Das Mecanum Omni-Richtungsrad ist ein sehr interessantes Rad, das es dem Roboterauto ermöglicht, eine omni-direktionale Bewegung auszuführen (z. B. parallele Verschiebung nach links und rechts).
In diesem Projekt zeigen wir, wie man mit Arduino ein Mecanum-Rad-Roboterfahrzeug der Marke Osoyoo steuert, um einige grundlegende Bewegungen auszuführen, einschließlich Vorwärtsfahren, Rückwärtsfahren, Linksabbiegen, Rechtsabbiegen, paralleles Linksverschieben, paralleles Rechtsverschieben usw.
Diese Lektion zeigt Ihnen auch, wie Sie das Chassis dieses Autos installieren und die Arduino-Steuerungssignalkabel mit dem Modell Y-Board verbinden. Diese Installation wird der Ausgangspunkt für unsere anderen Lektionen sein.
Laden Sie PDF-Tutorials herunter:https://osoyoo.com/manual/2021006600.pdf
OSOYOO Mecanum-Rad-Roboterfahrzeug-Chassis x1
OSOYOO Räder und Motoren x4 (linke Räder x2/rechte Räder x2)
OSOYOO Mega2560 Board, vollständig kompatibel mit Arduino UNO/Mega2560 x1
OSOYOO Uart WIFI Shield x1
OSOYOO Model Y Motor Driver Board (es ist mit zwei TB6612 H-Brückentreibern integriert, die 4 separate Kanäle und 8 PWM-Ausgangsanschlüsse steuern können)
OSOYOO Spannungsmesser x1
OSOYOO Batteriegehäuse x1
OSOYOO 6-poliges Steckbrücken-Kabel (männlich zu weiblich) x2
OSOYOO 3-poliges Steckbrücken-Kabel (weiblich zu weiblich) x1
OSOYOO 2-poliger Stecker-Stecker-Adapter (weiblich zu weiblich) x1
18650-Batterien (3,7 V) x2 Batterieladegerät x1
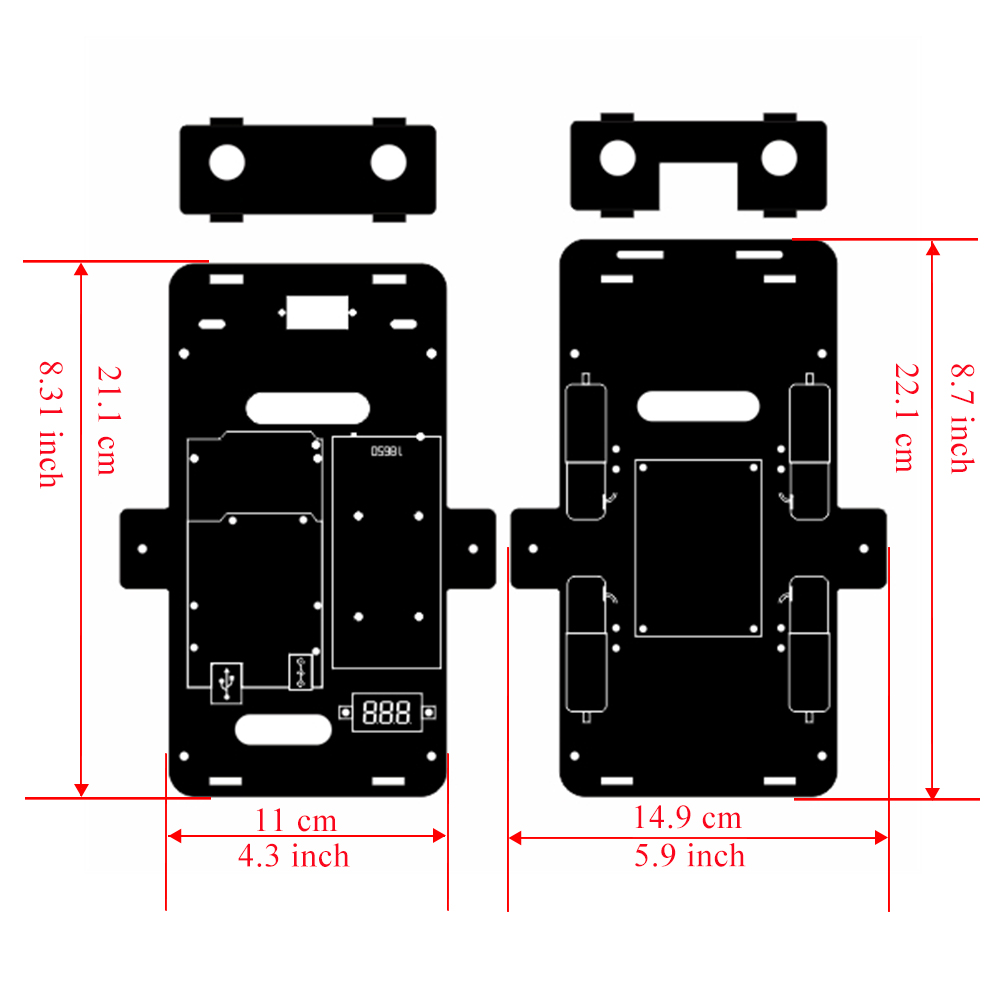
Abmessungen
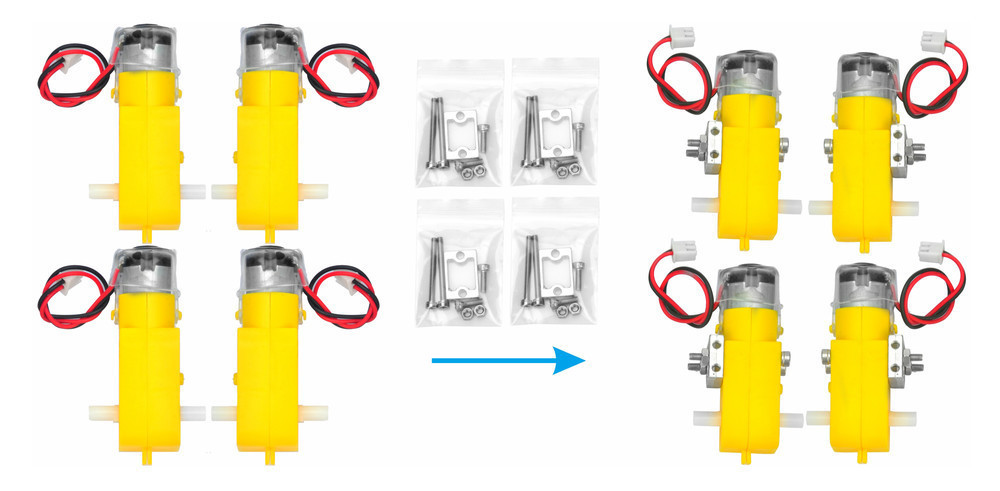
1)Befestigen Sie 4 Motoren mit Metallmotorhaltern wie folgt. (Bitte überprüfen Sie die Motordrehrichtung, bevor Sie die Metallmotorhalterungen installieren.)
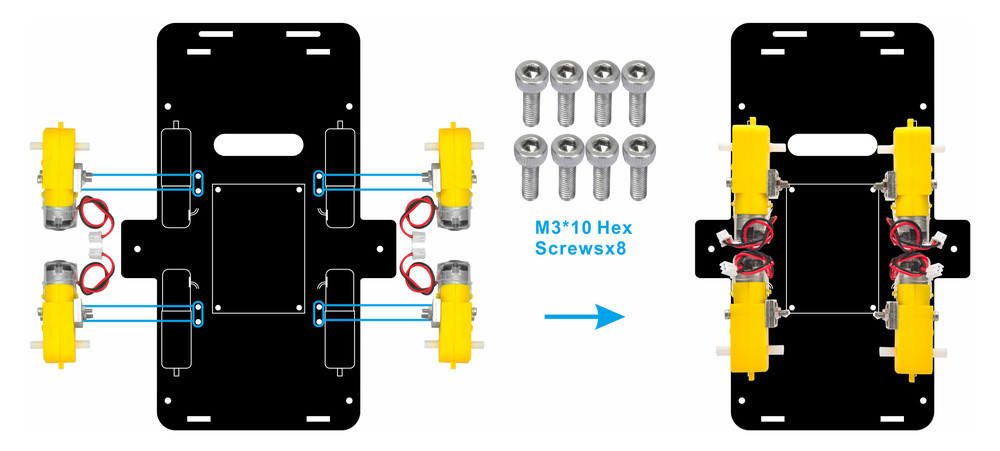
2)Befestigen Sie 4 Motoren am unteren Fahrzeugchassis mit M3*10 Sechskantschrauben mit einem Sechskantschraubendreher. (Die Schrauben für diesen Schritt befinden sich in der Verpackung des Metallmotorhalters.)
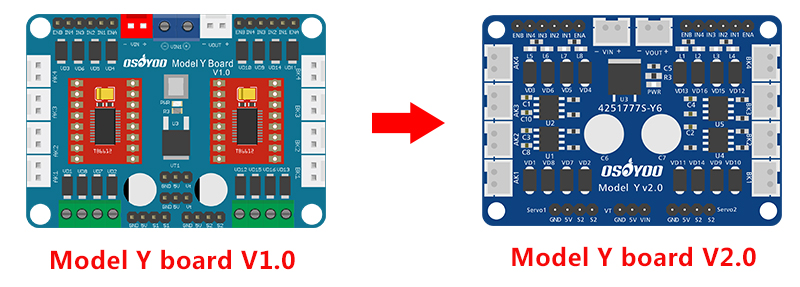
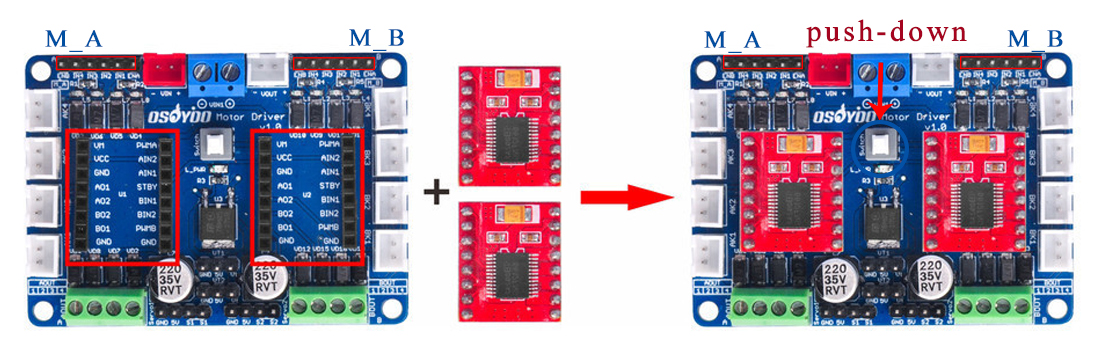
3)Stecken Sie das TB6612-Modul auf das OSOYOO Model Y Driver Board.
Wenn Sie das aktualisierte Model Y Driver Board V2.0 erhalten haben, wie unten dargestellt, überspringen Sie bitte Schritt 3).
Hinweis: Die weiße Taste hat zwei Zustände, NIEDERGEDRÜCKT und HERAUSGEDRÜCKT. Stellen Sie sicher, dass sich die Taste in der NIEDERGEDRÜCKT-Position befindet.
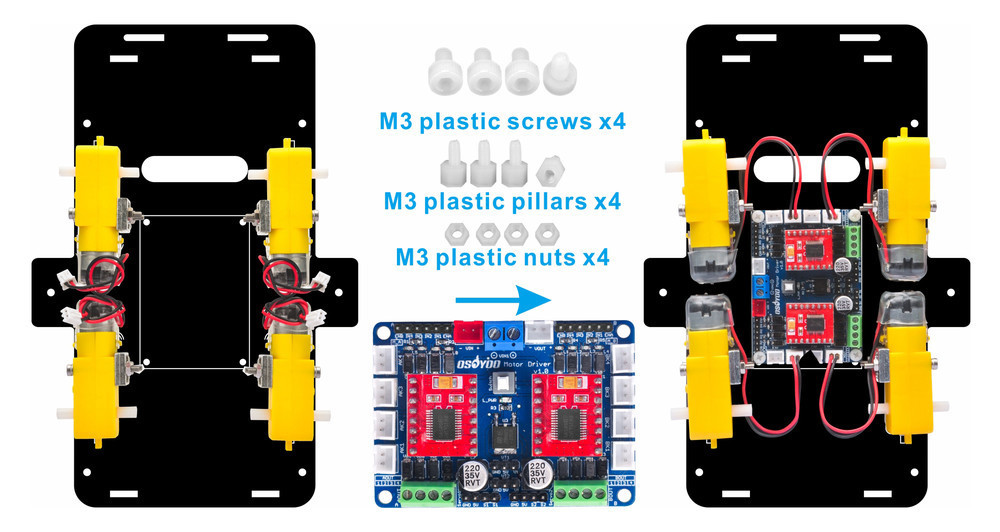
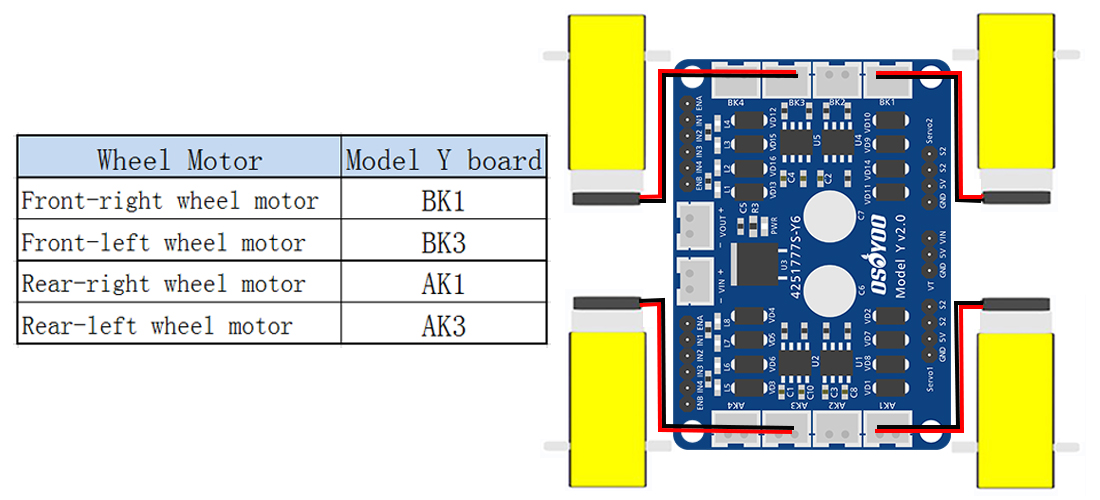
4) Installieren Sie das OSOYOO Model Y Driver Board mit 4 Stück M3-Kunststoffschrauben, Kunststoffstützen und Kunststoffmuttern am unteren Fahrzeugchassis. Verbinden Sie anschließend die 4 Motoren gemäß der folgenden Abbildung mit den Buchsen K1 und K3 des Model Y Motor Boards. (Vergewissern Sie sich bitte, dass Sie das OSOYOO MODEL Y Driver Board in der richtigen Ausrichtung installieren.)
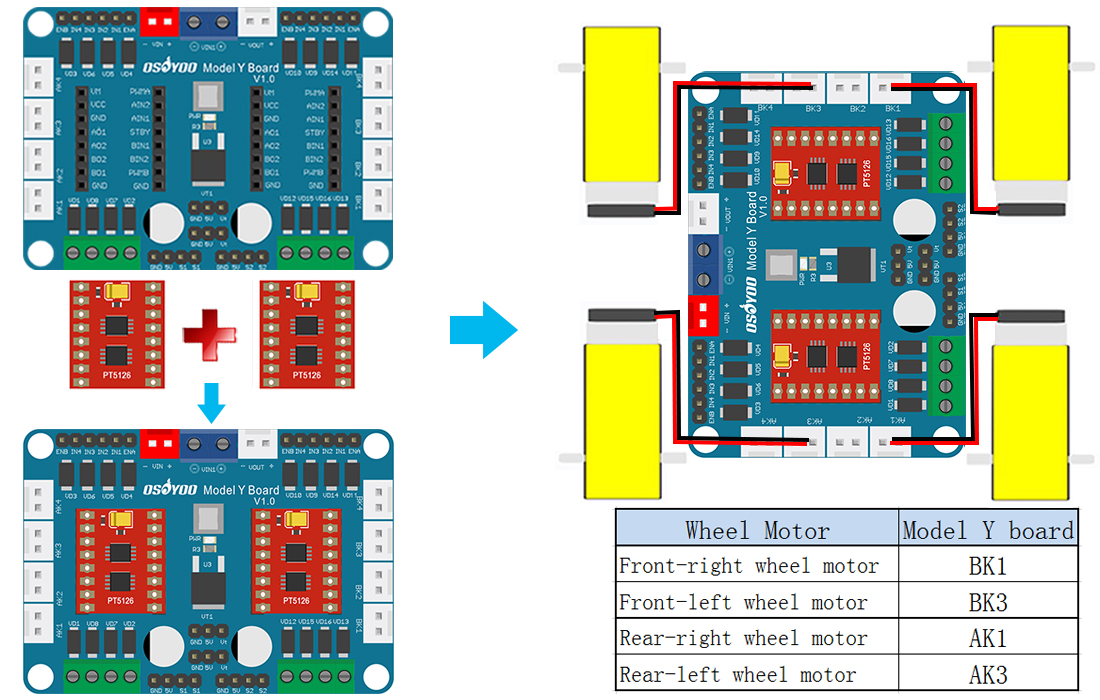
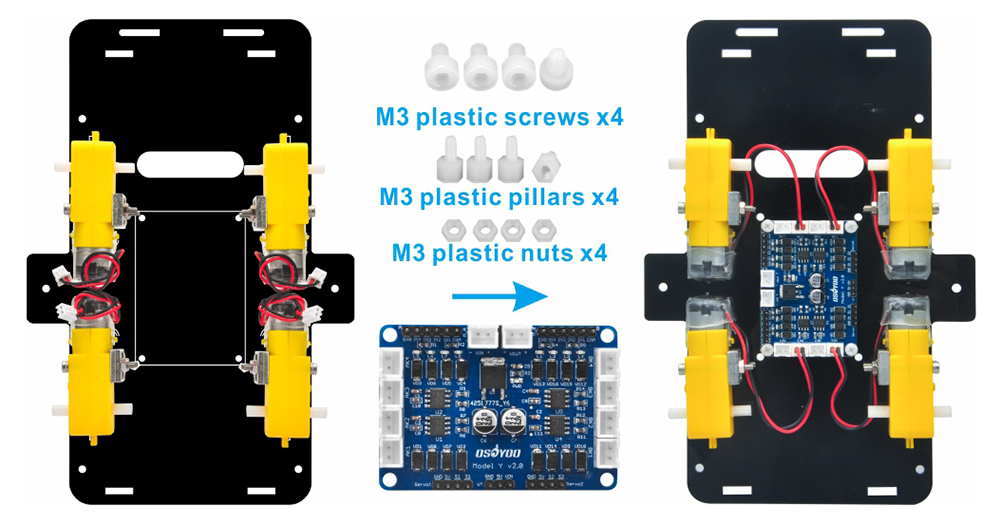
Wenn Sie das aktualisierte Model Y Driver Board V2.0 erhalten haben, installieren Sie es bitte wie folgt.
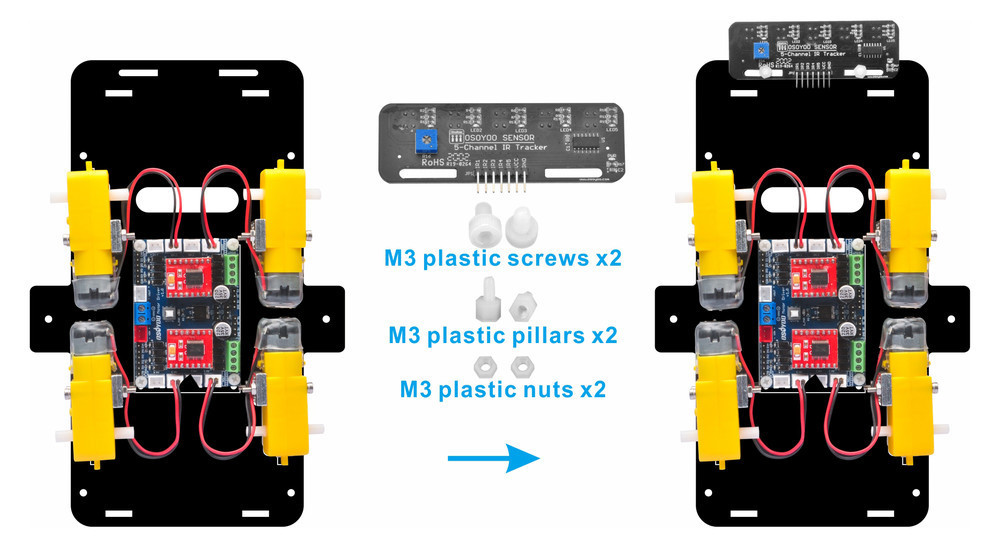
5) Installieren Sie die Tracking-Sensor-Module mit 2 Stück M3-Kunststoffschrauben, M3-Kunststoffstützen und M3-Kunststoffmuttern am unteren Fahrzeugchassis.
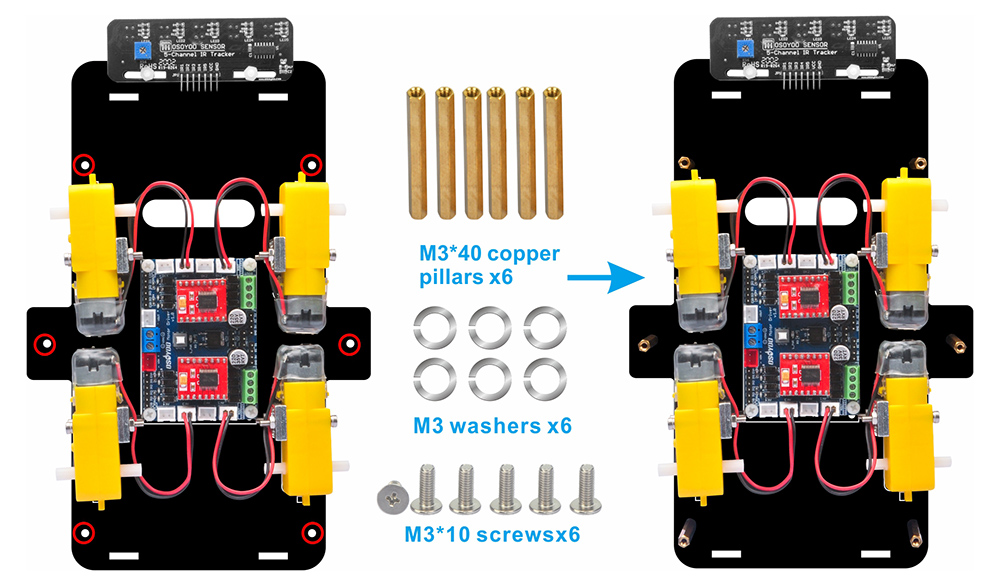
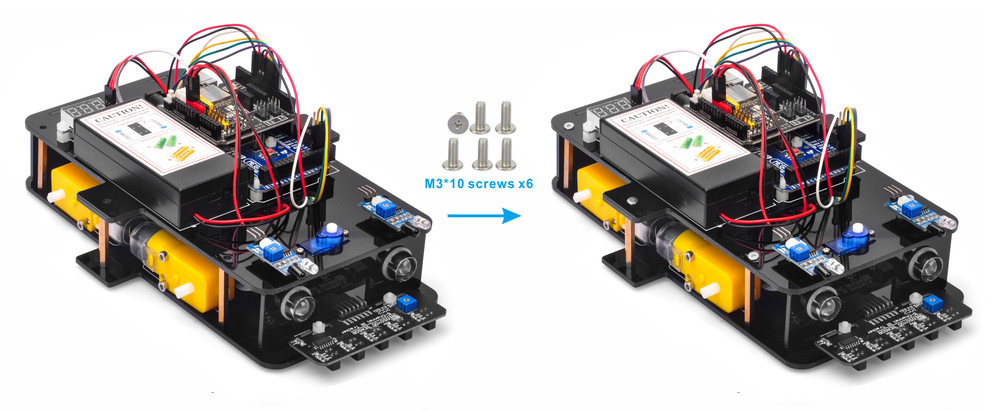
6) Befestigen Sie die Kupfersäulen mit 6 Stück M3*10 Schrauben und 6 Stück Unterlegscheiben am unteren Chassis..
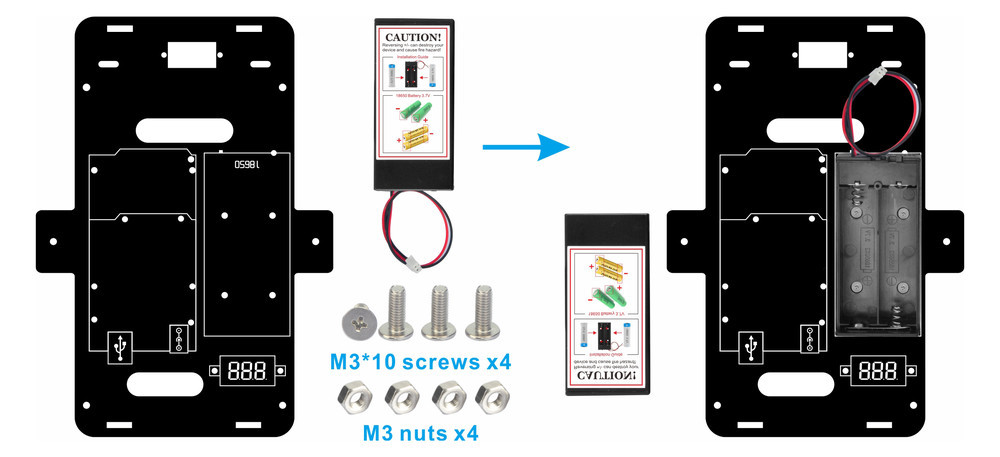
7)Befestigen Sie diese Batteriebox mit 4 Stück M3 x 10 Schrauben und M3 Muttern am oberen Chassis.
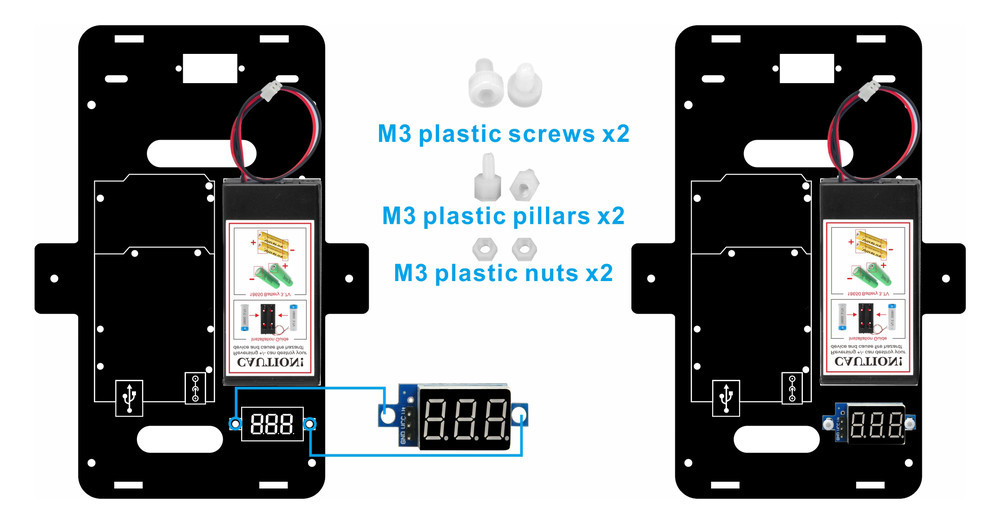
8)Installieren Sie das Spannungsmessgerät mit 2 Stück M3-Kunststoffschrauben, Kunststoffstützen und Kunststoffmuttern am unteren Fahrzeugchassis.
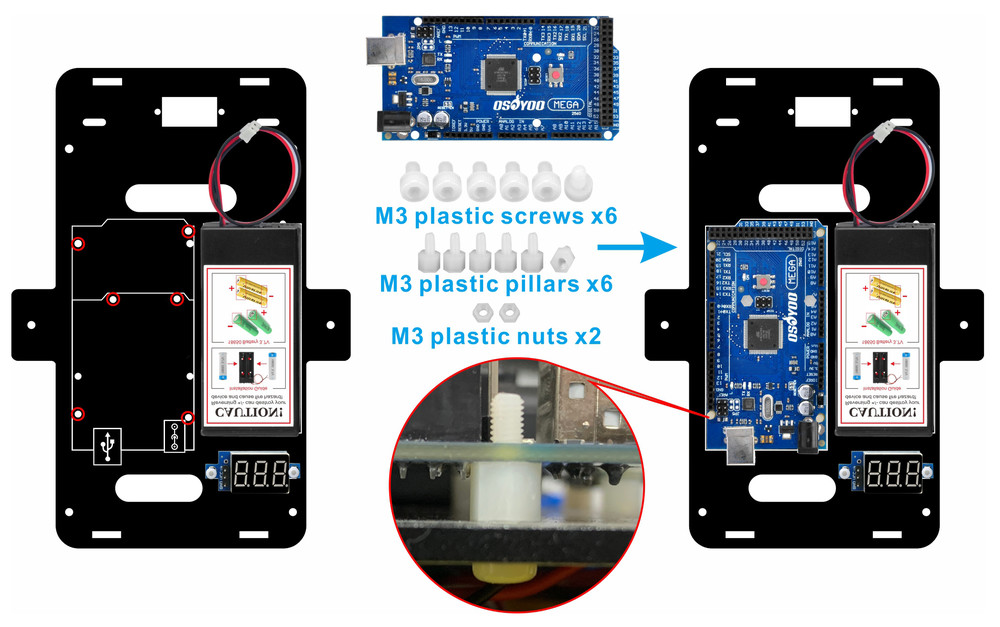
9) Befestigen Sie das OSOYOO Mega2560 Board mit 6 Stück M3-Kunststoffschrauben, 6 Stück Kunststoffstützen und 2 Stück Kunststoffmuttern am oberen Fahrzeugchassis. (Bitte installieren Sie das Mega2560 Board auf der Seite mit dem Aufdruck.)
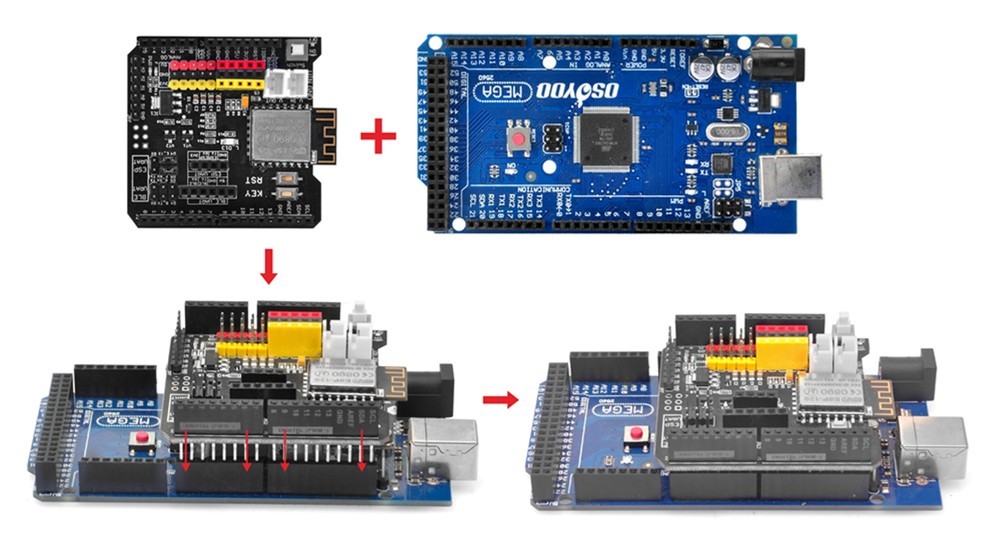
Stecken Sie das OSOYOO Uart WiFi Shield auf Ihr Mega2560 Board.
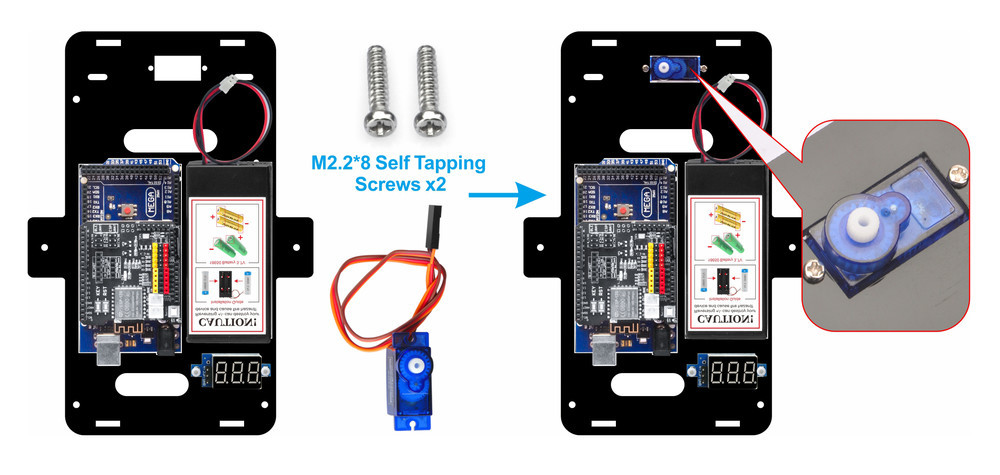
10)Installieren Sie den Servomotor an der Vorderseite des oberen Fahrzeugchassis mit 2 Stück M2.2*8 Selbstschneidenden Schrauben.
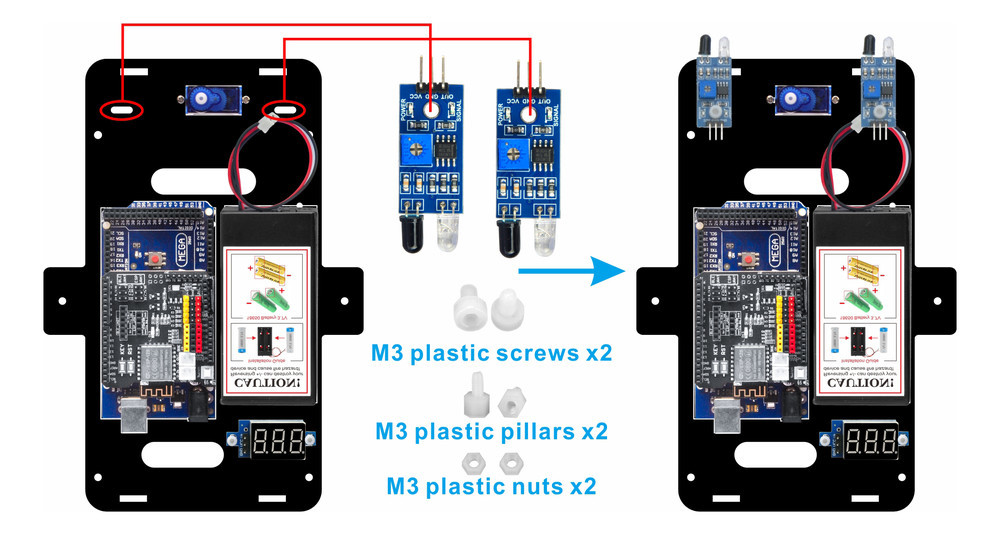
11) Installieren Sie 2 Stück IR-Abstandssensoren mit 2 Stück M3-Kunststoffschrauben, M3-Kunststoffstützen und M3-Kunststoffmuttern an der Vorderseite des oberen Fahrzeugchassis. Sie können M3-Kunststoffschrauben unter dem oberen Chassis installieren, um die IR-Abstandssensoren ausreichend festzuziehen.
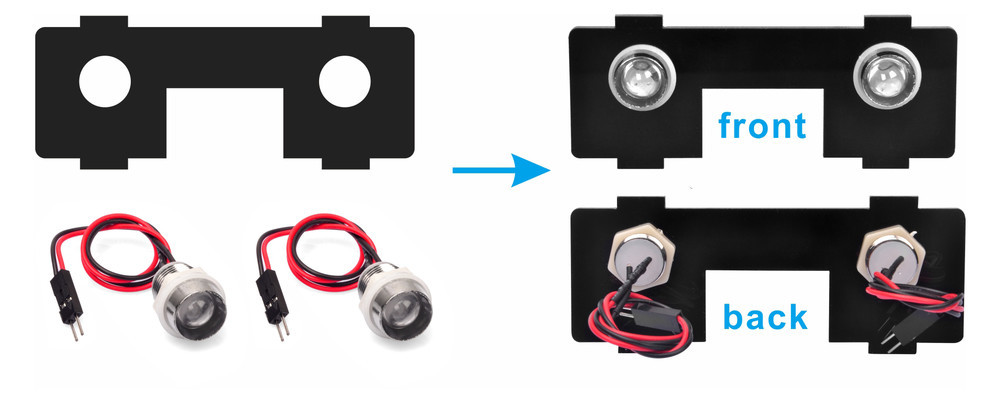
12) Installieren Sie 2 Stück LED-Lichter gemäß den folgenden Anweisungen auf der vorderen Schutzplatte.
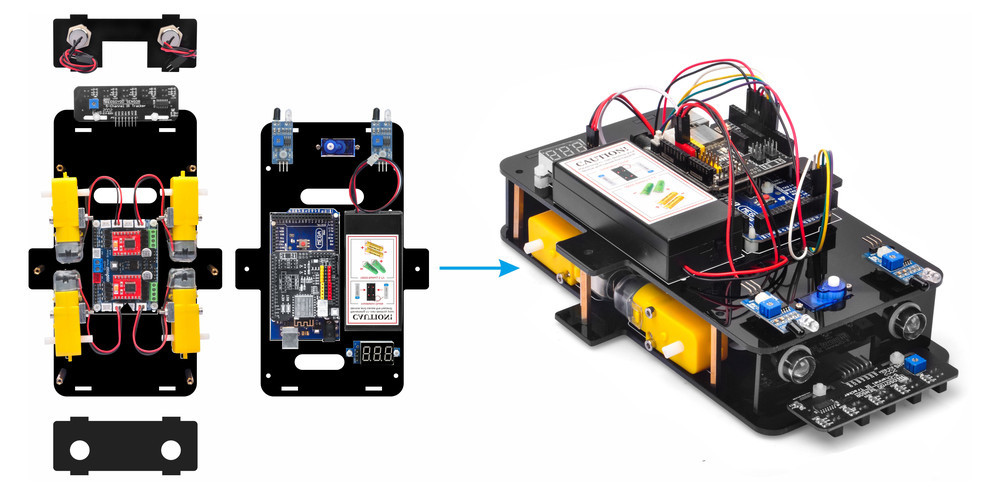
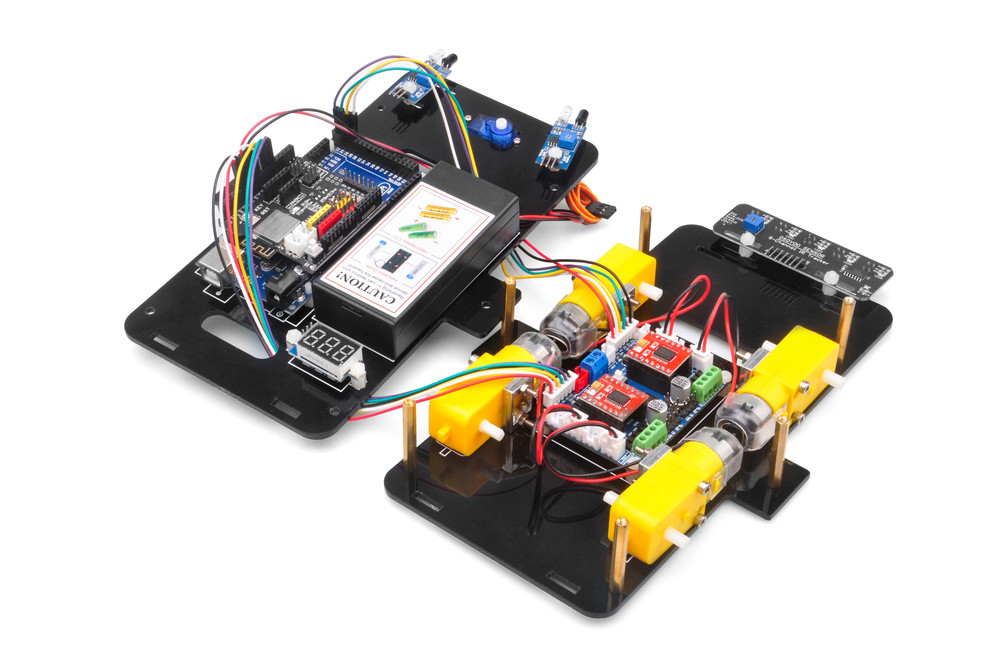
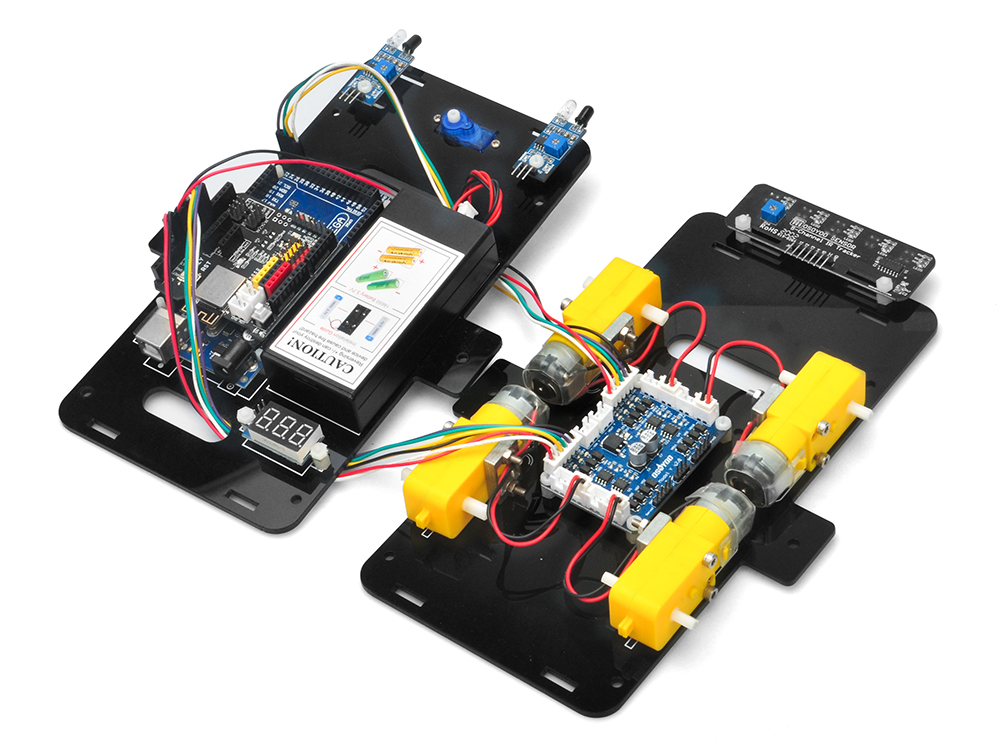
13) Bevor das obere und untere Chassis zu einer Einheit verbunden werden, muss die Schaltung verbunden werden.
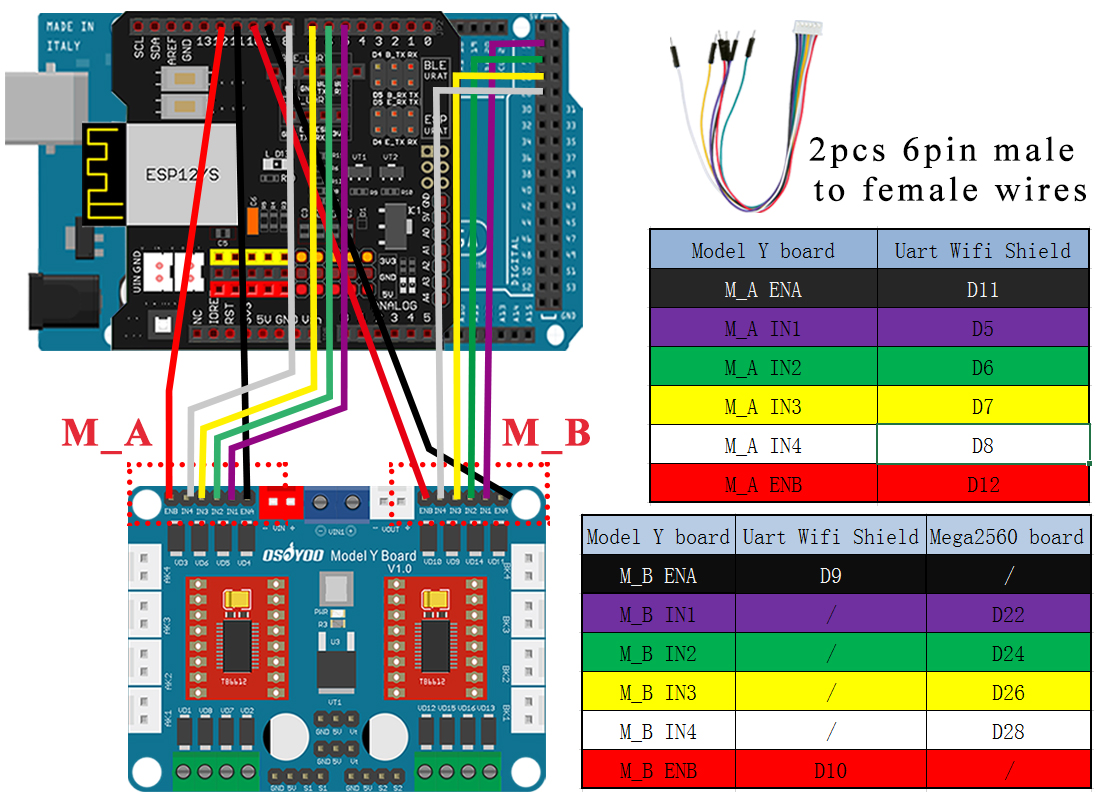
14)Verbinden Sie das OSOYOO Model Y Board mit dem OSOYOO Uart WiFi Shield mit 2 Stück 6-poligen Steckbrücken-Kabeln (männlich zu weiblich) wie folgt. Die 6-poligen Kabel in Bereich B müssen durch das Loch in der Nähe des SG90-Servos geführt werden, die anderen 6-poligen Kabel in Bereich A müssen durch das Loch in der Nähe des Spannungsmessgeräts geführt werden.
Achtung: Wenn Sie diesen 6-poligen Stecker in die männliche 6-polige Buchse des Model Y einstecken/entfernen, halten Sie bitte den Kunststoff-Stift-Halter, um die Operation durchzuführen. Ziehen Sie niemals an den Kabeln, um den Stecker aus der Buchse zu ziehen, da dies die Kabel beschädigen kann.
Wenn Sie das aktualisierte Model Y Driver Board V2.0 erhalten haben, installieren Sie es bitte wie folgt..
15)
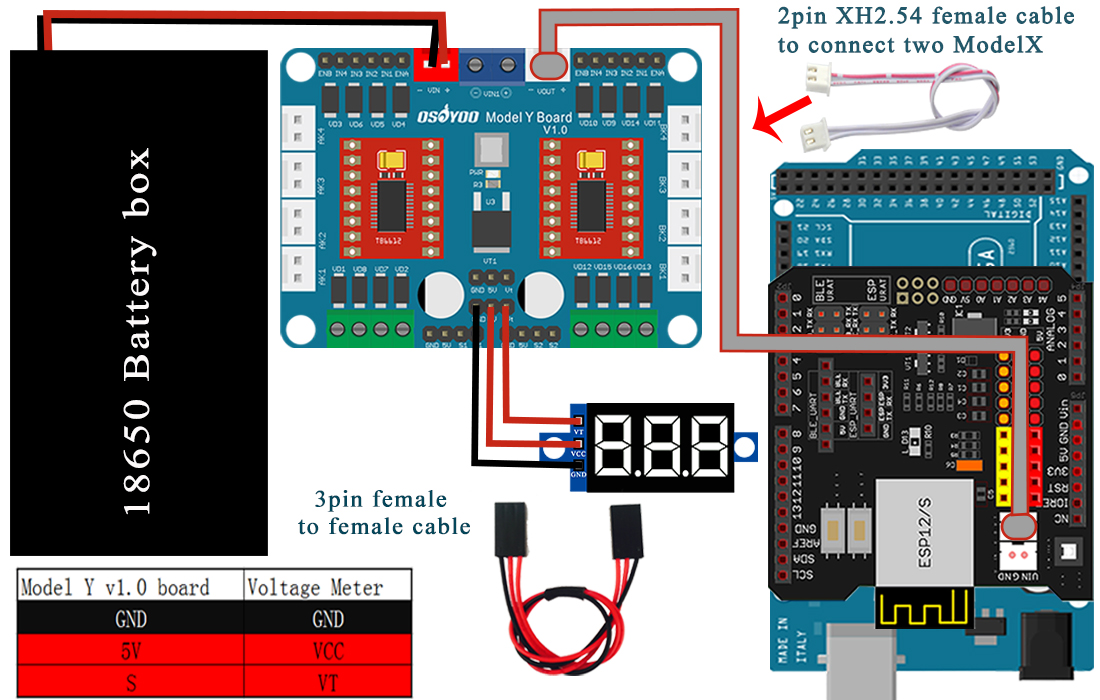
Verbinden Sie das Spannungsmessgerät mit dem OSOYOO Model Y Board mit einem 3-poligen Steckbrücken-Kabel (weiblich zu weiblich) gemäß dem folgenden Verbindungsdiagramm.
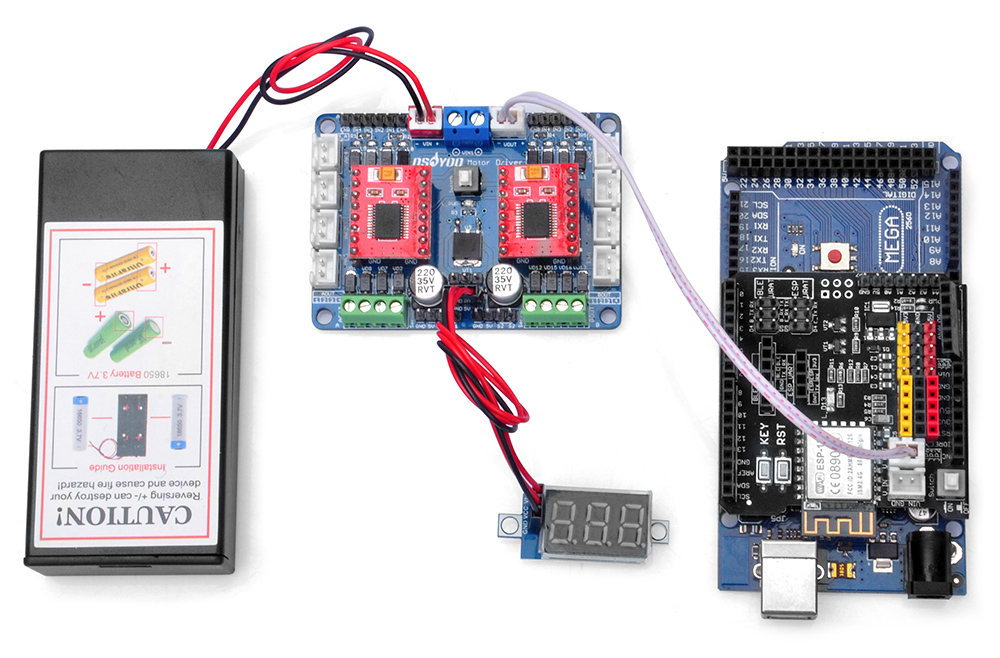
Verbinden Sie den 12V-GND-Anschluss des OSOYOO Model Y Boards mit dem VIN-GND-Anschluss des Boards mit dem OSOYOO 2-poligen PnP-Kabel (20 cm) gemäß der folgenden Abbildung.
Verbinden Sie die Batteriebox gemäß dem folgenden Verbindungsdiagramm mit dem VIN-GND-Anschluss des OSOYOO Uart WiFi Shield.
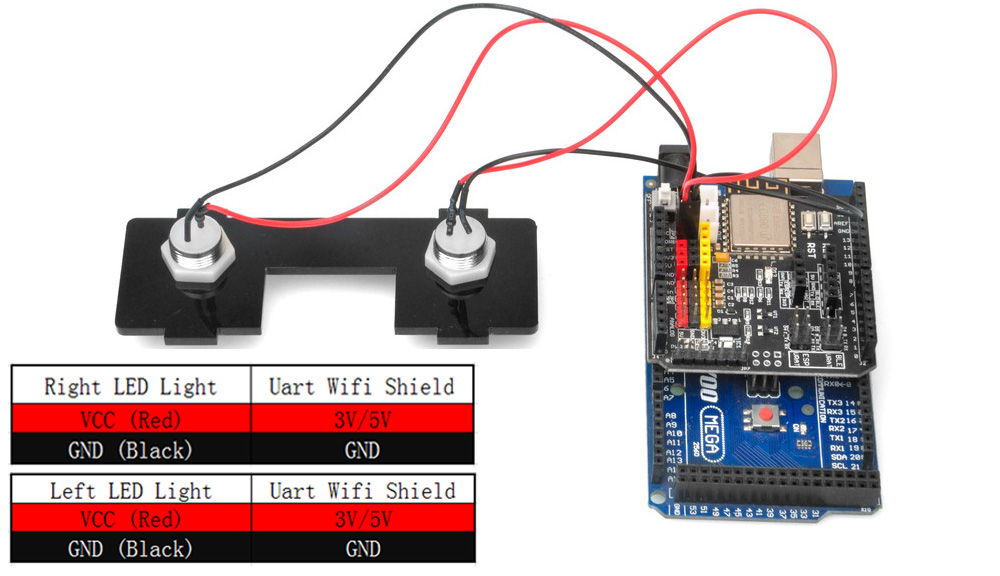
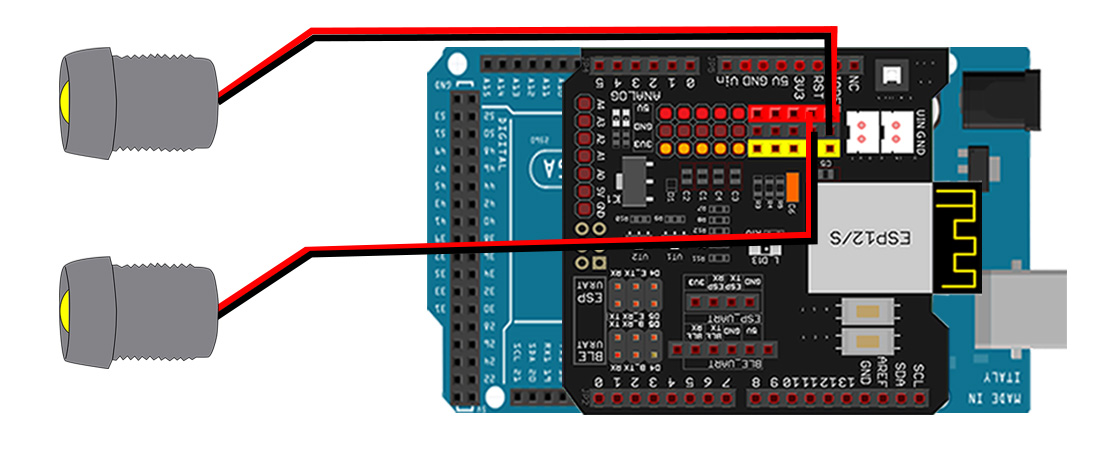
16)Installieren Sie 2 Stück LED-Lichter wie folgt auf der vorderen Querdiaphragma.
Verbinden Sie das LED-Licht wie folgt mit dem OSOYOO Uart WiFi Shield.
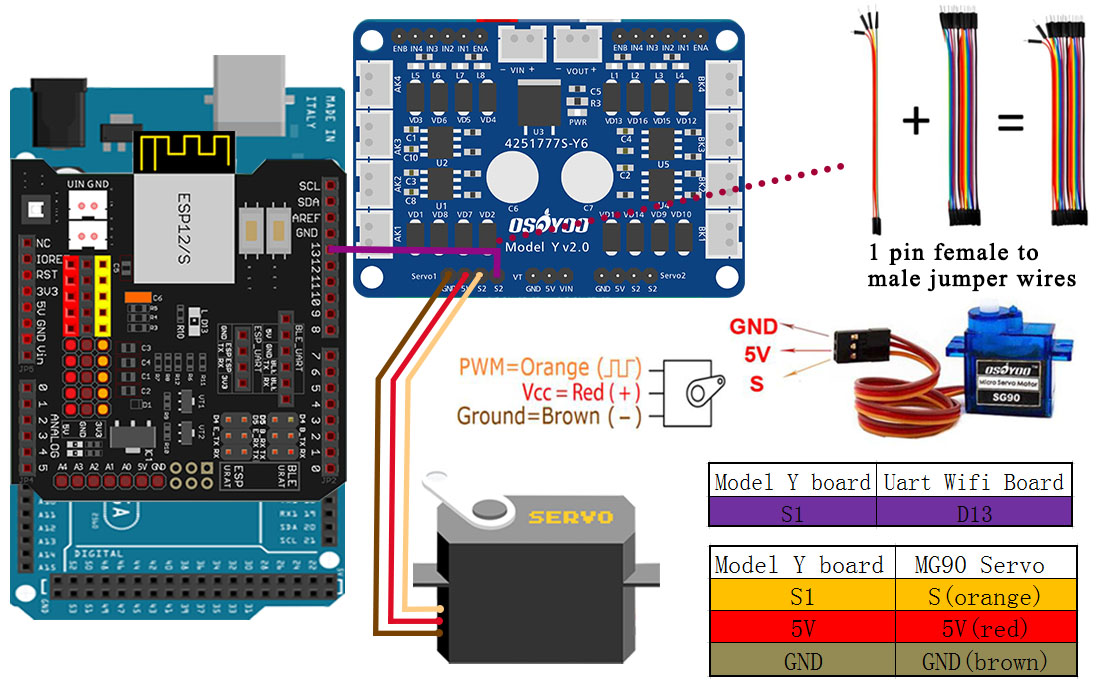
17) Verbinden Sie den SG90-Servomotor, das OSOYOO Model Y Board und das OSOYOO Uart WiFi Shield gemäß dem folgenden Diagramm.
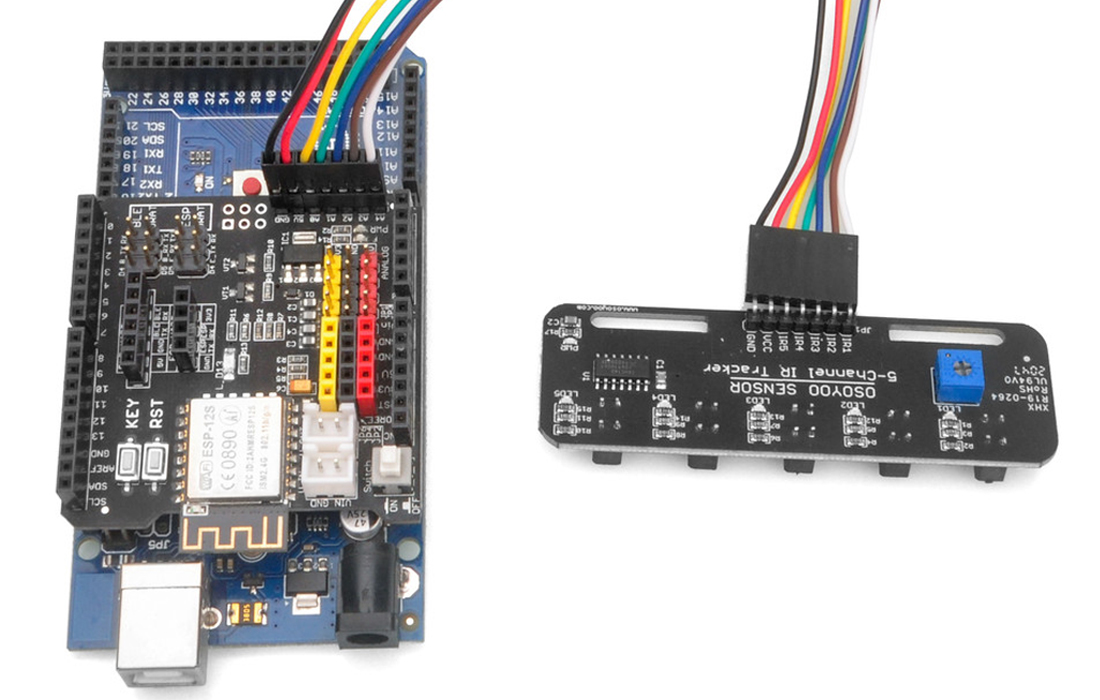
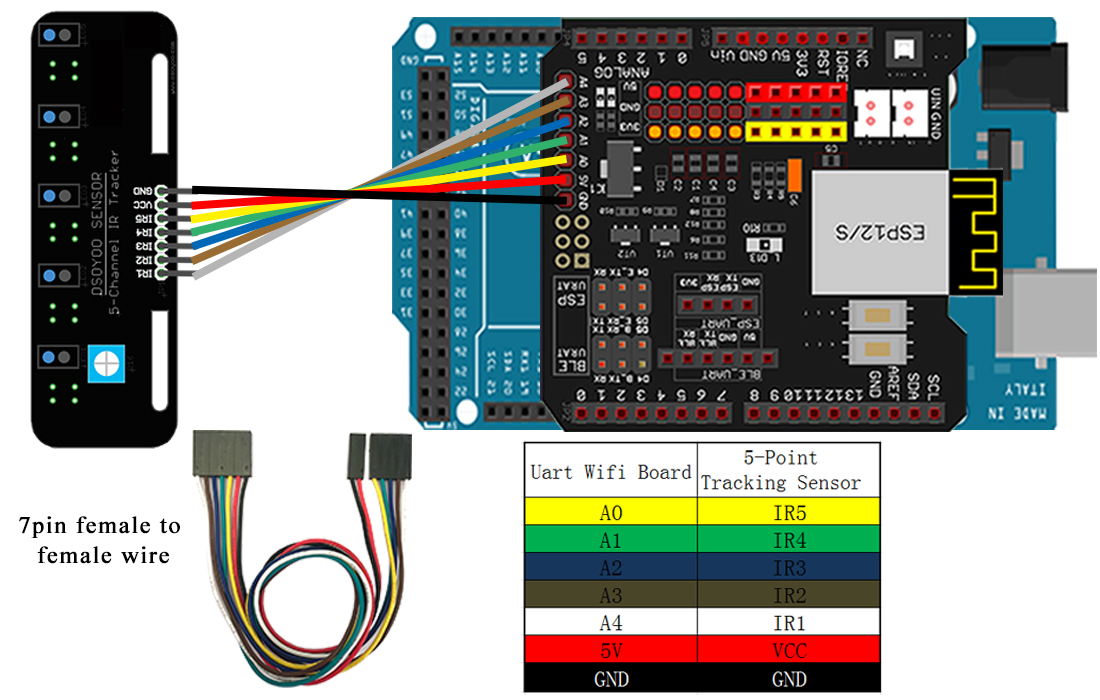
18)Verbinden Sie den GND-VCC-Pin des Tracking-Sensor-Moduls mit GND-5V des OSOYOO Uart WiFi Shield V1.3. Verbinden Sie die Pins IR1, IR2, IR3, IR4 und IR5 mit A4, A3, A2, A3 und A1 mit einem 7-poligen 25cm-Steckbrücken-Kabel (weiblich zu weiblich), wie auf dem folgenden Foto gezeigt..
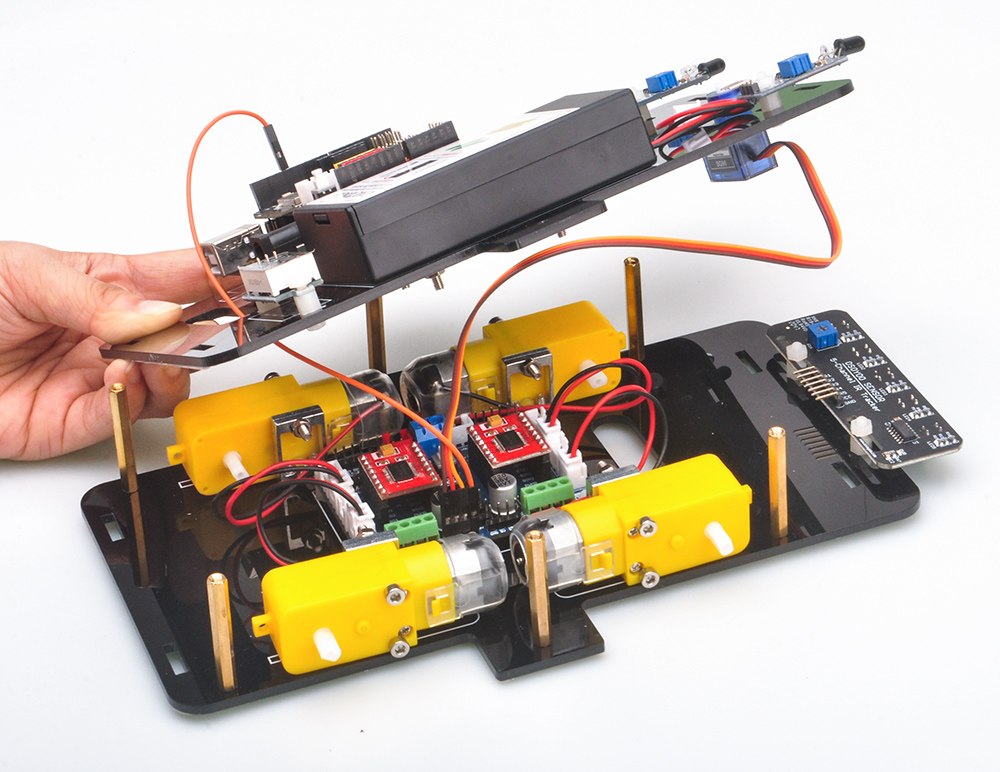
19)Befestigen Sie das obere Chassis mit 6 Stück M3*10 Sechskantschrauben am unteren Chassis.
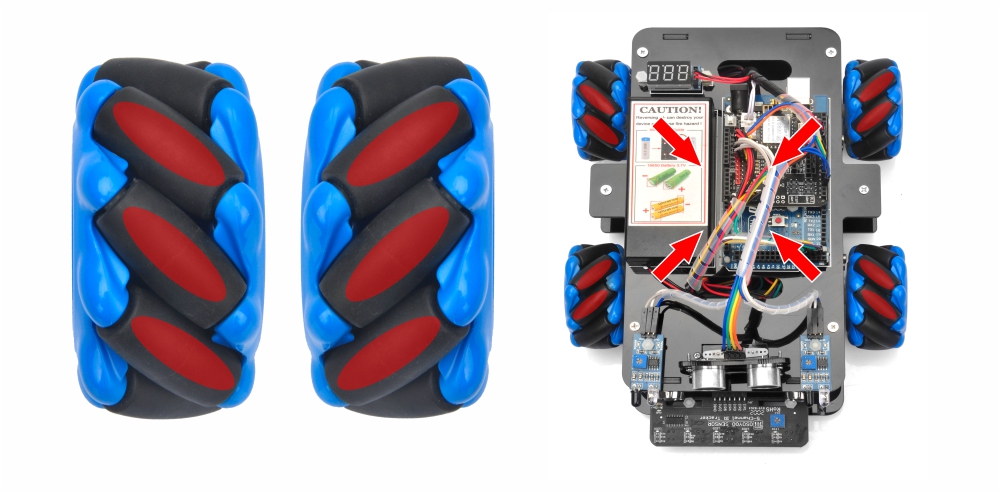
20)Installieren Sie 4 Räder mit 4 Stück M2.2×22 Schrauben oder M2.5X20 Schrauben auf den Motoren.
Besondere Hinweis: Einige Benutzer haben möglicherweise festgestellt, dass die M2.2-Schraube möglicherweise zu kurz ist, um das Rad am Auto zu befestigen. Wenn dies bei Ihnen der Fall ist, kontaktieren Sie bitte den OSOYOO-Support ([email protected]) und fordern Sie kostenlose neue M2.5×20-Schrauben an.
Hinweis: Es gibt zwei Arten von Rädern, stellen Sie sicher, dass die Rollen, wenn sie von oben betrachtet werden, zum Zentrum des Autos zeigen.
Die Hardwareinstallation ist fast abgeschlossen. Bevor wir die 18650-Batterien in die Box einsetzen, müssen wir zuerst den Beispielcode in den Arduino hochladen.
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie bereits eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie diesen Schritt bitte). Laden Sie die Arduino IDE von der Webseite herunter https://www.arduino.cc/en/Main/Software?setlang=en , then install the software.
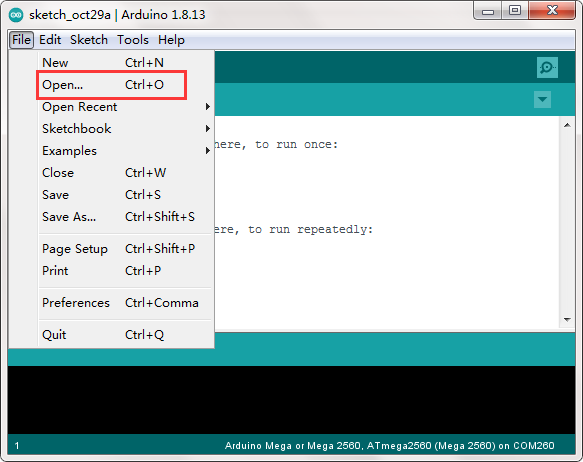
Schritt 3: Verbinden Sie das Mega2560 Board mit dem PC über das USB-Kabel. Öffnen Sie die Arduino IDE und klicken Sie auf “Datei” -> “Öffnen”. Wählen Sie den Code “mc-lesson1.ino” im Ordner “lesson1” aus und laden Sie den Code in den Arduino.
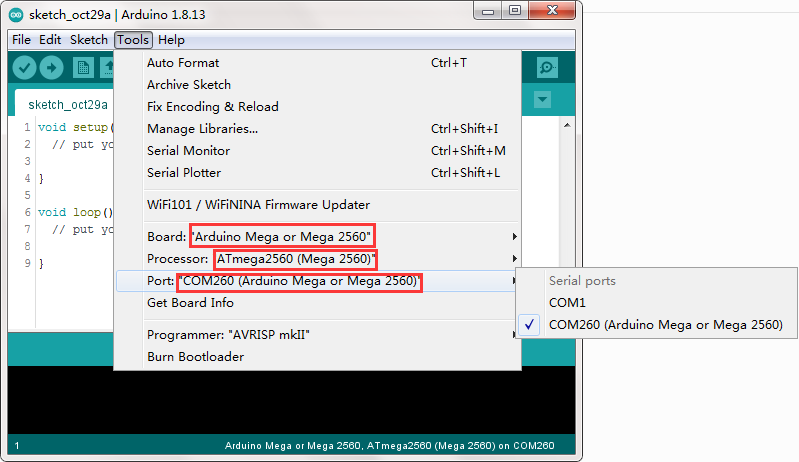
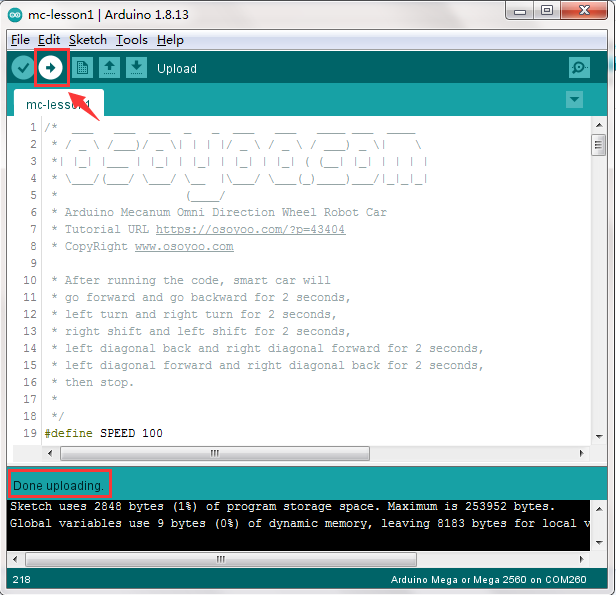
Schritt 4: Wählen Sie das entsprechende Board/Port für Ihr Projekt aus und laden Sie den Sketch auf das Board hoch.
Hinweis: Wenn das Auto über USB läuft (d. h. die Räder drehen sich, wenn es nicht auf dem Boden steht), aber nicht funktioniert, wenn der USB abgesteckt ist und die Batterien ordnungsgemäß eingesetzt sind, überprüfen Sie den Schalter des Doppel-Treiber-Y-Boards. Wahrscheinlich wurde er versehentlich nach oben geschoben. Er kann mit einem Schraubendreher heruntergedrückt werden, ohne das Oberteil und das Unterteil auseinandernehmen zu müssen.
Trennen Sie den Arduino vom PC, legen Sie die Batterie in die Batteriebox. Wenn Sie das Auto auf den Boden stellen, schalten Sie den Schalter auf dem OSOYOO Uart WIFI Shield V1.3 und den Schalter an der Batteriebox ein, falls Sie eine Batteriebox für 18650 installiert haben.
Das Auto sollte vorwärts fahren→ dann rückwärts→sich nach links drehen→sich nach rechts drehen→sich nach rechts parallel verschieben→ sich nach links parallel verschieben→sich nach unten links diagonal bewegen→ sich nach oben rechts diagonal bewegen→ sich nach oben links diagonal bewegen→sich nach unten rechts diagonal bewegen und dann anhalten.













Thank You.