No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
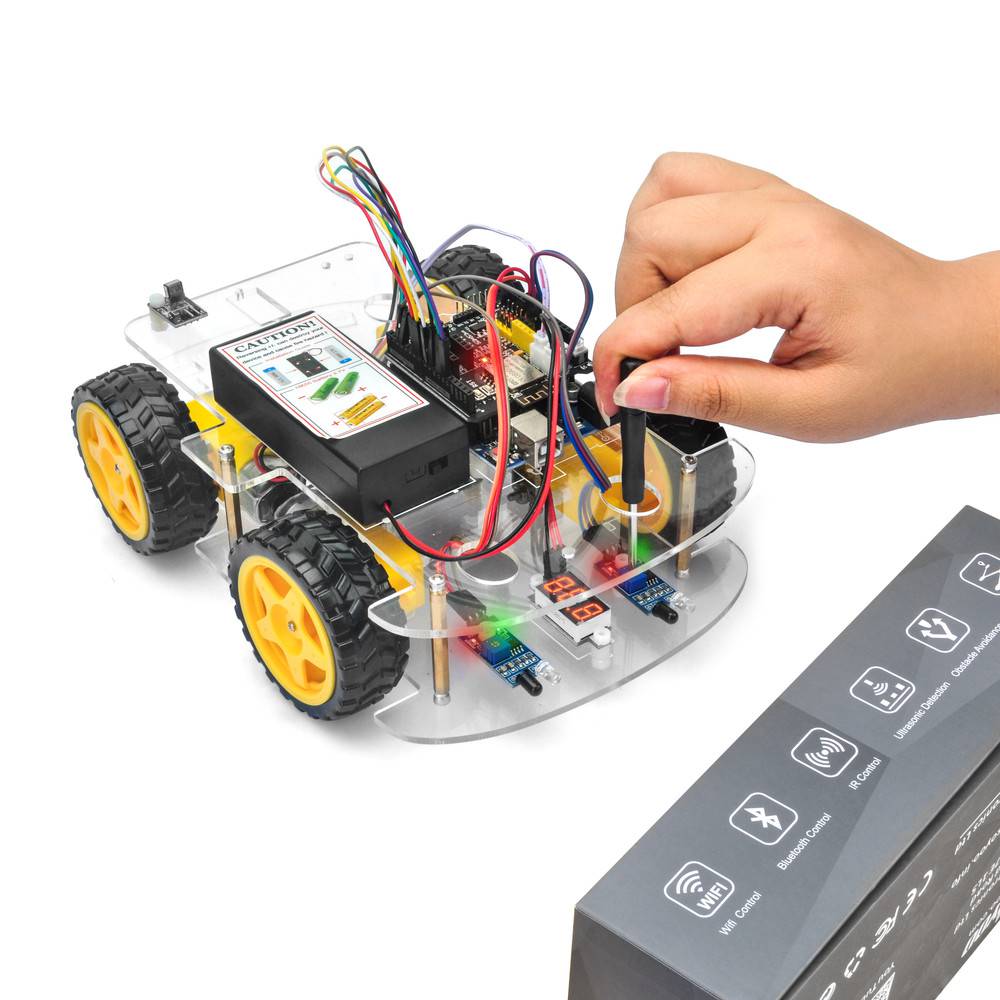
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help




















Hello, the object sensors are very weak. I have to put a paper about 2 cm to the car to detect it. Any suggestions ?
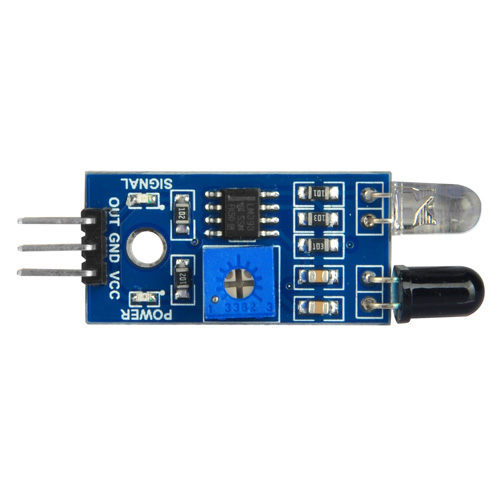
you can adjust the sensitivity potentiometer with a screwdriver. see this https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson3/3.jpg
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
Can someone please help me order replacements?
Oh, good grief. Never mind. I completely failed to notice the “click here to buy” link next to the parts list above.
OK, If you get any issue, please contact me again. Thanks.
Hi,
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
Kelvin.
Does the saftware notice successfully?
Pleas confirm you download the lesson 2 IR remote car or this commented lesson(lesson3).
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
Thank you. Your interest and support make us progress
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
Please provide your order No. and address, I’ll send the IR to you ASAP.
I have had this same problem have you managed to sort it out or is a new part needed?
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help
Is one of the sensers suppose to have gunk on it?
Why do you ask such question? Our sensors should be brand new and clean in the package.