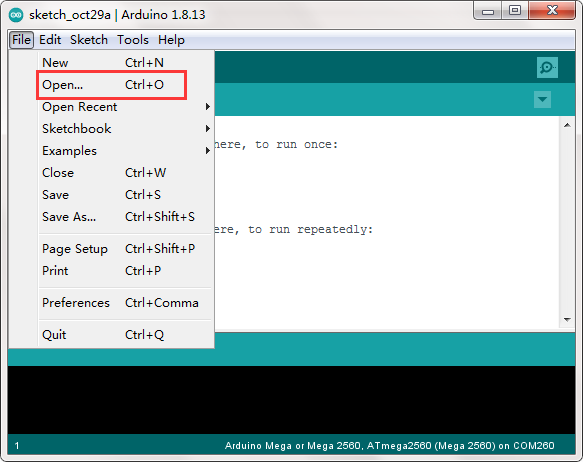
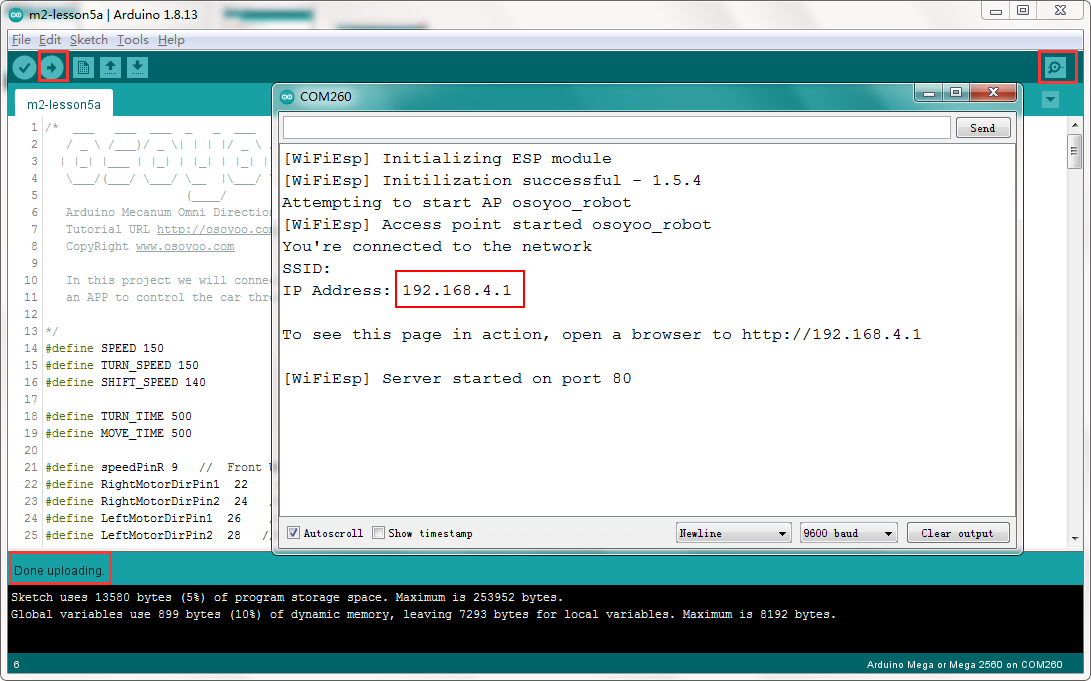
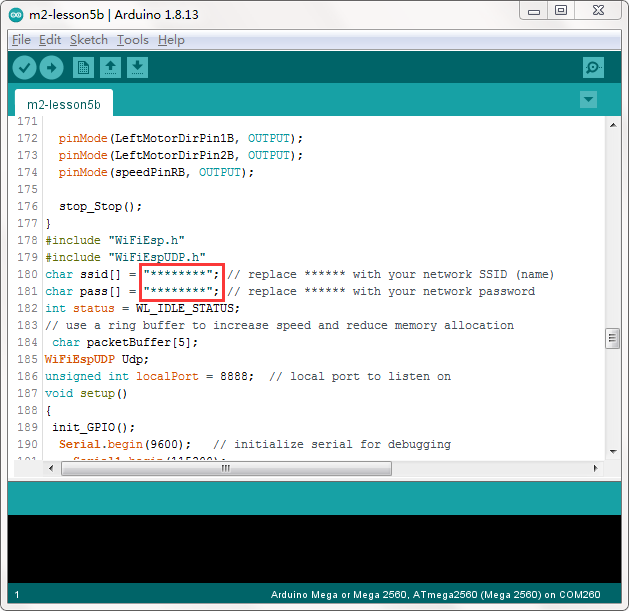
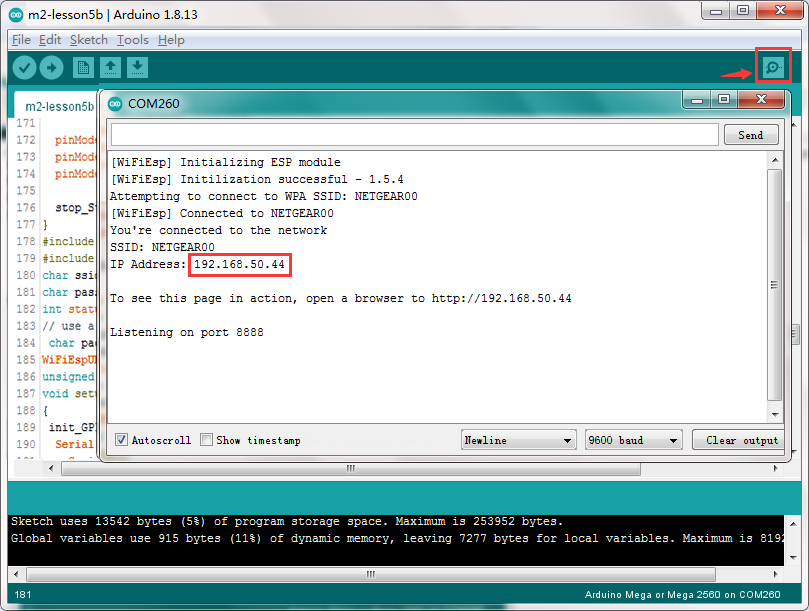
(3) スケッチを Arduino にアップロードします。 最後に、Arduino IDE の右上隅にあるシリアル モニタ ウィンドウをクリックすると、次の結果が表示されます。
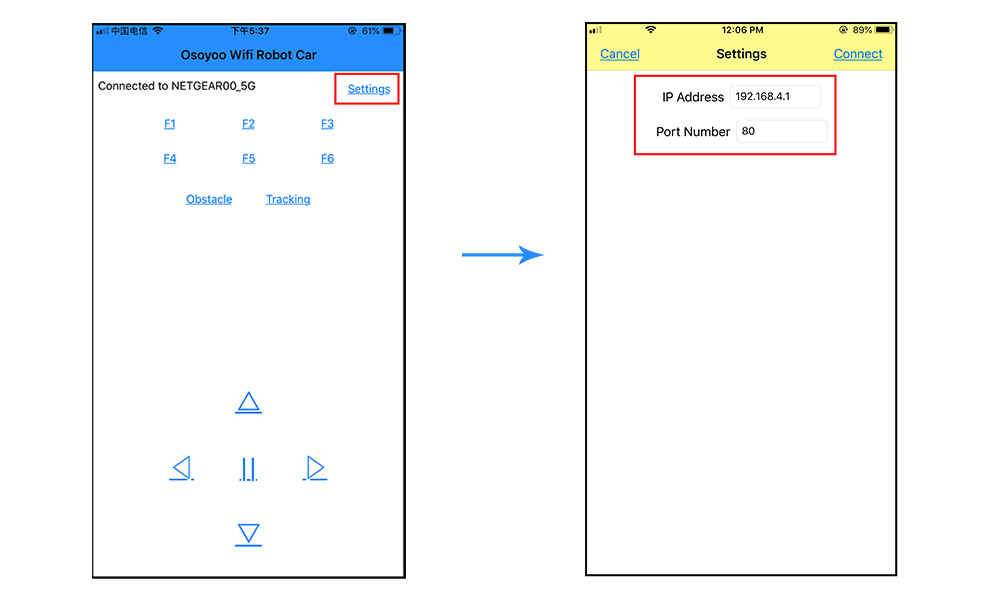
(4)このモードでは、ルーターによって割り当てられた LAN IP アドレスである IP アドレスが表示されます。 この IP アドレスを書き留めて、[設定] をクリックしてロボットの IP アドレスを設定し、この IP アドレスを [APP 設定] セクションに設定してください (APP のデフォルト ポート 8888 を変更する必要はありません)。
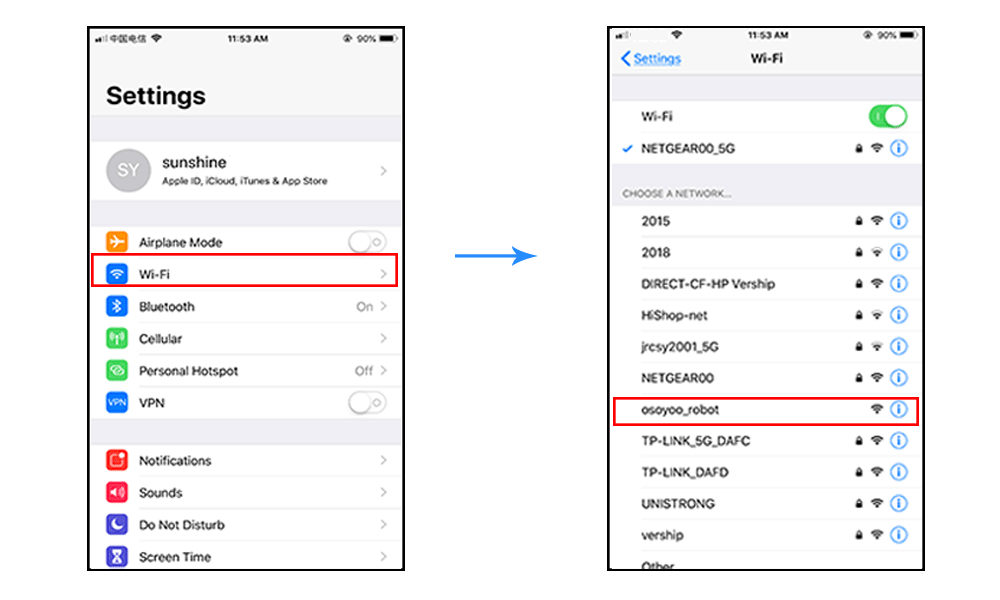
(5)これで、ロボットカーが LAN に接続され、同じ LAN で携帯電話を使用してロボットカーを制御できます。 APP が WAN にある場合は、ルーター コントロール パネルに移動し、ポート 80 をロボット車の LAN IP アドレスに転送する必要があります。その後、ルーター IP を使用して車を制御できます。 この機能により、私たちのロボットカーは真のモノのインターネットデバイスになります。
char c=packetBuffer[0];
switch (c) //serial control instructions
{
case 'A':go_advance(SPEED);;break;
case 'L':left_turn(TURN_SPEED);break;
case 'R':right_turn(TURN_SPEED);break;
case 'B':go_back(SPEED);break;
case 'E':stop_Stop();break;
case 'F':left_shift(0,150,0,150);break; //left ahead
case 'H':right_shift(180,0,150,0);break; //right ahead
case 'I':left_shift(150,0,150,0); break;//left back
case 'K':right_shift(0,130,0,130); break;//right back
case 'O':left_shift(200,150,150,200); break;//left shift
case 'T':right_shift(200,200,200,200); break;//left shift
default:break;
}
I am a big fan of this robot. I already have three Models M1. I just received my first Model M2. I appreciate the improvement with the “Model Y motor driver” and the “copper wheel coupling”!
But I have a problem with the wifi connection of this new robot. It is losing more than 70% of the UDP packets, both in emission and reception. Is there anything I can do to improve the reliability of the wifi connection?
The wifi shield is the same as in my previous robots (firmware v1.5.4). The other robots are working ok with maybe only 5% of packet drops. So it is not a problem of network overload. I tried to put the robot very close to my wifi router (about 1 meter) but the packet drops have only reduced marginally.
Controlling the robot through wifi is crucial to my project. Any help would be much appreciated
I finally solved the problem by replacing the Arduino board. It’s strange because the original Arduino board seems to work normally for everything except this wifi communication issue.


















I am a big fan of this robot. I already have three Models M1. I just received my first Model M2. I appreciate the improvement with the “Model Y motor driver” and the “copper wheel coupling”!
But I have a problem with the wifi connection of this new robot. It is losing more than 70% of the UDP packets, both in emission and reception. Is there anything I can do to improve the reliability of the wifi connection?
The wifi shield is the same as in my previous robots (firmware v1.5.4). The other robots are working ok with maybe only 5% of packet drops. So it is not a problem of network overload. I tried to put the robot very close to my wifi router (about 1 meter) but the packet drops have only reduced marginally.
Controlling the robot through wifi is crucial to my project. Any help would be much appreciated
I finally solved the problem by replacing the Arduino board. It’s strange because the original Arduino board seems to work normally for everything except this wifi communication issue.