インストールビデオ
VIDEO
認定オンライン小売業者
Buy from OSOYOO
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
Buy from JP
説明
OSOYOO FlexiRover Robot Car Kit for Arduino Mega2560は、上級ユーザー向けに設計された多用途のロボットプラットフォームです。これには、WiFi拡張モジュールを備えたMega2560互換ボードが含まれており、リモート制御と監視が可能です。このキットには4つの強力な520モーターが装備されており、後部モーターには精密制御用のエンコーダーが搭載されているため、ロボットアプリケーションでの正確な動きに最適です。
主な機能:
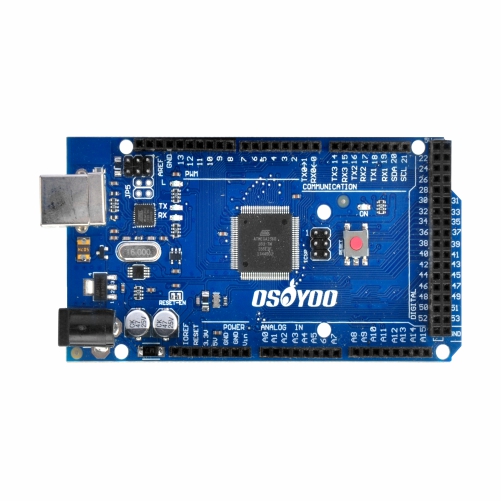
WiFi付きMega2560ボード :Arduino用のMega2560互換ボードとWiFiモジュールを組み合わせることで、リモート制御、IoTアプリケーション、データ伝送のためのワイヤレス接続が可能になり、ロボットプロジェクトの範囲が拡大します。
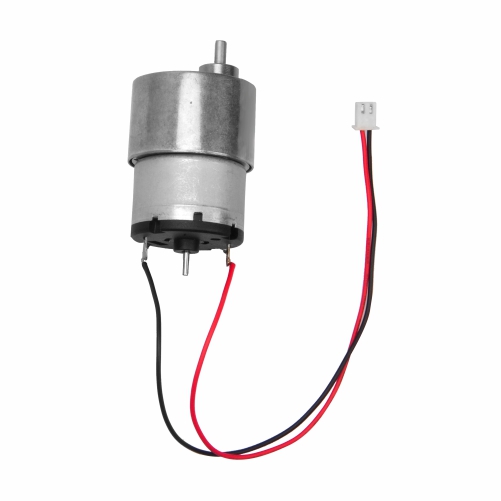
エンコーダー付き520モーター :520モーターはスムーズな動きを保証し、後部エンコーダーは速度と方向の正確な制御を提供し、ナビゲーションと障害物回避タスクに最適です。
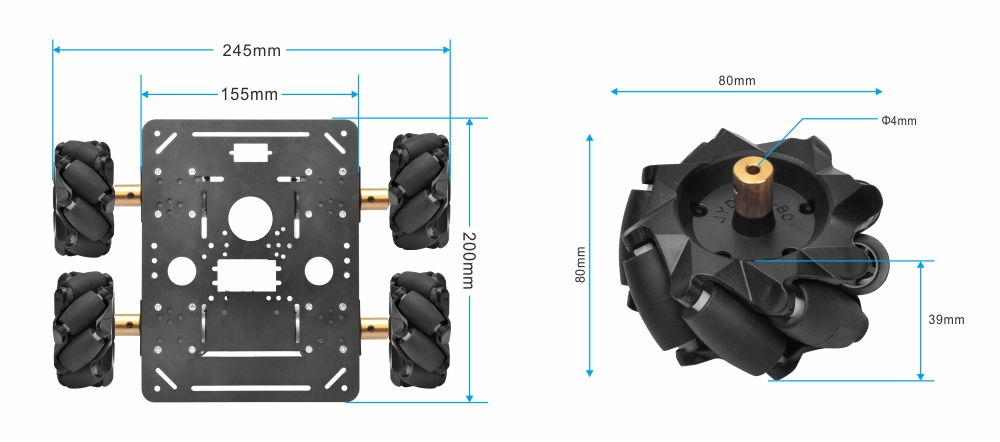
全方向移動用メカナムホイール :付属のメカナムホイールにより、ロボットはあらゆる方向に移動でき、複雑な環境や機敏なナビゲーションを必要とするアプリケーションに多用途に対応できます。
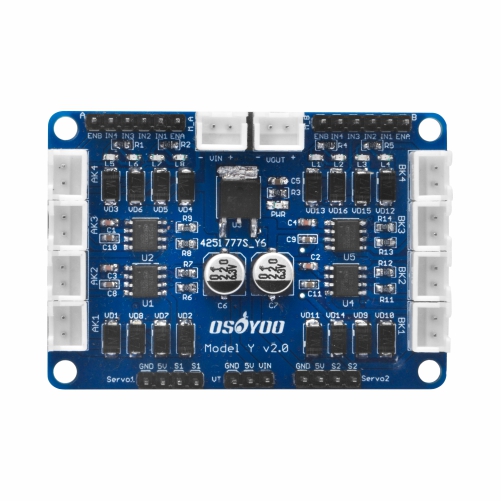
4輪駆動用モータードライバーボード :OSOYOO Model Yモータードライバーボードは、最大4つのモーターを独立して制御し、高度な制御スキームと柔軟な駆動メカニズムを可能にします。
カスタマイズ可能なシャーシ :シャーシには、センサー、アーム、カメラなどの追加コンポーネントを取り付けるための事前に開けられた穴があり、ユーザーが特定のタスクに合わせてロボットをカスタマイズできます。
仕様
No.
写真
デバイス
数量
仕様
購入リンク
1
OSOYOOベーシックボード
1
詳細はこちら 購入はこちら
2
OSOYOO Uart Wi-Fiシールド V1.3
1
詳細はこちら 購入はこちら
3
OSOYOO model Yモータードライバーモジュール
1
詳細はこちら 購入はこちら
4
電圧計
1
詳細はこちら 購入はこちら
5
3in1電源アダプター
1
詳細はこちら 購入はこちら
6
エンコーダー付き520モーター
2
データシート 購入はこちら
7
ケーブル付き520モーター
2
データシート 購入はこちら
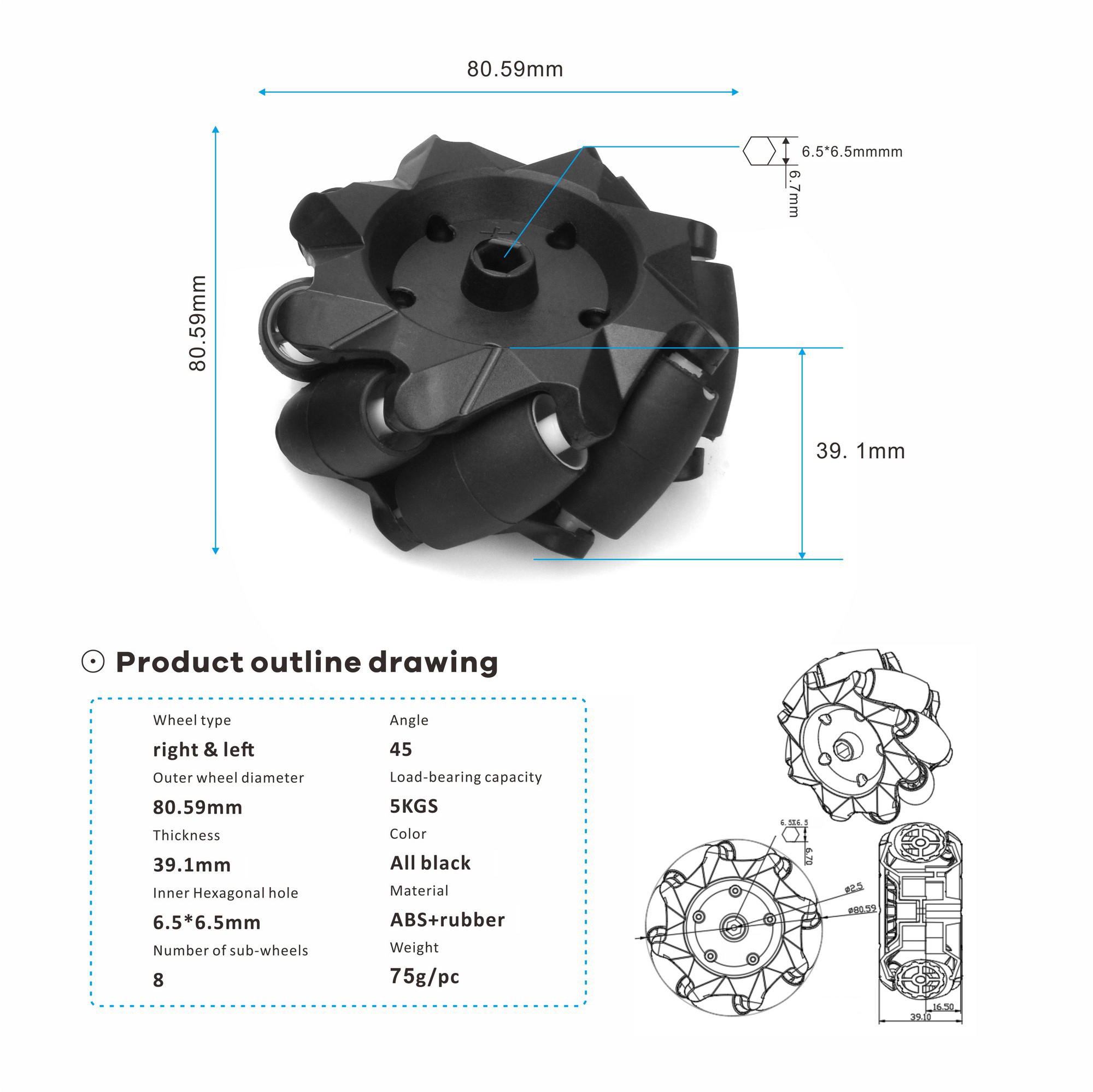
8
メカナムホイール
4
データシート 購入はこちら
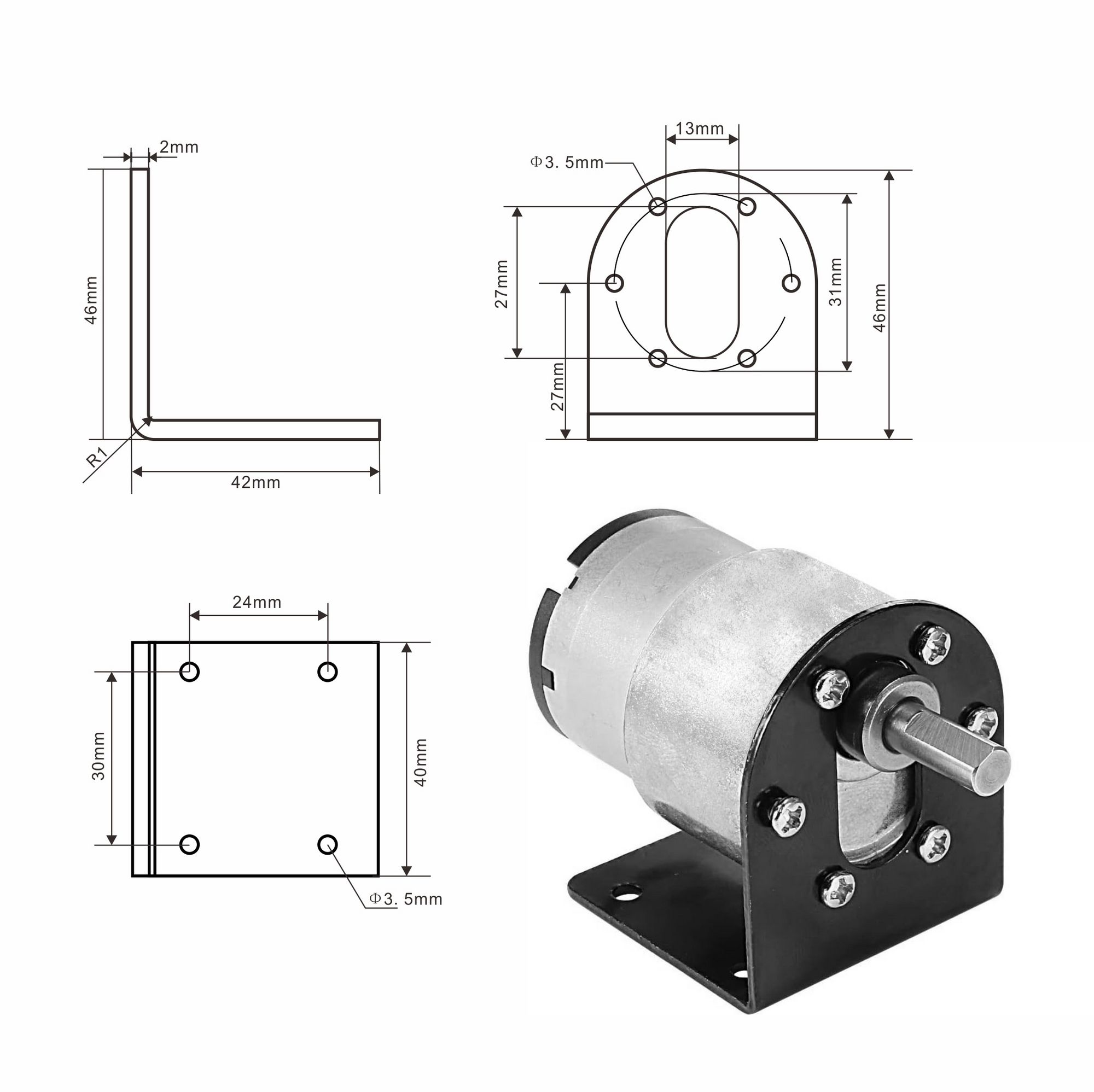
9
37mm金属モーターホルダー
4
適合:37mmギアードモーター ブラケットサイズ:48 x 42 x 40mm 楕円穴サイズ:27 x 13mm ブラケット取り付け穴径:3.5mm 外形図 モデル番号:2018003600
購入はこちら
10
第1層カーシャーシ
1
購入はこちら
11
第2層カーシャーシ
1
購入はこちら
12
第3層カーシャーシ
1
購入はこちら
13
エンコード用ジャンパーワイヤー
2
長さ:25cm
標準2.54mmピッチ
メス-オス、6ピン-6ピン
OSOYOO 520モーターエンコードからArduinoボード 用にカスタマイズモデル番号:2024007000
購入はこちら
14
6ピンオス-6ピンメスジャンパーワイヤー
2
長さ:25cm
標準2.54mmピッチ
一端6ピンXH2.54メスコネクタ、他端6ピン2.54mmピッチオスピン
OSOYOOモータードライバーボード とUNO/Mega/OSOYOO Wifiシールド の接続用にカスタマイズモデル番号:2019004900
購入はこちら
15
3ピンメス-3ピンメスジャンパーワイヤー
1
長さ:15cm
標準2.54mmピッチ
3ピンXH2.54メスコネクタ-3ピンXH2.54メスコネクタ
色:黒-赤-赤
OSOYOO電圧計 とOSOYOOモータードライバーボード の接続用にカスタマイズモデル番号:2018002400
購入はこちら
16
OSOYOO 2ピンPnPケーブル 20cm
1
長さ:20cm
2ピンJST XH2.54メスコネクタ-2ピンJST XH2.54メスコネクタ
OSOYOO WIFIコネクタ とOSOYOOモータードライバーボード の接続用にカスタマイズモデル番号:2019016300
購入はこちら
17
オス-メスジャンパーワイヤー
1
オス-メスジャンパーワイヤー
ケーブル長:20cm(7.9インチ)
2.54mmピッチ 1ピン-1ピン デュポンハウジングコネクタ
分離可能なマルチカラー(10色)柔軟ジャンパーケーブル
モデル番号:2019011100
購入はこちら
18
メス-メスジャンパーワイヤー
1
メス-メスジャンパーワイヤー
ケーブル長:20cm(7.9インチ)
2.54mmピッチ 1ピン-1ピン デュポンハウジングコネクタ
分離可能なマルチカラー(10色)柔軟ジャンパーケーブル
モデル番号:EACW100500
購入はこちら
19
18650バッテリーボックス
2
3.7V 18650バッテリー用
カバー付き2スロットバッテリーホルダー
オン/オフスイッチ付き
2ピンJST XH2.54メスコネクタ
サイズ:約92*43*22mm
ケーブル長:約150mm
モデル番号:2018001700
こちらで購入
20
18650バッテリー用充電器
1
マイクロUSB入力ユニバーサルバッテリー充電器
充電ベイ:2
入力電圧:DC 5V
出力電圧:4.2V/500mah
サイズ:92x42x30 mm
重量:33g
Type C USBケーブル長:500mm
LEDインジケーター付き
互換性:18650、16340、26650、AA、AAA用(バッテリーの長さは30〜68mm)
内蔵保護:短絡、逆極性、不良セル検出、安全タイマー。
モデル番号:2019006900
こちらで購入
21
18650バッテリー(オプション)
1
容量:2000mAh(±3%)。
電圧:3.7V
サイズ:18x67mm
重量:45g/個
モデル番号:2019006800
こちらで購入
22
ネジパッケージ
1
内容:1個のマイナスドライバー、1個の六角レンチ、60個のM3*8ネジ、12セットのM2.5プラスチックネジ+支柱+ナット、4個のM3*65+6銅支柱、10個のM3*40銅支柱、30個のM3*10ネジ+ナット、4個のM2.5*20ネジ、4個のモーターカップリング
モデル番号:2024006100
こちらで購入
非常に拡張性の高いシャーシ
色
名前
互換性
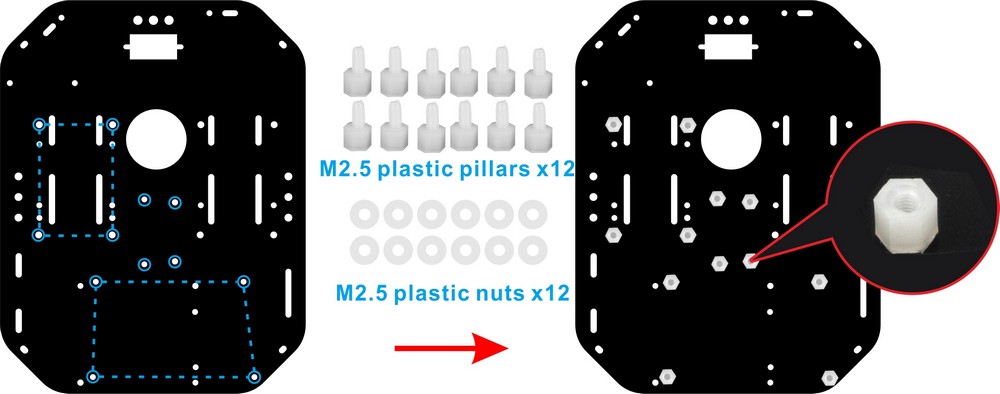
青い円(以下の写真を参照)
37mm金属モーターホルダー —— JGB37-550/545/520…超高トルクモーターと互換性あり
25mm金属モーターホルダー —— JGB25-370/310…高トルクモーターと互換性あり
TT金属モーターホルダー —— TTモーター
赤い円(以下の写真を参照)
OSOYOO Model Yモータードライバー/ OSOYOO Model Xモータードライバー/ L298Nモータードライバー用
緑の円(以下の写真を参照)
SG90/MG995/MG996サーボモーター用
黄色の円(以下の写真を参照)
18650バッテリーケース/9Vバッテリーケースなど用
ピンク紫の円(以下の写真を参照)
ライントラッキングセンサー/OSOYOO 5チャンネルトラッキングセンサー/IR障害物/IRレシーバー/IRトランスミッターなど用
紫の円(以下の写真を参照)
Arduino UNO R3 / Arduino UNO R4 / Arduino UNO WIFIなど用
Arduino Mega2560 / Arduino DUE用
濃い青の円(以下の写真を参照)
Raspberry Pi 5/4/3B/3A+/3B+/2B用
パッケージリスト
デバイスのインストール
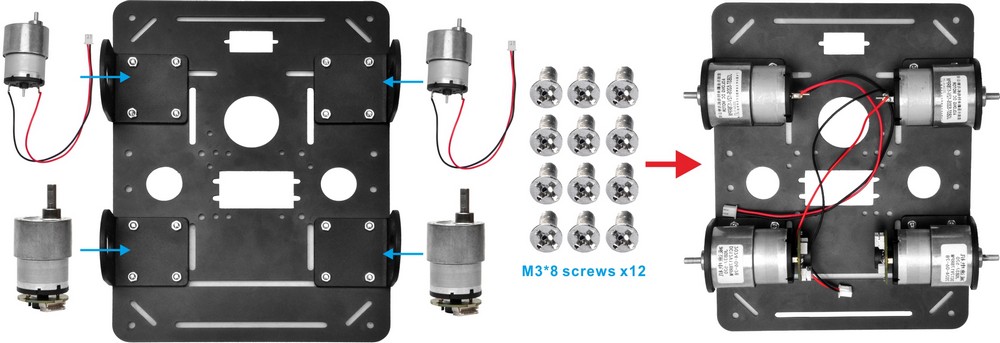
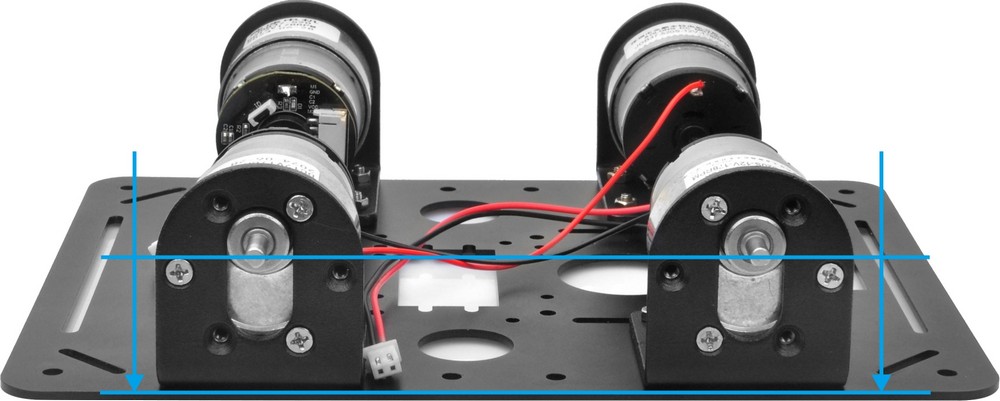
ステップ1. 以下の写真のように、M3*10ネジとM3ナットを使用して、ギアモーターホルダーを第1層カーシャーシ(金属)に取り付けます。ステップ2. シャーシの前面にあるギアモーターホルダーに2個のケーブル付き520ギアモーター を、シャーシの背面にあるギアモーターホルダーに2個のエンコード付き520モーター をM3*8ネジで取り付けます。
注: 4つのモーターの軸を同じ高さに保ってください。
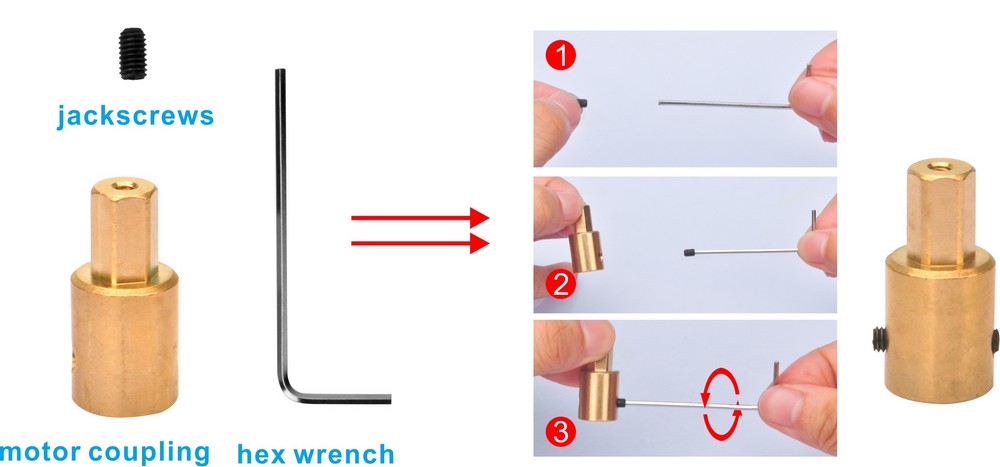
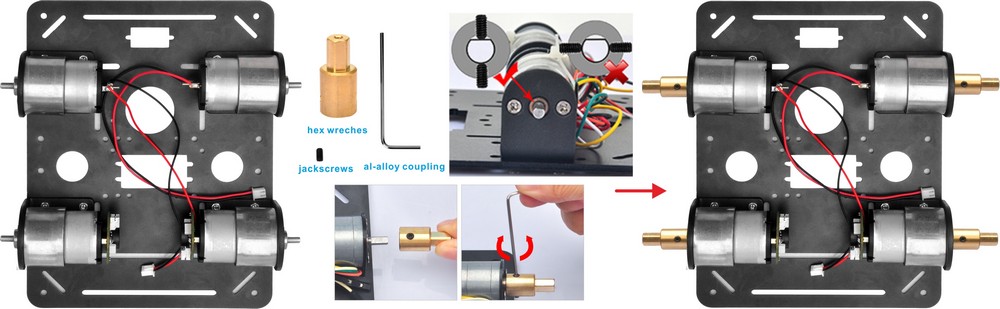
ステップ3. 以下の写真のように、Al-alloyカップリングにジャックネジを取り付け、ジャックネジを締めてAl-alloyカップリングをモーターに固定します。注:520ギアモーターの軸には平らな面があります。ジャックネジの1つがこの平らな面に配置されていることを確認し、両方のジャックネジを軸に締めます。
ステップ4. 以下の写真のように、4個のM2.5*20を使用して、4個のメカナムホイール をAl-alloyカップリングに取り付けます。
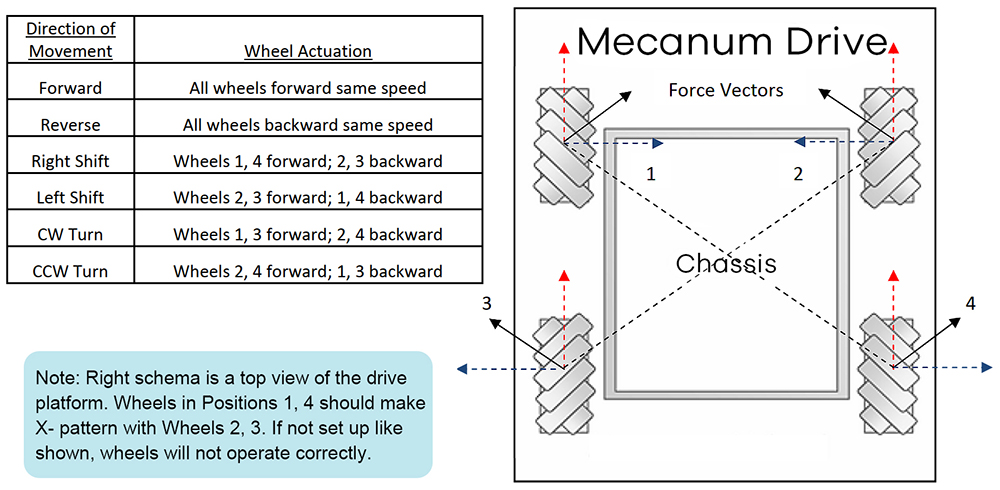
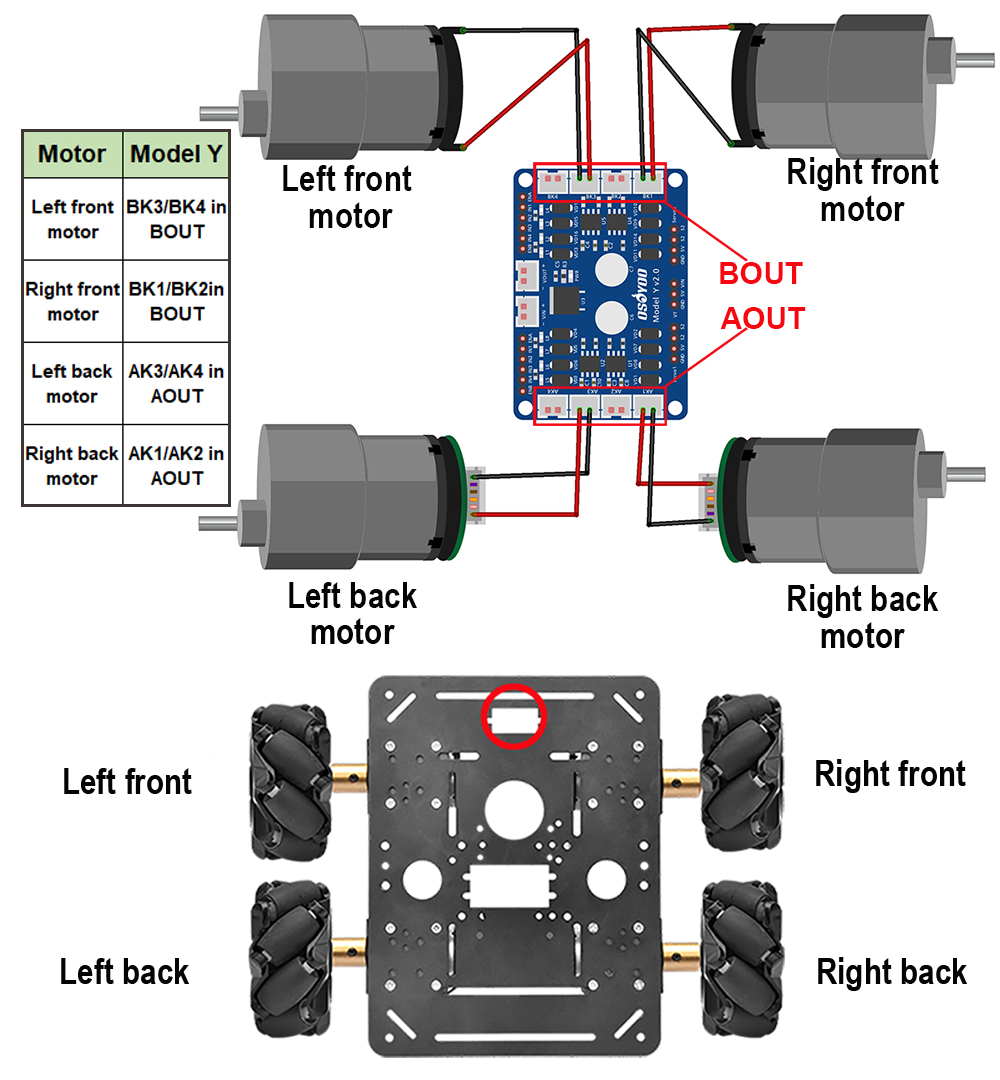
注:メカナムホイールには左右の2種類があります。違いはローラーの向きです。正しい構成では、各ホイールのトップローラーの回転軸がプラットフォームの中心を指すように、以下の図に示すように4つのホイールそれぞれが設定されている必要があります。すべての動的解析と事前に記述されたコードはこの構成に基づいていることに注意してください。
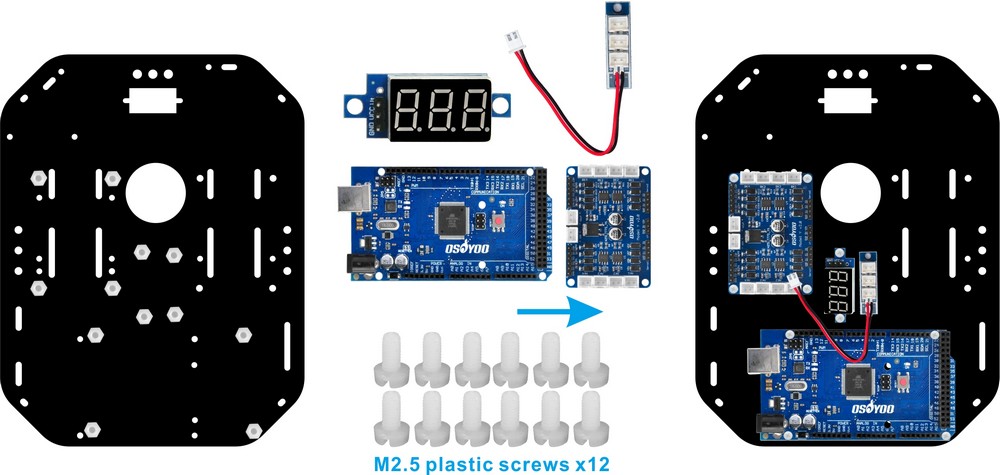
ステップ5. 第2層カーシャーシ(アクリル)に12個のM2.5プラスチック支柱とナットを取り付け、次に3 in 1電源アダプター 、電圧計 、Mega2560用OSOYOOコントロールボード 、およびOSOYOO Model Yモータードライバーモジュール をM2.5プラスチックネジで固定します。
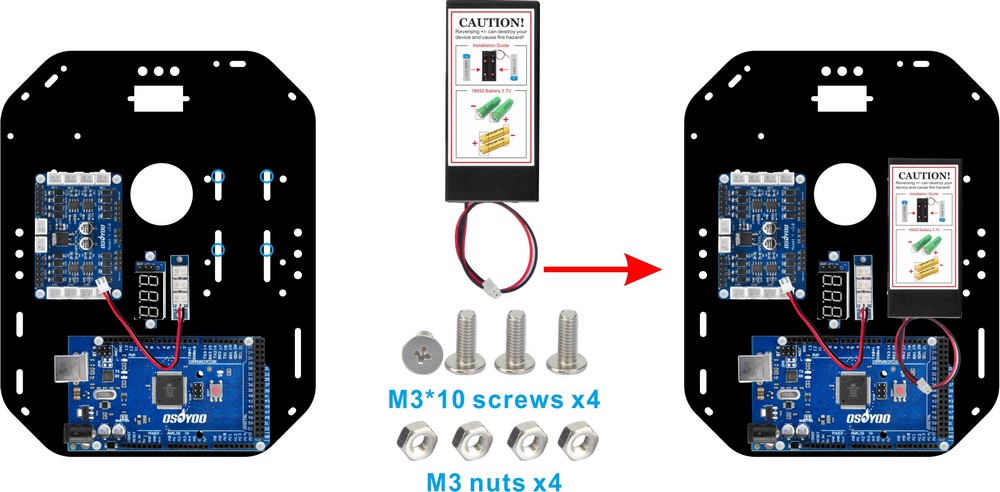
ステップ6. 以下の写真のように、4個のM3x10ネジとナットを使用して、バッテリーボックスを第2層カーシャーシに取り付けます。
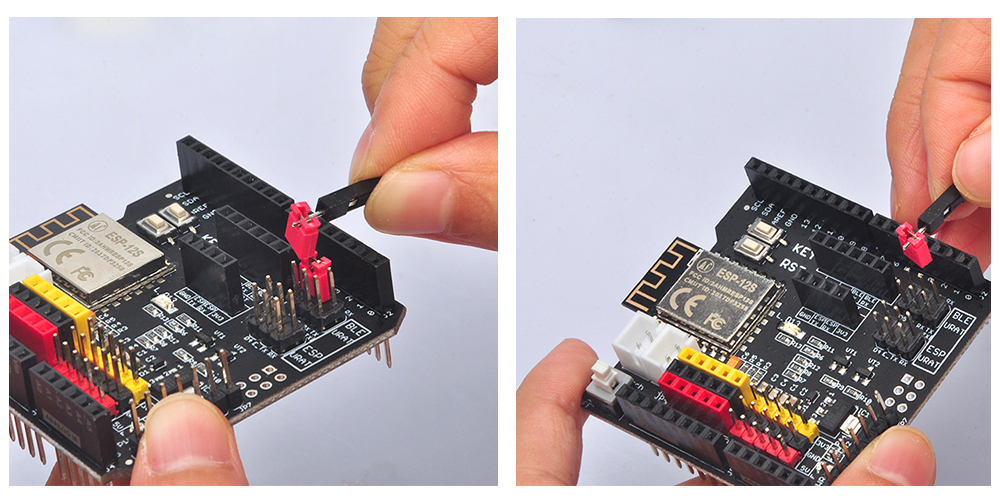
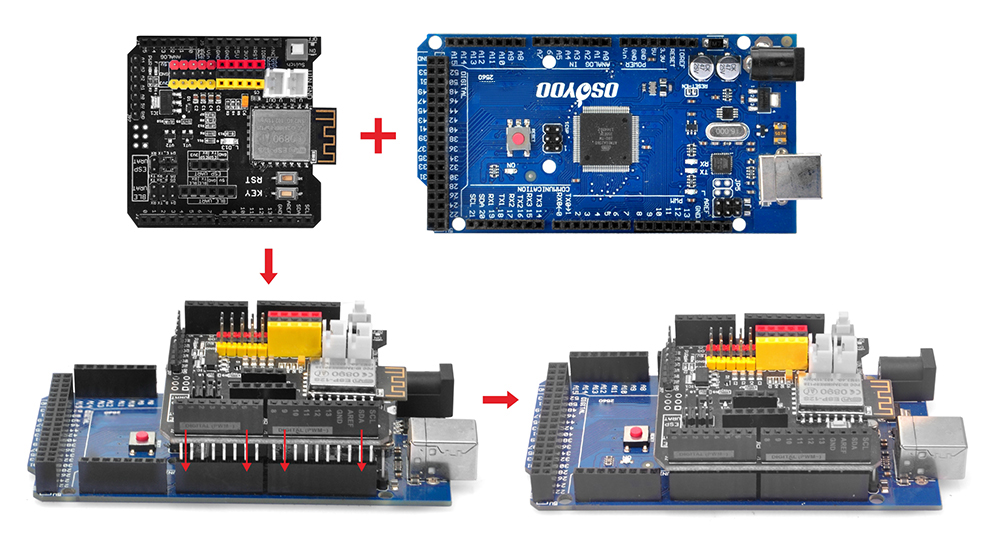
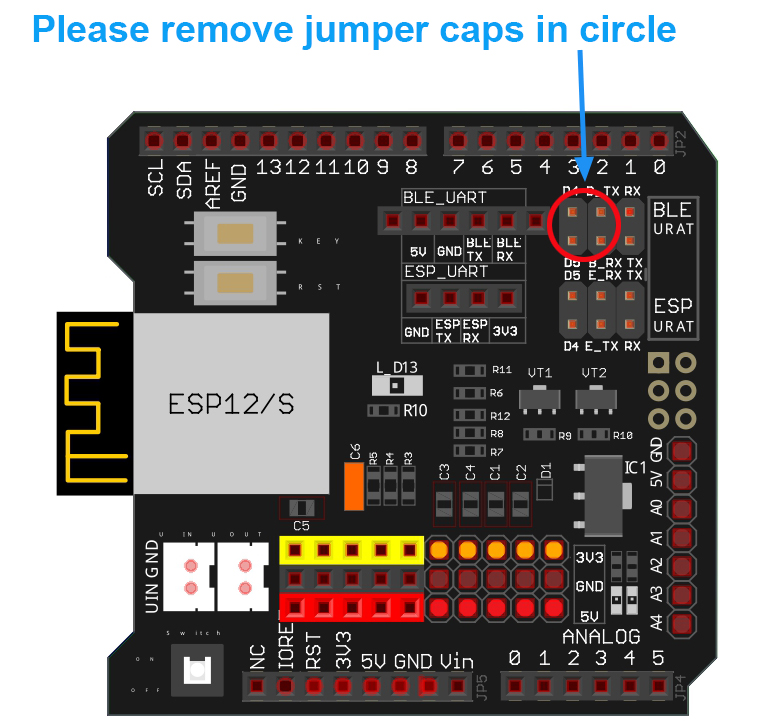
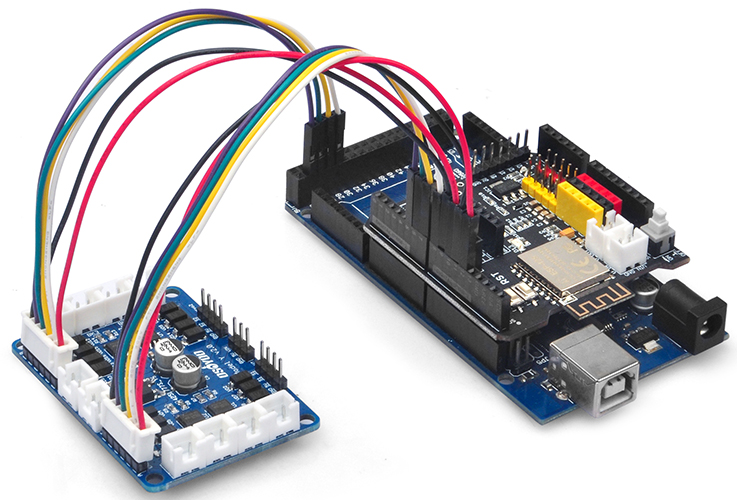
ステップ7. ジャンパーキャップ OSOYOO Wi-Fiシールド から2つ取り外し、以下の写真のようにMega2560用OSOYOOコントロールボード に挿入します。
0. 配線を接続する前に、OSOYOO Wi-Fiシールド をMega用コントロールボード に挿入し、赤いジャンパーキャップ
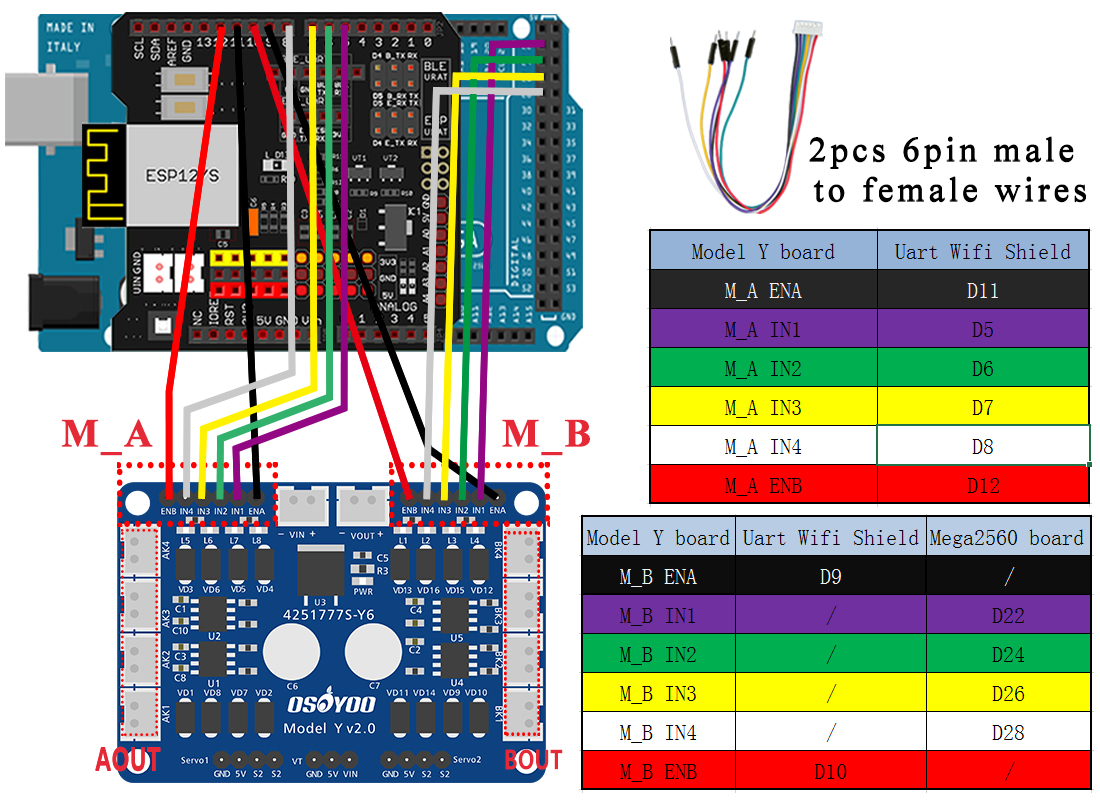
2. Model YのM_A ENA, IN1, IN2, IN3, IN4, ENB をWi-FiシールドのD11, D5, D6, D7, D8, D12 に接続します。
Model YのM-B ENA, ENB をWi-FiシールドのD9, D10 に接続し、Model YのM_B IN1,IN2,IN3,IN4 をOSOYOO Mega2560用コントロールボードのD22,D24,D26,D28 に接続します。
注意:
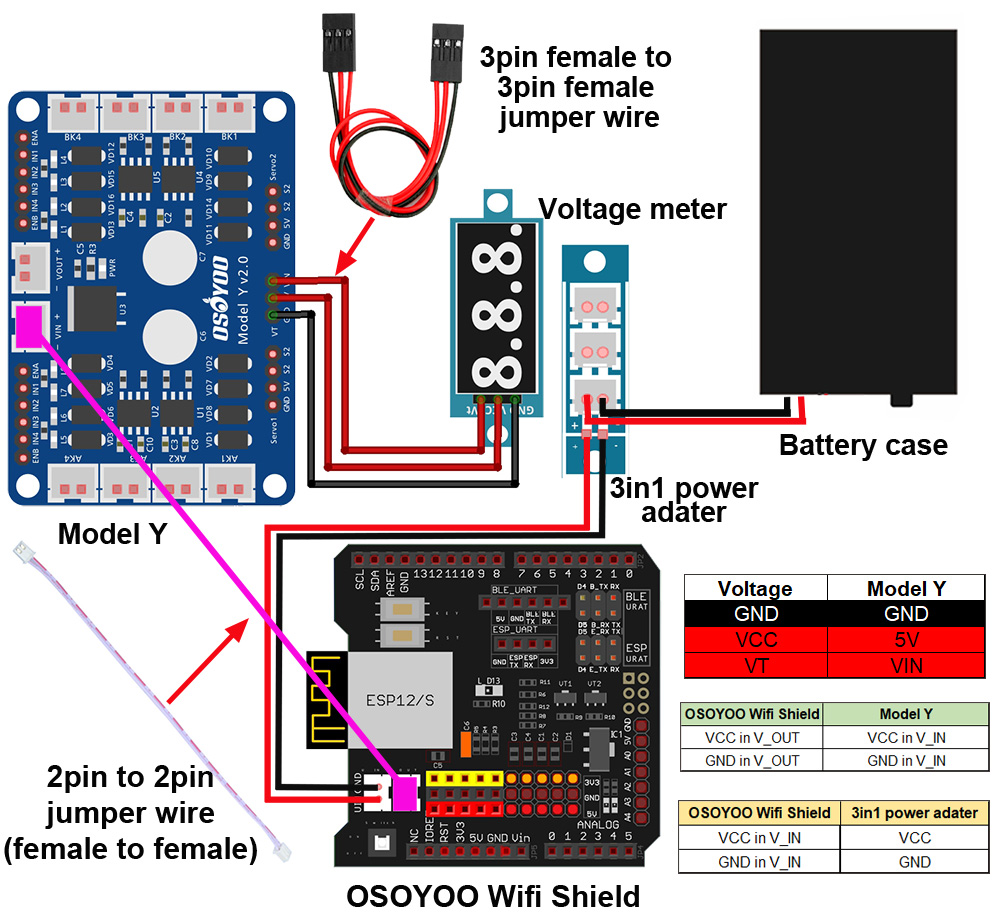
3. 3ピンメス-3ピンメスジャンパーワイヤーを使用して電圧計をModel Yモータードライバーボードに接続します。OSOYOO WIFIシールドのV_OUTソケットを2ピン-2ピンジャンパーワイヤー(メス-メス)を使用してModel YモータードライバーボードのVINソケットに接続します。バッテリーケースの2ピンプラグを3in1電源アダプターに挿入します。3in1電源アダプターの2ピンプラグをOSOYOO WIFIシールドのV_INソケットに挿入します。
注:3in1電源アダプターは、同じ電圧の複数のバッテリーケース用です。
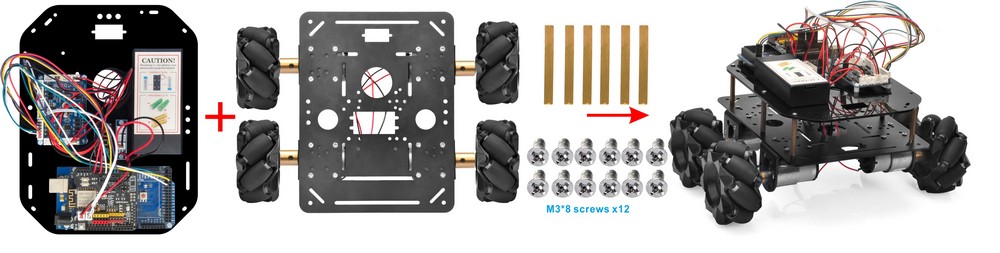
4. M3*40支柱を使用して、第2層カーシャーシを第1層カーシャーシに取り付けます。アクリルシャーシと金属シャーシの前面と背面に注意してください。このステップを完了すると、ロボットカーは動作します。
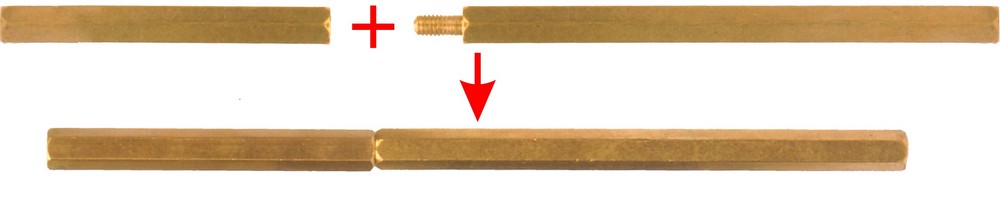
5. さらにセンサーを追加したい場合は、ロボットカーに第3層カーシャーシを取り付けることができます。まず、M3*40銅支柱をM3*65+6銅支柱にしっかりとねじ込んで長い支柱にし、次にこれらの長い支柱を使用して第3層カーシャーシを第1層カーシャーシに取り付けます。
ステップ1: 最新のArduino IDEをインストールします(Arduino IDEのバージョンが1.1.16以降の場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:https://osoyoo.com/driver/mecanum_metal_chassis_m2/m2-lesson1.zip をダウンロードし、ダウンロードしたm2-lesson1.zipというzipファイルを解凍すると、m2-lesson1というフォルダが表示されます。
ステップ3: USBケーブルでMega2560ボードをPCに接続し、Arduino IDEを開き、ファイル→開く→lesson1フォルダ内のコード「lesson1.ino」を選択し、コードをArduinoにロードします。
ステップ4: プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
ArduinoをPCから切断し、バッテリーをバッテリーボックスに入れます。車を地面に置き、OSOYOO Uart Wi-Fiシールドのスイッチとバッテリーボックスのスイッチをオンにします。
車は
前進→後退→左折→右折→右平行移動→左平行移動→右上斜め→左下斜め→左上斜め→右下斜め に移動します。












































{kind=link}
{kind=link}