オンライン正規代理店
電池付き:
| 米国から購入 |
英国から購入 |
ドイツから購入 |
イタリアから購入 |
フランスから購入 |
スペインから購入 |
日本から購入 |
 |
 |
 |
 |
 |
 |
 |
電池なし:
| Buy from USA |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本から購入 |
|
|
|
|
|
|
|
目的:
は、このレッスンでは、5ライン用トラッキングセンサーのフレームワークをレッスン1の中で追加する事です。もしもレッスン1の組立て作業を完了していなければ再度見直してください
このレッスンのソフトウェアは、トラッキングセンサーからのデーターを読み取り、スマートカーが白い地面上の黒いラインに沿って動く様に自動的に車を導きます
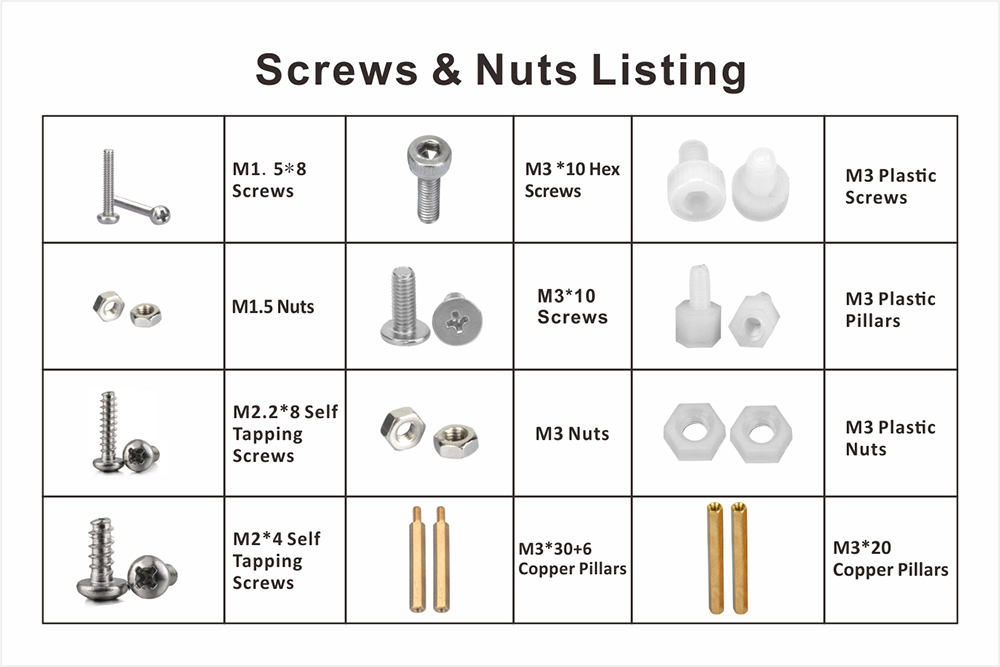
部品とデバイス:
ハードウェアのインストール:
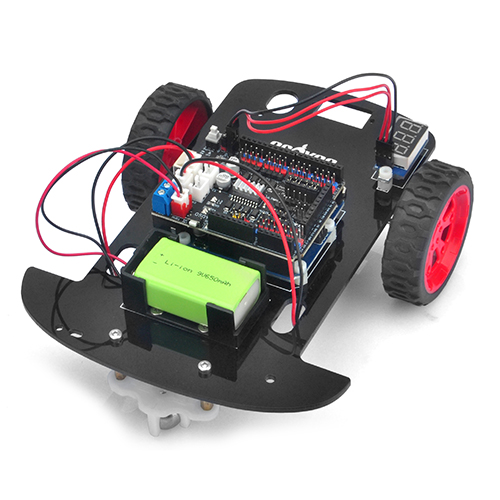
ステップ1: 前のレッスン1 の取付状態からまず始めます。もしレッスン2の組立作業が完了している場合は、何処も変更する事はありませんので、ハードウェアに接続しましたワイヤーそのままにしておいてください。
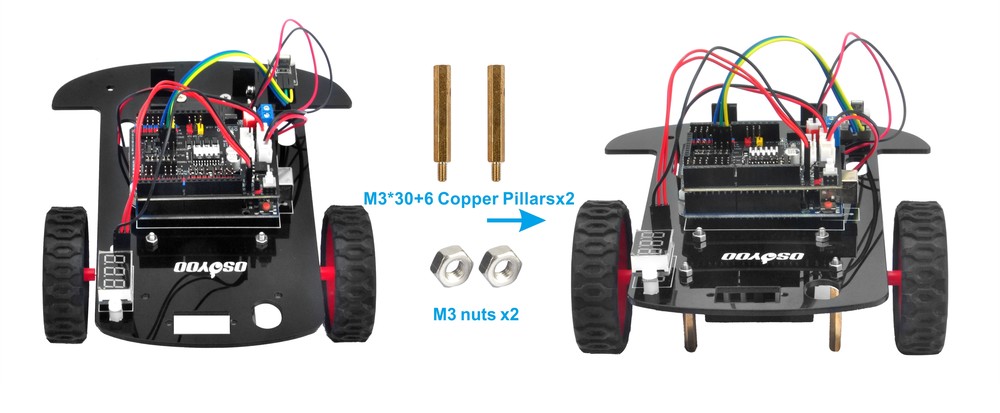
ステップ2: 次の様に5ライン用トラッキングセンサーモジュールを2個のM3*10六角ボルト、M3*30+6の真鍮ピラーとM3ナットで取り付けます。
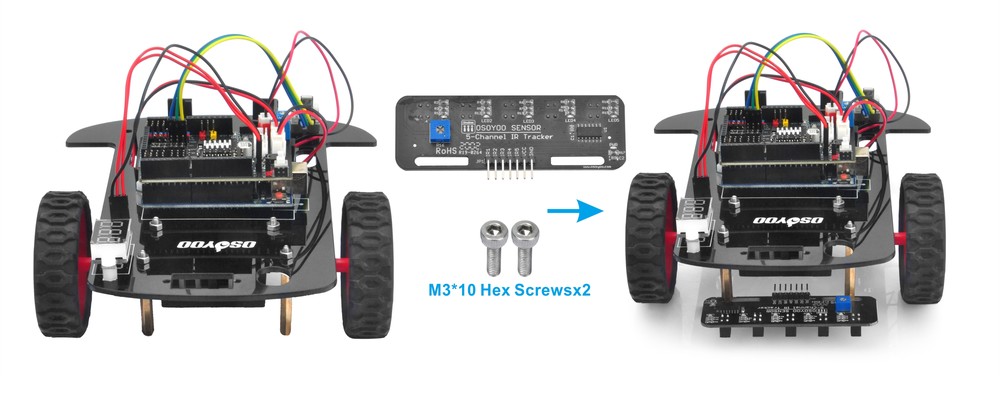
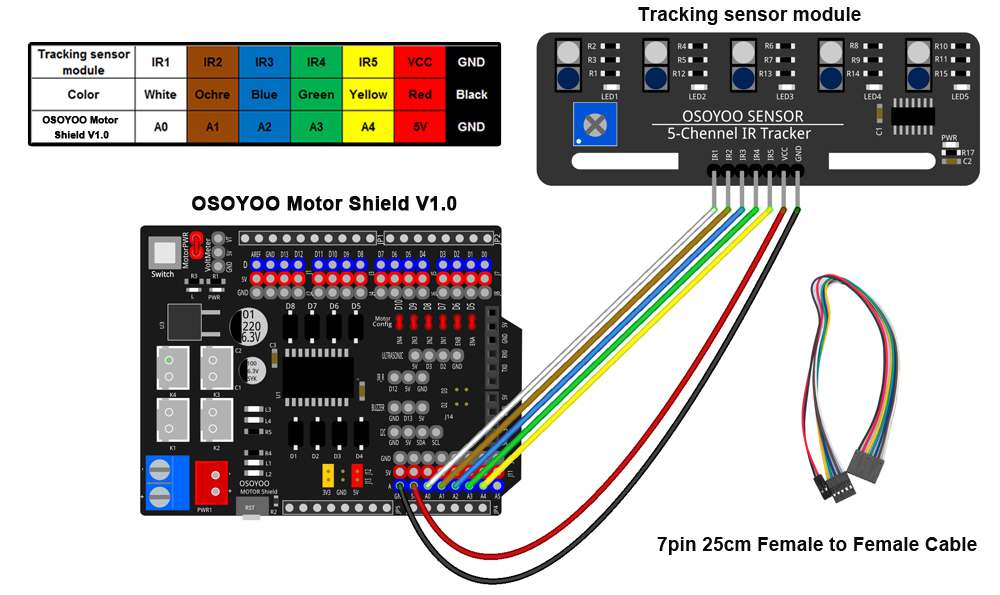
ステップ 3: 次の図の様に各トラッキングセンサーモジュールの端子VCC-GNDをモーターシールドのボード5V-GND端子に接続。
そして各トラッキングセンサー出力信号ピンIR1、IR2、IR3、IR4、IR5ピンをシールドアナログ端子A0、A1、A2、A3、A4に7ピン25cmメス-メスケーブルで接続します (忘れないでください:レッスン1で取り付けられた既存のワイヤーを取り外さないでください):
ソフトウェアのインストール:
ステッ1:
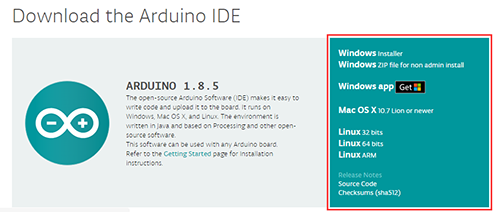
最新のアルドゥイーノIDEのインストール(もしアルドゥイーノIDE バージョン1.1.16以降をすでにお使いでしたら、このステップをスキップしてください.
アルドゥイーノIDをここからダウンロードしてから、そのソフトウェアをhttps://www.arduino.cc/en/Main/Software?setlang=en,インストールします.
ステップ 2: レッスン3サンプルコードをダウンロードします、そしてダウンロードしたlesson3zipファイルを解凍するとlesson3というフォルダーが出来ます
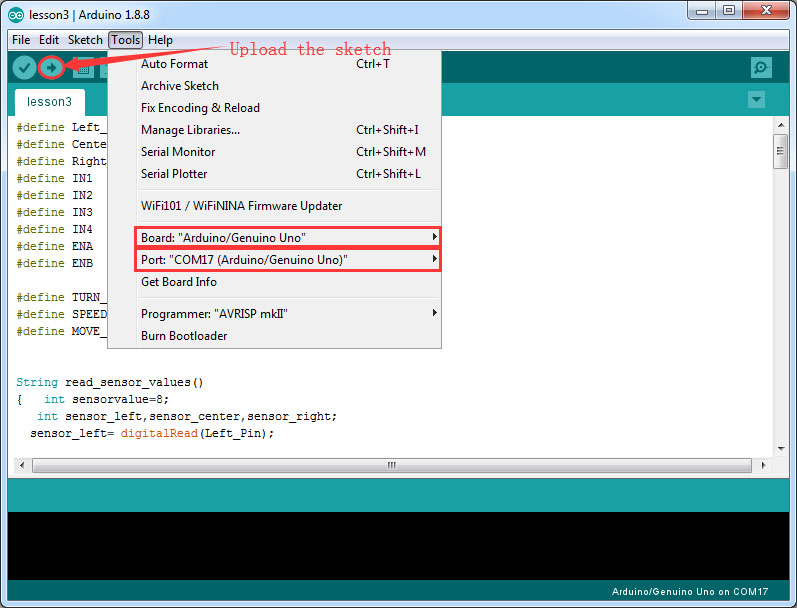
ステップ3: UNO R3ボードをPCにUSBケーブルで接続し、アルドゥイーノIDEを開き>[ファイル]をクリック>[開く]クリック> lesson3フォルダーで「lesson3.ino」コードファイルを選択し、コードをアルドゥイーノにロードします。
注意:スケッチをアルドゥイーノにアップロードする際はバッテリーのスイッチをOFFにするか電源アダプターのプラグを抜いてください。

ステップ4:プロジェクトに対応するボード/シリアルポートを選択して、スケッチをボードにアップロードします。
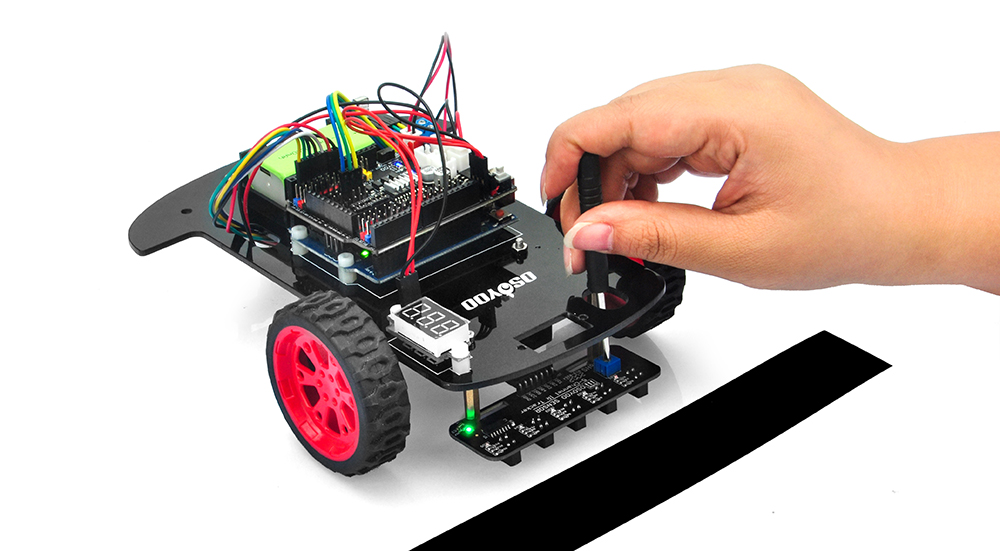
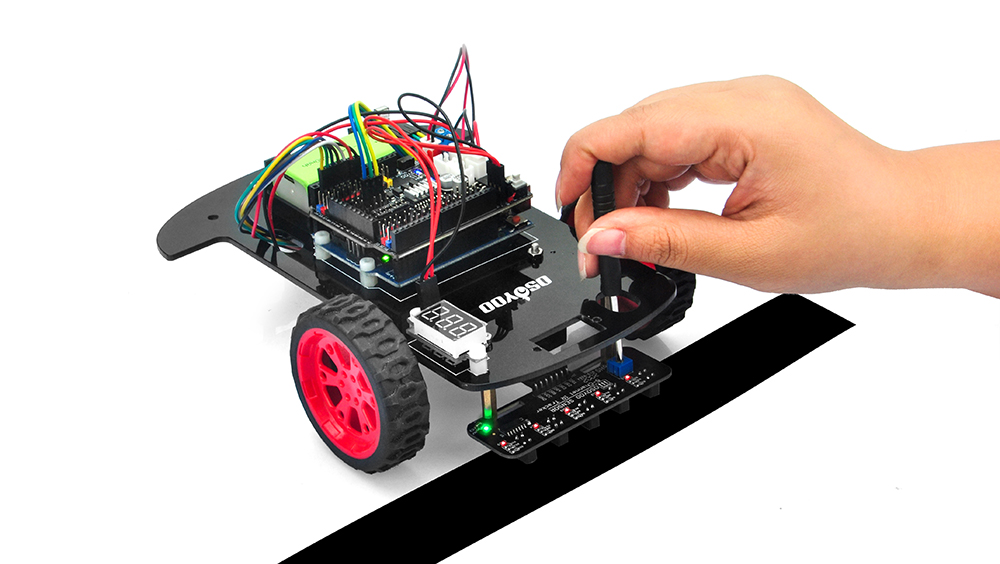
ステップ5: トラッキングセンサーモジュールの感度調整。車の電源をオンにして、車を持ちます、プラスドライバーでトラッキングセンサーのポテンショメーターを調整して、一番よい感度の状態にします。信号はトラックの上にある黒いトラックの上にいる時にLEDライトが点灯し、センサーが白いトラックの上にあるときに消灯する様に調整します
テスト:
<p白い地面に黒トラック(黒トラックの幅は20mm以上30mm未満) を用意します。トラックの曲がり角度は90度を超えることはできませんのでご注意ください。角度が大きすぎると、車はトラックから外れます。
車の電源を入れ、トラッキングセンサーモジュールの中央に黒いトラックを置くと、車は黒いトラックに沿って動き出します。














The code doesn’t work. Sensors are working but even though sensors are having “00001” etc the robot is not moving right. Sometimes it moves randomly.