インストール動画
VIDEO
正規オンライン販売店
OSOYOOで購入
米国で購入
英国で購入
ドイツで購入
イタリアで購入
フランスで購入
スペインで購入
日本で購入
製品説明
OSOYOO FlexiRover ロボットカーキット(Arduino Mega2560用)は、上級者向けに設計された多機能なロボット制作プラットフォームです。WiFi拡張モジュール付きのMega2560互換ボードを搭載しており、遠隔操作やモニタリングが可能です。前輪には520モーター(ケーブル付き)、後輪には高精度な制御を実現するエンコーダー付き520モーターを採用し、ロボットアプリケーションにおける正確な動作制御に最適です。
主な特徴:
WiFi対応Mega2560ボード :WiFiモジュールを搭載したMega2560互換Arduinoボードにより、遠隔操作・IoTアプリケーション・データ通信などの無線接続が可能になり、ロボットプロジェクトの可能性が大きく広がります。
エンコーダー付き520モーター :520モーターによってスムーズな動作を実現し、後輪のエンコーダーが速度と方向を精密に制御します。ナビゲーションや障害物回避に最適です。
全方向移動可能なメカナムホイール :付属のメカナムホイールにより、あらゆる方向への移動が可能です。複雑な環境や機敏なナビゲーションが求められるアプリケーションに幅広く対応します。
4輪駆動対応モータードライバーボード :OSOYOO Model Yモータードライバーボードは最大4つのモーターを独立して制御でき、高度な制御スキームや柔軟な駆動メカニズムを実現します。
カスタマイズ可能なシャーシ :シャーシにはセンサー・アーム・カメラなどの追加部品を取り付けるための穴があらかじめ開けられており、特定のタスクに合わせてロボットを自由にカスタマイズできます。
仕様
番号
画像
部品名
数量
仕様
購入リンク
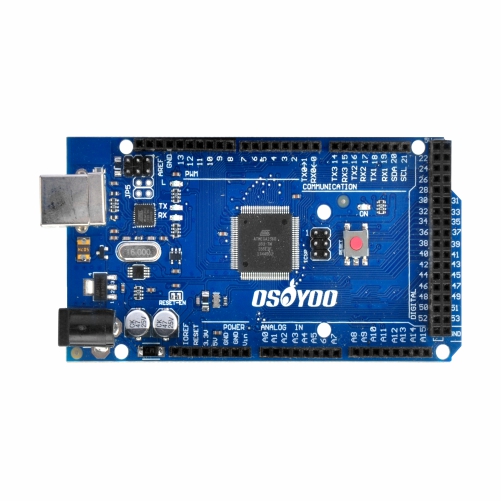
1
OSOYOO基板
1
詳細はこちら 購入はこちら
2
OSOYOO Uart Wi-Fiシールド V1.3
1
詳細はこちら 購入はこちら
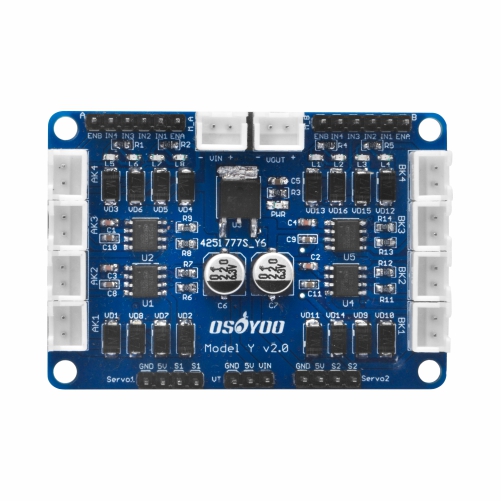
3
OSOYOO Model Y モータードライバーモジュール
1
詳細はこちら 購入はこちら
4
電圧計
1
詳細はこちら 購入はこちら
5
3-in-1電源アダプター
1
詳細はこちら 購入はこちら
6
エンコーダー付き520モーター
2
データシート 購入はこちら
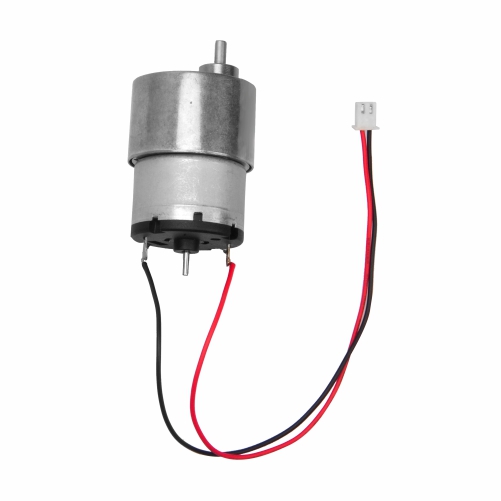
7
ケーブル付き520モーター
2
データシート 購入はこちら
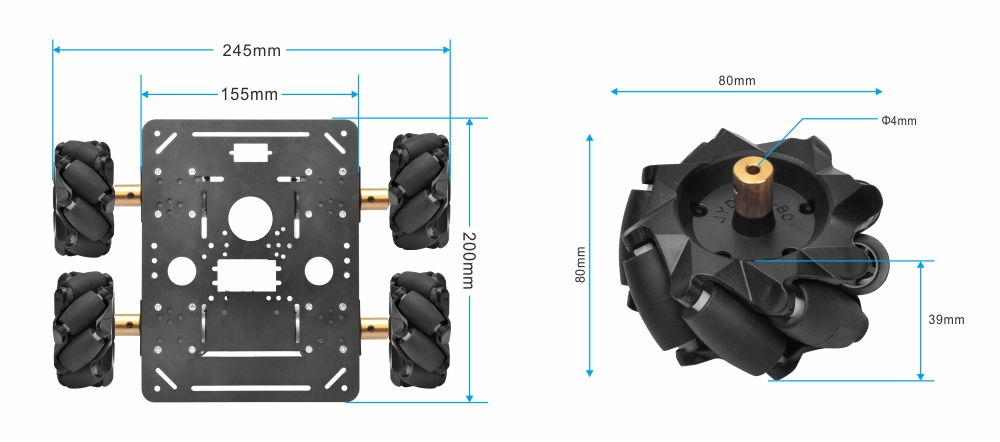
8
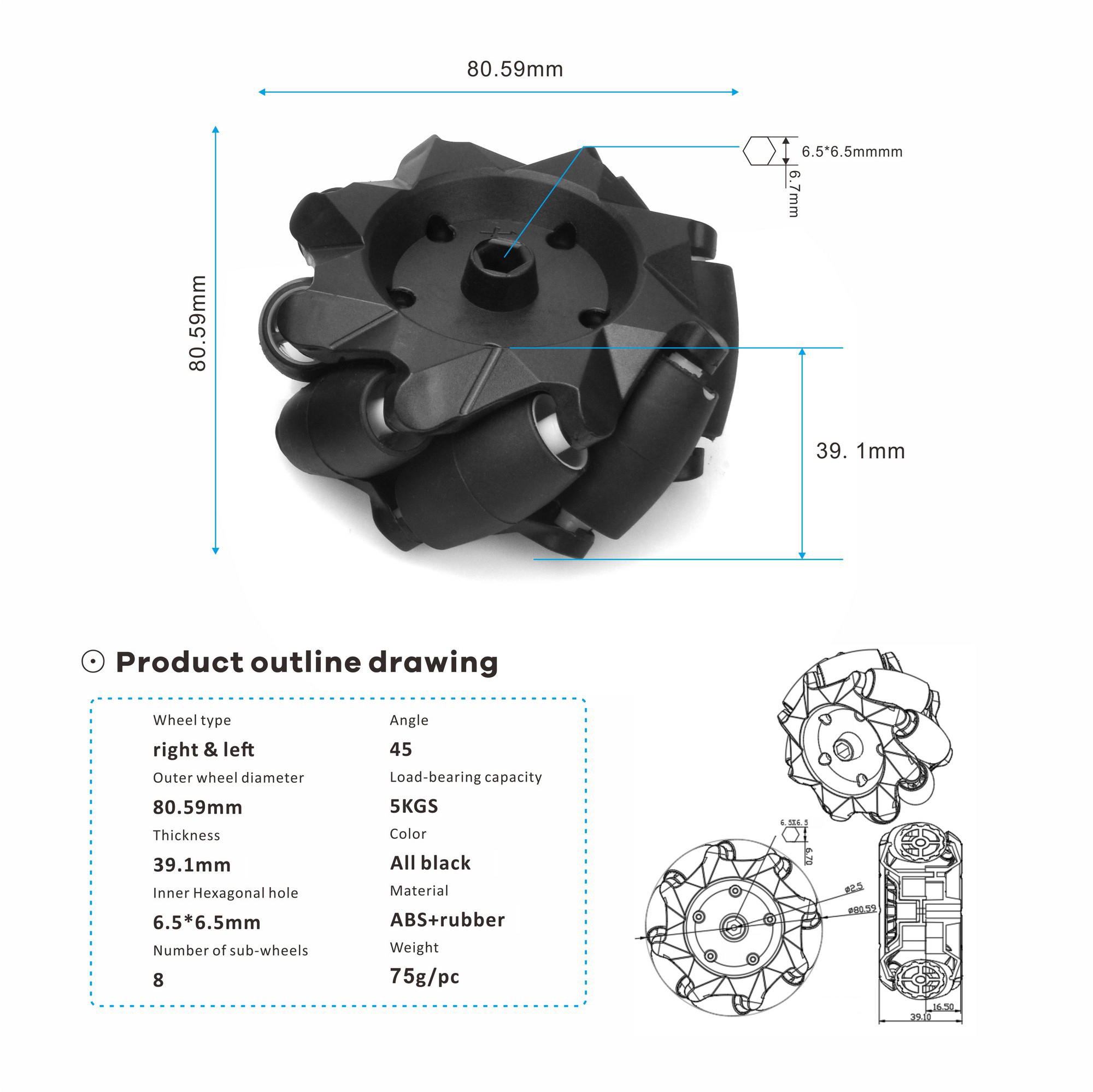
メカナムホイール
4
データシート 購入はこちら
9
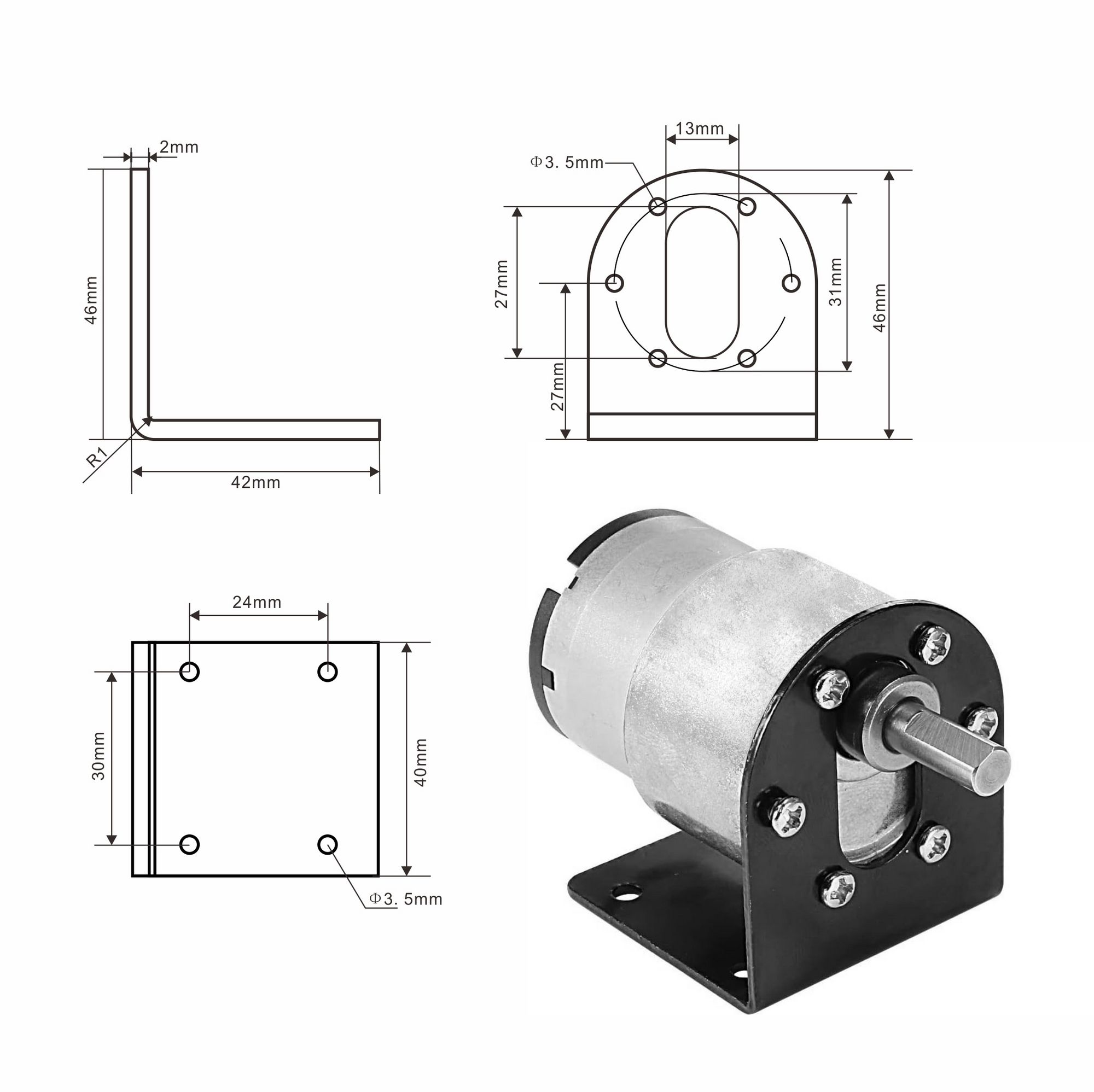
37mm金属製モーターホルダー
4
Fit for : 37mm Geared Motor; Bracket Size: 48 x 42 x 40mm; Ellipse Hole Size: 27 x 13mm ; Diameter of Bracket Mounting Hole : 3.5mm Outline drawing Model No.: 2018003600
購入はこちら
10
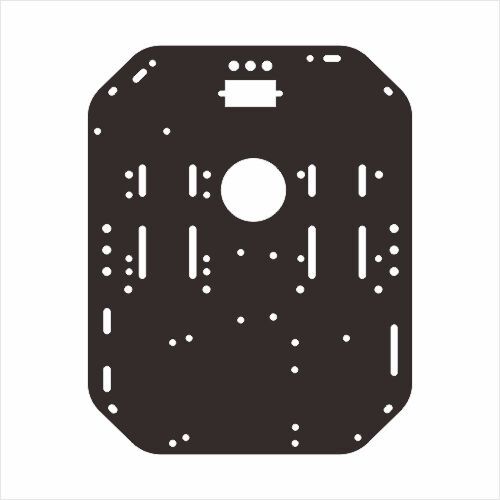
シャーシ第1層
1
購入はこちら
11
シャーシ第2層
1
購入はこちら
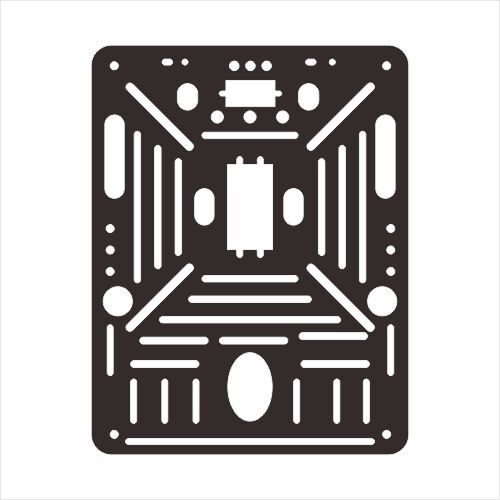
12
シャーシ第3層
1
購入はこちら
13
エンコーダー用ジャンパーワイヤー
2
長さ:25cm
標準2.54mmピッチ
メスからオス、6ピンから6ピン
OSOYOO 520モーターエンコーダーからArduinoボード 専用に設計Model No.: 2024007000
購入はこちら
14
6ピンオス-メスジャンパーワイヤー
2
長さ:25cm
標準2.54mmピッチ
片端:XH2.54メスコネクター6ピン;もう片端:2.54mmピッチオスピン6ピン
OSOYOOモータードライバーボード とUNO/Mega/OSOYOO WiFiシールド の接続専用に設計Model No.: 2019004900
購入はこちら
15
3pin female to 3pin female jumper wire
1
長さ:15cm
標準2.54mmピッチ
3ピンXH2.54メスコネクターから3ピンXH2.54メスコネクター
カラー:黒・赤・赤
OSOYOO電圧計 とOSOYOOモータードライバーボード の接続専用に設計Model No.: 2018002400
購入はこちら
16
OSOYOO 2ピンPnPケーブル 20cm
1
長さ:20cm
2ピンJST XH2.54メスコネクターから2ピンJST XH2.54メスコネクター
OSOYOO WiFiコネクター とOSOYOOモータードライバーボード の接続専用に設計Model No.: 2019016300
購入はこちら
17
オス-メスジャンパーワイヤー
1
オス-メスジャンパーワイヤー
ケーブル長:20cm(7.9インチ)
2.54mmピッチ 1ピン-1ピン デュポンコネクター
分離可能な10色の柔軟なジャンパーケーブル
Model No.: 2019011100
購入はこちら
18
メス-メスジャンパーワイヤー
1
メス-メスジャンパーワイヤー
ケーブル長:20cm(7.9インチ)
2.54mmピッチ 1ピン-1ピン デュポンコネクター
分離可能な10色の柔軟なジャンパーケーブル
Model No.: EACW100500
購入はこちら
19
18650バッテリーボックス
1
3.7V 18650バッテリー用
カバー付き2スロットバッテリーホルダー
電源スイッチ付き
2ピンJST XH2.54メスコネクター
サイズ:約92×43×22mm
ケーブル長:約150mm
Model No.: 2018001700
購入はこちら
20
18650バッテリー充電器
1
Micro USB input universal battery charger
充電スロット:2
入力電圧:DC 5V
出力電圧:4.2V/500mAh
サイズ:92×42×30mm
重量:33g
USB-Cケーブル長:500mm
LED残量インジケーター付き
対応バッテリー:18650、16340、26650、AA、AAA(長さ30〜68mm)
内蔵保護機能:短絡、逆接、不良セル検出、安全タイマー
Model No.: 2019006900
購入はこちら
21
18650バッテリー(オプション)
1
容量:2000mAh(±3%)
電圧:3.7V
サイズ:18×67mm
重量:45g/本
Model No.: 2019006800
購入はこちら
22
ネジセット
1
内容:マイナスドライバー×1、六角レンチ×1、M3×8ネジ×60、M2.5プラスチックネジ+スペーサー+ナットセット×12、M3×65+6銅スペーサー×4、M3×40銅スペーサー×10、M3×10ネジ+ナット×30、M2.5×20ネジ×4、モーターカップリング×4
Model No.: 2024006100
購入はこちら
拡張性抜群のシャーシ
カラー
名称
対応部品
青い丸(下図参照)
37mm金属製モーターホルダー —— JGB37-550/545/520等の超高トルクモーターに対応
25mm金属製モーターホルダー —— JGB25-370/310等の高トルクモーターに対応
TT金属製モーターホルダー —— TTモーター用
赤い丸(下図参照)
OSOYOO Model Yモータードライバー / OSOYOO Model Xモータードライバー / L298Nモータードライバー用
緑の丸(下図参照)
SG90/MG995/MG996サーボモーター用
黄色の丸(下図参照)
18650バッテリーケース / 9Vバッテリーケース等用
ピンク紫の丸(下図参照)
ラインセンサー / OSOYOO 5チャンネルラインセンサー / IR障害物センサー / IR受信機 / IR送信機等用
紫の丸(下図参照)
Arduino UNO R3 / Arduino UNO R4 / Arduino UNO WIFI等用
Arduino Mega2560 / Arduino DUE用
濃紺の丸(下図参照)
Raspberry Pi 5/4/3B/3A+/3B+/2B用
シャーシ第1層の設計ファイル:http://osoyoo.com/picture/flexirover/1st_layer.dwg
シャーシ第2層の設計ファイル:http://osoyoo.com/picture/flexirover/2nd_layer.dwg
シャーシ第3層の設計ファイル:http://osoyoo.com/picture/flexirover/3rd_layer.dwg
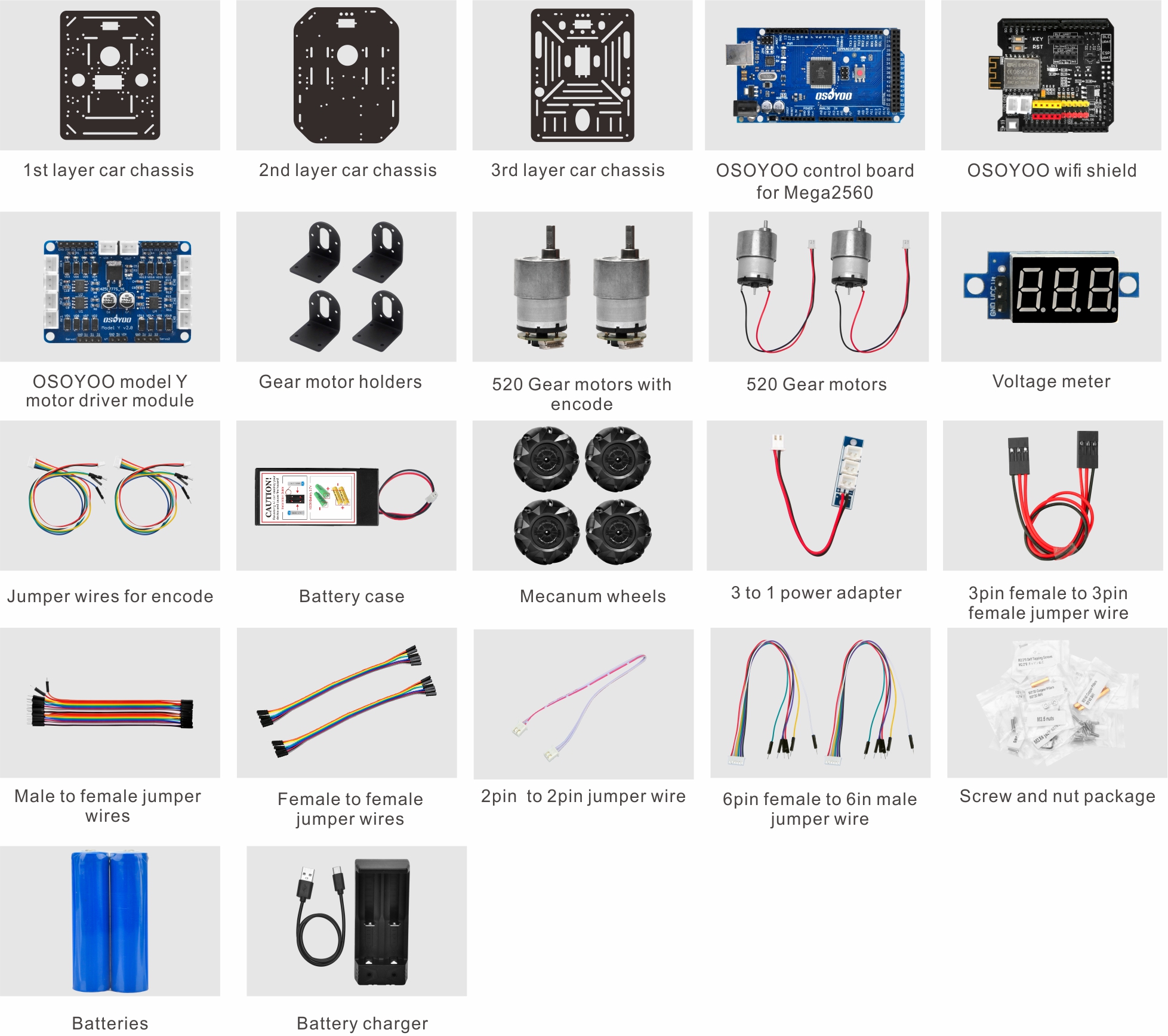
パッケージ内容
パーツの取り付け
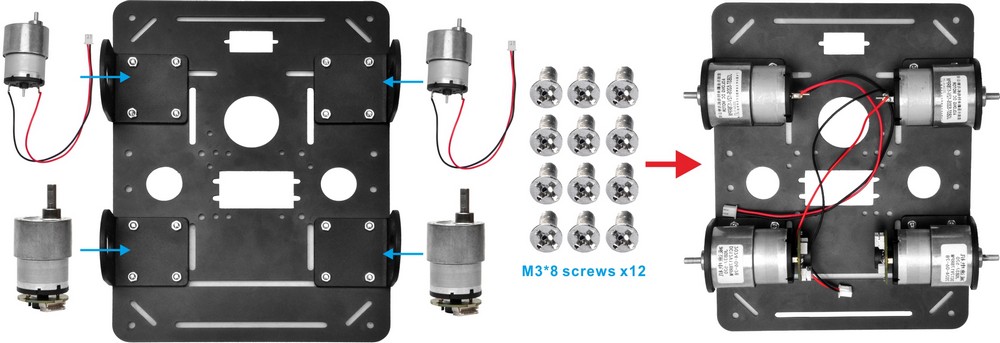
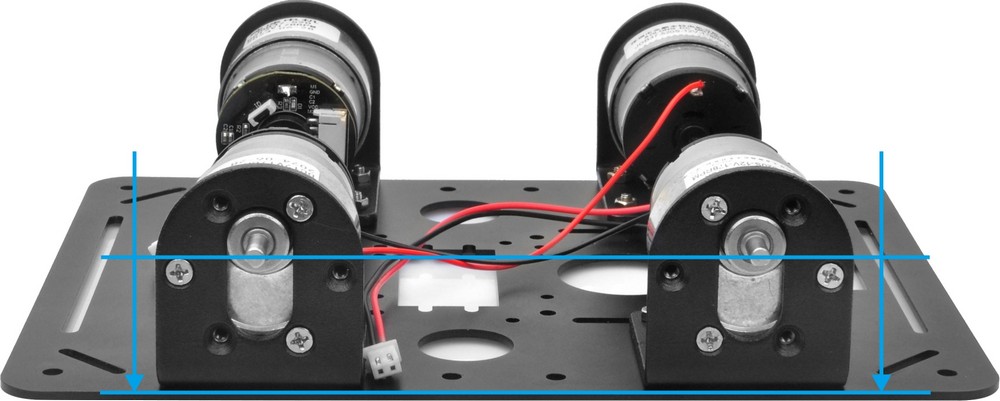
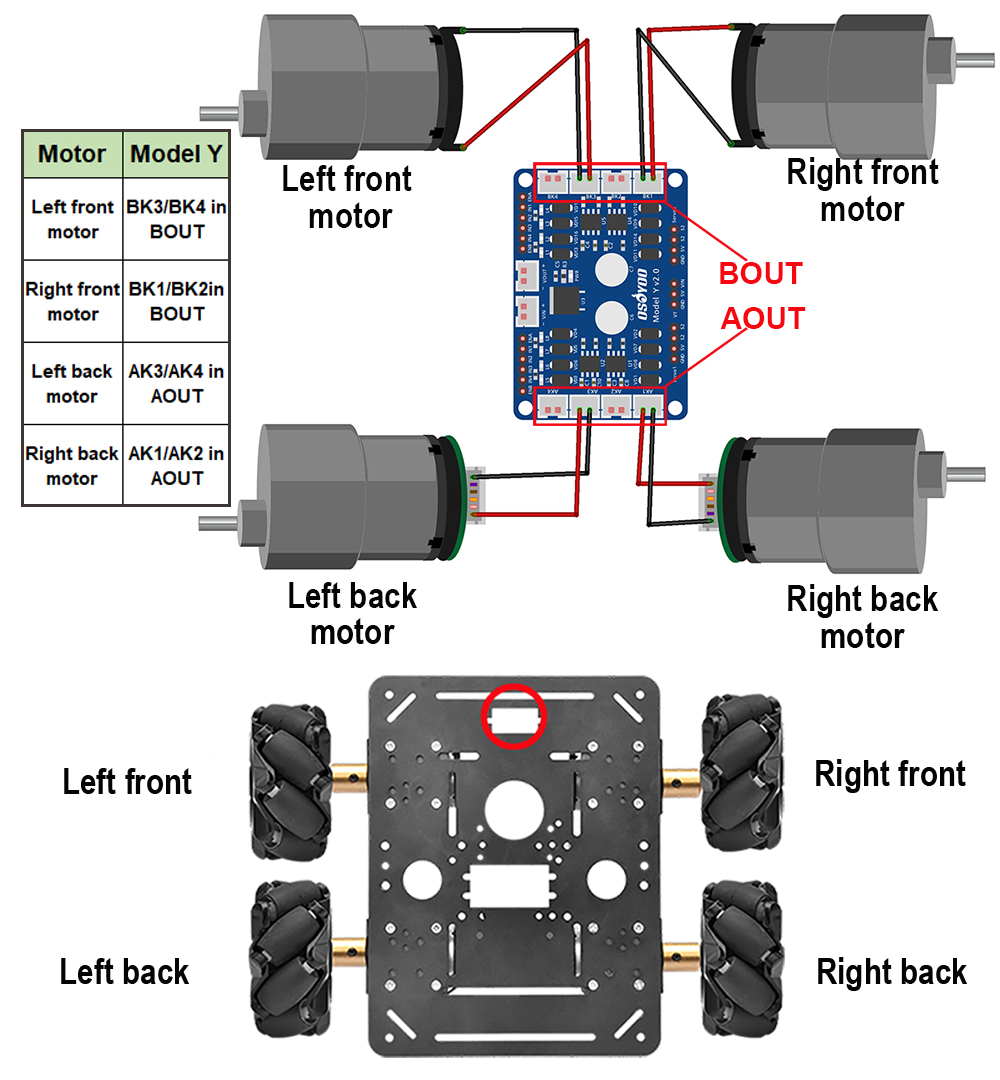
ステップ1. 下の写真のように、M3×10ネジとM3ナットを使ってギアモーターホルダーをシャーシ第1層(金属)に取り付けます。ステップ2. ケーブル付き520ギアモーター を2個シャーシ前方のモーターホルダーに、エンコーダー付き520モーター を2個シャーシ後方のモーターホルダーにM3×8ネジで取り付けます。
注意: 4本のモーター軸を同じ高さに揃えてください
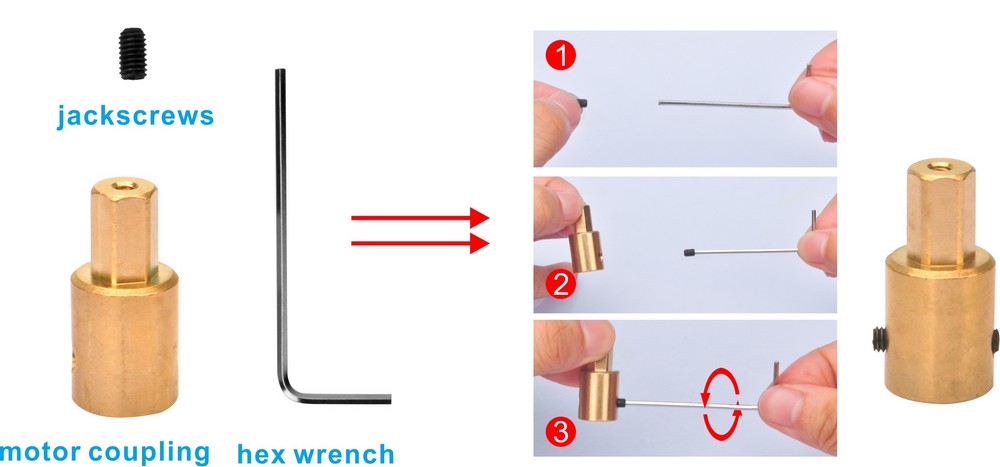
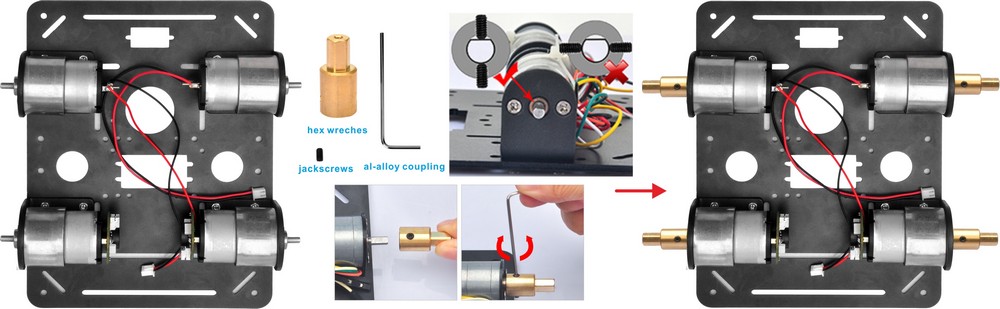
ステップ3. アルミ合金カップリングにジャックスクリューを取り付け、下の写真のようにしっかり締めてカップリングをモーターに固定します。注意:520ギアモーターの軸には平面(フラット)があります。ジャックスクリューの1本をその平面部分に当て、両方のジャックスクリューを軸にしっかり締め付けてください。
ステップ4. 4個のメカナムホイール をM2.5×20ネジ4本でアルミ合金カップリングに取り付けます:
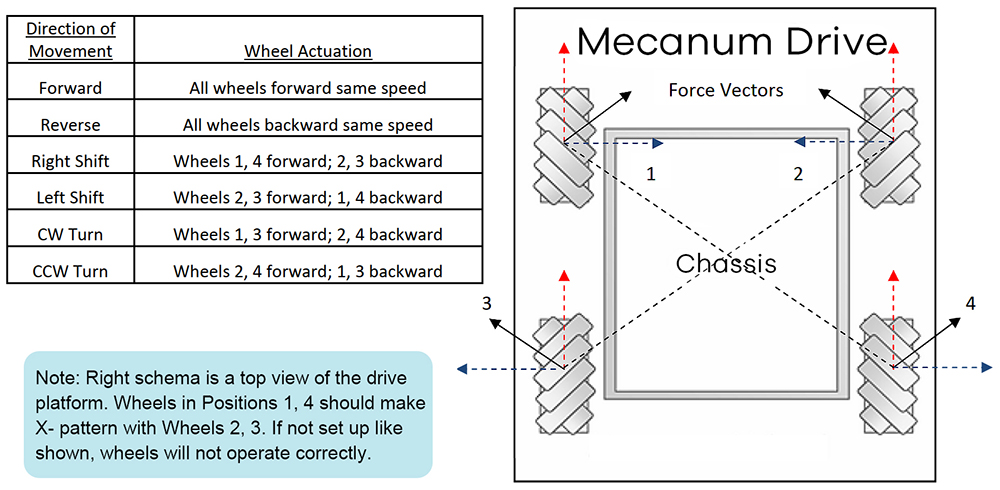
Note: There are two types of Mecanum wheels, left and right Mecanum wheel; the difference between them is the orientation of rollers. A correct configuration requires each of four wheels is set in the way as shown below, where the rotation axis of each wheel’s top roller points to the center of the platform. Please notice that all the dynamic analysis and pre-written codes are based on this configuration.
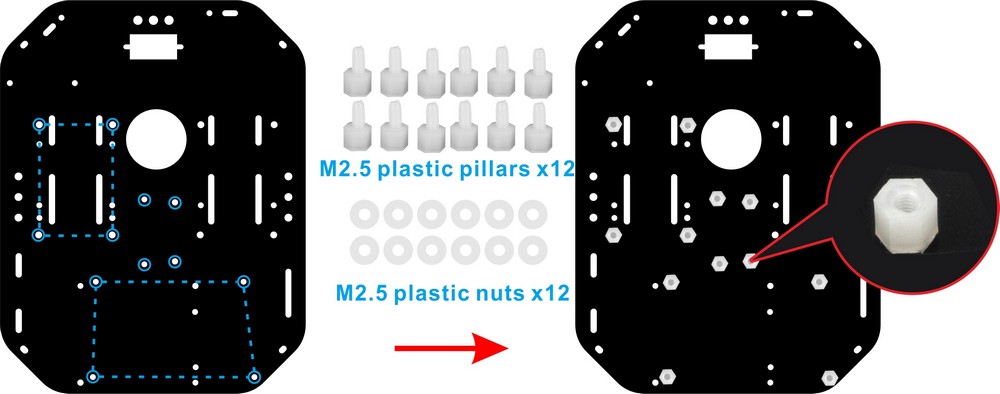
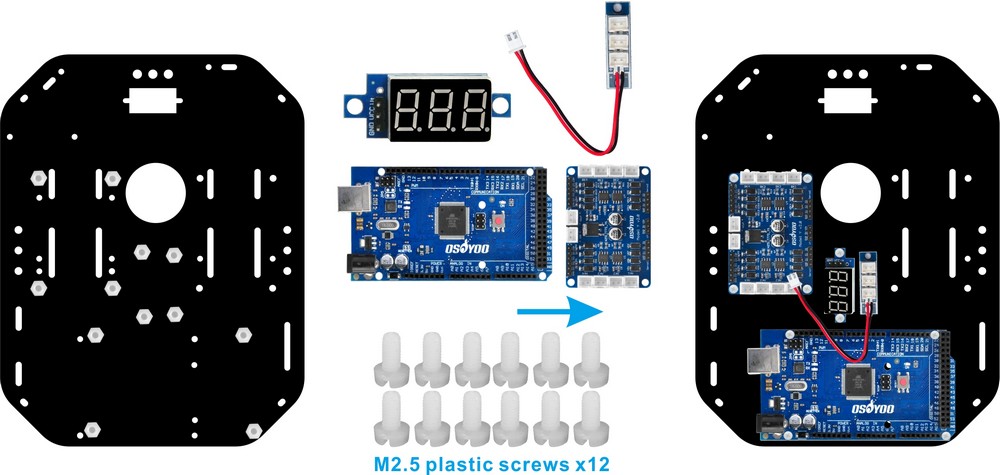
ステップ5. シャーシ第2層(アクリル)にM2.5プラスチックスペーサーとナットを12個取り付け、3-in-1電源アダプター ・電圧計 ・OSOYOO Mega2560コントロールボード ・OSOYOO Model Yモータードライバーモジュール をM2.5プラスチックネジで固定します:
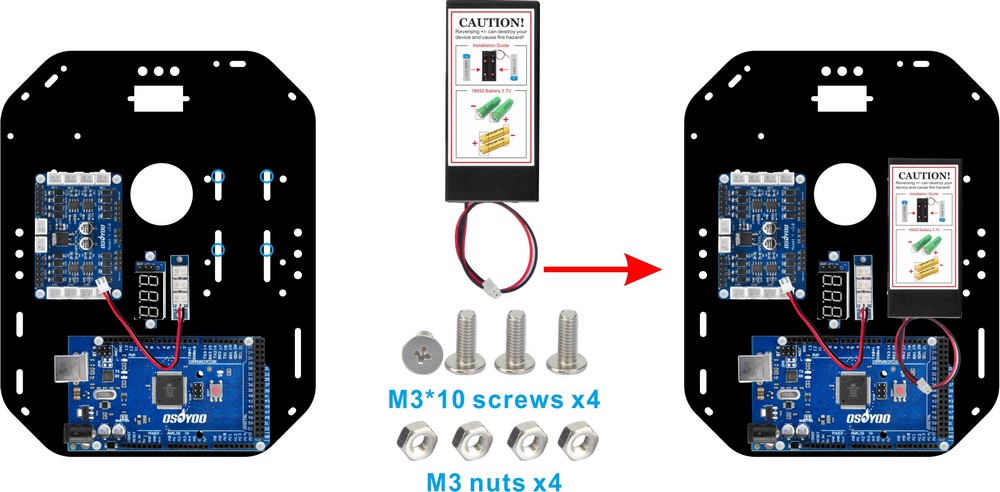
ステップ6. 下の写真のように、M3×10ネジとナット4個でバッテリーボックスをシャーシ第2層に取り付けます。
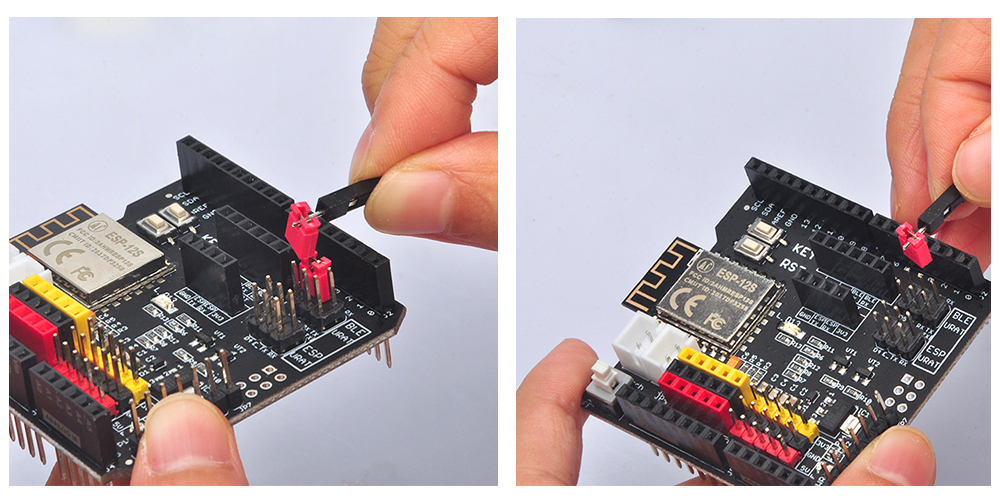
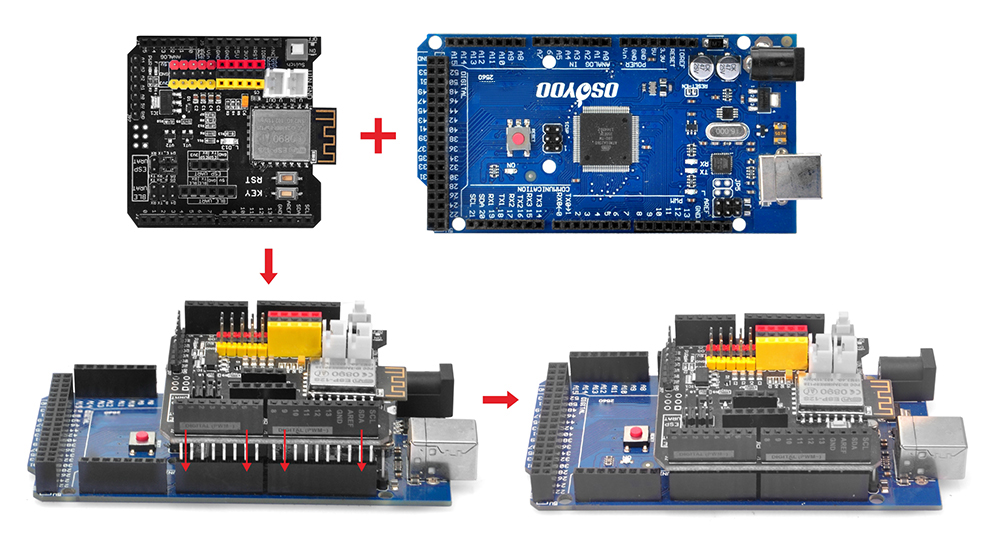
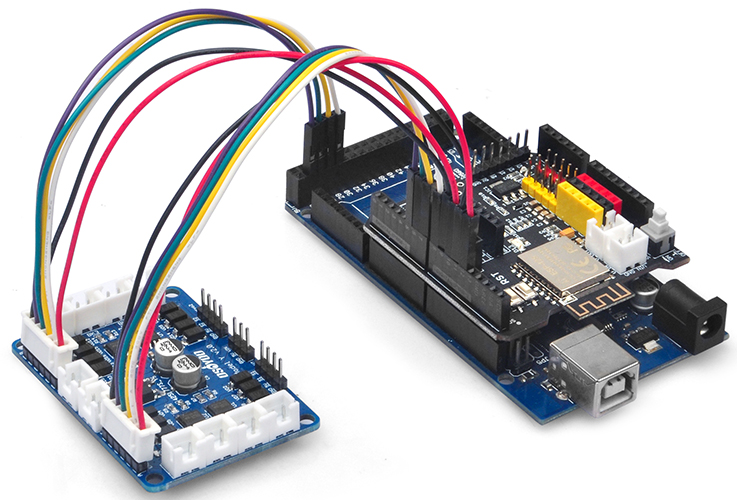
ステップ7. OSOYOO Wi-Fiシールド からジャンパーキャップ OSOYOO Mega2560コントロールボード に差し込みます。
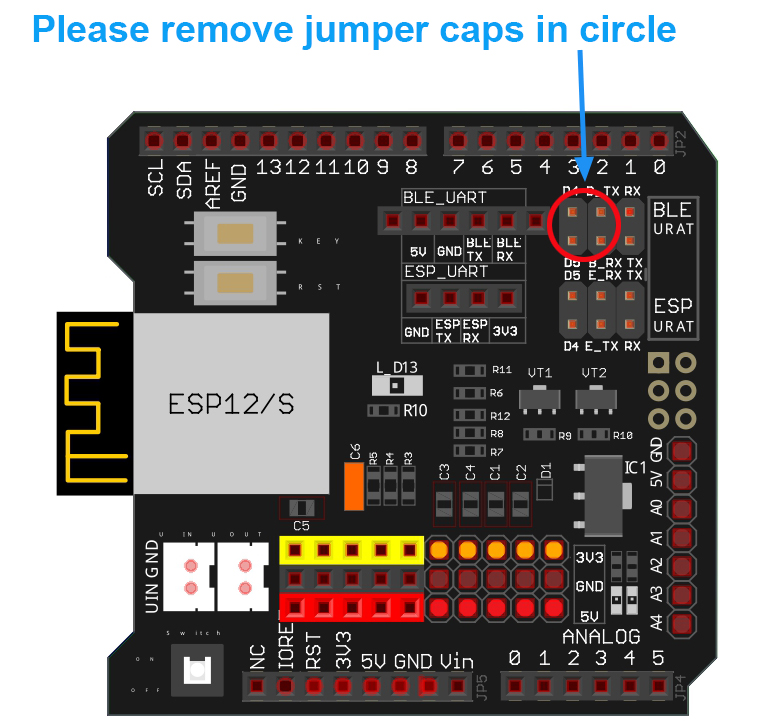
0. 配線の前に、OSOYOO Wi-Fiシールド がMegaコントロールボード に挿入済みであること、および赤いジャンパーキャップ が取り外されていること を確認してください。
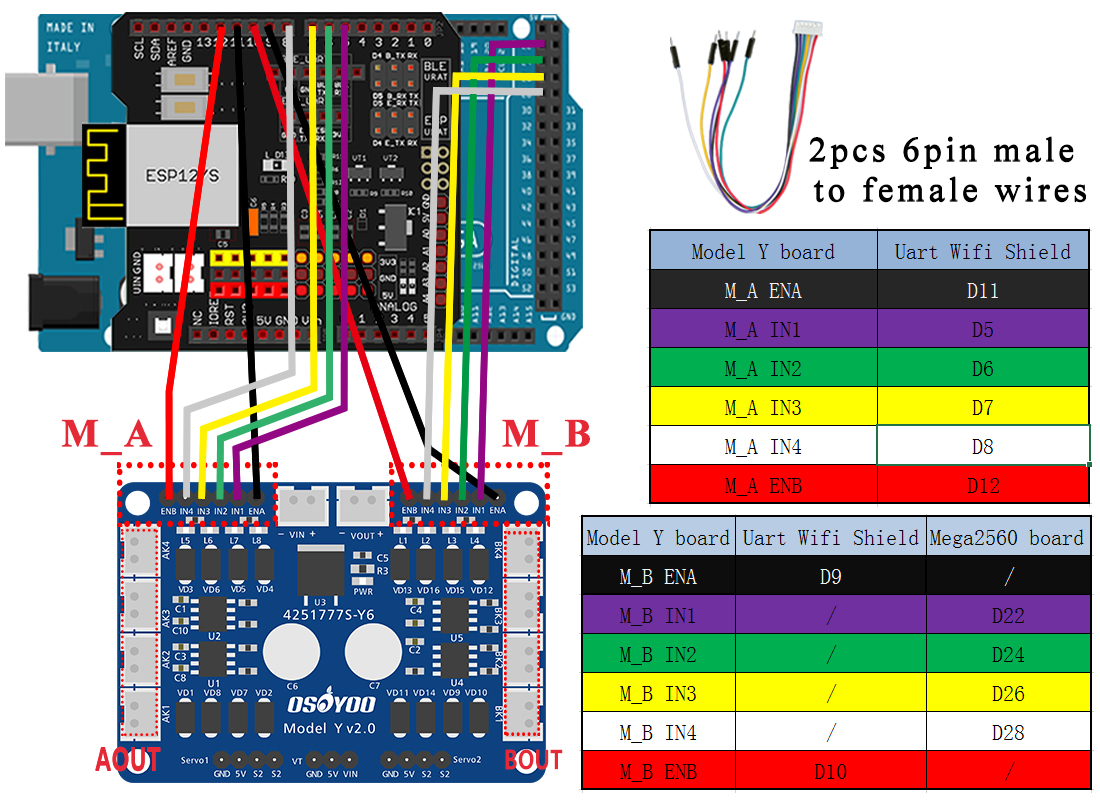
2. Model YのM_A ENA、IN1、IN2、IN3、IN4、ENB をWiFiシールドのD11、D5、D6、D7、D8、D12 に接続します。
Model YのM-B ENA、ENB をWiFiシールドのD9、D10 に接続し、Model YのM_B IN1、IN2、IN3、IN4 をOSOYOO Mega2560コントロールボードのD22、D24、D26、D28 に接続します。
注意:
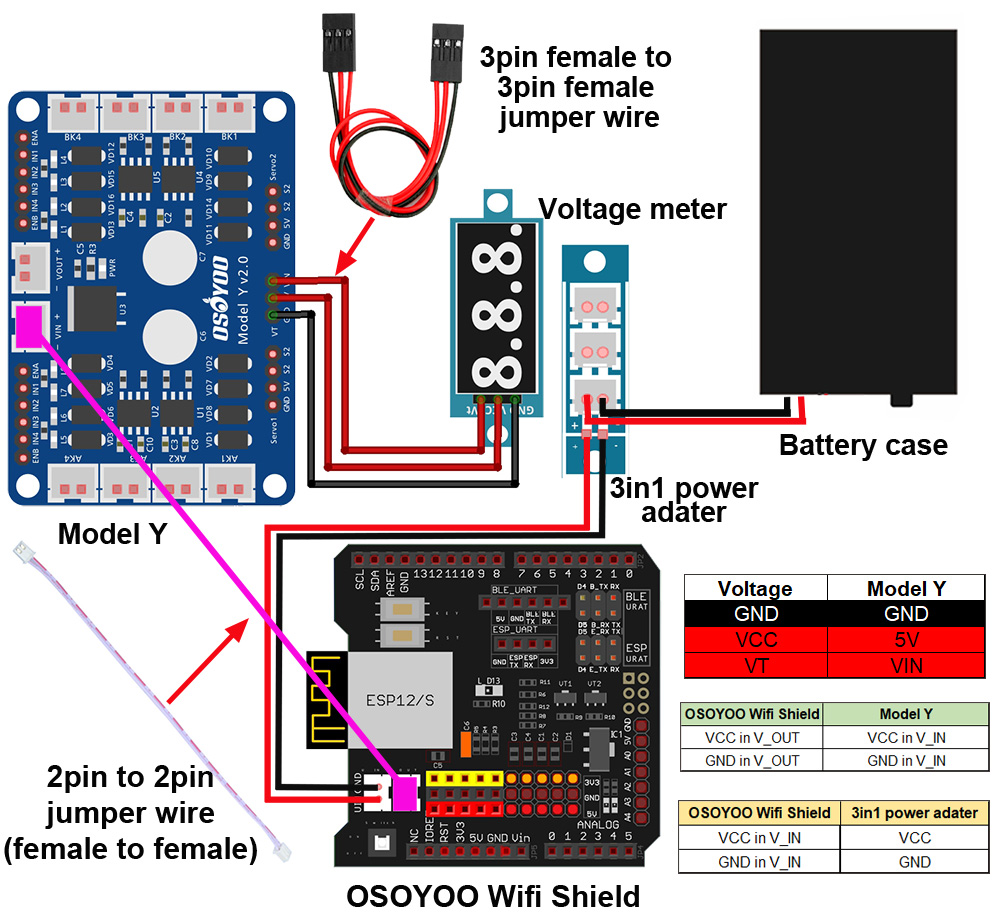
3. Connect voltage meter to model Y motor driver board with 3pin female to 3pin female jumper wire; connect V_OUT socket of OSOYOO WIFI shield to VIN socket of Model Y motor driver board with 2pin to 2pin jumper wire (female to female); insert 2pin plug(s) of battery case(s) into 3in1 power adapter; insert 2pin plug of 3in1 power adapter into V_IN socket of OSOYOO WIFI shield as following:
注意:3-in-1電源アダプターは、同じ電圧の複数バッテリーケース接続用です。
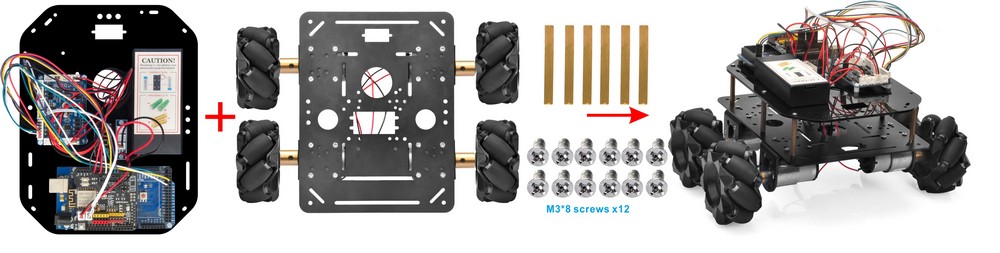
4. M3×40スペーサーでシャーシ第2層を第1層に取り付けます。アクリルシャーシと金属シャーシの前後を確認してください。このステップが完了するとロボットカーは動作可能になります。
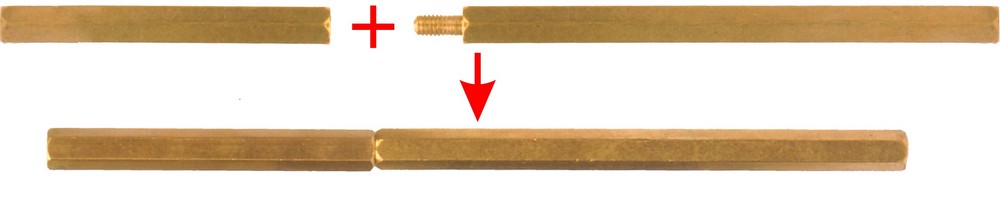
5. If you want to add more sensor, you can install 3rd layer car chassis on the robot car. Tightly screw M3*40 copper pillar with M3*65+6 copper pillar to be long pillar firstly, then Install 3rd layer car chassis on 1st layer car chassis with these long pillars
ステップ1: 最新のArduino IDEをインストールします(バージョン1.1.16以降をお持ちの場合はスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードし、インストールします。
ステップ2:https://osoyoo.com/driver/mecanum_metal_chassis_m2/m2-lesson1.zip をダウンロードし、m2-lesson1.zipを解凍するとm2-lesson1というフォルダが作成されます。
Step 3: Connect Mega2560 board to PC with USB cable, Open Arduino IDE → click file → click Open → choose code “lesson1.ino” in lesson1 folder, load the code into Arduino.
ステップ4: お使いのプロジェクトに合ったボードとポートを選択し、スケッチをボードに書き込みます。
ArduinoをPCから切り離し、バッテリーをバッテリーボックスに入れます。ロボットカーを床に置き、OSOYOO Uart Wi-FiシールドのスイッチとバッテリーボックスのスイッチをONにします。
ロボットカーは次の順に動作します:
前進→後退→左折→右折→右並行移動→左並行移動→右斜め前→左斜め後ろ→左斜め前→右斜め後ろ












































{kind=link}
{kind=link}