| Buy from OSOYOO |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
Buy from JP |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、Raspberry Piのロボットカーが超音波センサーを使って障害物を検知し、自動運転と衝突回避を行います。

| No. |
写真 |
部品 |
数量 |
付属品 |
Link |
| 1 |
 |
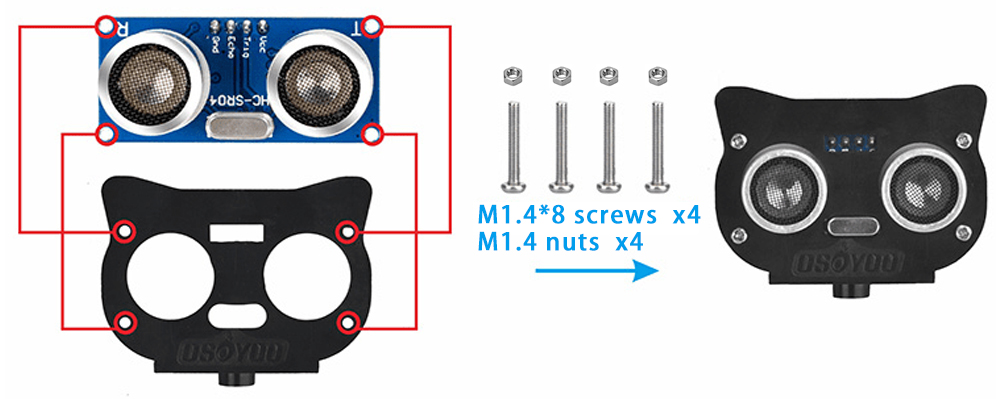
Ultrosonic Sensor |
1 |
M1.4*8 Screw x 4
M1.4 Nut x 4 |
ここをクリックして購入する |
| 2 |
 |
Servo Motor |
1 |
M2.2*8 Self Tapping Screw x 2
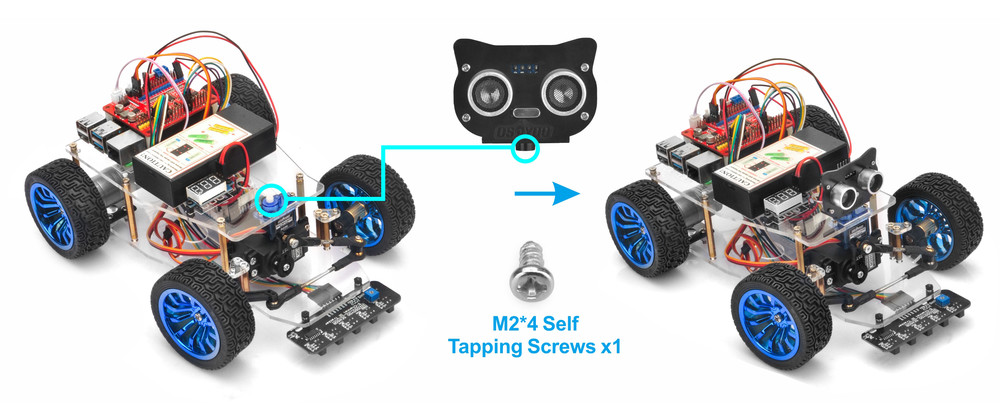
M2*4 Self Tapping Screw x 1 |
ここをクリックして購入する |
| 3 |
 |
Mount Holder for Ultrasonic Sensor |
1 |
M1.4*8 Screw x 4
M1.4 Nut x 4
M2*4 Self Tapping Screw x 1 |
ここをクリックして購入する |
| 4 |
 |
10Pin jumper wire female to female 20cm |
some |
|
|
| 5 |
 |
Philips screwdriver |
1 |
|
ここをクリックして購入する |

Step 1: Lesson1とLesson 2を完了してください。
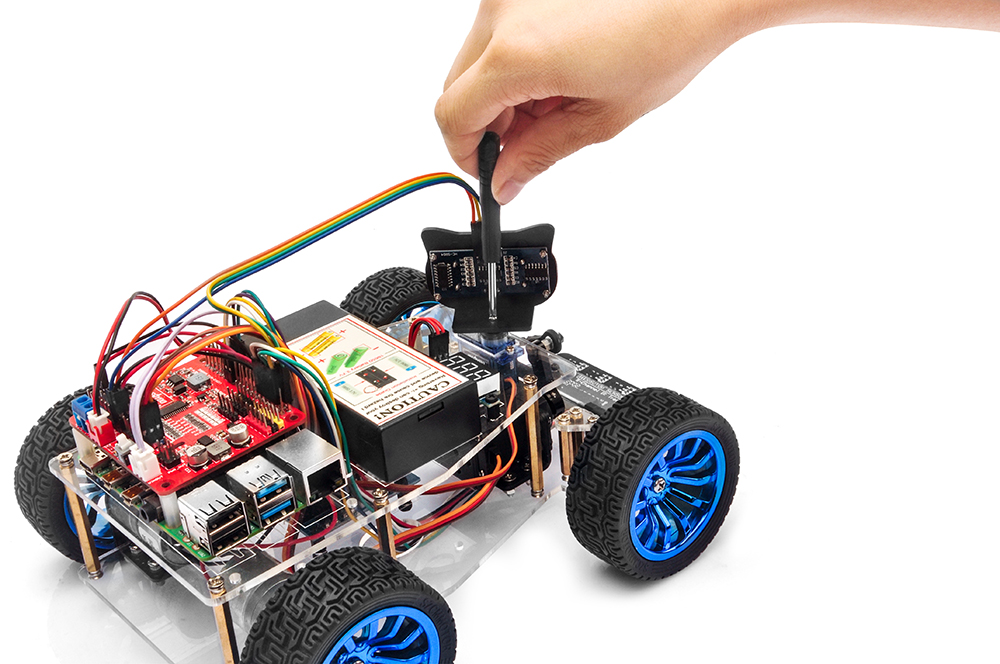
Step 2: サーボモータをシャーシ前部にM2.2*8セルフタッピングネジ2本で取り付ける。

Step 3: 超音波モジュールをマウントホルダにM1.4*8ネジ4本とM1.4ナットで取り付ける。
Step 4:1pcsのM2 * 4セルフタッピングねじでマイクロサーボモータに超音波ホルダーを取り付けます。

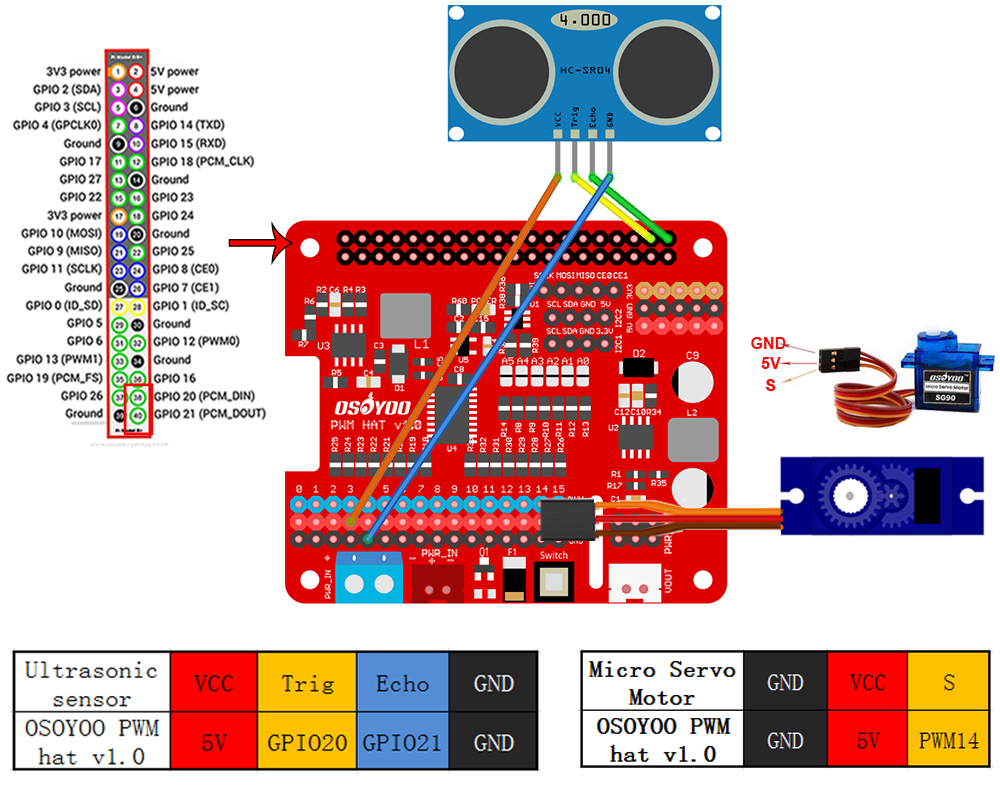
超音波センサホルダSG90サーボモータをOSOYOO PWM HATボードのPWM 14ポートに接続し、超音波モジュールのGNDとVCCをOSOYOO PWM HATボードのGNDと5Vに接続し、超音波モジュールのTRIGとECHOをraspberry piのGPIO20とGPIO21に接続する:

Raspberry Piのターミナルで以下のコマンドを入力し、pythonコードをダウンロードする:
wget http://osoyoo.com/driver/servo-steer-car/pi-obstacle.py
車とサーボのバッテリーをオンにし、プログラムを実行します、
Raspberry PiでPython 2を使用している場合は、次のように入力します:
python pi-obstacle.py
サーボは超音波センサーを3秒間前方に回転させます。センサーが正面を向いていない場合は、電池を切るかCtrl-Cキーを押してプログラムを停止してください。その後、サーボからセンサーを取り外して再度取り付け、センサーが正面を向いていることを確認し、ネジで位置を固定します。
これで車は自動的に障害物回避の自動運転を行います。