Modèle 2021006600
La roue Mecanum Omni direction est une roue très intéressante qui permet à une voiture robot de réaliser des mouvements omnidirectionnels (par exemple, un déplacement parallèle vers la gauche et la droite).
Dans ce projet, nous allons montrer comment utiliser Arduino pour contrôler une voiture robot à roues Mecanum de marque Osoyoo afin d’effectuer quelques mouvements de base, notamment avancer, reculer, tourner à gauche, tourner à droite, déplacement parallèle vers la gauche, déplacement parallèle vers la droite, etc.
Cette leçon vous montre également comment installer le châssis de cette voiture et connecter les fils de signal de contrôle Arduino au modèle de carte Y. Cette installation sera le point de départ de nos autres leçons.
Télécharger les tutoriels PDF:https://osoyoo.com/manual/2021006600.pdf
Vidéo d’installation de la voiture robot OSOYOO : https://osoyoo.com/manual/2021006600.html
Châssis de voiture robotique à roues Mecanum OSOYOO x1
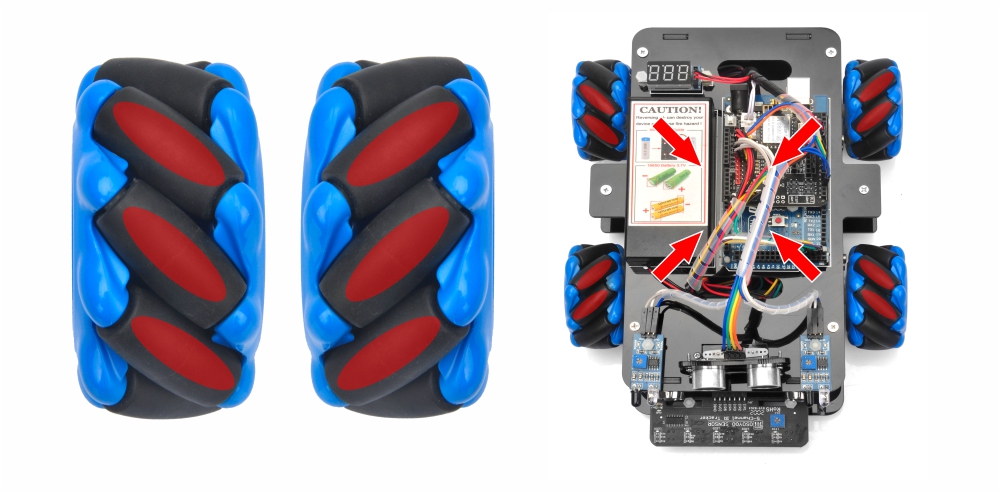
Roues et moteurs OSOYOO x4 (roues gauche x2/roues droite x2)
Carte OSOYOO Mega2560 entièrement compatible avec Arduino UNO/Mega2560 x1
Module WiFi OSOYOO Uart x1
Carte de pilote de moteur OSOYOO Modèle Y
(intégrée avec deux modules TB6612 H-Bridge Driver permettant de contrôler 4 canaux séparés et 8 ports de sortie PWM)
Voltmètre OSOYOO x1
Boîtier de batterie OSOYOO x1
Câble d’extension mâle vers femelle à 6 broches OSOYOO x2
Câble d’extension femelle vers femelle à 3 broches OSOYOO x1
Connecteur femelle à femelle PnP à 2 broches OSOYOO x1
Batteries 18650 (3,7V) x2
Chargeur de batterie x1
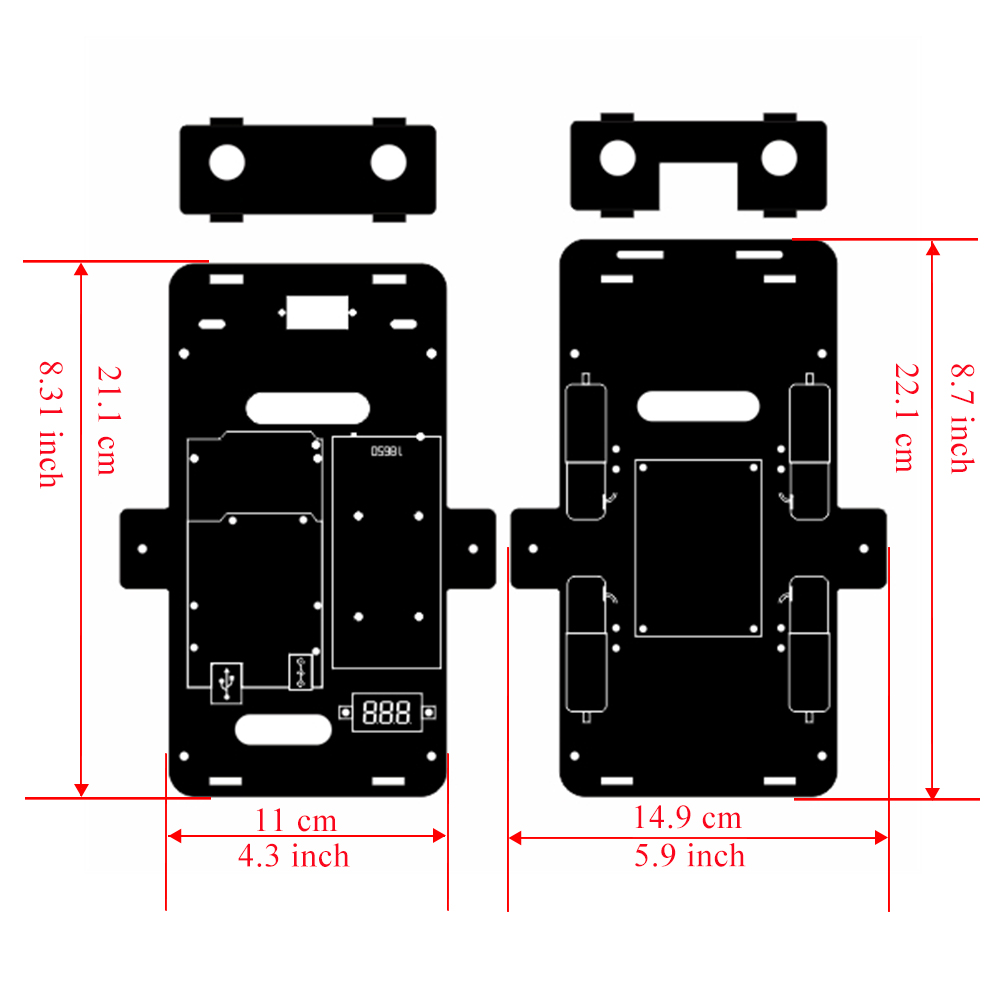
Dimension
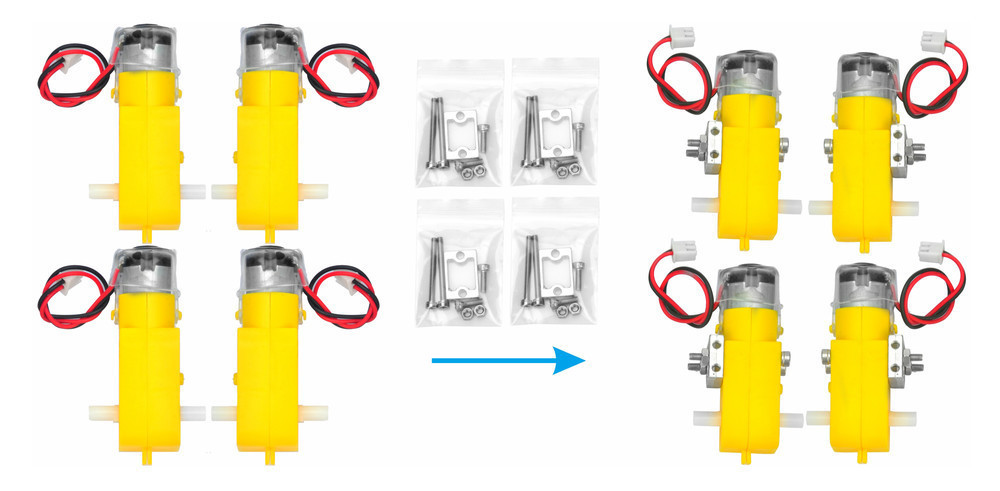
1)Fixez les 4 moteurs avec les supports de moteur en métal comme suit. (Veuillez vérifier la direction du moteur avant d’installer les supports de moteur en métal.)
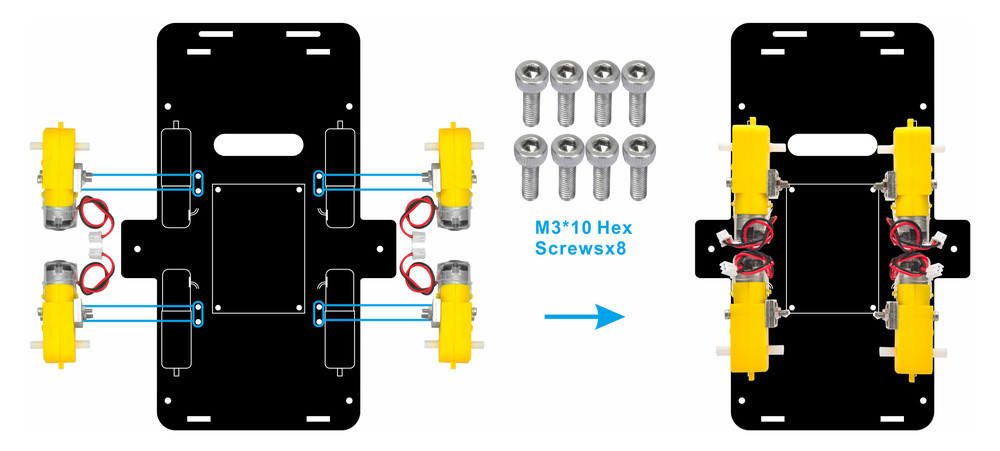
2) Fixez les 4 moteurs sur le châssis inférieur de la voiture avec des vis hexagonales M3*10 à l’aide d’un tournevis hexagonal. (Les vis pour cette étape se trouvent dans l’emballage des supports de moteur en métal.)
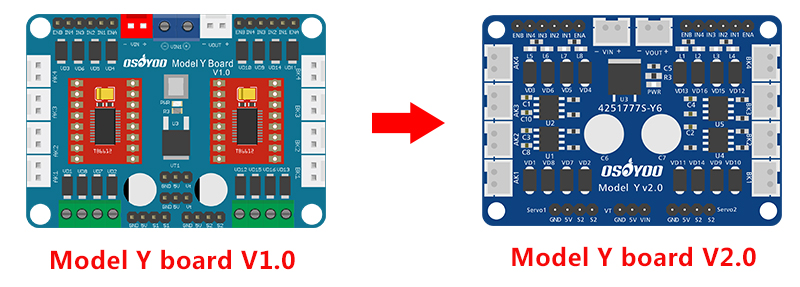
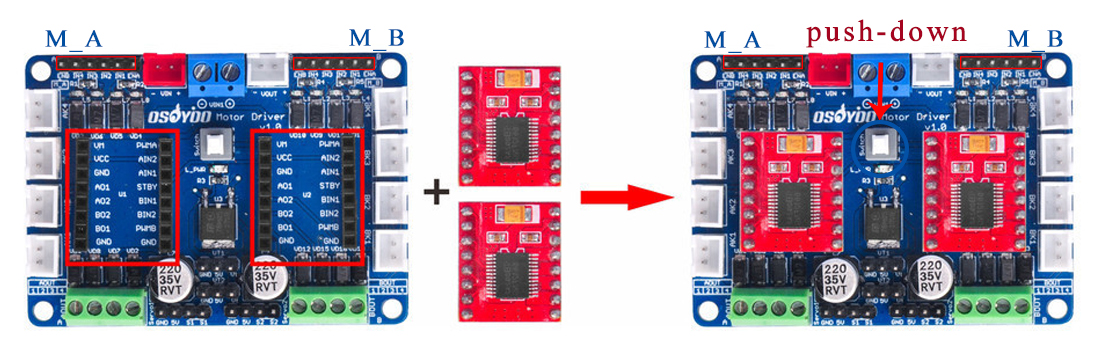
3)Insérez le module TB6612 sur la carte de pilote de moteur modèle Y d’OSOYOO.
Si vous recevez la version mise à jour de la carte de pilote de moteur modèle Y V2.0 comme suit, passez à l’étape 3).
Remarque : Le bouton blanc a deux états, ENFONCÉ et SOULEVÉ, et assurez-vous que le bouton est en position ENFONCÉE.
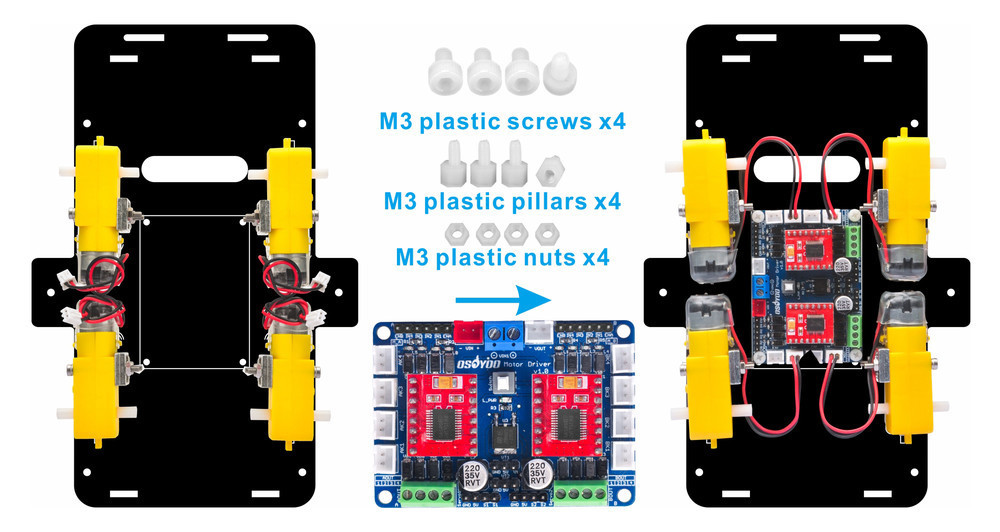
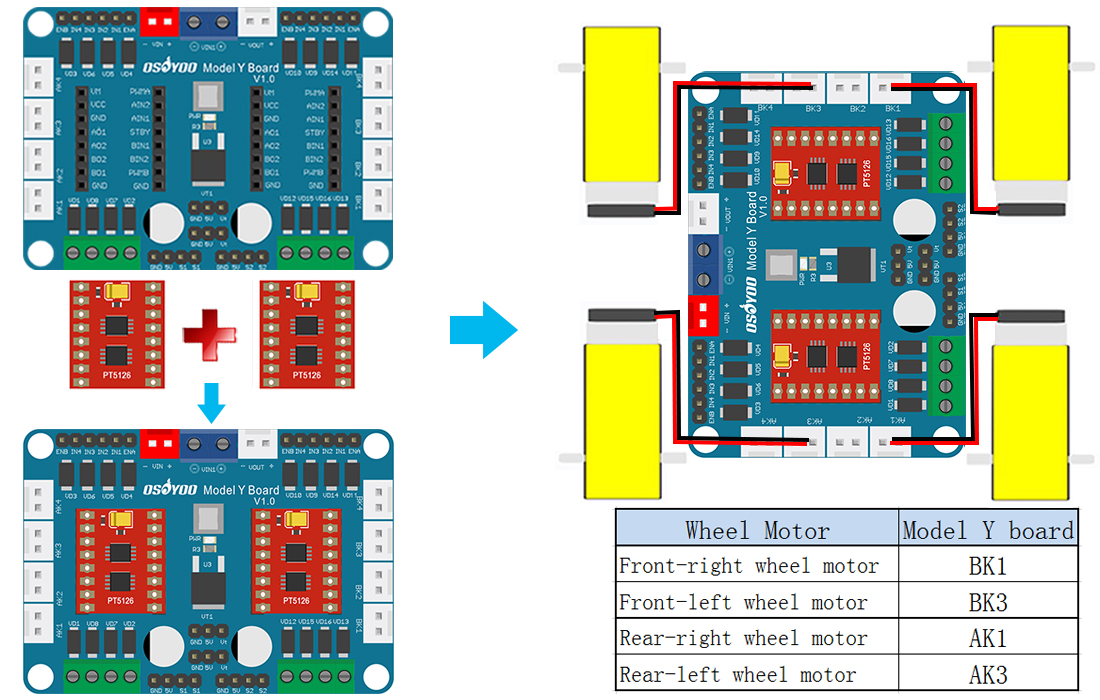
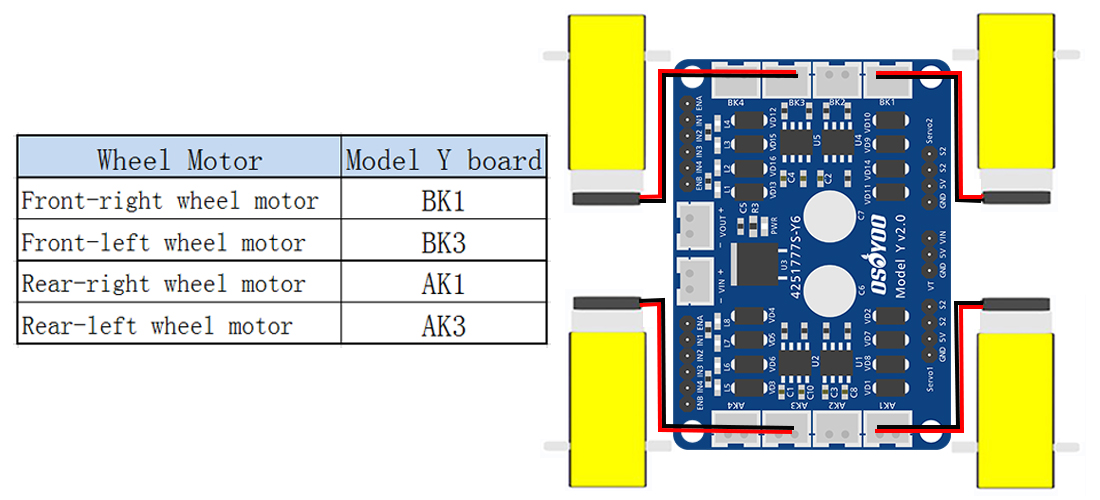
4) Installez la carte de pilote de moteur modèle Y d’OSOYOO sur le châssis inférieur de la voiture avec 4 vis en plastique M3, des entretoises en plastique et des écrous en plastique. Et connectez les 4 moteurs aux prises K1 et K3 de la carte de moteur modèle Y selon le schéma suivant.
(Assurez-vous d’installer la carte de pilote de moteur OSOYOO MODEL Y dans la bonne direction.)
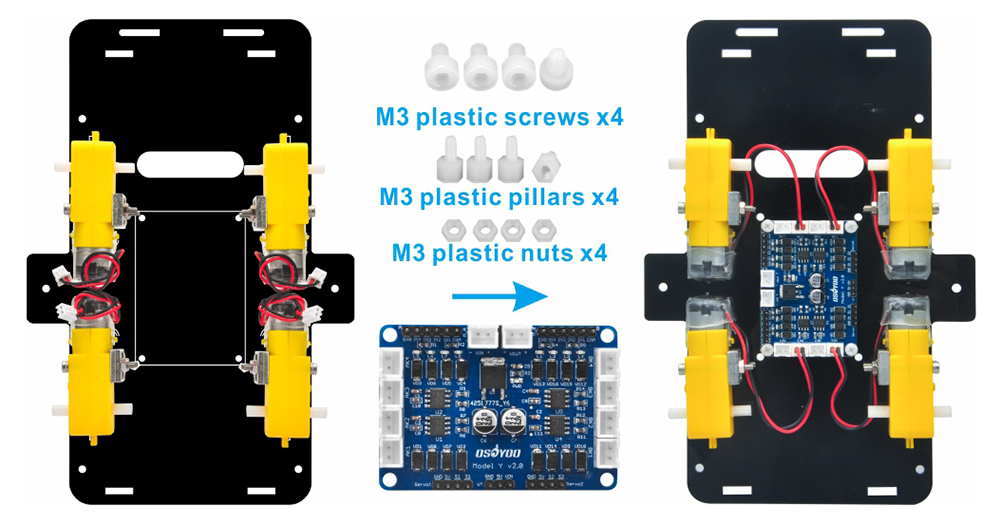
Si vous recevez la version mise à jour de la carte de pilote de moteur modèle Y V2.0, installez-la comme suit.
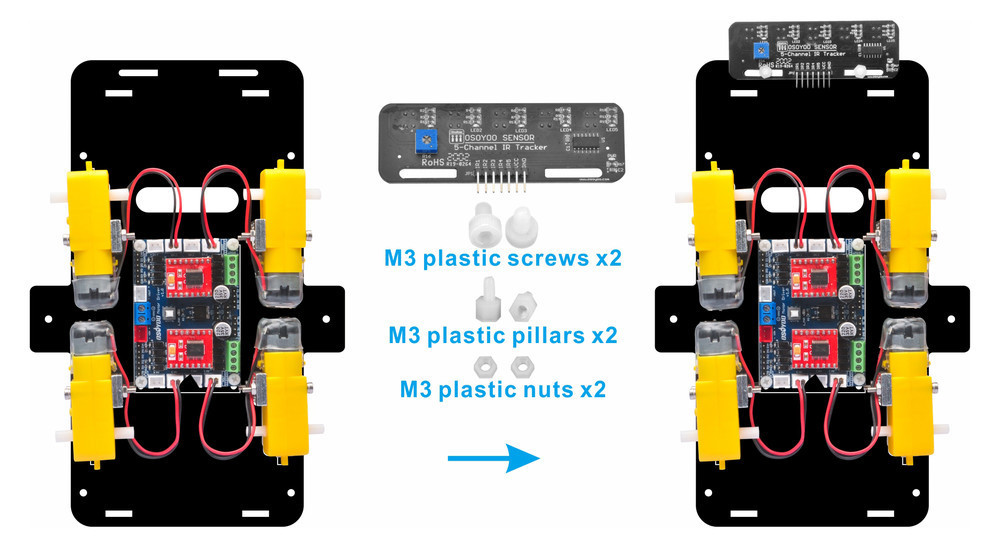
5) Installez les modules de capteur de suivi sur le châssis inférieur de la voiture avec 2 vis en plastique M3, des entretoises en plastique M3 et des écrous en plastique M3.
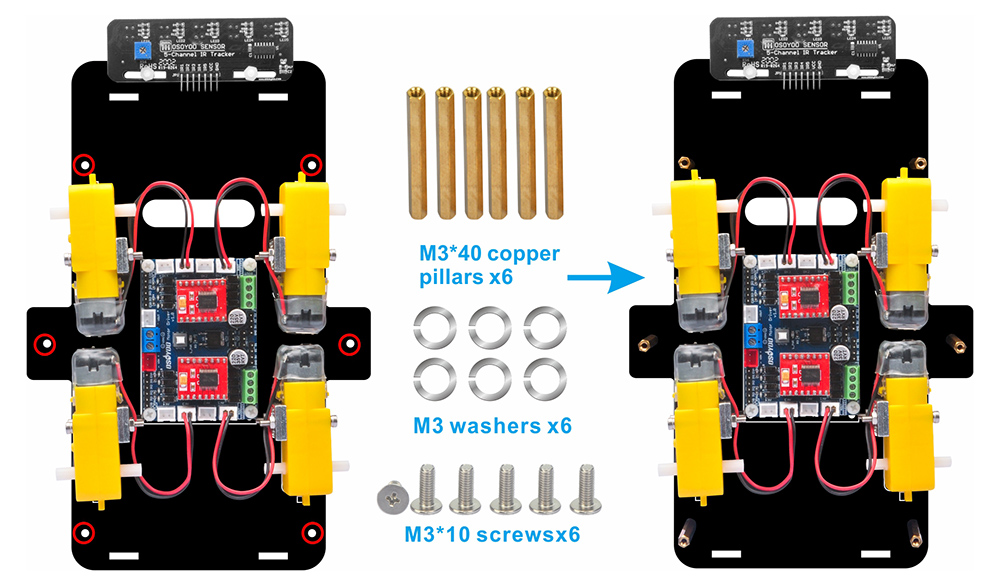
6) Fixez les colonnettes en cuivre avec 6 vis M3*10 et 6 rondelles sur le châssis inférieur.
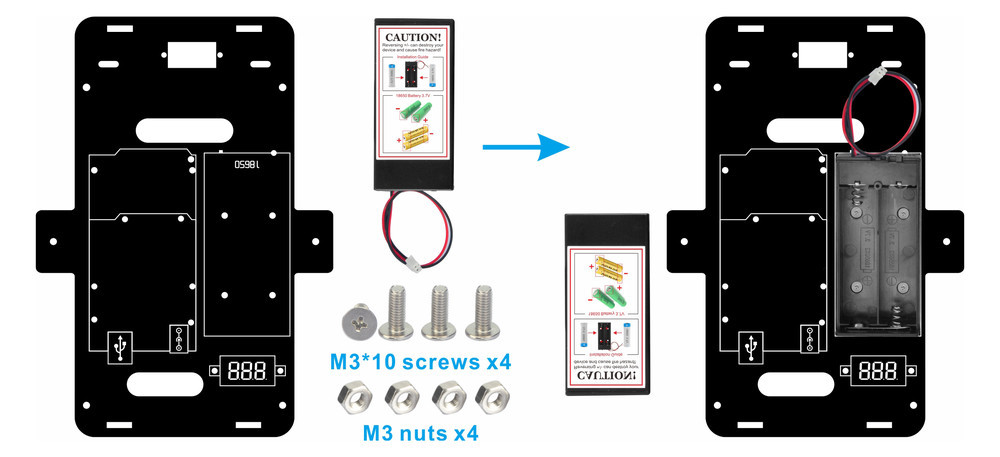
7)Fixez cette boîte de batterie sur le châssis supérieur avec 4 vis M3 x 10 et des écrous M3.
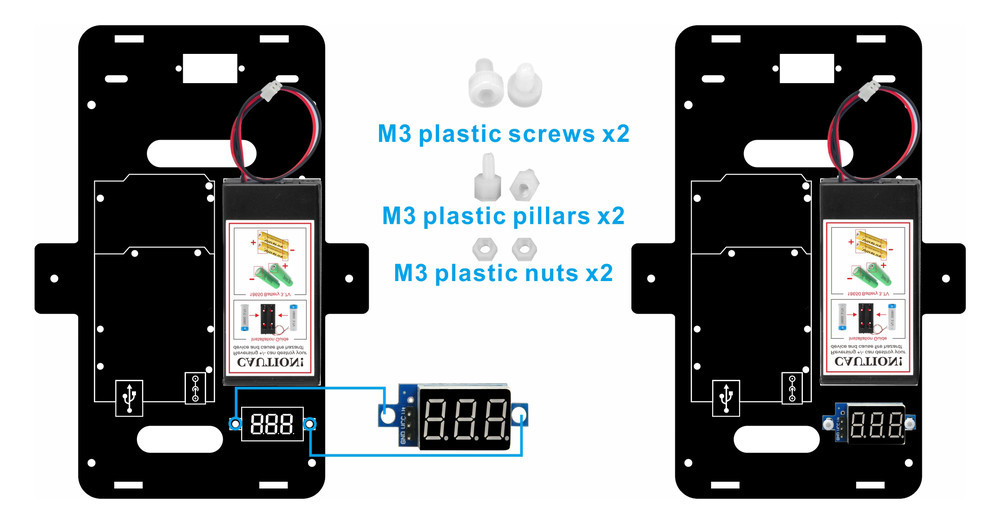
8)Installez le voltmètre sur le châssis de la voiture avec 2 vis en plastique M3, des entretoises en plastique et des écrous en plastique.
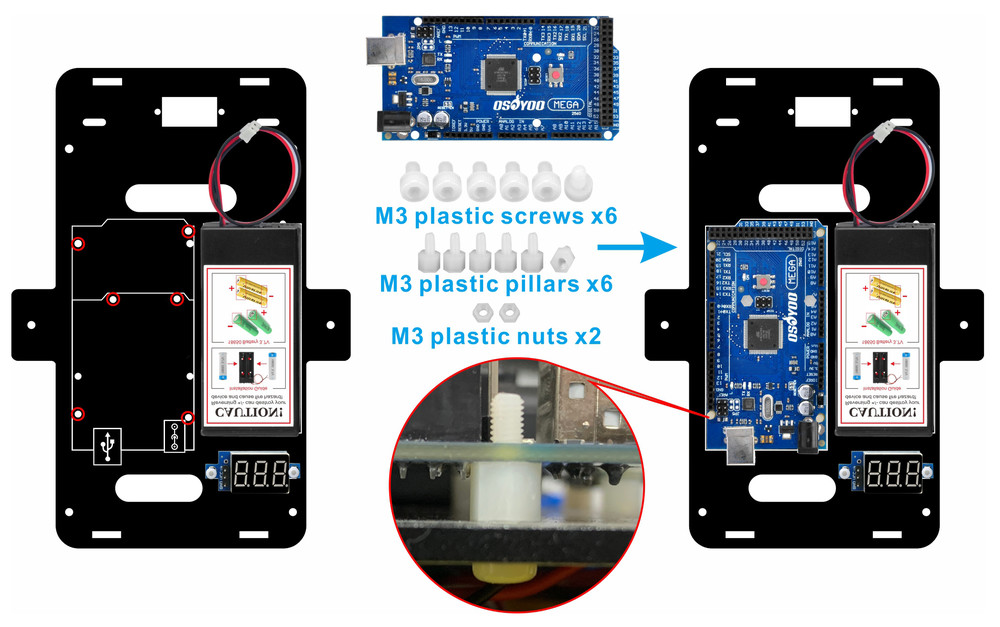
9) Fixez la carte OSOYOO Mega2560 sur le châssis supérieur de la voiture avec 6 vis en plastique M3, 6 entretoises en plastique et 2 écrous en plastique. (Veuillez installer la carte Mega2560 du côté avec l’impression.)
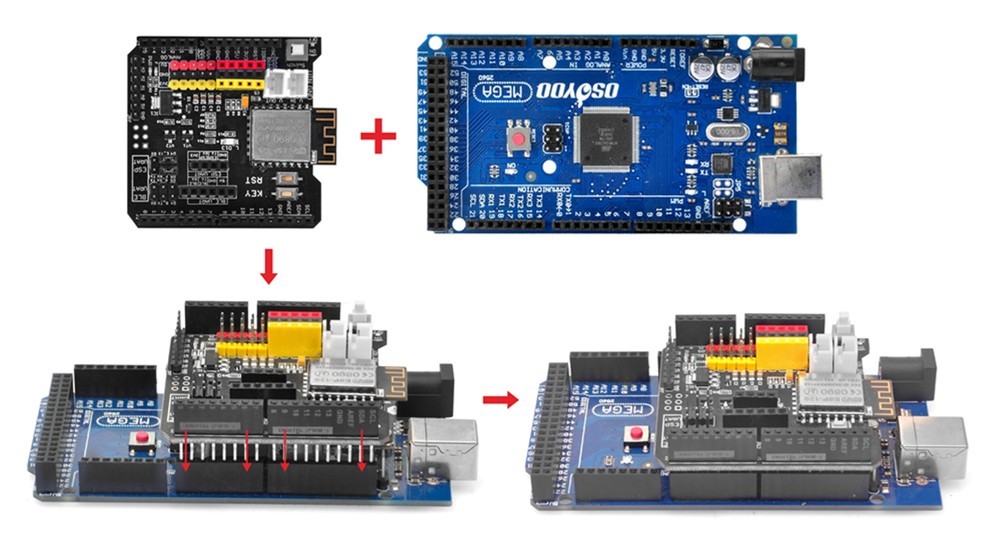
Insérez le module OSOYOO Uart WiFi sur votre carte Mega2560.
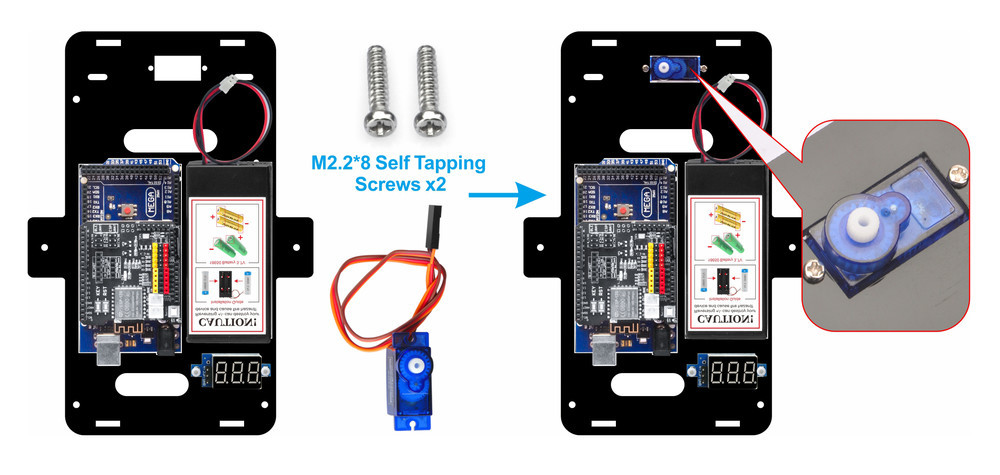
10)Installez le servo-moteur à l’avant du châssis supérieur de la voiture avec 2 vis auto-taraudeuses M2.2*8.
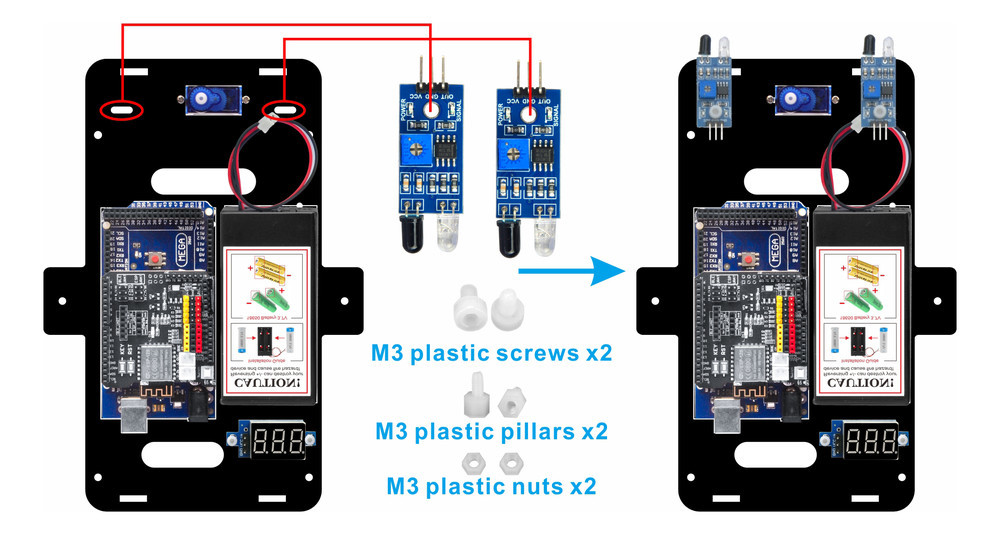
11)Installez 2 capteurs de distance infrarouge avec 2 vis en plastique M3, des entretoises en plastique M3 et des écrous en plastique M3 à l’avant du châssis supérieur de la voiture. Vous pouvez installer les vis en plastique M3 sous le châssis supérieur afin de serrer suffisamment les capteurs de distance infrarouge.
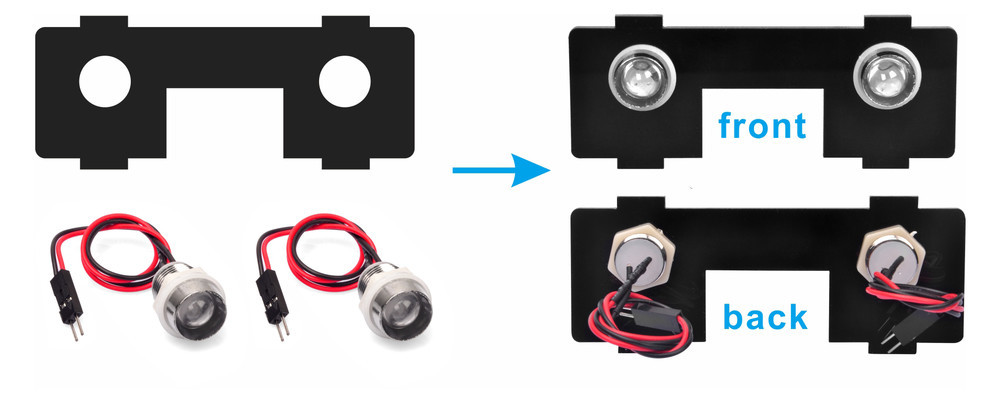
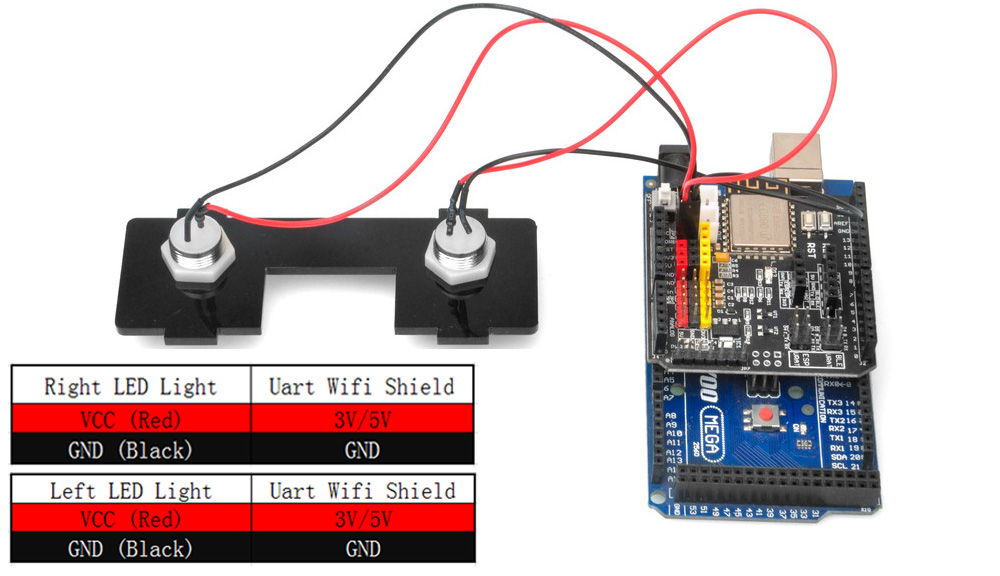
12)Installez 2 lumières LED sur la plaque de barrière avant comme suit.
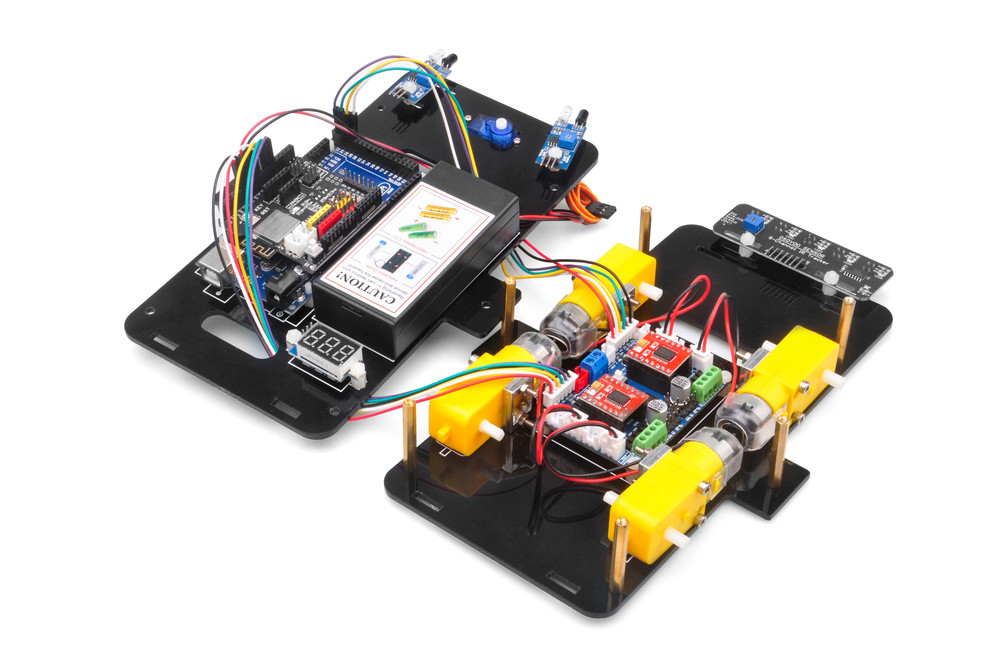
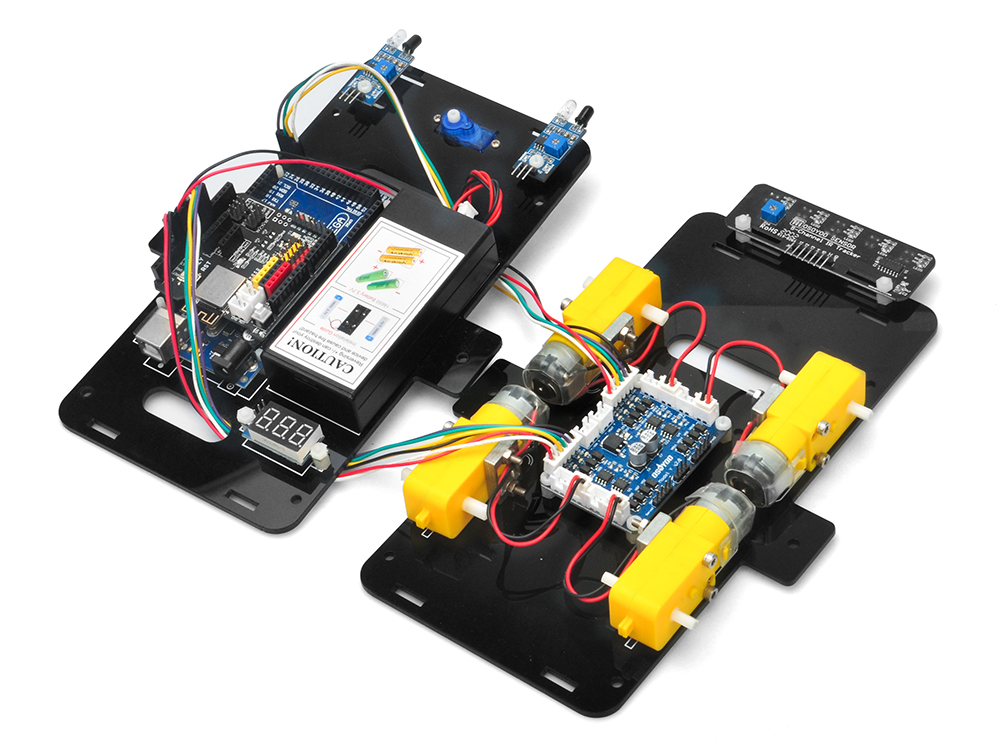
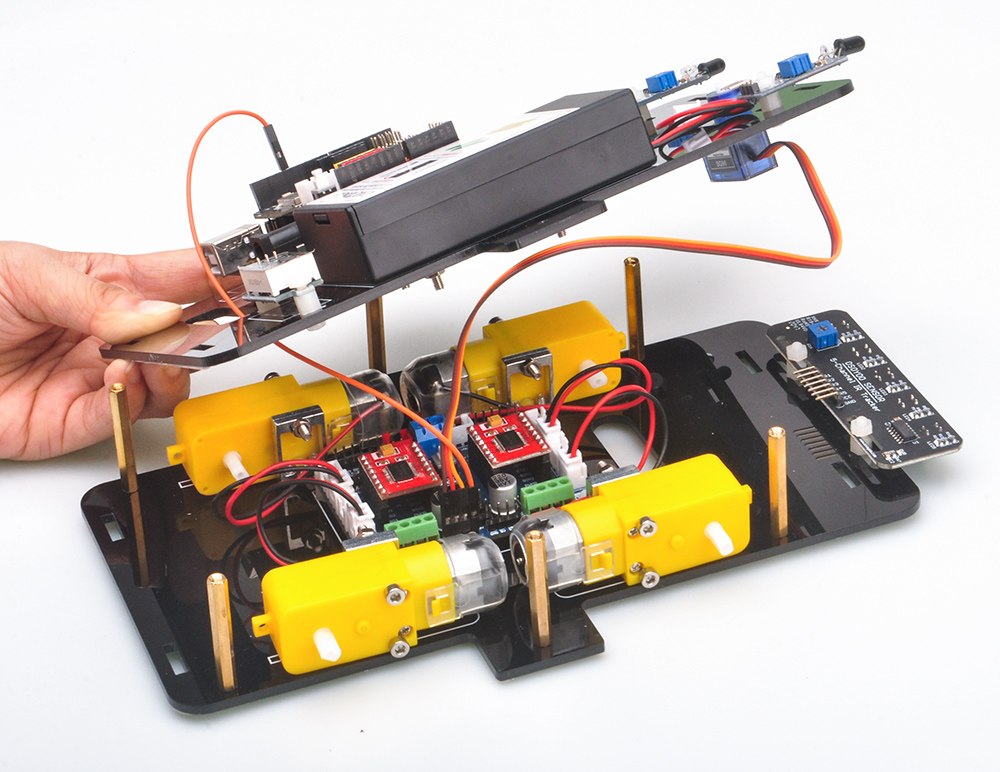
13)Avant de combiner le châssis supérieur et inférieur en un seul, il est nécessaire de réaliser le raccordement du circuit.
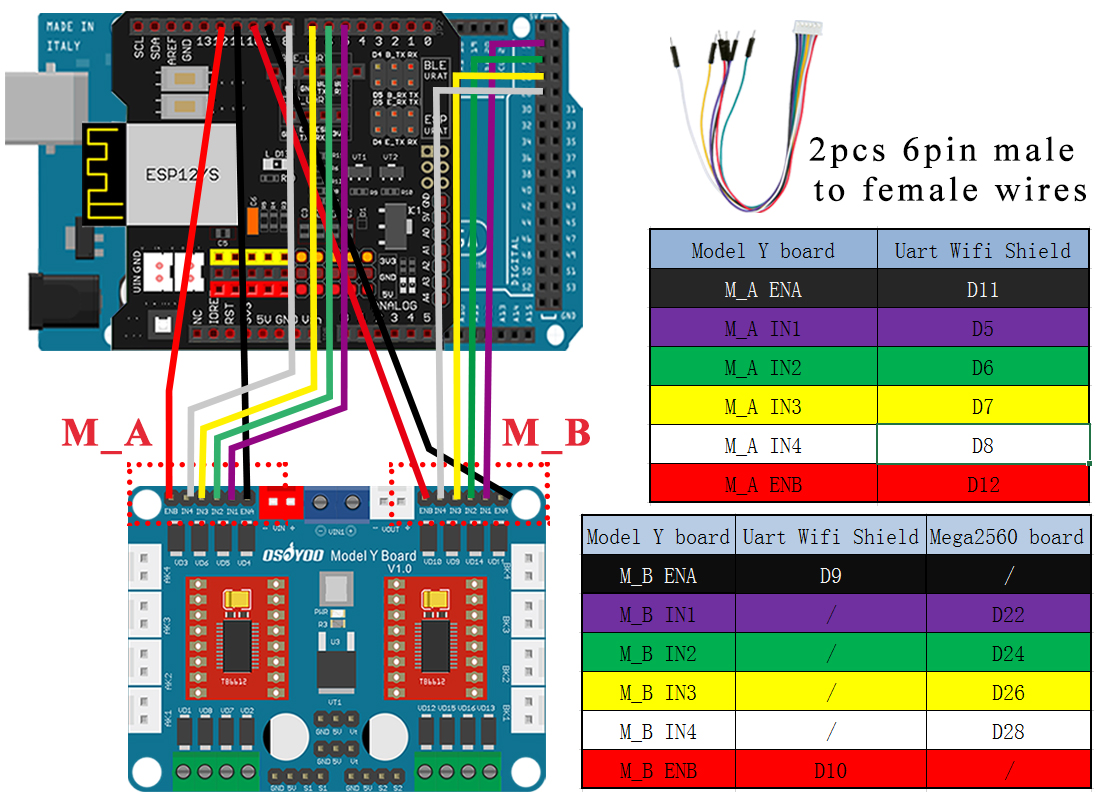
14)Connectez la carte modèle Y d’OSOYOO au module WiFi Uart d’OSOYOO avec 2 câbles d’extension mâle-femelle à 6 broches comme suit. Les fils à 6 broches de la zone B doivent passer par le trou près du servo SG90, les autres fils à 6 broches de la zone A doivent passer par le trou près du voltmètre.
Attention :
Lorsque vous insérez/retirez cette fiche à 6 broches dans la prise mâle à 6 broches du modèle Y, tenez la broche en plastique pour effectuer l’opération. Ne tirez jamais sur les fils pour retirer la fiche de la prise, sinon cela endommagera les fils.
Si vous recevez la version mise à jour de la carte de pilote de moteur modèle Y V2.0, installez-la comme suit.
15)
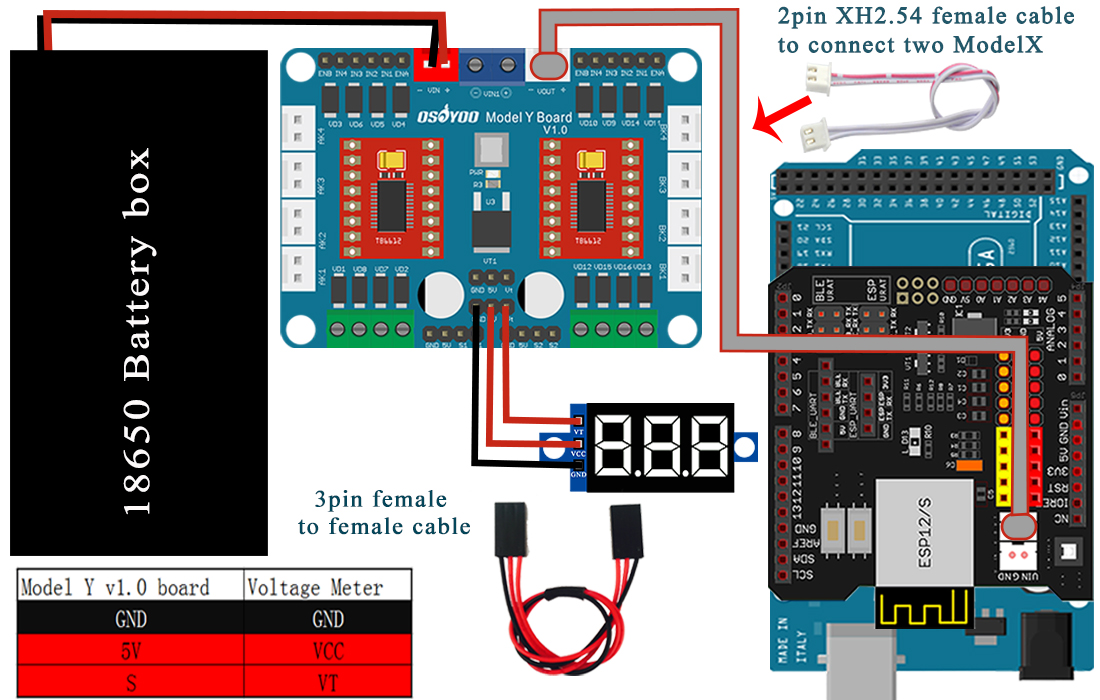
Connectez le voltmètre à la carte modèle Y d’OSOYOO avec un câble d’extension femelle-femelle à 3 broches selon le schéma de connexion ci-dessous.
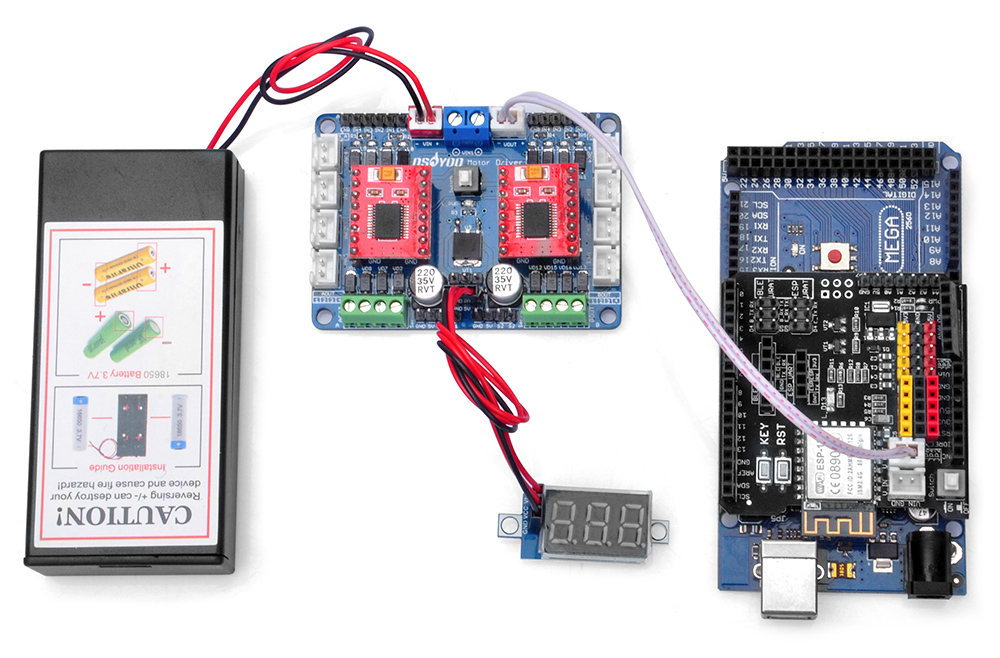
Connectez la prise 12V-GND de la carte modèle Y d’OSOYOO à la prise VIN-GND avec le câble PnP à 2 broches d’OSOYOO de 20 cm selon le schéma suivant.
Connectez la boîte de batterie à la prise VIN-GND du module WiFi Uart d’OSOYOO selon le schéma de connexion ci-dessous.
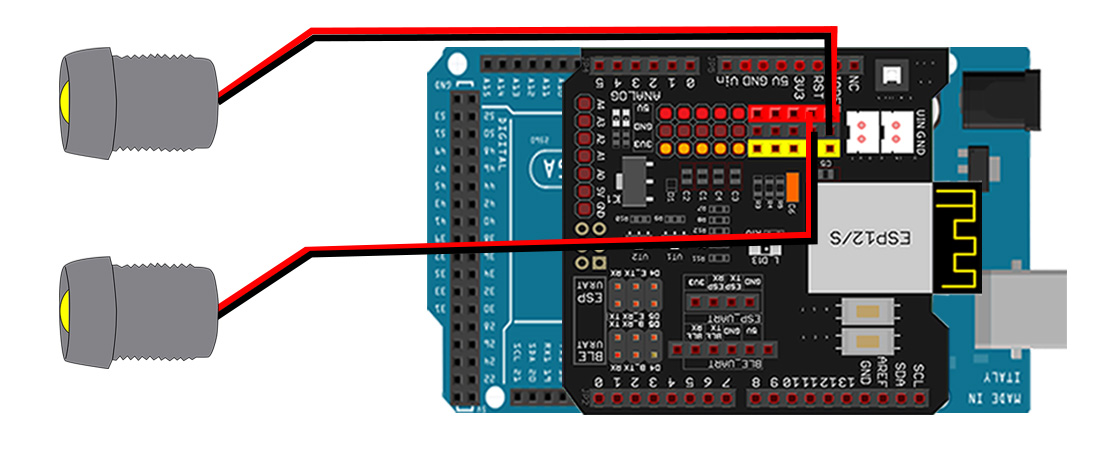
16)Installez 2 lumières LED sur la traverse avant du châssis comme suit.
Connectez la lumière LED au module WiFi Uart d’OSOYOO comme suit.
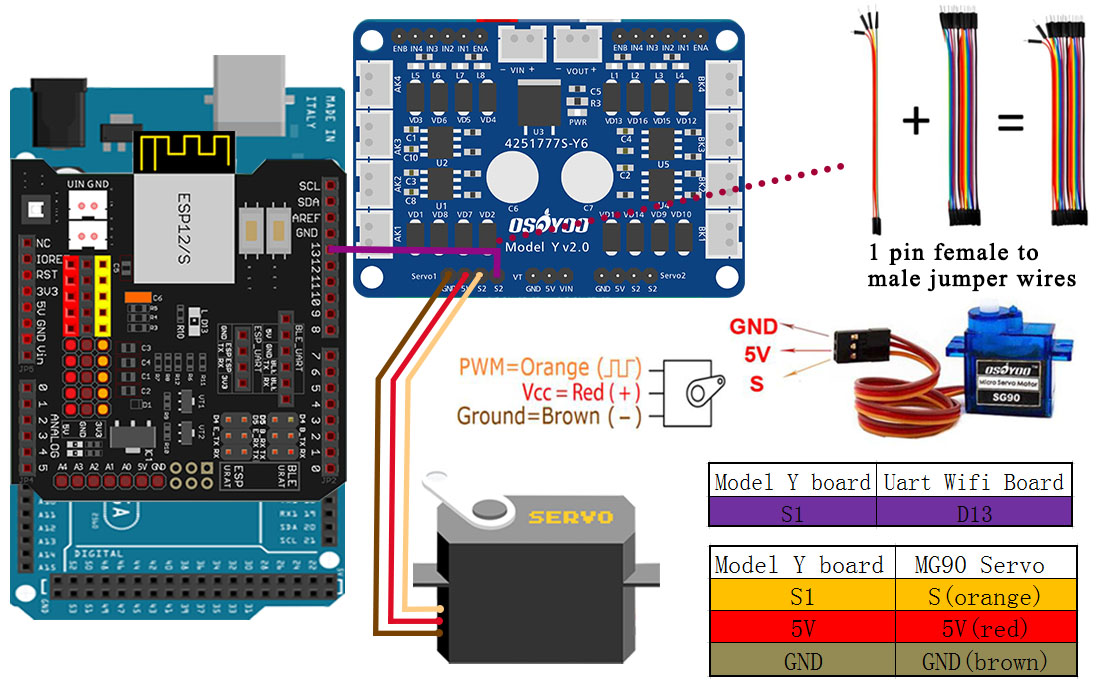
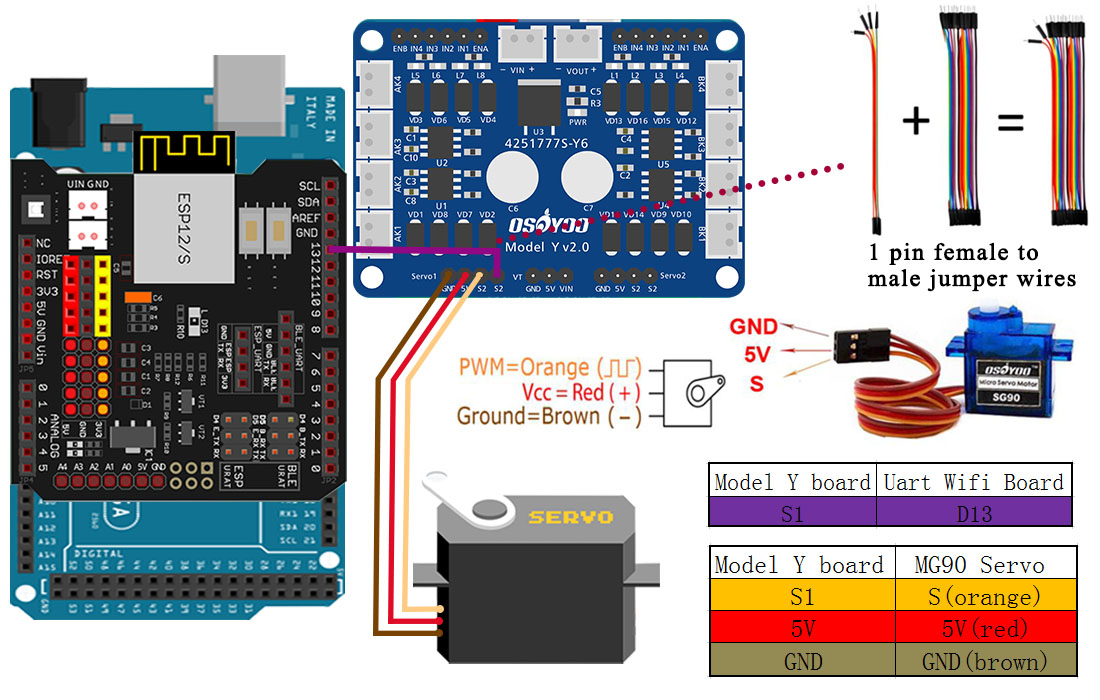
17)Connectez le servo-moteur SG90, la carte modèle Y d’OSOYOO et le module WiFi Uart d’OSOYOO selon le schéma suivant.
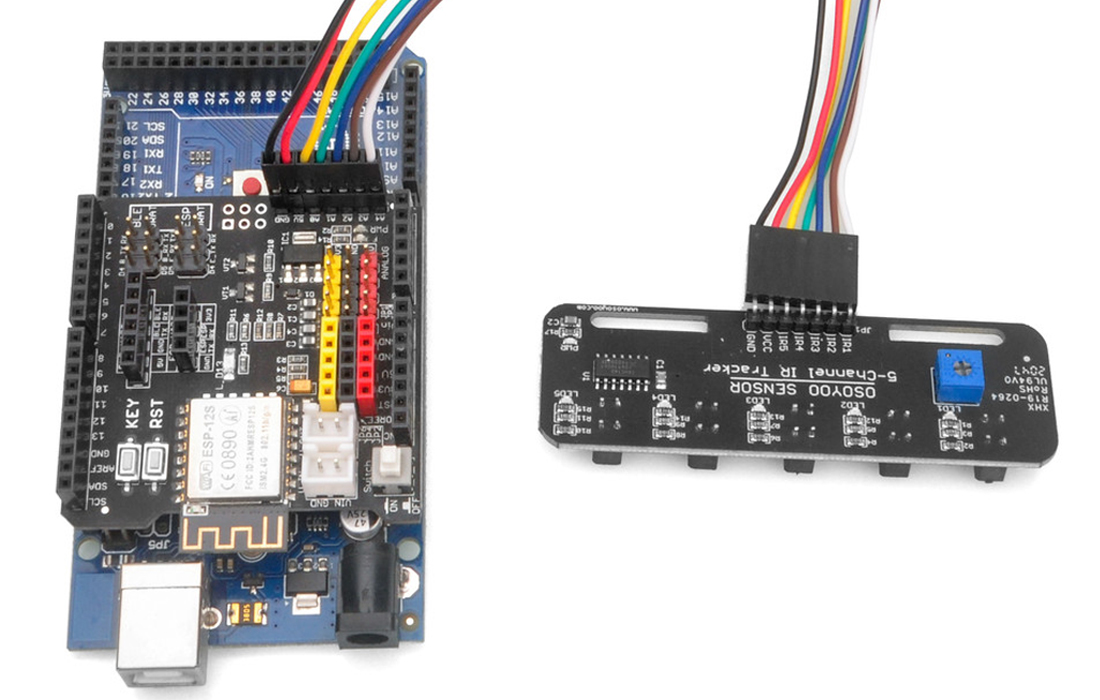
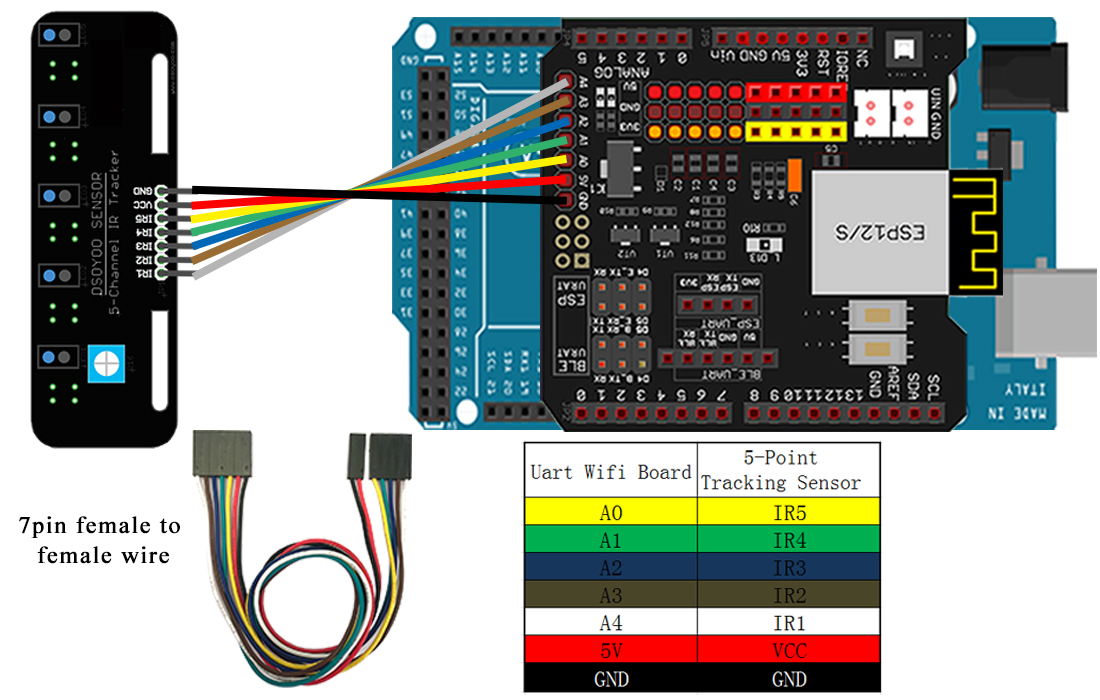
18)Connectez la broche GND-VCC du module de capteur de suivi à GND-5V de la carte WiFi Uart d’OSOYOO V1.3 ; connectez les broches IR1, IR2, IR3, IR4, IR5 à A4, A3, A2, A3, A1 avec un câble femelle-femelle à 7 broches de 25 cm comme le montre la photo suivante.
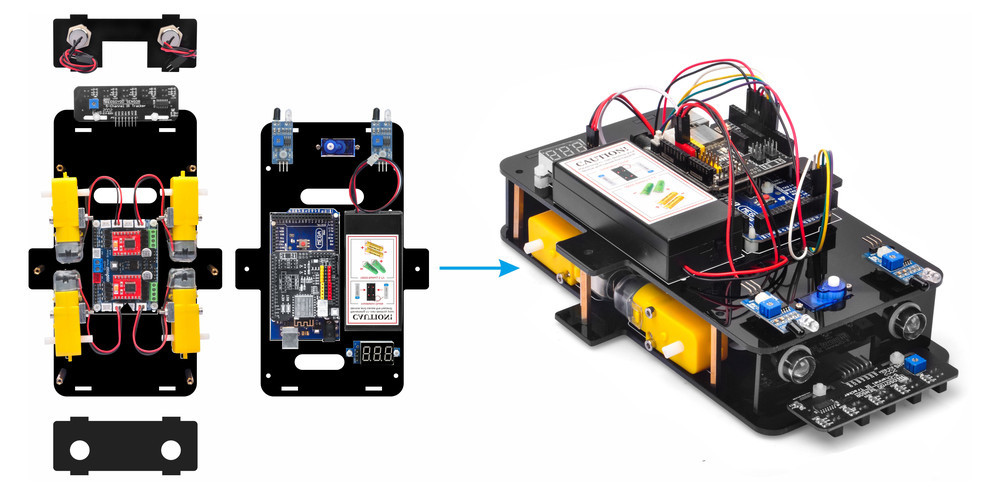
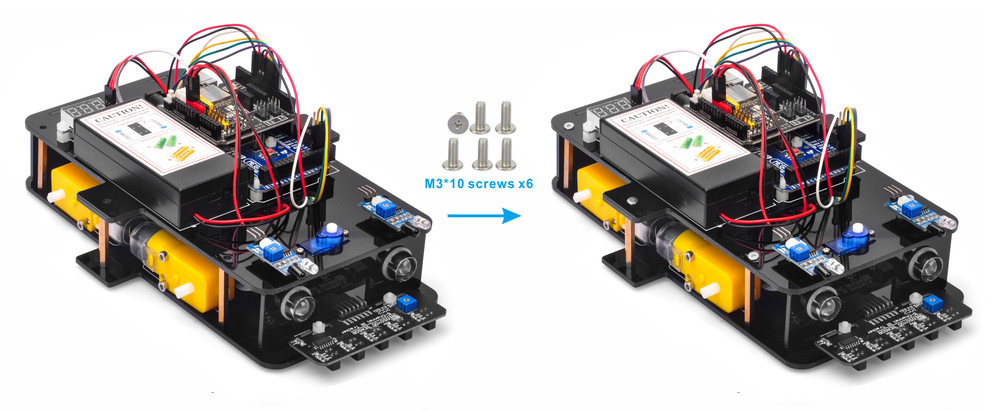
19)Fixez le châssis supérieur au châssis inférieur avec 6 vis hexagonales M3*10.
20)Installez les 4 roues sur les moteurs avec 4 vis M2.2×22 ou M2.5×20.
Note spéciale : Certains utilisateurs pourraient constater que la vis M2.2 peut être trop courte pour fixer la roue à la voiture. Si c’est votre cas, veuillez contacter le support OSOYOO ([email protected]) et demander gratuitement de nouvelles vis M2.5×20.
Remarque : Il y a deux types de roues et il faut les disposer de manière à ce que les rouleaux pointent vers le centre de la voiture lorsqu’on les regarde de dessus.
Maintenant, l’installation matérielle est presque terminée. Avant d’installer les batteries 18650 dans la boîte, nous devons d’abord télécharger le code d’exemple sur Arduino
Étape 1 : Installez la dernière version de l’IDE Arduino (si vous avez une version de l’IDE Arduino supérieure à 1.1.16, passez à l’étape suivante). Téléchargez l’IDE Arduino depuis le site https://www.arduino.cc/en/Main/Software?setlang=en ,puis installez le logiciel.
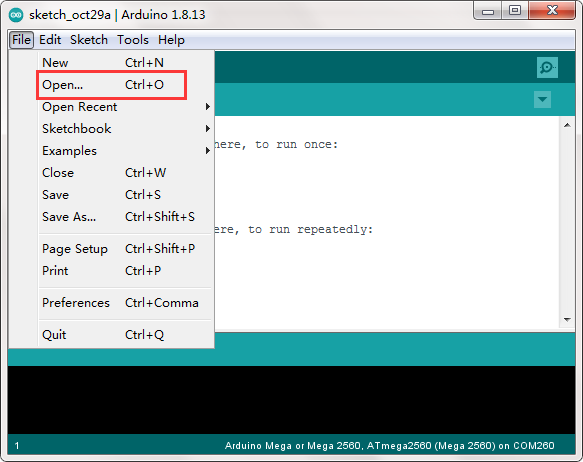
Étape 3 : Connectez la carte Mega2560 à l’ordinateur avec un câble USB. Ouvrez l’IDE Arduino -> cliquez sur Fichier -> cliquez sur Ouvrir -> choisissez le code “mc-lesson1.ino” dans le dossier lesson1, chargez le code dans Arduino.
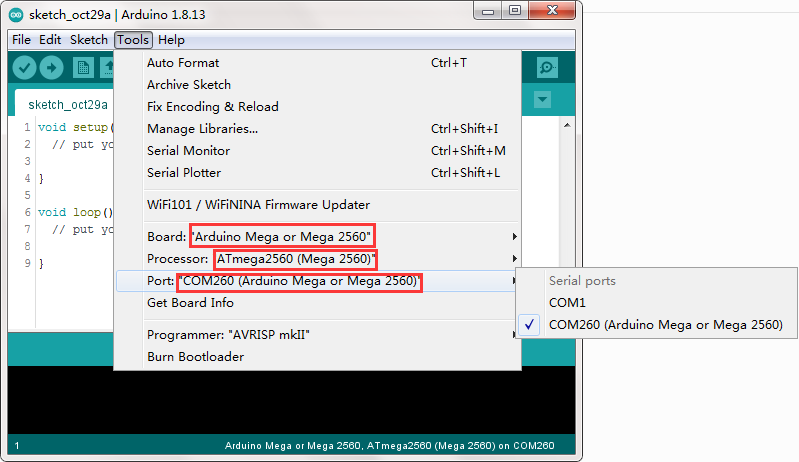
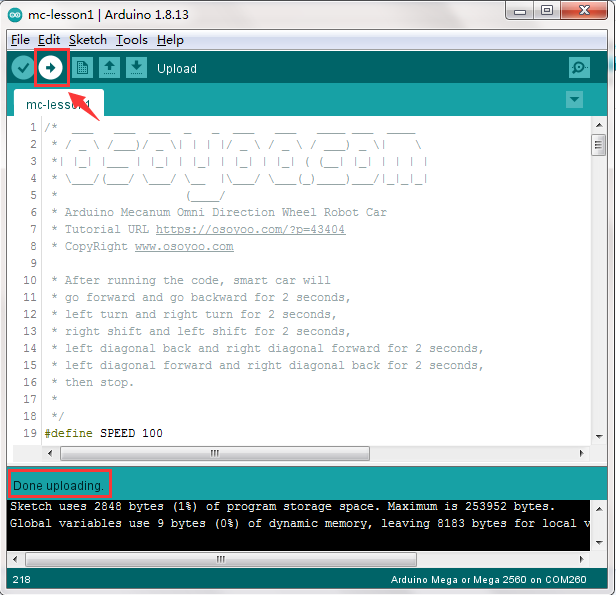
Étape 4 : Choisissez la carte/port correspondant à votre projet, téléversez le programme sur la carte.
Remarque : Si la voiture fonctionne lorsque le câble USB est connecté (c’est-à-dire que les roues tournent lorsque la voiture est soulevée), mais ne fonctionne pas lorsque le câble USB est déconnecté et que les batteries sont correctement insérées, vérifiez l’interrupteur de la carte double pilote Y – il a probablement été poussé vers le haut. Vous pouvez le pousser vers le bas avec un tournevis sans séparer le dessus et le dessous.
Déconnectez Arduino du PC, placez la batterie dans la boîte à piles. Lorsque vous placez la voiture sur le sol et allumez l’interrupteur sur le module WiFi Uart d’OSOYOO V1.3 et l’interrupteur sur la boîte à piles si vous avez installé une boîte à piles pour les batteries 18650.
La voiture devrait avancer → reculer → tourner à gauche → tourner à droite → Déplacement parallèle à droite → Déplacement parallèle à gauche → Diagonale bas-gauche → Diagonale haut-droite → Diagonale haut-gauche → Diagonale bas-droite, puis s’arrêter.













Thank You.