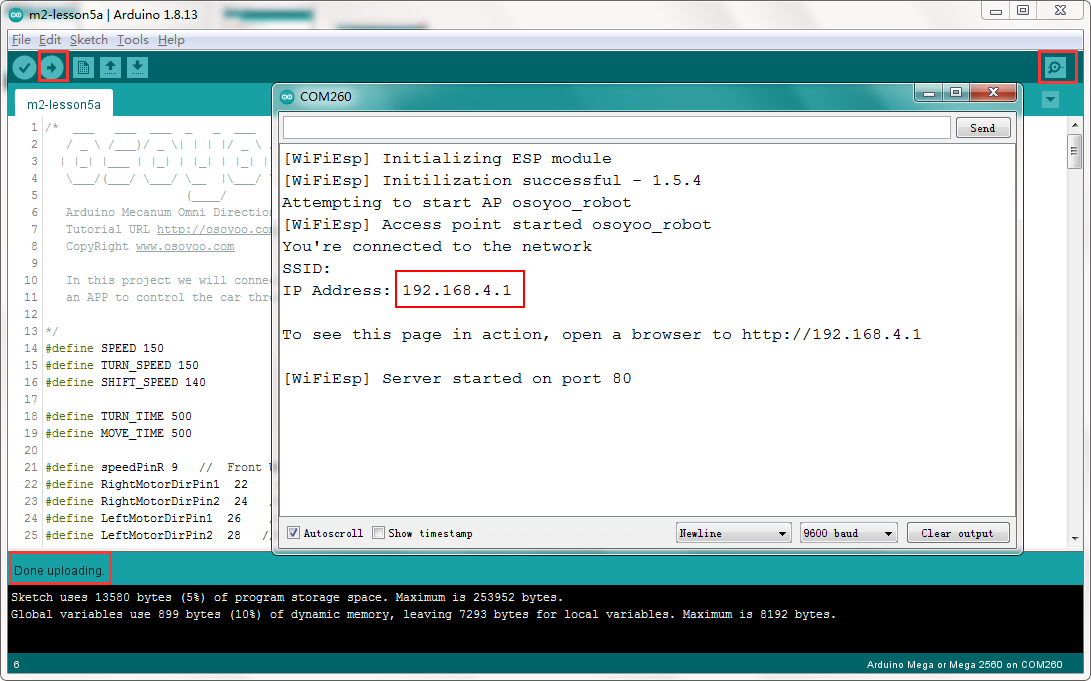
(2)Apri il tuo monitor seriale Arduino e vedrai un risultato simile alla modalità AP. Nella finestra verrà visualizzato un nuovo SSID Wi-Fi “osoyoo_robot” con indirizzo IP 192.168.4.1. Ciò significa che la tua auto robot ha un nome hot spot Wi-Fi “osoyoo_robot”, il suo indirizzo IP è 192.168.4.1
(3)Ora la tua auto robot diventa un hot spot Wi-Fi e imposta l’indirizzo IP come “192.168.4.1” nella sezione Impostazioni APP.
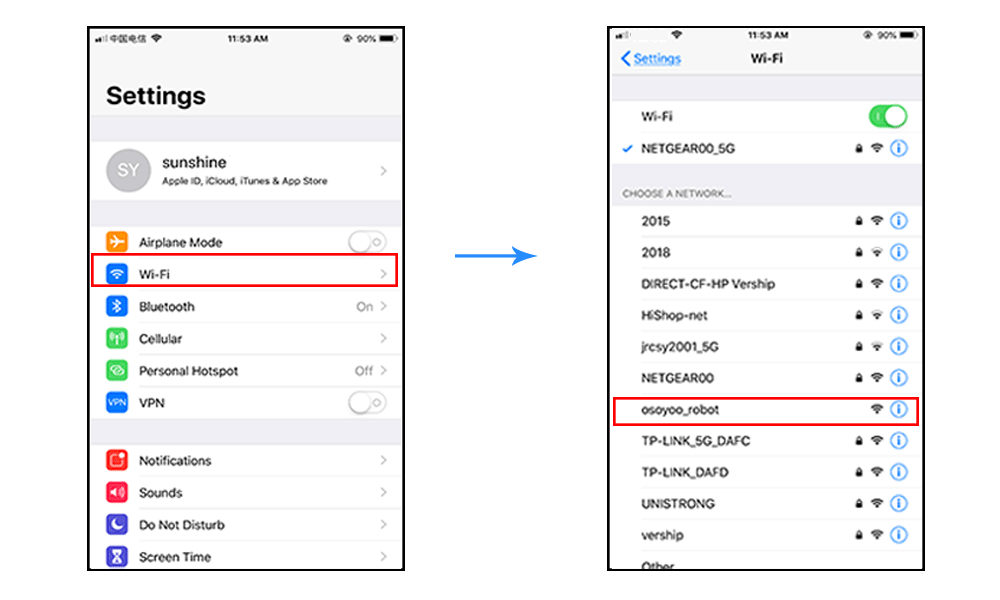
(4)Collega il tuo telefono cellulare all’hot_spot Wi-Fi “osoyoo_robot” e puoi utilizzare il telefono cellulare per controllare l’auto del robot.
(5)Puoi fare clic sui tasti di direzione ◄ ► ▲ ▼ per far muovere l’auto. Usa “||” tasto pausa per fermare il movimento della macchina.
Fai clic su Ostacolo per spostarti sul lato sinistro, fai clic su Tracciamento per spostarti sul lato destro.
Fare clic su F1 per eseguire il movimento diagonale in alto a sinistra, fare clic su F3 per eseguire il movimento diagonale in alto a destra
Fare clic su F4 per eseguire il movimento diagonale indietro-sinistra, fare clic su F6 per eseguire il movimento diagonale indietro-destra.
In modalità STA, l’auto robotica non funziona come hotspot Wi-Fi. Invece, diventerà un nodo Internet nella tua LAN. Devi dire ad Arduino sketch qual è l’SSID e la password Wi-Fi del tuo router locale, quindi Arduino parla con il router e ottiene il proprio indirizzo IP LAN dal server DHCP. Puoi utilizzare un’APP mobile per accedere all’indirizzo IP dell’auto robot e controllarne il movimento.
(1) Decomprimi il file m2-lesson5 e vedrai una cartella chiamata m2-lesson5B, quindi carica il codice m2-lesson5B.ino in Arduino
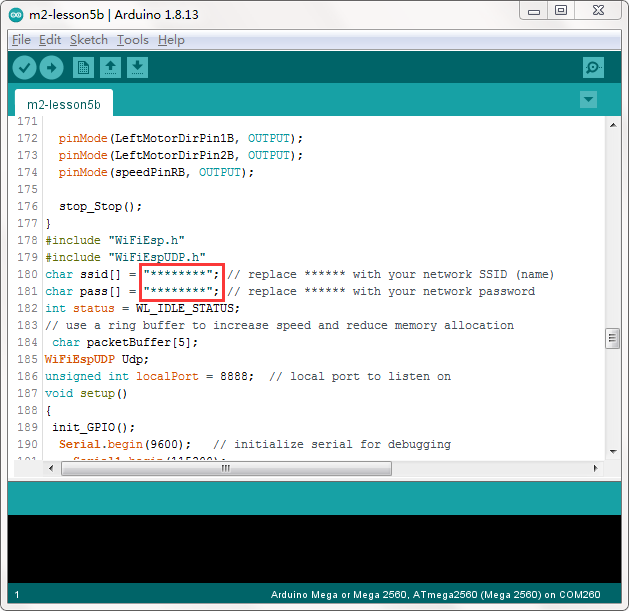
(2) È necessario modificare il codice Riga 176 e Riga 177:
char ssid[] = “YOUR_ROUTER_SSID”; // sostituiscilo con l’SSID wifi del tuo router
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // sostituisci con la tua password wifi
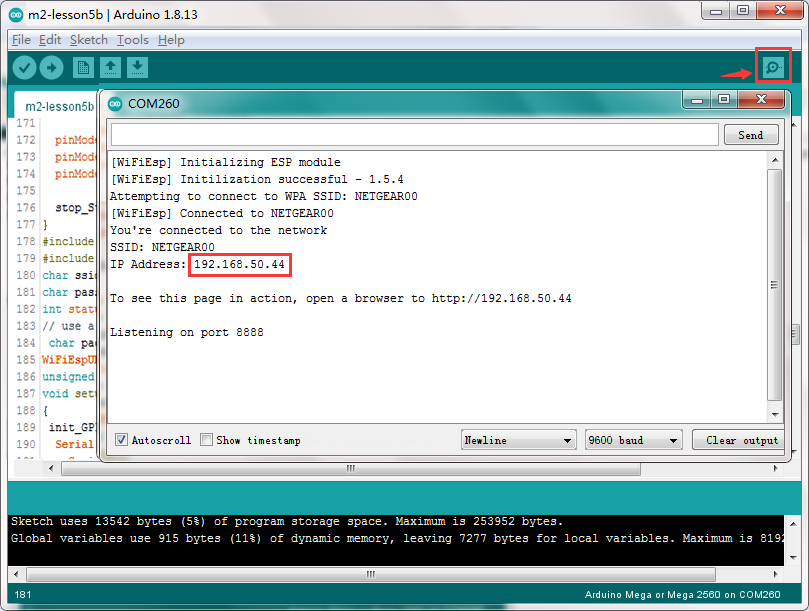
(3)Carica lo schizzo su Arduino. Infine, fai clic sulla finestra del monitor seriale nell’angolo in alto a destra dell’IDE di Arduino, vedrai il seguente risultato:
(4)In questa modalità, vedrai un indirizzo IP, che è il nostro indirizzo IP LAN assegnato dal mio router. Annotare questo indirizzo IP e fare clic su Impostazioni per impostare l’indirizzo IP del robot e impostare questo indirizzo IP nella sezione Impostazioni APP. (non è necessario modificare la porta predefinita 8888 in APP)
(5)Ora la tua auto robot è connessa alla tua LAN, puoi utilizzare il telefono cellulare sotto la stessa LAN per controllare l’auto robot. Se la tua APP è in WAN, devi andare al pannello di controllo del router, inoltrare la porta 80 all’indirizzo IP della LAN dell’auto robot, quindi puoi utilizzare l’IP del router per controllare l’auto. Questa caratteristica rende la nostra auto robotica UN VERO dispositivo INTERNET OF THING.
(6)È possibile fare clic sui tasti di direzione ◄ ► ▲ ▼ per far muovere l’auto. Usa “||” tasto pausa per fermare il movimento della macchina.
Fai clic su Ostacolo per spostarti sul lato sinistro, fai clic su Tracciamento per spostarti sul lato destro.
Fare clic su F1 per eseguire il movimento diagonale in alto a sinistra, fare clic su F3 per eseguire il movimento diagonale in alto a destra.
Fare clic su F4 per eseguire il movimento diagonale indietro-sinistra, fare clic su F6 per eseguire il movimento diagonale indietro-destra.
Domande frequenti sull’APP WIFI UDP e codice sketch:
Q1)Come regolare la velocità della macchina del robot? A: Se si desidera modificare le prestazioni di velocità dell’auto robotica, seguire i parametri nelle righe da 11 a 13:
Il valore SPEED determina la velocità di avanzamento
Il valore TURN_SPEED determina la velocità di rotazione
Il valore SHIFT_SPEED determina la velocità di cambiata parallela
Q 2)Cosa è successo quando si premono i pulsanti nell’APP OSOYOO WiFi UDP Robot Car ? A: Quando si preme un pulsante dell’APP, l’APP invierà un messaggio di una sola lettera tramite il protocollo UDP al dispositivo di destinazione (in questo esempio, il nostro Arduino WIFI Shield)
Pulsante
messaggio UDP
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
piazza
E
F7
O
F8
T
Q3)In che modo Arduino gestisce il comando UDP?
Dalla riga 233 alla riga 250 nel file m2-lesson5A.ino ci sono i codici che reagiscono al comando del cellulare. Ad esempio, quando si preme ▲, secondo la tabella Q1, un comando di lettera “A” è stato inviato dal telefono cellulare ad Arduino. Riga 233 caso ‘A’ …. dichiarazione farà in modo che l’auto faccia avanzare l’auto.
char c=packetBuffer[0];
switch (c) //serial control instructions
{
case 'A':go_advance(SPEED);;break;
case 'L':left_turn(TURN_SPEED);break;
case 'R':right_turn(TURN_SPEED);break;
case 'B':go_back(SPEED);break;
case 'E':stop_Stop();break;
case 'F':left_shift(0,150,0,150);break; //left ahead
case 'H':right_shift(180,0,150,0);break; //right ahead
case 'I':left_shift(150,0,150,0); break;//left back
case 'K':right_shift(0,130,0,130); break;//right back
case 'O':left_shift(200,150,150,200); break;//left shift
case 'T':right_shift(200,200,200,200); break;//left shift
default:break;
}
I am a big fan of this robot. I already have three Models M1. I just received my first Model M2. I appreciate the improvement with the “Model Y motor driver” and the “copper wheel coupling”!
But I have a problem with the wifi connection of this new robot. It is losing more than 70% of the UDP packets, both in emission and reception. Is there anything I can do to improve the reliability of the wifi connection?
The wifi shield is the same as in my previous robots (firmware v1.5.4). The other robots are working ok with maybe only 5% of packet drops. So it is not a problem of network overload. I tried to put the robot very close to my wifi router (about 1 meter) but the packet drops have only reduced marginally.
Controlling the robot through wifi is crucial to my project. Any help would be much appreciated
I finally solved the problem by replacing the Arduino board. It’s strange because the original Arduino board seems to work normally for everything except this wifi communication issue.

















I am a big fan of this robot. I already have three Models M1. I just received my first Model M2. I appreciate the improvement with the “Model Y motor driver” and the “copper wheel coupling”!
But I have a problem with the wifi connection of this new robot. It is losing more than 70% of the UDP packets, both in emission and reception. Is there anything I can do to improve the reliability of the wifi connection?
The wifi shield is the same as in my previous robots (firmware v1.5.4). The other robots are working ok with maybe only 5% of packet drops. So it is not a problem of network overload. I tried to put the robot very close to my wifi router (about 1 meter) but the packet drops have only reduced marginally.
Controlling the robot through wifi is crucial to my project. Any help would be much appreciated
I finally solved the problem by replacing the Arduino board. It’s strange because the original Arduino board seems to work normally for everything except this wifi communication issue.