VIDEO 認定オンライン小売業者
アメリカのアマゾンから購入する イギリスのアマゾンから購入する ドイツのアマゾンから購入する イタリアのアマゾンから購入する フランスのアマゾンから購入する スペインのアマゾンから購入する 日本のアマゾンから購入する
目的
このレッスンでは2台のキットを使用します(1台しか無い場合は、障害物を使いレッスン内容を実行していただけます)。各ロボットカーに障害物センサーを取付け、ロボットカーの動きに追従する動作を体験していただけます。
またこのレッスンを進める前に、レッスン1 の内容を完了させておいてください.
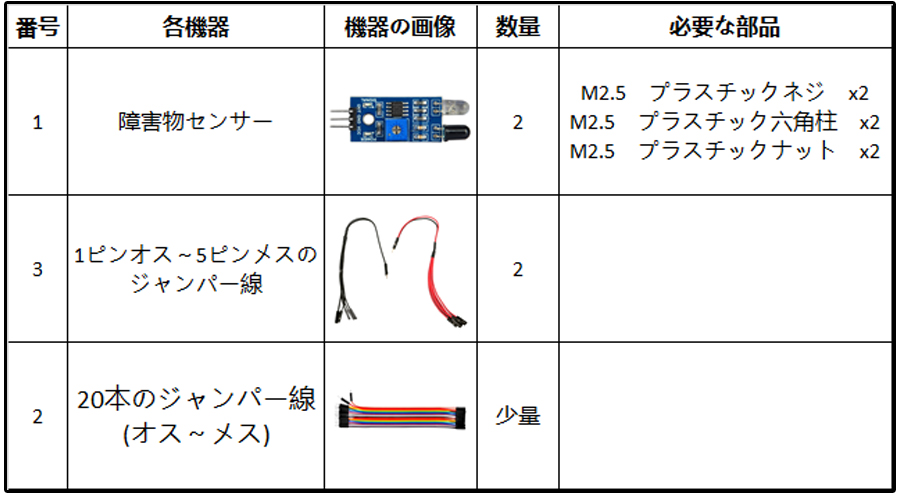
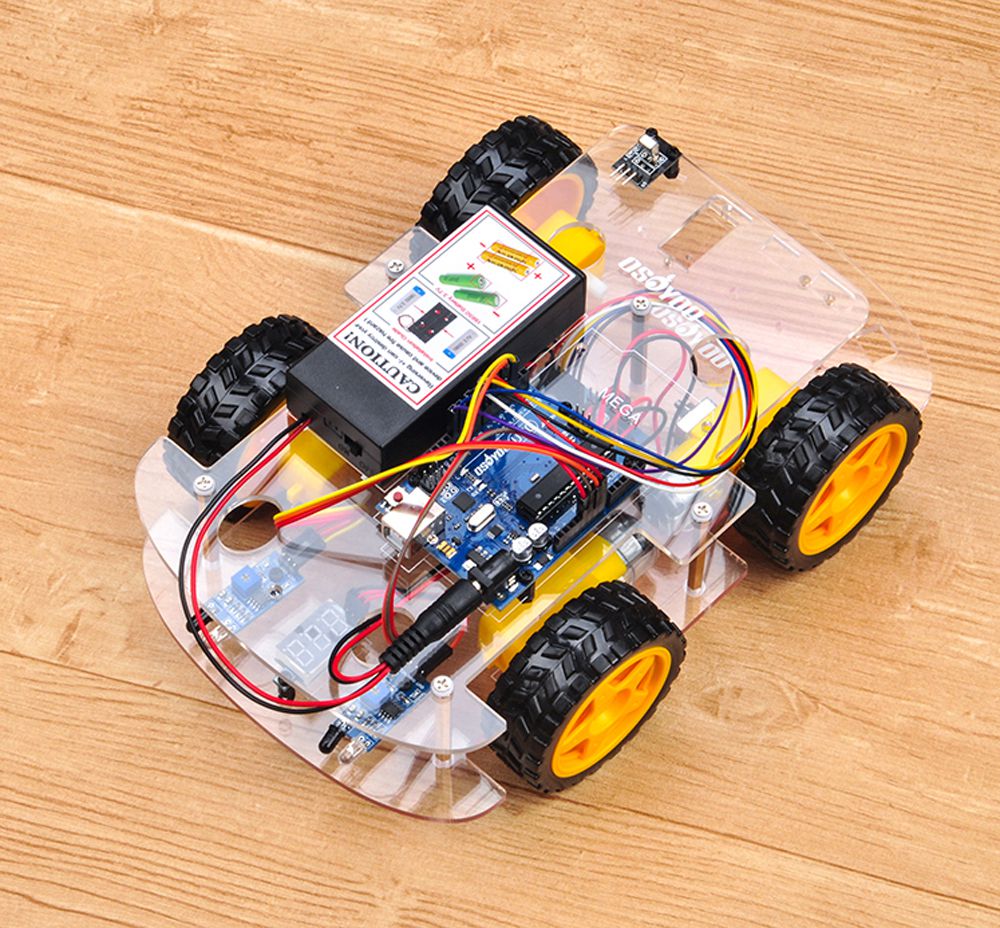
部品など各機器
各機器の設置と接続 ステップ1: レッスン3の内容は、全てレッスン1 .における車体の完成が必要になりますので、まずレッスン1 を完成させましょう。.
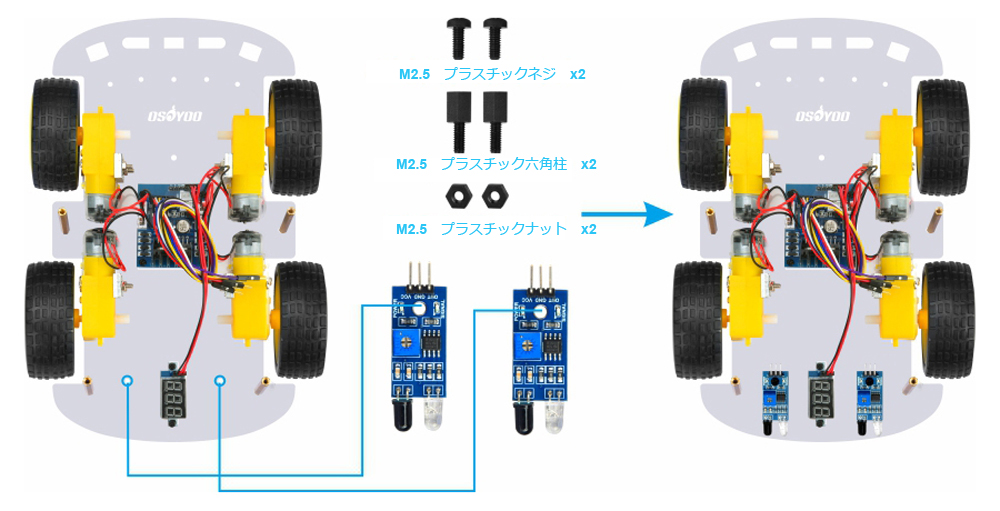
ステップ2: 上部シャーシ側に固定している5本の銅柱のネジを外して、2個の障害物センサーを各2本ずつM2.5プラスチックネジ・ナットと、六角柱を使用して取り付けます。
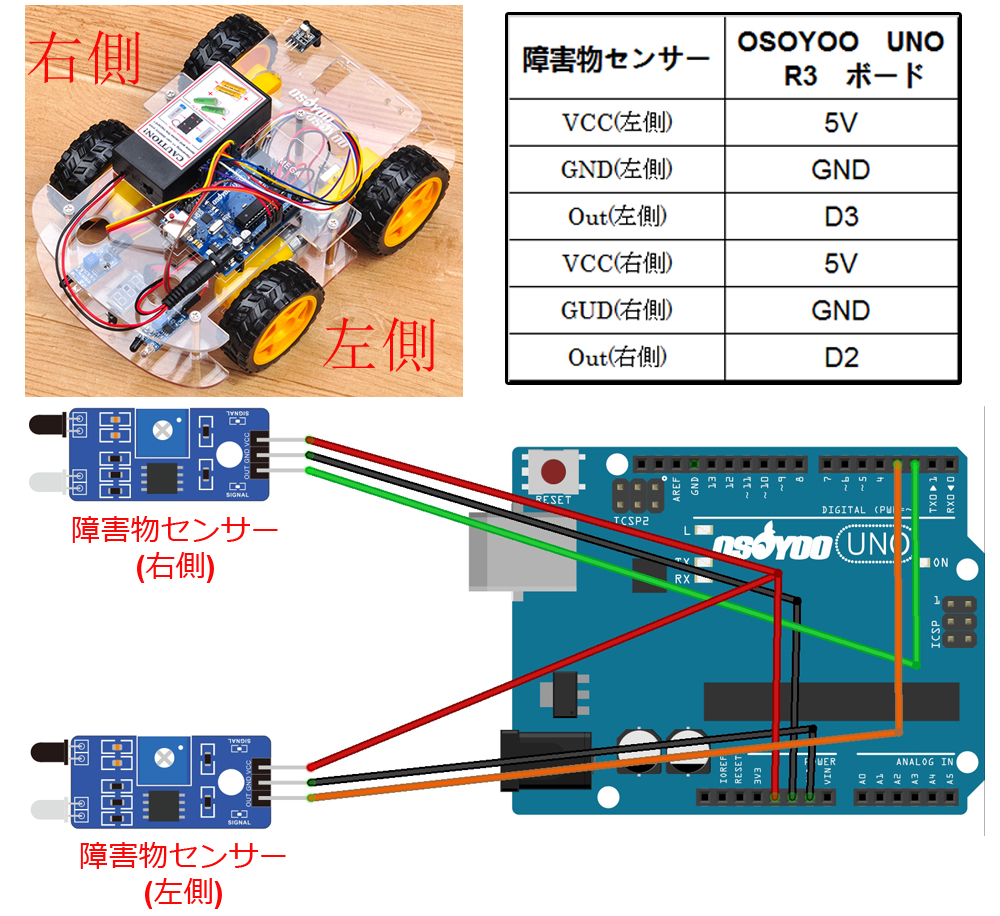
ステップ3: 下記図のように、ジャンパー線をUNOボードと障害物センサー接続します。接続時には右側と左側を間違えないように注意してください (レッスン1で接続した配線は取り外さないでください)
ステップ4: ステップ2で取り外した銅柱のネジを再度固定します。
プログラムをインストール
ステップ1: 最新版のアルドゥイーノIDEをインストールします(1.1.16以降のアルドゥイーノIDEバージョンをお持ちの場合は、このステップを飛ばしてください)。
ダウンロードはhttps://www.arduino.cc/en/Main/Software?setlang=ja
ステップ2: ソースをダウンロードします。 https://osoyoo.com/driver/v2smartcar-lesson3.zip からソースをダウンロードするとzipファイルなので、解凍するとv2smartcar-lesson3というフォルダーが表示されます。
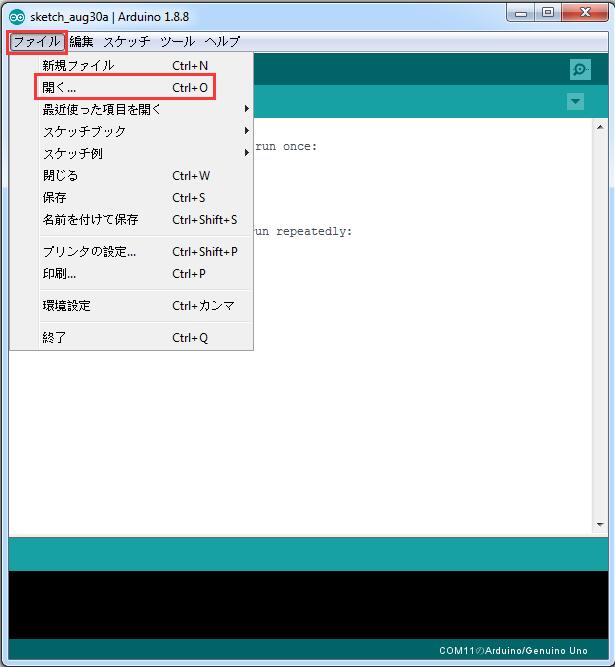
ステップ3: UNOボードとPCをUSBケーブルで接続し、アルドゥイーノIDEを開きます。開いたらファイルをクリック – >開くをクリック – > smartcar-lesson3フォルダー内のコード「v2smartcar-lesson3.ino」を選択し、コードをアルドゥイーノにロードします。
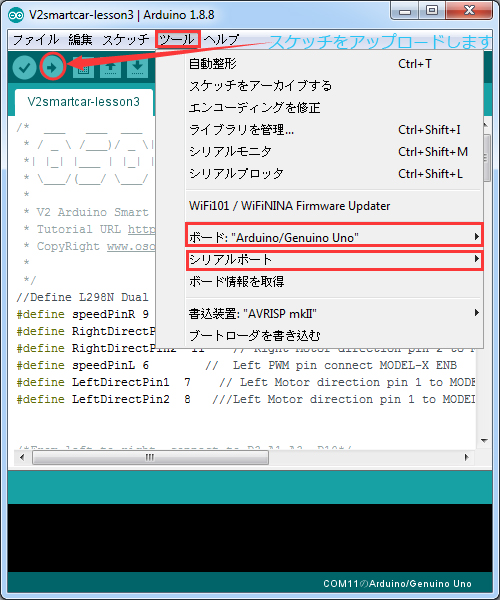
ステップ4: プロジェクトに対応するボードとポートを選択し、スケッチ(ソース)をアップロードします。
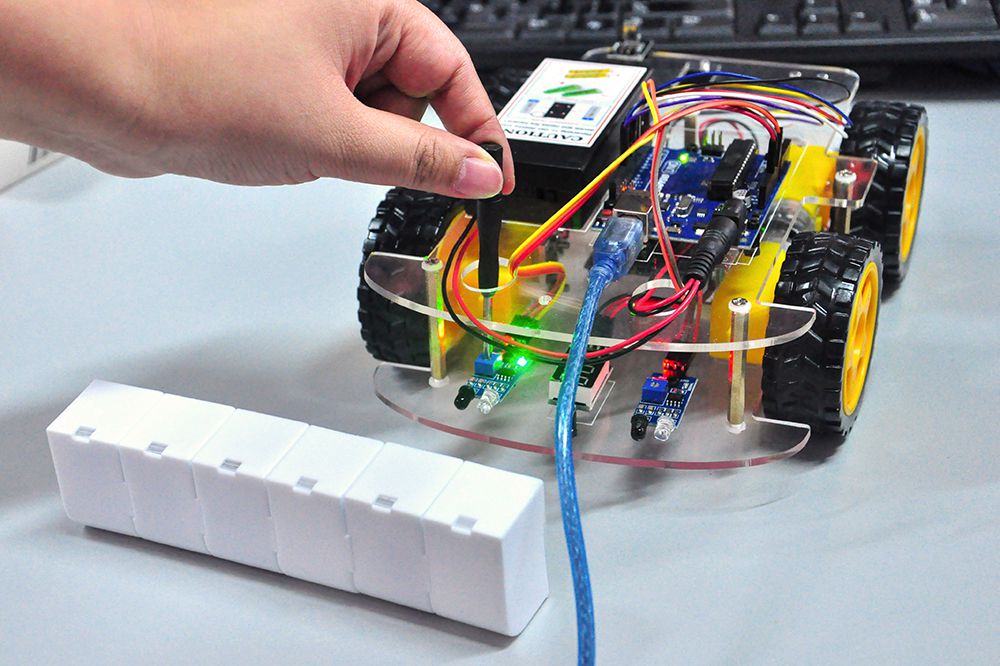
ステップ5: アップロードが完了したら電源を入れ、各障害物センサーの約10cm先に障害物を設置し、下記図のようにプラスドライバーを使用して障害物センサーを調整してください。調整したら障害物を検出します。
注:障害物センサーが障害物を検出すると、センサーの電源と信号インジケーターが点灯します。同センサーと物の距離が一定値以上離した場合は電源インジケーターが点灯します。ただし信号インジケーターが点灯している場合は調整してください。
動作テスト
電源を入れ、物や手をロボットカーの前にかざすと、障害物センサーが反応して動きます。
注:













The IR sensor light is always ON and the tires are always turning. What could be the problem?
Do you mean the two lights are always on or just the power indicator is on?
If two are on, Please adjust potentiometer firstly. and if this doesn’t work, please check the wirings.
If there is one power indicator on, there is no matter.