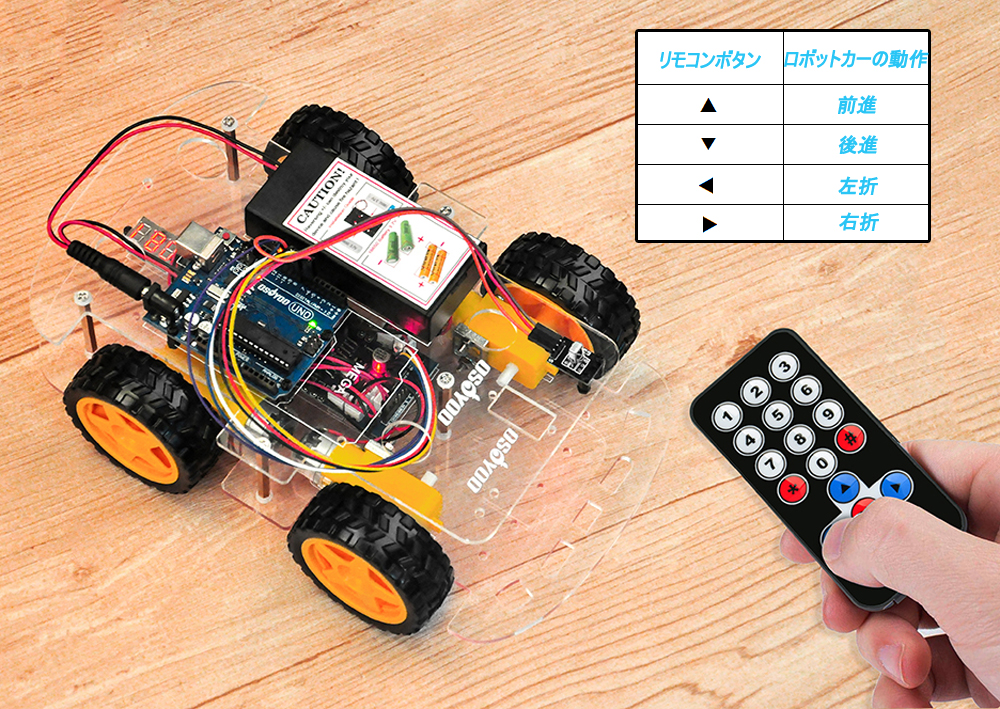
#define IR_ADVANCE 0x00FF18E7 //code from IR controller “▲” button
#define IR_BACK 0x00FF4AB5 //code from IR controller “▼” button
#define IR_RIGHT 0x00FF5AA5 //code from IR controller “>” button
#define IR_LEFT 0x00FF10EF //code from IR controller “<” button
#define IR_STOP 0x00FF38C7 //code from IR controller “OK” button
#define IR_turnsmallleft 0x00FFB04F //code from IR controller “#” button
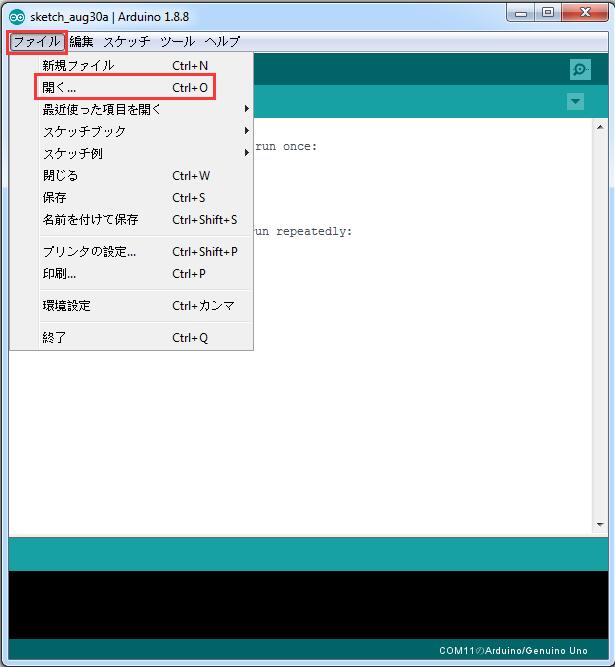
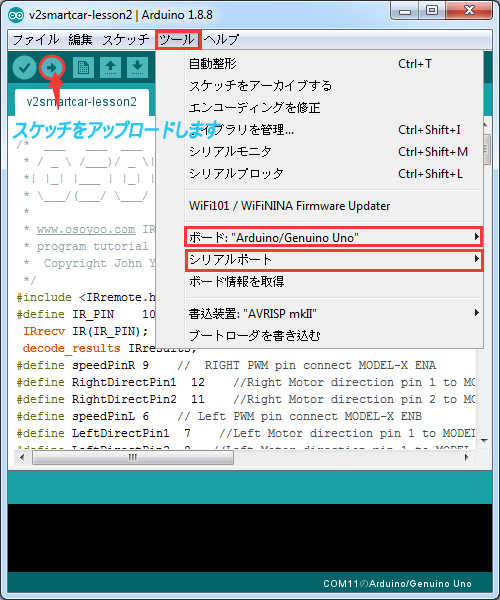
上記の行の各ボタンの値を、 Step A). から獲得したのコードを変更してください。変更方法がわからない場合は、メールを送信して、 Step A))の各ボタンのコードをお知らせください。コードを変更し、新しいスケッチファイルをメールでお送りします。
上記の方法では、他のIR送信デバイス(テレビのリモコン、DVDのリモコン、エアコンのリモコンなど)を使用して車を制御することもできます。 Step A) を使用してリモコンのキーコードを取得し、 Step B) でスケッチファイルを変更するだけで機能します。
Above method can also allow you to use other IR sending device (i.e TV remote, DVD remote, air conditioner remote etc) to control the car. Just use Step A) to get the key code of your remote and change the sketch file in Step B), it will work.
Our robot car only goes forward. When we tested the IR sensor the code returned for every button is the same FFFFFFFF. Tried even putting all the codes listed on the screen shot above from the tutorial and they all make each button make the car go forward only











.jpg)



Hi,
I have done all the steps but my right two motors do not move. what am I doing wrong?
Please check the wirings firstly.
Do you test lesson 1 or lesson 2 With this problem you met,
if you test lesson 2, do you press any key?
Please take photos send to my email address: [email protected]
Our robot car only goes forward. When we tested the IR sensor the code returned for every button is the same FFFFFFFF. Tried even putting all the codes listed on the screen shot above from the tutorial and they all make each button make the car go forward only