Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
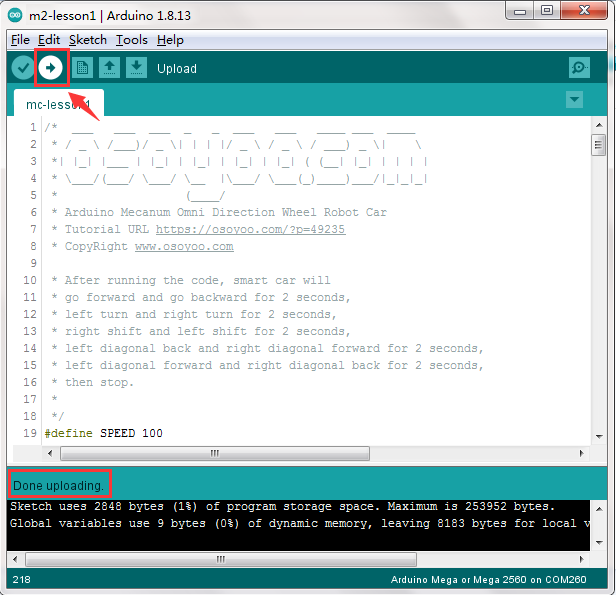
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.














 ステップ14:
ステップ14:




Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.