I. 目的
II.部品と装置
III.ハードウェアのインストール
IV.回線接続
V. ソフトウェアのインストール

| 米国から購入 |
イギリスから購入 |
ドイツから購入 |
イタリアから購入 |
フランスから購入 |
スペインから購入 |
日本から購入 |
 |
 |
 |
 |
 |
 |
 |

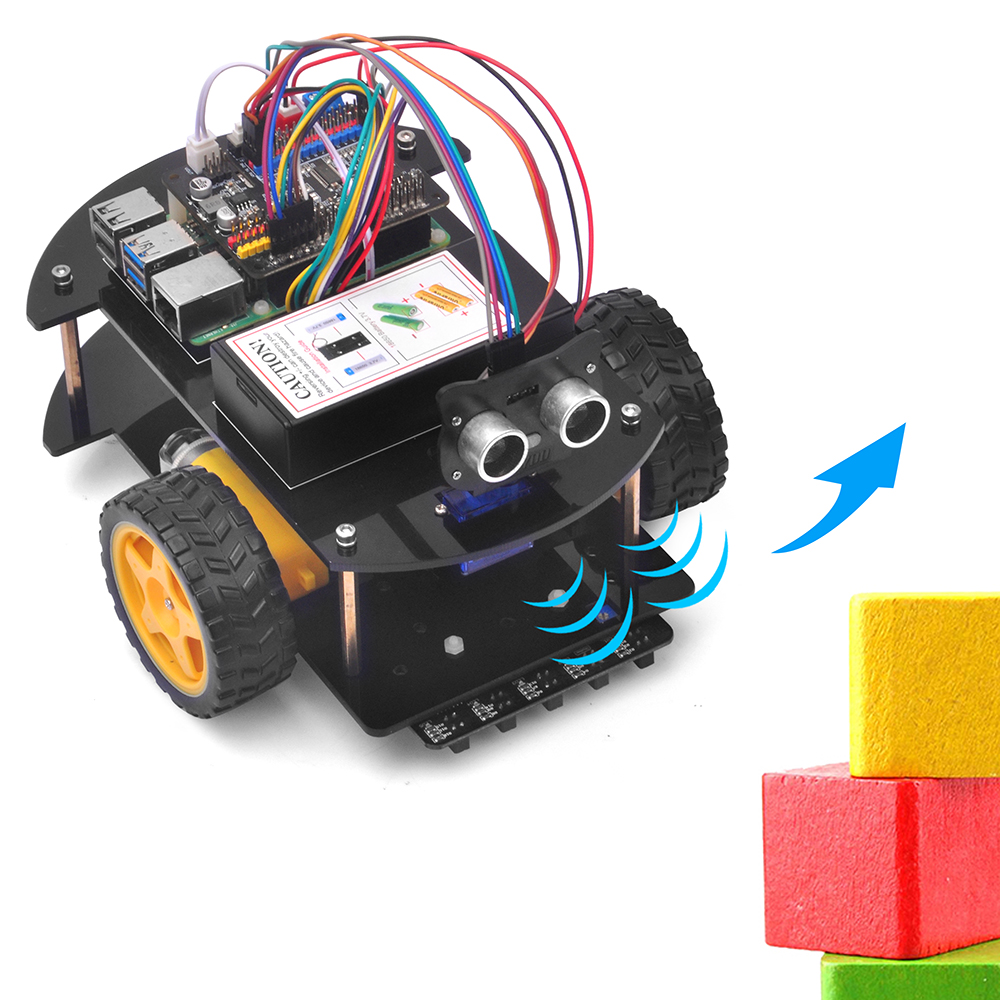
このレッスンでは、Raspberry Piロボットカーは超音波センサーを使用して障害物を検出し、自動運転を行い、衝突を回避します。
このチュートリアルのサンプル コードは Python で記述されています。

| いいえ。 |
画像 |
デバイス |
数量。 |
小物 |
リンク |
| 1 |
 |
超音波センサー |
1 |
M1.5*8ネジ×4
M1.5ナット×4 |
こちらをクリックして購入 |
| 2 |
 |
サーボモータ |
1 |
M2.2*8 セルフタッピングネジ x 2
M2*4 セルフタッピングネジ x 1 |
こちらをクリックして購入 |
| 3 |
 |
超音波センサー用マウントホルダー |
1 |
M1.5*8ネジ×4
M1.5ナット×4
M2*4セルフタッピングネジ×1 |
こちらをクリックして購入 |
| 4 |
 |
20ピンジャンパー線メス-メス20 cm |
幾 |
|
|
| 5 |
 |
プラスドライバー |
1 |
|
こちらをクリックして購入 |

ステップ1:レッスン 1 の基本フレームワークを完了する必要があります。レッスン2のハードウェアインストールが完了している場合は、そのままにしてください。
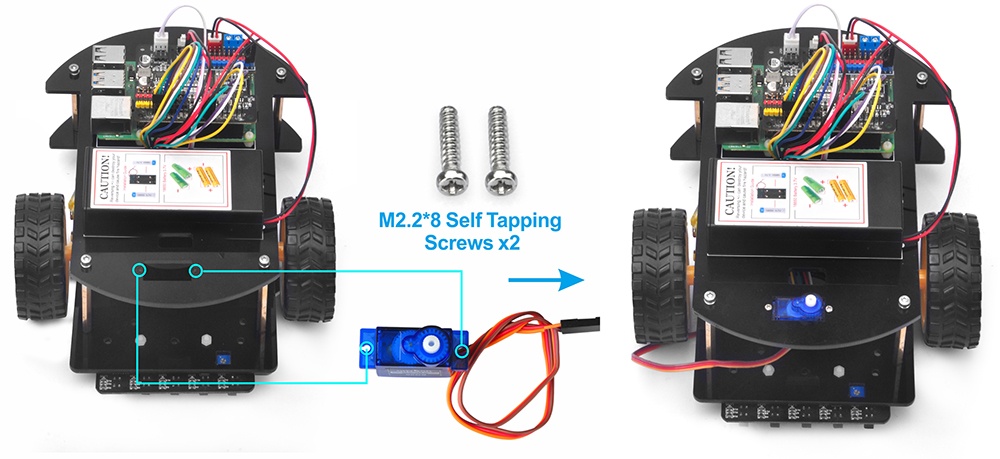
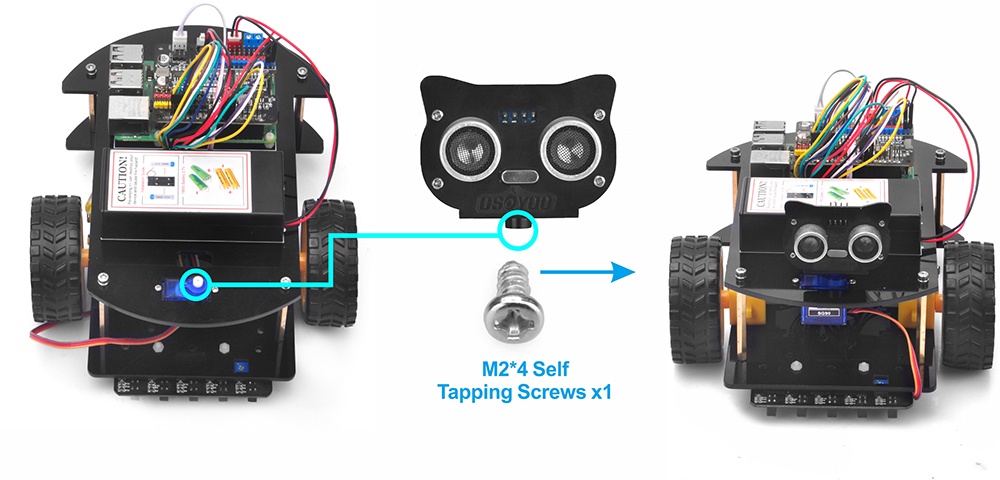
ステップ2:上部車のシャーシの前面にサーボモーターを2本のM2.2 * 8セルフタッピングネジで取り付けます
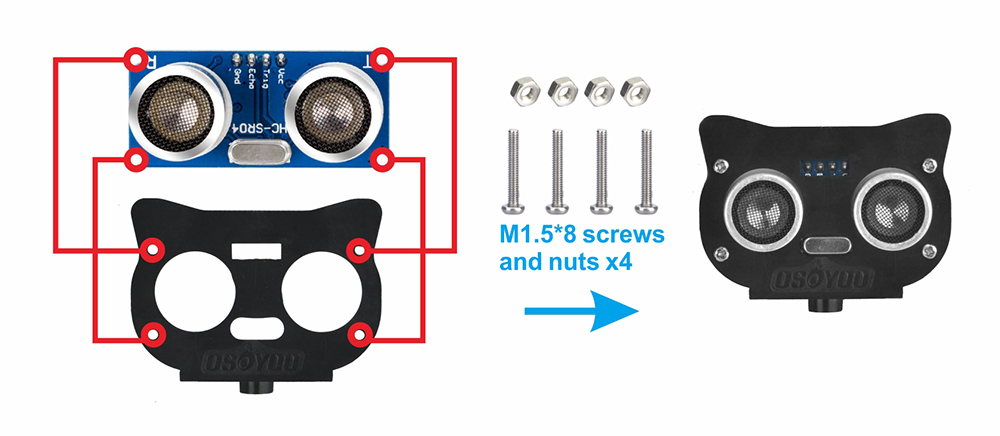
ステップ3:超音波モジュールを4本のM1.5 * 8ネジとM1.5ナットでホルダーを取り付けます
ステップ4:超音波モジュール用マウントホルダーをM2 * 4セルフタッピングネジ付きサーボモーターに取り付けます

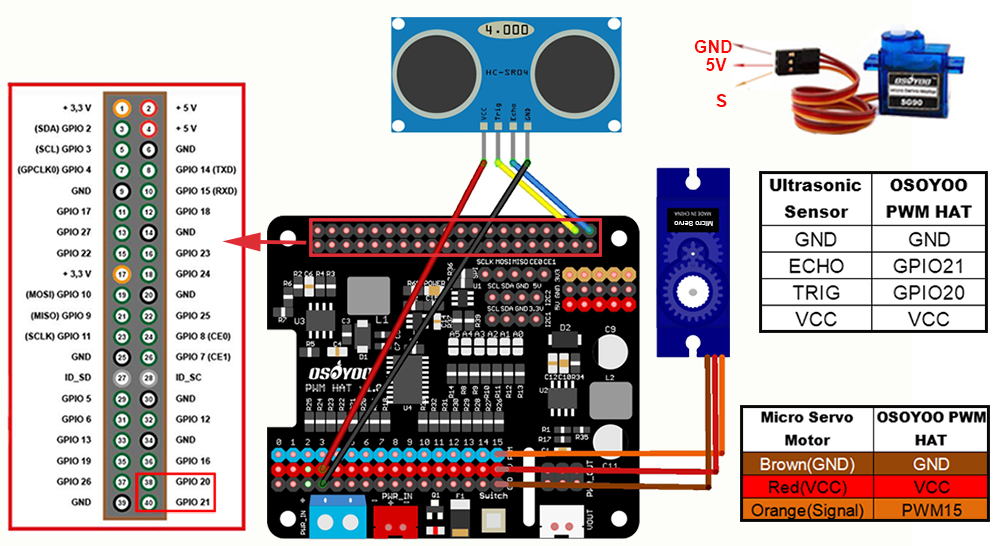
SG90サーボモータをPWM15に接続し、超音波モジュールのGNDとVCCをGNDとV+に接続し、超音波モジュールのTRIGとECHOを下図のようにGPIO20とGPIO21に接続します:

手順 1: rpi.gpio、adafruit-pca9685 ライブラリがインストールされていることを確認し、レッスン1 で I2C を有効にします。
ステップ2:ロボットカーの電源を入れ、RaspberryPiターミナルで次のコマンドを入力してPythonコードをダウンロードします。
wget http://osoyoo.com/driver/picar/picar-obstacle-avoid4.py
ステップ3:ロボットカーを地面に置き、プログラムを実行します(注意:Piボードに応じて正しいコマンドを選択してください)。
python picar-obstacle-avoid4.py
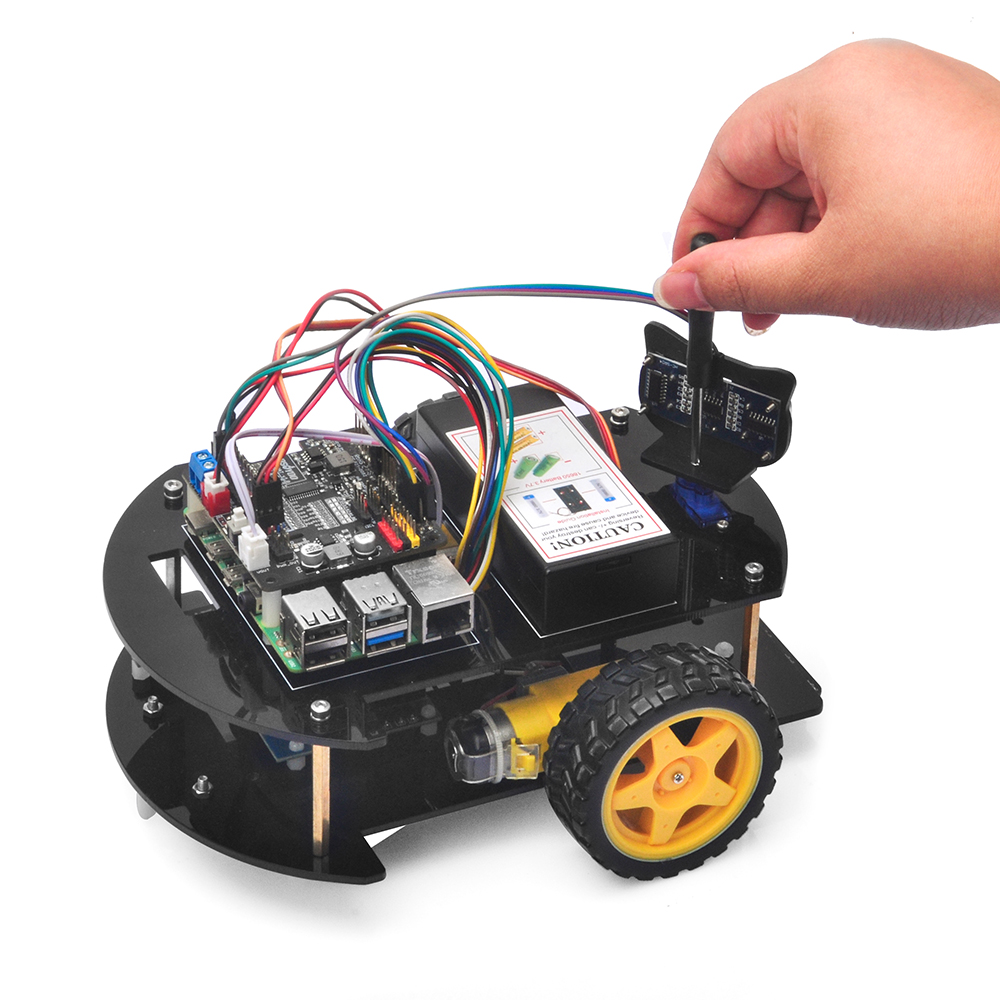
ステップ4:最後のコマンドを実行した後、サーボモーターは超音波センサーを左、右、中央の順に向け、数秒間留まります。超音波センサーが正面を向いていない場合は、すぐにロボットカーの電源を切ってください。次に、サーボから超音波センサーを取り外して再度取り付け、正面を向いていることを確認し、M2 * 4ネジで固定します。
ステップ5:車の電源を入れ直し、同じコマンドpython picar-obstacle-avoid4.py を入力して、プログラムを再度実行します。これで、車は自動的に障害物回避自動運転を行います。