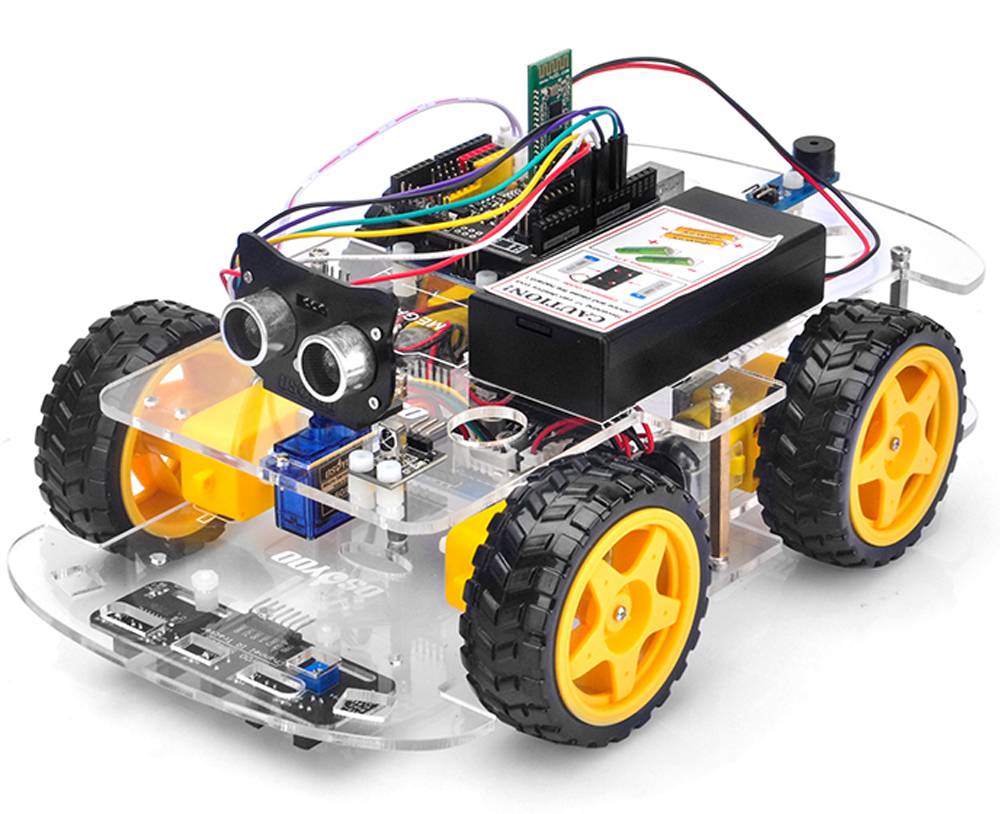
このレッスンでは、モバイルを使用してロボットカーを制御し、模倣運転を行います。
アプリで仮想のステアリングホイールと実際の車を模倣した装置を使います。
このレッスンを続行する前に、 レッスン1(車の組み立て) を完了しておかなければなりません。
部品とデバイス
| 番号 |
画像 |
デバイス |
個数 |
付属品 |
リンク |
| 1 |
 |
HCモジュール |
1 |
|
購入はここを |
ハードウエアーの取付方法
ステップ1: スマートカーレッスン1 . の様に基本のフレームワークをインストールします、もしレッスン1の組立を完了している場合はUNO R3ボードの配線したワイヤーを取り外してください
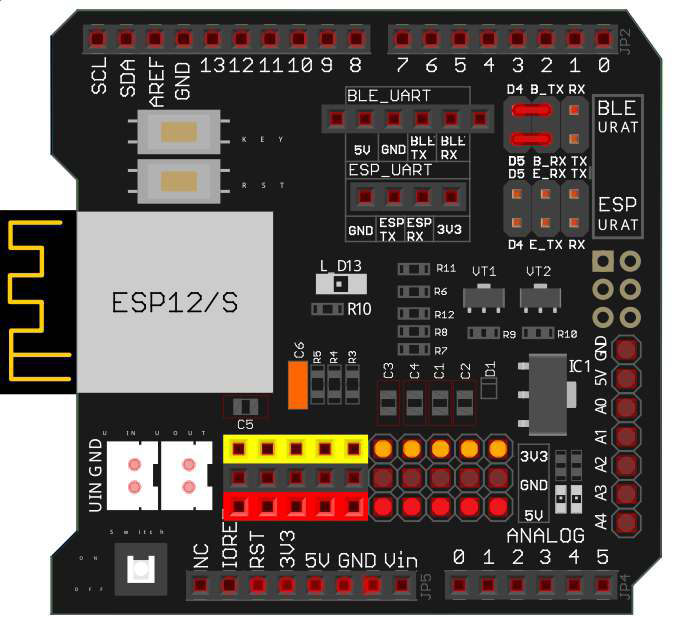
ステップ2: BluetoothのTX/RX端子をUNOボードD4/D5をジャンパーキャプで接続
注:当社のOSOYOO Uart WiFiシールドV1.3は、初期出荷時にジャンパーキャップをUNO D4、D5とBLE URAT TX / RXポートに接続しています。もしBluetooth TX / RXポートがD4、D5に接続されていない場合は、ジャンパーキャップまたはジャンパーワイヤーを使用してB-TXをD4に、B-RXをD5にそれぞれ接続する必要があります。
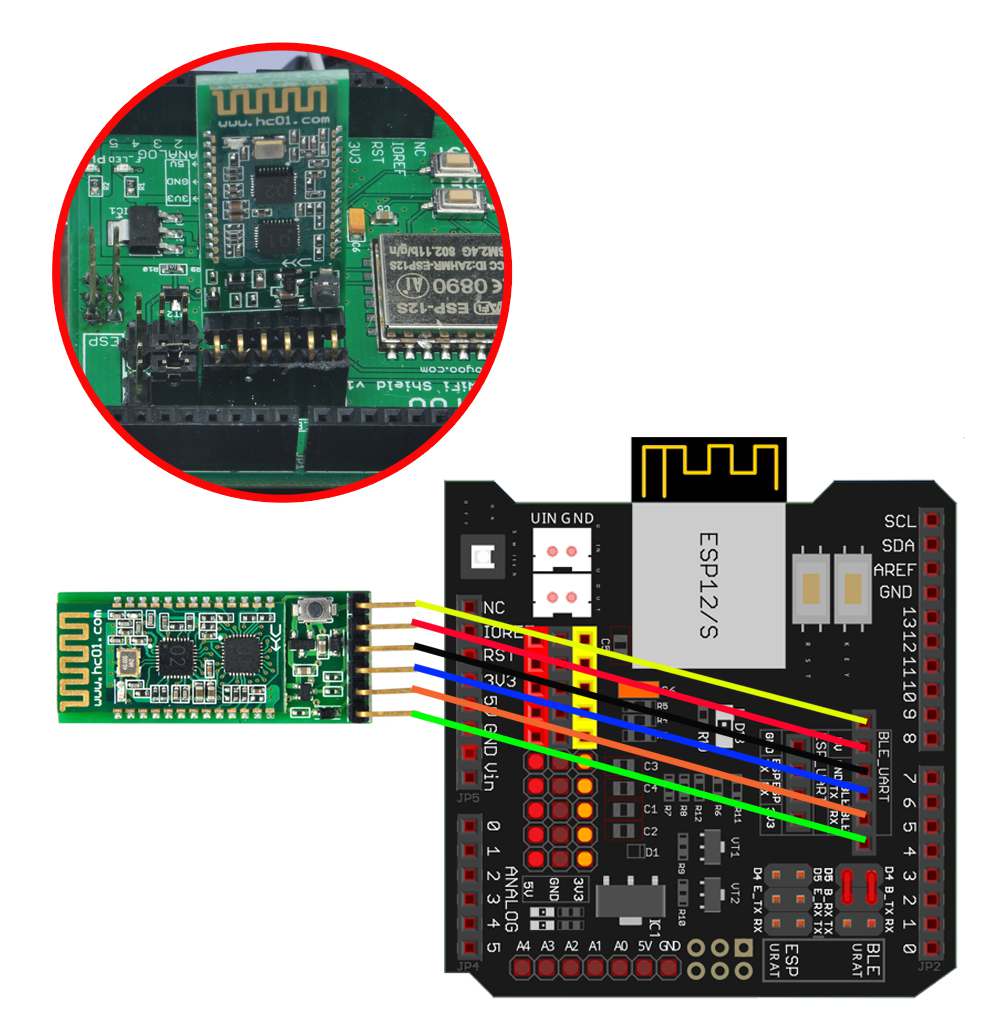
ステップ3: つぎの様にOSOYOO Uart WiFi shield V1.3 Bluetooth スロットルにBluetoothモジュールを装着してください。
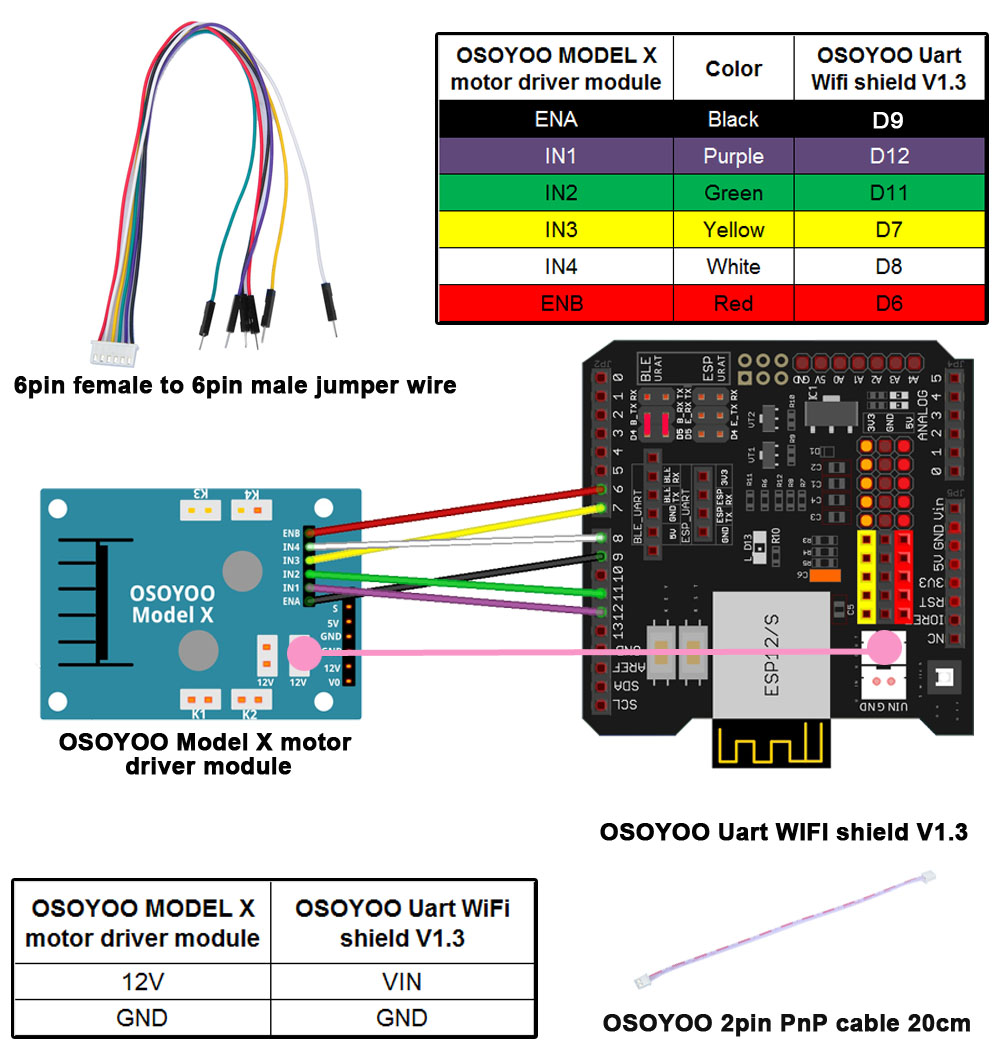
ステップ4: OSOYOO モデルXモータードライブモジュールとUart WiFi shield V1.3を次の様に接続する:
モーター制御システムをレッスン1に戻すことを忘れないでください:
- 最後のプロジェクトがレッスン1、2、3、4の場合、モーター制御システムはレッスン1と同じでなので、何もする必要はありません。
- 最後のプロジェクトがレッスン5、6の場合、ENAワイヤーをD3からD9に変更し、D6、D7、D8、D11、D12の配線を同じ位置に保ち、OSOYOO UartWiFiシールドV1.3 の他のすべてのワイヤーを取り外す必要があります。
レッスン1のスケッチコードを実行し、モーターの接続が正しいことを確認することをお勧めします。これは次のステップにとって重要な事です。
ソフトウェアのインストール;
ステップ1: 携帯電話にAPPをインストールします。
1)次のようにAndroidデバイスにAPPをインストールします
Google Playストアでアプリ名「OSOYOOイミテーションドライビング」を検索し、次のようにアプリをダウンロードしてスマートフォンにインストールします
Google Playを使用してアプリを見つけることができない場合は、次のリンクからアプリをダウンロードしてください:https://osoyoo.com/test/mockdrive.apk.
2)次のようにAppleIOSデバイスにAPPをインストールします
Apple APPストアでアプリ名「OSOYOOイミテーションドライビング」を検索し、次のようにアプリをダウンロードしてスマートフォンにインストールします
ステップ2: v2smartcar-lesson7からアルドゥイーノスケッチコードをダウンロードしてインストールします。このファイルを解凍すると、v2smartcar-lesson7というフォルダーが表示されます。 アルドゥイーノIDEを開きます>[ファイル]をクリック>[開く]をクリック> v2smartcar-lesson7フォルダーでコード「v2smartcar-lesson7.ino」を選択クリックして、コードをアルドゥイーノにロードします
 APP UIの説明
APP UIの説明
-
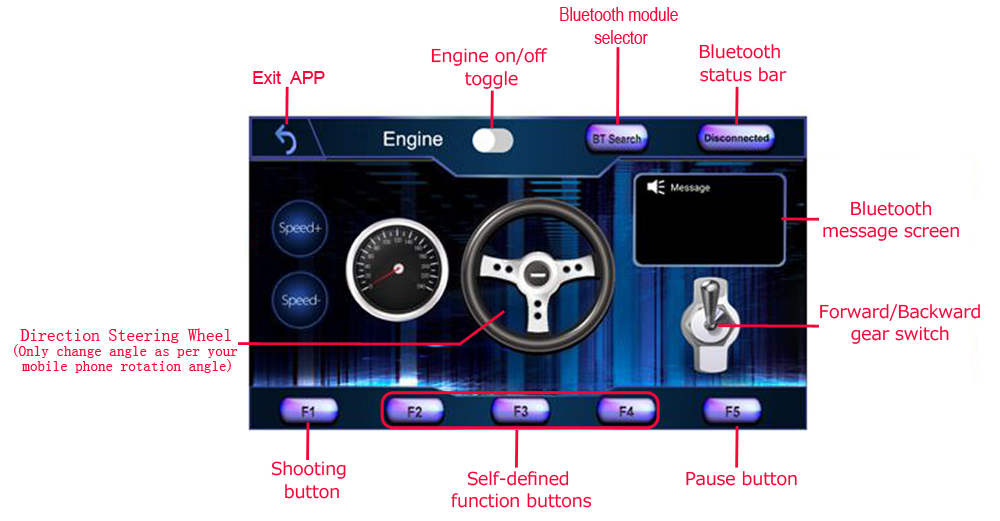
- BT検索ボタン:このボタンをクリックすると、APPとペアリングされたBluetoothデバイスリストが表示されます。HC-02デバイスを選択して車を接続します。HC-02が接続されると、Bluetoothステータスが[切断済み]から[接続済み]に変わります。Bluetoothが接続されている場合にのみ車を制御できます。
- <strongエンジントグル:エンジントグルがオフ(白)に設定されている場合、車は停止し、APPのすべてのボタンが無効になります。エンジントグルがON(赤)に設定されている場合、車は動き始めます。他のすべての移動制御ボタンがアクティブになります
- 前進/後進ギアスイッチ:このギアスイッチは、実際の車のギアのように、車が前進または後進するのを制御できます。
- F1、F2、F3、F4、F5のカスタマイズされたボタン。このレッスンでは、車の動きを一時停止するF5のみを使用します。F5とエンジンオフボタンの違いは、エンジンオフボタンに触れると、他のすべてのボタンが無効になることです。他のボタンを有効にするには、エンジンボタンをもう一度切り替える必要があります。一方、F5をクリックすると、車は停止しますが、他のすべてのボタンはアクティブなままです。どのボタンにも触れなくても、携帯電話の角度位置を変えるだけで(ハンドルを動かすように)、車は再び動きます。
- ハンドル: 実車のハンドル操作と同じく、右折したい場合は携帯端末を右に傾けると傾けた角度分だけ右折するといった具合に、携帯端末の角度を回転させることで、回転角度に従って曲がる角度が変わります。このアプリケーションでは、実車の操作と同様なので、例えば後ろ向き駐車をするならシフトレバーを後進に入れ、ハンドルを駐車したい向きに傾けることで駐車位置に停止させることができます。
- Speed +:ロボットカーの速度を上げます
- Speed-: ロボットカーが減速します
Bluetoothの接続について
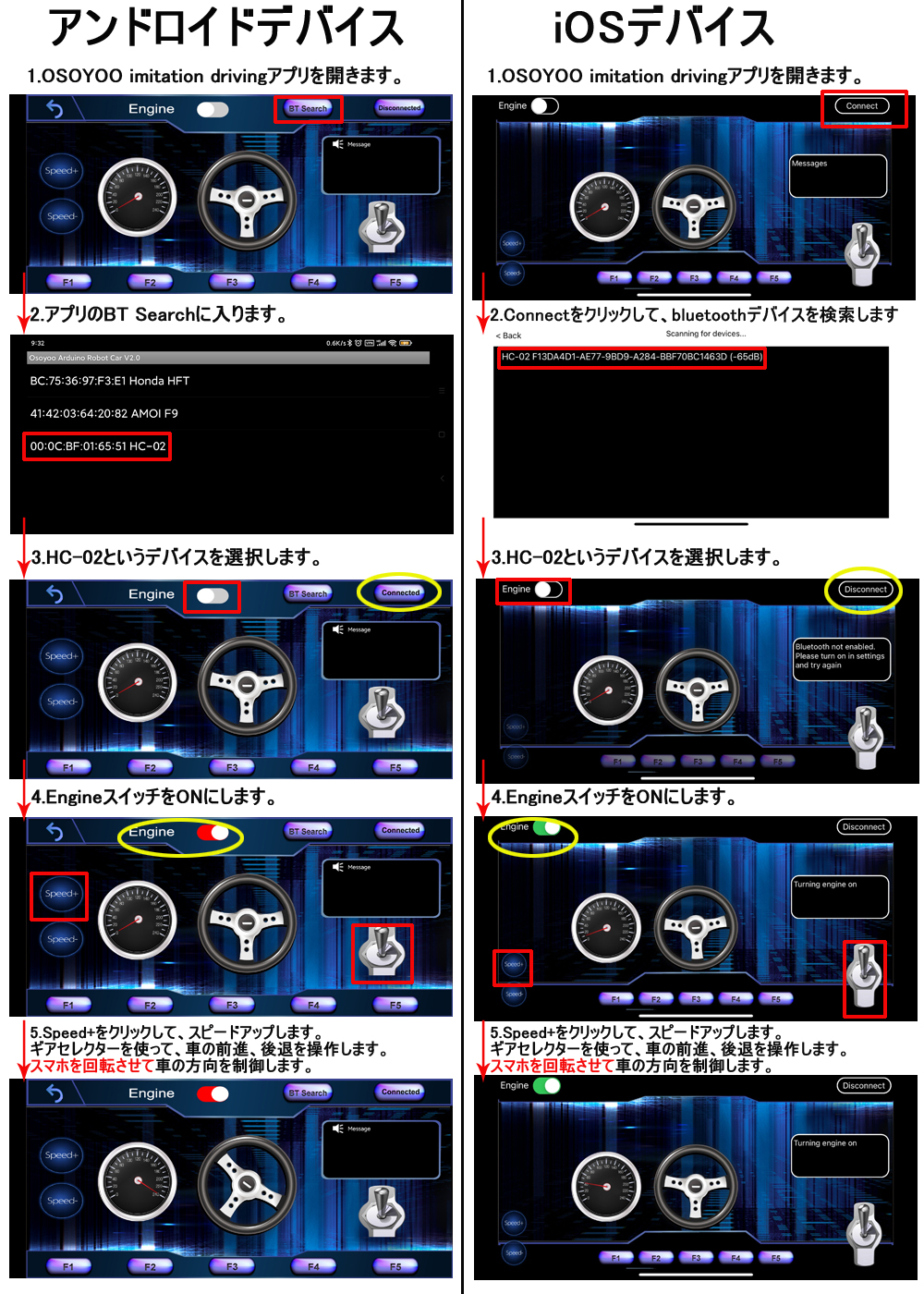
Androidデバイスに接続:
Androidデバイスを使用する場合、アプリを開く前に必ずBluetoothモジュールをペアリングしてください。
携帯電話の[設定]->[Bluetooth]で、HC02というBluetoothデバイスを見つけ、パスワード欄に1234を入力して、ペアリングします。
Bluetooth HC02デバイスがペアリングされたら、アプリを開きます。
アプリのBTSearch ボタンをクリックして、APPをHC02デバイスに接続します。
iOSデバイスに接続:
iOSデバイスを使用している場合は、
アプリを開き、[Connect]ボタンをクリックすると、Bluetoothデバイスリストが表示され、HC02デバイスを選択します。
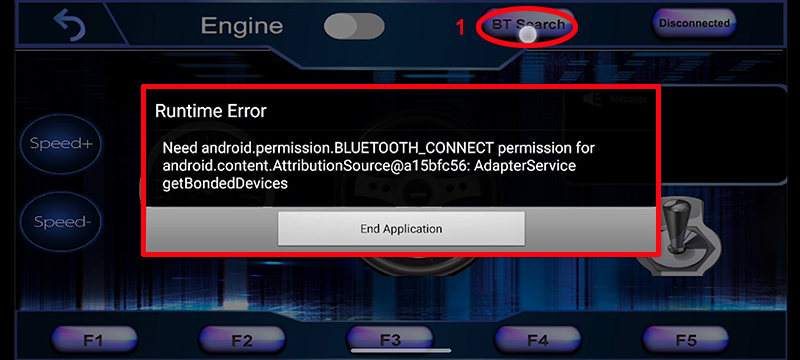
ご注意: もし、Android デバイス(最新AndroidOS)で「BT search」ボタンをクリックして以下のエラーポップが表示された場合は、次の手順に従ってください:
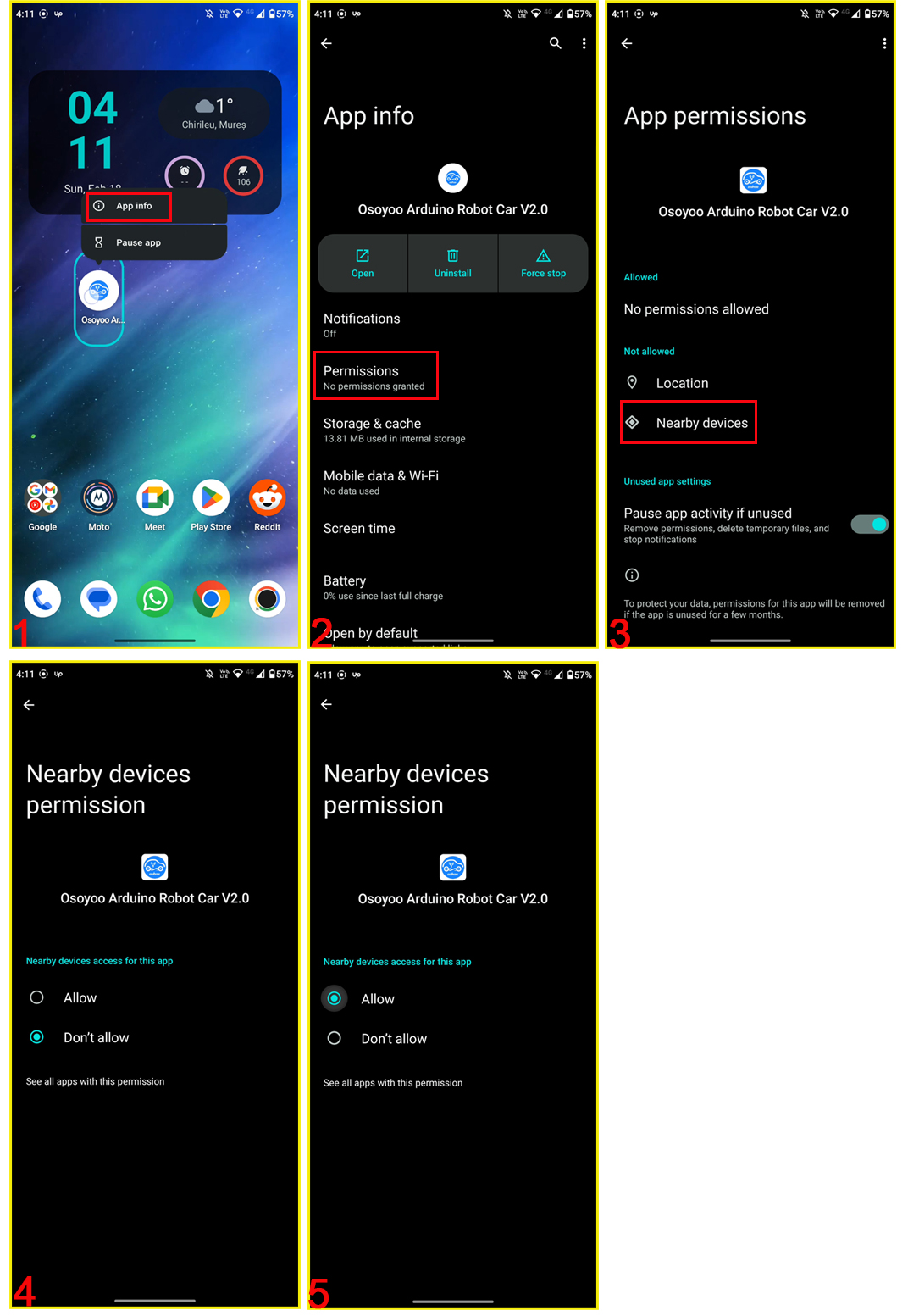
1. OSOYOO imitationアプリのアイコンを長押しして、「APP info」を選択します。
2.「Permissions」を選択します。
3.「Nearby device」を選択し、「Allow」に変更します(設定の詳細については、次のビデオをご覧ください: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson7/APP.mp4 )
ロボットカーを運転する
これで、このレッスンのハードウェアとソフトウェアがインストールされました。車を運転しましょう。
ステップ1)ロボットカーを地面に置き、スイッチをオンにします。
ステップ2))携帯電話->設定-> Bluetooth設定に移動し、HC-02というBluetoothデバイスを検索し、コード1234とペアリングします
ステップ3))ロボットAPPを駆動するOSOYOOイミテーションを開き、BT検索ボタンをクリックして、ペアリングしたBluetoothを見つけます
ステップ 4)エンジントグルをオンにし、Speed +をクリックして、ロボットカーが最初は非常に遅いのでロボットの速度を上げます。 携帯電話の角度を回転させると、車の方向が変わります。.
運転を楽しんでください!

















Hello! Me and my son have just hooked up our OSOYOO as the directions provide. We ran the lesson 1 code to check the motors are working properly. We can connect the iOS app to the HC-02, but cannot get the engine to start. We checked everything over and cannot find our error. Any ideas?
Please click speed+ several times to make the robot car move quickly.
please provide the screenshot when you operate the APP.
Hi Elaine,
I have a small problem with Lesson 7. I have completed all connections and downloaded the App to my android phone. The BT-search finds HC-02 and App connects. I can start engine, run the car forward and back with toggle control and pause the car with button F. However the steering wheel does not work. Have you any suggestions?
Regards, James Robb.
hi, James,
The way you rotate your cell phone may be wrong. You need to rotate the cell phone vertically not horizonlly. Please see our video.
If it doesn’t work yet, please tell me which version Android IOS of your phone.
Elaine
HI Elaine,
I have already tried all movements of the phone. I have a Blackview A50 mobile phone (no sim card) only used as controller. It has Android 11 o/s.